
大视场线阵推扫激光3D成像雷达光束整形
2016-10-13 19:34:32杨兴雨苏金善王元庆张冰清
光电工程 2016年4期
杨兴雨,苏金善,,王元庆,张冰清,沈 略
大视场线阵推扫激光3D成像雷达光束整形
杨兴雨1,苏金善1,2,王元庆2,张冰清2,沈 略2
( 1. 伊犁师范学院电子与信息工程学院,新疆维吾尔自治区伊宁835000;2. 南京大学电子科学与工程学院,江苏,南京210046 )
针对传统光束整形的窄带激光束能量主要集中在光束的中间部分,这种能量分布近似于高斯分布,无法满足大视场线阵推扫激光3D成像雷达的技术要求。本文提出一种新型的光束整形技术来解决推扫式激光雷达需要窄带状激光束的问题。该方法根据锥镜的光学特性,采用双轴锥改变激光束的空间能量分布,再经过柱面镜后激光束整形为“U”型窄带状激光束。实验结果表明,整形后的“U”型窄带状激光束能够满足大视场线阵推扫激光三维成像雷达技术要求。
推扫式激光雷达;光束整形;3D成像;窄带激光束
0 引 言
激光光束的能量分布具有高斯分布或者近似于高斯分布[1]的特性,在大视场推扫式激光雷达[2-3]的应用中这种特性导致雷达探测的实际结果受到极为严重的影响,低能量部分的探测信号几乎难以达到预期的探测效果,激光光束整形技术被逐渐应用到激光雷达技术中。激光光束整形技术的范畴很广泛,可以分为空间整形和时间整形。其中空间整形是指改变激光能量在空间上的分布,一般根据实际需求将激光能量整形为平顶光束[4]、环形光束和矩形光束等;时间整形则是指改变激光能量在时间上的分布,典型的应用是改变脉冲型激光器的脉宽,通过不断的压缩单脉冲时间,得到更高输出功率的激光光束。本文所提出的光束整形技术是基于空间整形技术,通过光学手段将能量近似于高斯分布的窄带激光光束整形为两头能量较强,中间能量稍微弱,边缘能量衰减速度较快的U型窄带状激光束。
1 大视场线阵推扫激光3D成像雷达
1.1 大视场模型的建立
激光3D成像雷达[5-6]需要30°以上的视场角,传统雷达方程式(1)适用于在激光照明光斑很小的条件下,这种情况只能适用于单点激光扫描式激光成像雷达,对于大视场激光3D成像雷达则不适用。

线阵推扫式激光3D成像雷达[7]在大视场条件下,地物目标的后向反射分布遵循朗伯余弦定律,此时可将整个视场分割成无数个面积元,每个面积元的后向反射分布都遵循朗伯余弦定律,因此对整个视场内的面积元积分便可得到接收传感器(APD)所接收的总的激光功率。从而建立线阵推扫激光3D成像雷达大视场模型如图1所示。
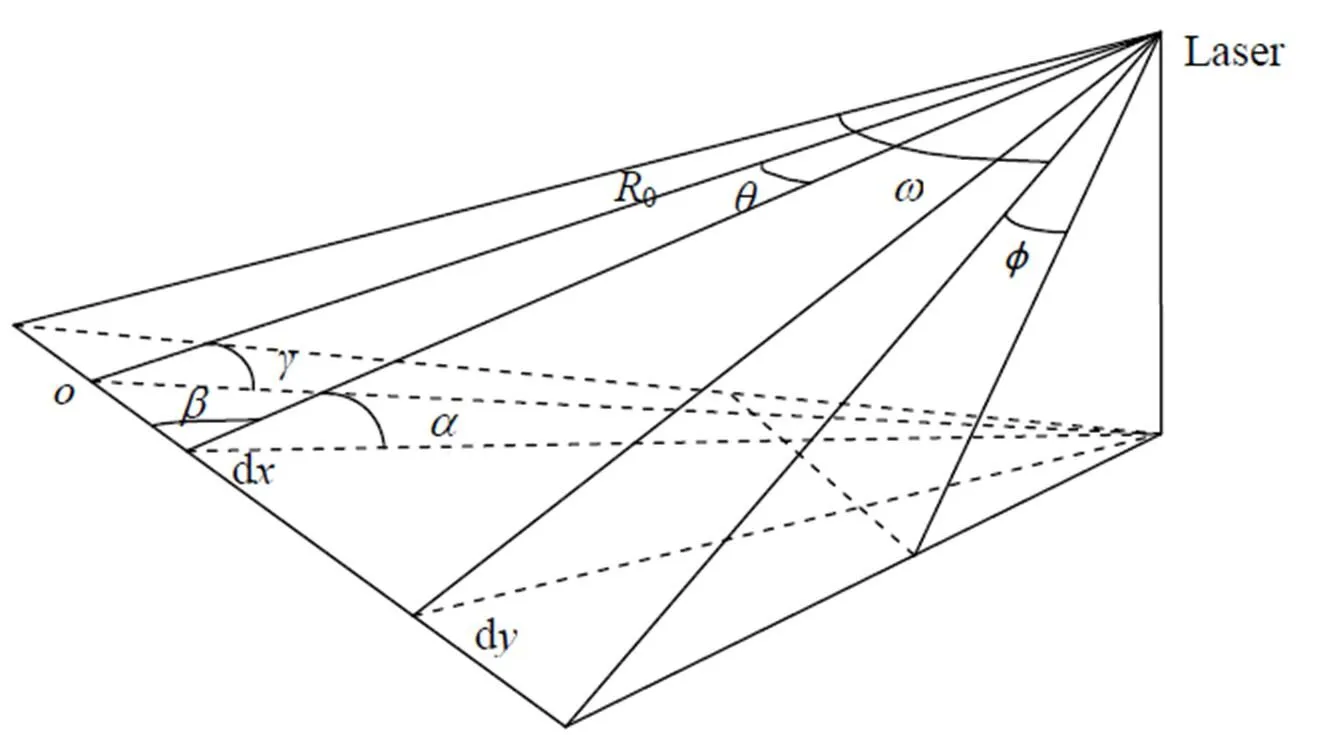
图1 线阵推扫激光3D 成像雷达大视场模型
图中,为雷达的横向视场角,为激光光束的纵向发散角,为激光扇面相对于地面的倾斜角,为系统到视场中心点的距离。因此,对视场范围内的地表区域在横向和纵向两个方向上进行二重积分并整理,即可得到大视场条件下的线阵激光3D成像雷达方程,如式(2)所示。其中:,,为光学系统单程透过率。

1.2 线阵推扫激光3D成像雷达
激光3D成像雷达是机载飞行平台上并行的发射扇形激光束,激光束在待扫目标表面照亮一条狭窄的条带状区域,激光的回波信号被阵列激光器(APD)[8]接收,从而得到目标物各个像点的灰度值和高程信息。激光3D成像雷达[9]的工作原理如图2(a)所示,其一维线性扫描通过虚拟线阵激光装置的结构完成,另一个维度的线性推扫由飞机的飞行完成如图2(b)所示。
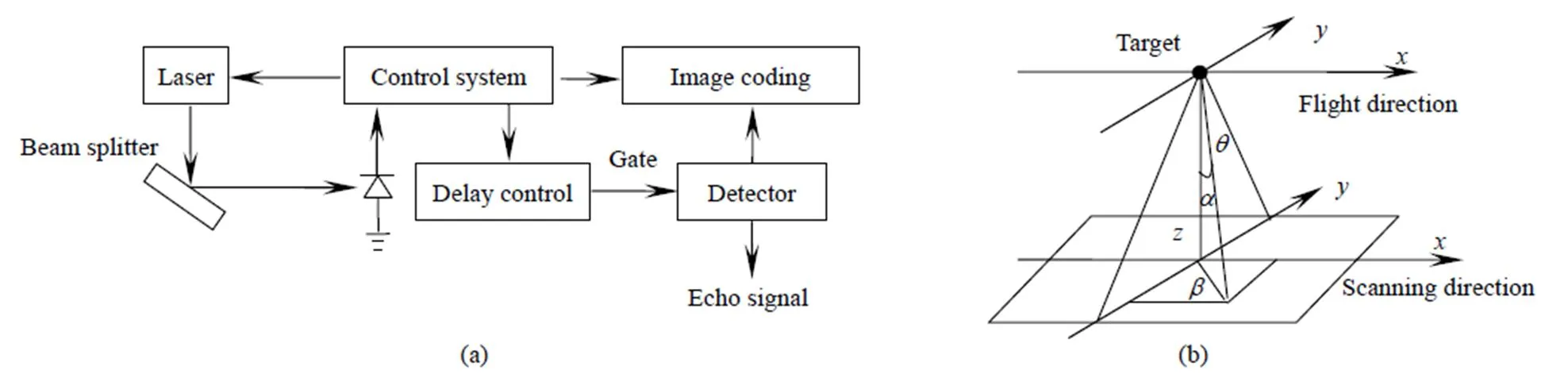
图2 激光3D 成像雷达原理及线阵推扫示意图
2 光束整形技术
光束整形技术是指利用特殊的光学系统实现激光光束的能量在时间或空间按照一定的规律分布的技术手段。现阶段光束整形的方法很多,整形的实际效果有很大不同,常用的光束整形方法有光栅拦截法、微透镜阵列法、衍射光学元件法、非球面镜法[10]、长焦深元件法以及轴锥镜偏离优化法等。这里重点分析轴锥镜偏离优化的整形方案和实验结果,对比光栅拦截法、微透镜阵列法及轴锥镜优化前的光束整形方法,得出轴锥镜偏离优化后的窄带激光光束两头能量较强,中间能量稍微弱,边缘能量衰减速度较快,能够满足大视场线阵推扫激光雷三维成像达技术要求的U型窄带状激光束。
2.1 光阑拦截光束整形技术分析
光阑拦截光束整形技术是利用光阑将光束边缘部分截挡掉,只保留中间能量集中且相对较均匀的光束,光束的能量在空间上是类高斯分布的,最初是用来获得平顶光束的整形方法。其拦截原理如图3所示,阴影部分为拦截掉的部分,这种方法设计简单,但是损失掉了大部分能量,对于远距离探测要求的激光雷达远远达不到能量需求。
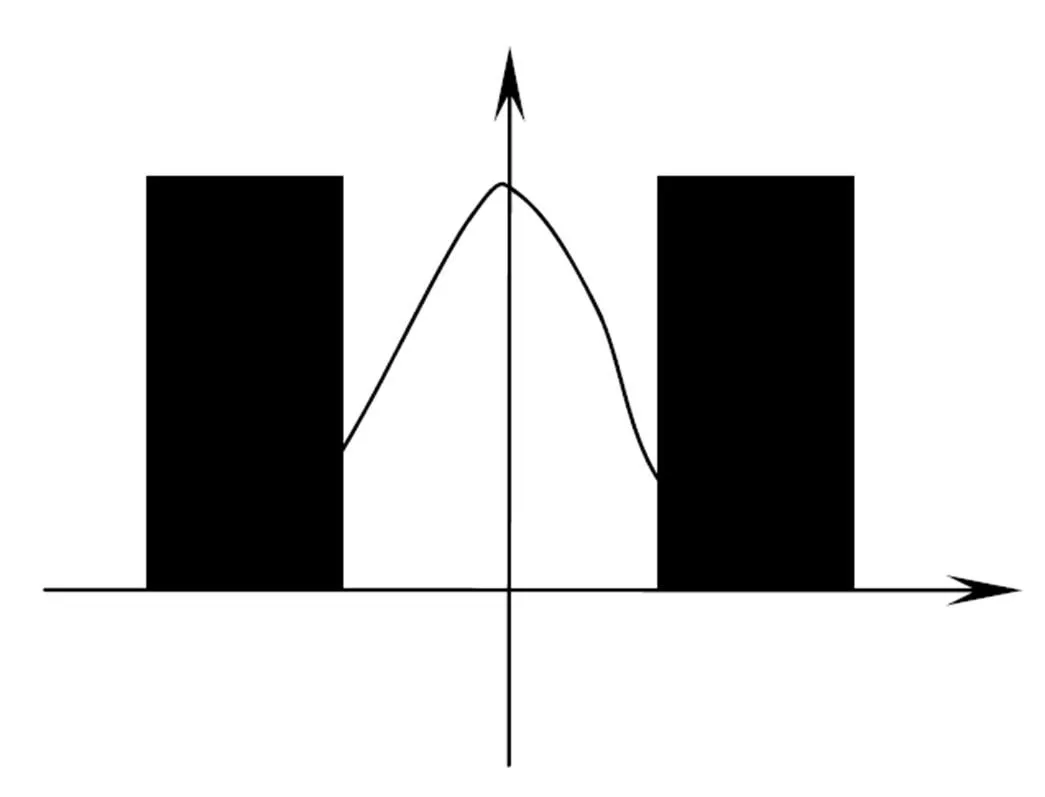
图3 高斯激光束光阑拦截原理图
2.2 微透镜阵列光束整形技术分析
微透镜阵列光束整形技术是利用微透镜阵列将入射光束分割成若干束尺寸相等的细光束,激光束经过前微透镜阵列与后微透镜阵列,然后通过聚焦透镜FL将光束聚焦在焦平面FP上,最终形成宽度为能量均匀分布的光斑,其原理图如图4。其中是入射光束直径,是前后微透镜的焦距,是聚焦透镜的焦距。

图4 微透镜阵列光束整形技术原理图
微透镜阵列光束整形技术通过对激光束分割和叠加实现光束能量重新分布,对入射光的能量分布要求不高,适合对光束能量空间分布不规则、相干性能差的激光光源的整形,但是光束整形后的激光束尺寸比原来的激光束小很多,能量的分布也随着焦平面FP变化,这种整形方案并不适合线阵推扫激光雷三维成像雷达的光束要求。
2.3 轴锥镜光束整形技术分析
轴锥镜光束整形技术是由轴锥镜的传输特性决定的,其传输示意图如图5所示。图中角决定了0光束的径向尺寸,圆锥镜的半径决定了0光束的轴向范围,对于具有较小底角的圆锥镜,根据几何光学理论可知,其中为圆锥镜材料的折射率,因此无衍射轴向最大距离为

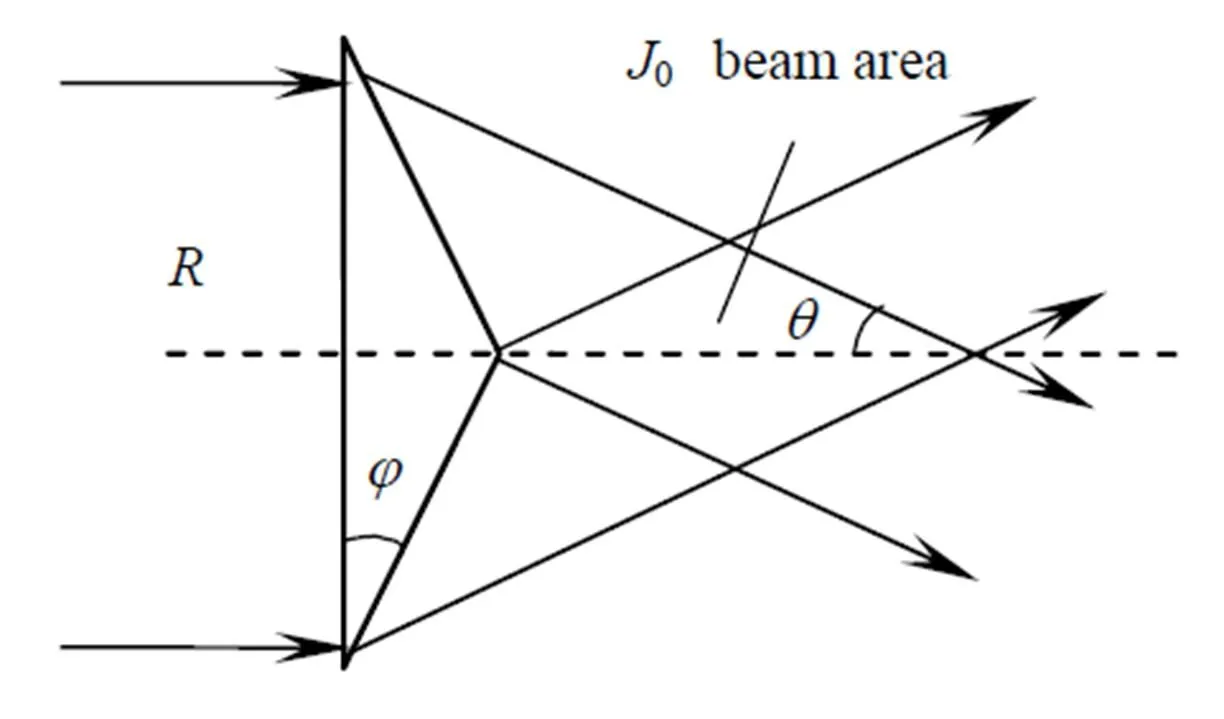
图5 圆锥镜光束传输示意图
在轴锥镜像距内形成径向能量近似服从零阶贝塞尔函数分布,中心处光斑直径基本不变的0光束(无衍射光束)。
本文的光束整形技术充分利用轴锥镜的传输特性采用双凸轴锥镜光学结构和柱面镜光束带状整形光学结构联合使用的光学系统,通过将高斯光束中心偏离双凸轴锥镜光轴中心一定距离实现光学系统的优化,最终得到了U型窄带状激光束。双凸轴锥镜光学结构和柱面镜光束带状整形光学结构的光路示意图分别如图6(a)(b)所示。

图6 双凸轴锥镜和柱面镜光束带状整形光路示意图
其中图6(a)中0为光束半径,表示轴锥镜半径,为两轴锥镜底面之间的距离,与环形光外径的关系为,但对于较小的轴锥镜根据几何光学理论可得,即将带入可得,环形光内径。根据上述原理本文通过仿真和实践获取0=12 mm,=15 mm,,160 mm的双凸轴锥镜光最为合适。
这里假设入射激光束为高斯光束,光束中心光强为单位1,可知光强分布服从:
如图6(b)在环形光束的径向平面内建立笛卡尔坐标系,光束内任意一点距离光轴的距离并将其带入式(4)可得:
实现方式:在施工开始前或深化设计过程中利用BIM技术的可视化及可协调特性对各个专业(建筑、结构、给排水、机电、消防等)的设计进行空间协调,检查各个专业管道之间的碰撞以及管道与结构的碰撞,避免施工中管道发生碰撞和拆除重新安装的问题(见图15、图16)。

其中:。
当时可得:

其中:。这里通过仿真工具对式(6)进行数值积分计算得到了分别为0.2、0.3、0.4和0.5时窄带光束的能量分布如图7所示,实线为大视场线阵推扫激光三维成像雷达能量需求空间分布曲线归一化结果。
通过仿真发现为0.2和0.3时曲线中间部分能量低于紫色曲线,本文通过高斯光束中心偏离圆锥镜光轴中心一定距离将边缘部分的能量转移到中间部分,达到了优化激光束的能量分布。
设高斯光束中心偏离光轴距离为,则高斯光束用笛卡尔坐标系表示为:
将式(8)转换为极坐标表示为

高斯光束经过轴锥镜整形后得到环形光束:


再利用仿真工具对式(11)进行数值积分,这里根据图7的仿真结果选取了时不同的进行仿真,结果如图8所示。
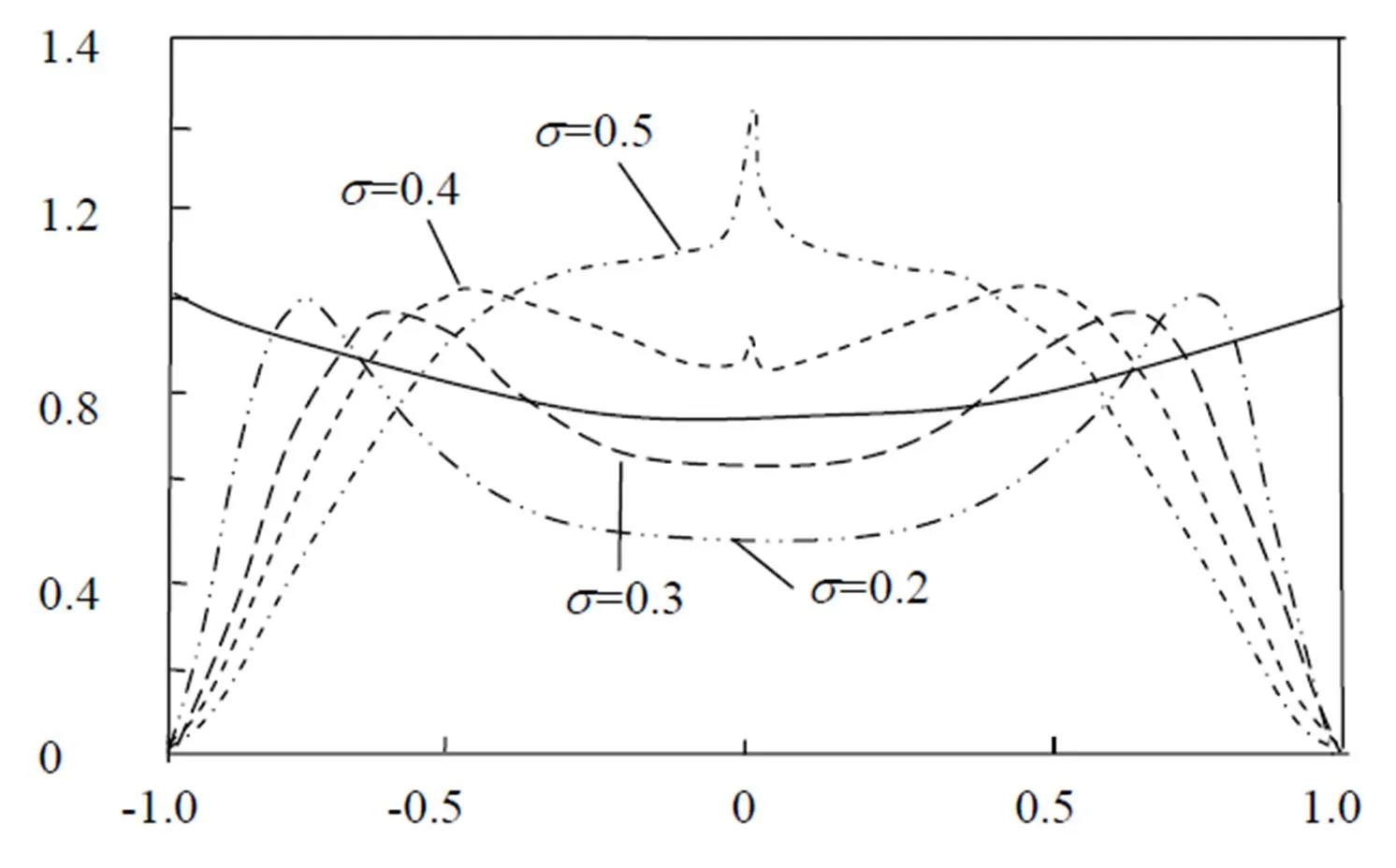
图7 窄带光束能量分布
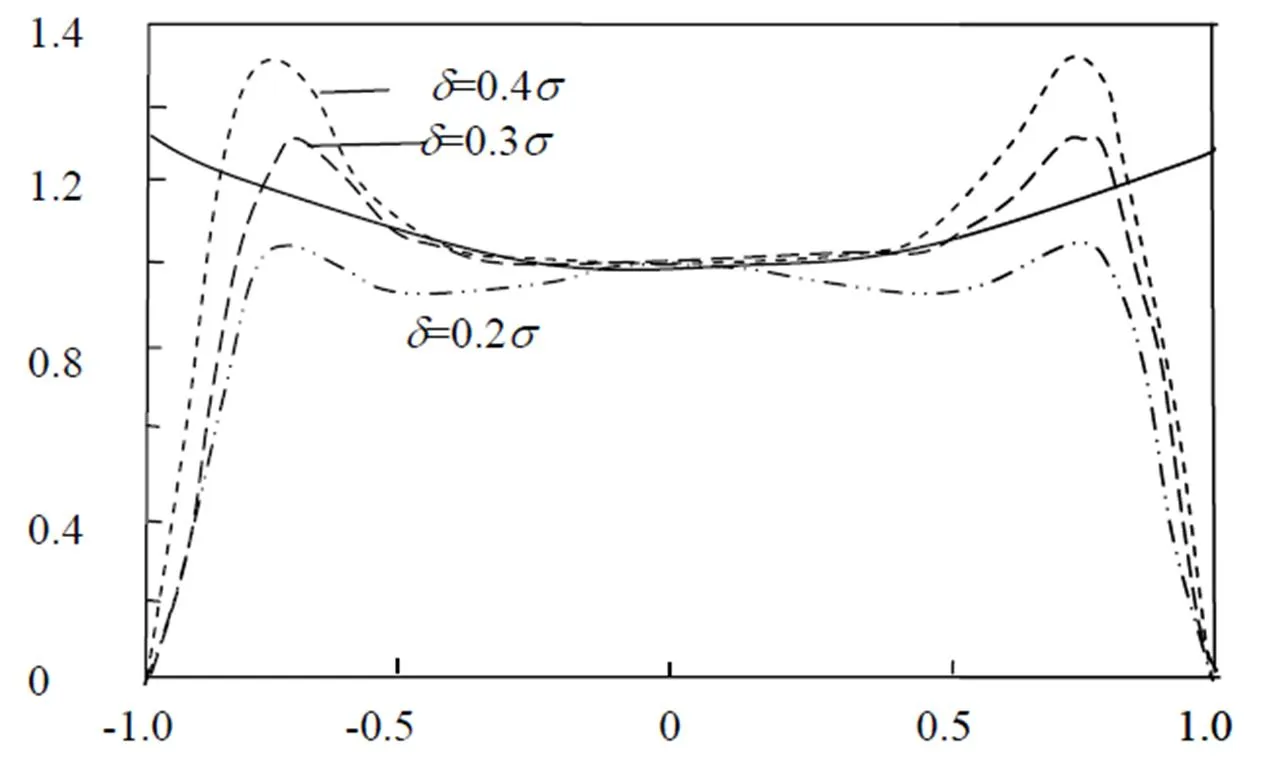
图8 优化后的窄带光束能量分布
3 实验结果分析
根据上述仿真结果,实际实验了轴锥镜光束整形方案和优化后轴锥镜光束整形方案,得到了采用轴锥镜光束整形方案(经过双凸轴锥镜光学结构和柱面镜光束带状整形光学结构联合使用的光学系统)的实际激光窄带光束和该窄带所对应的窄带光束空间能量分布,如图9(a)、(b)所示;采用优化后轴锥镜光束整形方案的实际激光窄带光束和窄带光束空间能量分布如图9(c)、(d)所示。

图9 两种方案的实际实验结果对比图
通过上述实际试验结果的对比可以明显看出优化后的轴锥镜光束整形方案两头光强较强,中间稍微弱一些,且在边缘衰减速度较快的“U”型窄带状激光束,满足了大视场线阵推扫激光三维成像雷达技术要求。
4 结 论
针对大视场线阵推扫激光3D成像雷达对出射激光能量分布的需求,文章分析了几种光束整形技术方案,提出了优化轴锥镜光束整形方案并对这种方案进行理论分析、仿真和实际实验,结果表明,优化轴锥镜光束整形方案能够获得满足大视场线阵推扫激光3D成像雷达的两头光强较强,中间稍微弱一些,且在边缘衰减速度较快的“U”型窄带状激光束。
[1] 赵严峰. 轴锥镜对高斯光束变换特性的研究 [J]. 河南大学学报,2009,39(3):247-250.
ZHAO Yanfeng. Transformation Properties of Gauss Beams Through Axicon [J]. Journal of Henan University,2009,39(3):247-250.
[2] 李思宁,刘金波,李慧子,等. 大视场情况下激光雷达距离方程的修正[J]. 中国激光,2006,33(3):108-110.
LI Sining,LU Jinbo,LI Huizi,. Modification of Lidar Equation in Large Field of View [J]. Chinese Journal of Laser,2006,33(3):108-110.
[3] 孙志慧,邓甲昊,闫小伟. 线阵推扫式激光成像引信探测技术 [J]. 光学工程,2009,36(3):16-21.
SUN Zhihui,DENG Jiahao,YAN Xiaowei. Linear Array Push-broom Method in Laser Imaging Fuze Detection Technology [J]. Opto-Electronic Engineering,2009,36(3):16-21.
[4] 陈凯. 高斯光束整形为平顶光束系统的研究与设计 [D]. 北京:北京工业大学,2011:1-59.
CHEN Kai. The Research And Design Of The System That Converting A Gaussian To A Flattop Beam [D]. Beijing:Beijing University of Technology,2011:1-59.
[5] 唐晓燕,高昆,倪国强. 激光3D成像系统主被动探测技术的研究进展 [J]. 激光与红外,2013,43(9):986-989.
TANG Xiaoyan,GAO Kun,NI Guoqiang. Development of active/passive detection technology in 3D imaging lidar system [J]. Laser & Infrared,2013,43(9):986-989.
[6] 张健,张雷,曾飞,等. 机载激光3D探测成像系统的发展现状 [J]. 中国光学,2011,4(3):213-232.
ZHANG Jian,ZHANG Lei,ZENG Fei,. Development status of airborne 3D imaging lidar systems [J]. Chinese Optics,2011,4(3):213-232.
[7] 黎荆梅,周梅,李传荣. 阵列推扫式机载激光雷达三维点云解算方法研究 [J]. 遥感技术与应用,2013,28(26):1033-1038.
LI Jingmei,ZHOU Mei,LI Chuanrong. Research on Points Position Cloud Caculation Method of Airborne Linear Array Push-broom LiDAR [J]. Remote Sensing Technology and Application,2013,28(26):1033-1038.
[8] 韩小纯,王元庆. 盖革模式APD阵列在激光雷达技术中应用 [J]. 激光与红外,2013,43(9):982-985.
HAN Xiaochun,WANG Yuanqing. Application of Geiger-mode APD array in laser radar [J].Laser & Infrared,2013,43(9):982-985.
[9] SU Jinshan,WANG Yuanqing,LIANG Dongdong. Long range detection of line-array multi-pulsed coding lidar by combining the Accumulation coherence and Subpixel-energy detection method [J]. Optics Express(S1094-4087),2015,23(12):15174-15185.
[10] 范增明,李卓,钱立勋. 非球面透镜组激光光束整形系统[J]. 红外与激光工程,2012,41(2):353-357.
FAN Zengming,LI Zhuo,QIAN Lixun. Aspherical lens laser beam shaping system [J]. Infrared and Laser Engineering,2012,41(2):353-357.
本期组稿:杨淇名
责任编辑:谢小平
英文编辑:庞 洪
Lined Push-room Laser 3D Imaging Radar with Large Field Beam Shaping
YANG Xingyu1,SU Jinshan1,2,WANG Yuanqing2,ZHANG Bingqing2,SHEN Lue2
( 1. Electronics and Information Engineering College, Yili Normal University, Yining 835000, Xinjiang Uygur Autonomous Region, China; 2. School of Electronics Science and Engineering, Nanjing University, Nanjing 210046, China )
Energy is concentrated in the middle part of the beam for the traditional narrowband laser beam shaping. This energy distribution approximates a Gaussian distribution which can not meet the requirements of large field line Pushbroom 3D imaging laser radar technology. A novel beam shaping technology is proposed to solve the problem of Pushbroom lidar which needs a narrow strip of the laser beam. According to the optical properties of cone mirror, we use Biaxial Axicon to change the spatial energy distribution of the laser beam, and then energy distribution of the laser beam are shaped "U" through the cylindrical lens. Experimental results show that the "U" shaped narrowband of the laser beam can meet the requirements of large field of linear array push-broom imaging 3D laser radar.
push-room laser radar; beam shaping; 3D imaging; narrow shaped laser beam
TN958.98
A
10.3969/j.issn.1003-501X.2016.04.015
2015-07-02;
2015-11-11
伊犁师范学院重点项目(2011YNZD011);国家科技重大专项(AHJ2011Z001)基金资助项目
杨兴雨(1988-),男(汉族),河北唐山人。硕士,主要研究工作是图像处理,信号增强。E-mail:yxynju@126.com。
猜你喜欢
中国光学(2021年6期)2021-11-25 07:48:32
山东冶金(2019年1期)2019-03-30 01:34:54
中国医疗设备(2019年1期)2019-01-15 12:10:54
科技风(2018年19期)2018-05-14 05:13:39
科技创新与应用(2017年11期)2017-04-27 20:47:28
电子制作(2017年19期)2017-02-02 07:08:38
激光与红外(2015年10期)2015-03-23 06:07:18
百科知识(2014年11期)2014-06-10 05:47:57
中学理科园地(2014年1期)2014-04-29 00:44:03
电视技术(2014年19期)2014-03-11 15:38:13
