
线扫描运动控制平台设计
2016-10-13 10:42丁伟秦怀宇
电子设计工程 2016年10期
丁伟,秦怀宇
(江苏科技大学江苏张家港215600)
线扫描运动控制平台设计
丁伟,秦怀宇
(江苏科技大学江苏张家港215600)
基于单片机微控制器,利用数字控制系统的直流电机脉宽调制技术,实现了高精度、可非线性调速的线扫描运动控制平台,成功为后续的线扫描系统提供机械模块。该设计可通过按键实现控制直流电机的启动、停止、正反向控制,分别用5个等级的占空比来对应表征五级速度,实现了直流电机的加减速,且采用LCD实现数据显示。
线扫描;单片机;直流电机;脉冲宽度调制
机器视觉检测技术[1]是近年来发展起来的一种新兴质量检测技术,主要用计算机来模拟人的视觉功能,将信息从客观事物的图像中提取出来进行处理并加以理解,最终用于实际的检测、测量和控制。随着产品的尺寸的加大,在提高产能和检测效率的前提下,传统的面阵扫描[2]已经无法满足这些要求的问题。由此,线扫描检测技术[3]应运而生。
线扫描检测技术是机器视觉检测技术中发展较快、前景较广的一个分支。线扫描运动控制系统[4]是专门为线扫描相机配备的运动控制平台,每一台线扫描相机能够取得理想中的图像效果都离不开运动控制平台的紧密配合。在一定程度上,运动控制平台设计的好坏直接决定了线扫描检测系统是否能够完成所需的检测要求[5]。
目前,在实际应用中,运动控制平台的成本基本高于线扫描相机系统的成本,都具有高精度、高速、高效率的特点,设备部件的选用要求严格[6]。文中重点研究一种易实现、造价低、要求稍低的运动平台的控制方法,以达到满足实验模拟要求的目的。文中主要研究基于数字控制系统的直流电机脉宽调制技术、采用单片机微控制器利用直流电机实现高精度、可非线性调速的线扫描运动控制平台。该设计可通过按键实现控制直流电机的启动、停止、正反向和加减速控制,且采用LCD实现数据显示。
1 直流电机脉宽调制技术
脉冲宽度调制[7]是利用微处理器的数字输出来对模拟电路进行控制的一种非常有效的技术。PWM调速作为一项新概念的调速技术,目前不论是在同步电机还是异步电机的调速方面,PWM调速都是众多调速方式的佼佼者。PWM调速克服了变极调速是有极调速,对于不需平滑调速的场合就无法使用的缺点,也克服了变转差调速效率低的缺点,与交_交变频电路的变频过程比较,多了一个使PWM电路更具灵活性的直流转换过程[8]。
总的来说PWM变频调速技术调速灵活,在一定范围内可实现恒力矩输出,调速的范围宽,是一种相当适合工程应用使用的调速方式,而且其本身的技术也在不断的革新中,随着PWM技术的不断改进,它的应用的范围也将不断的扩大。
2 线扫描运动控制平台设计
2.1设计指标
本文主要通过STC12C5A60S2单片机产生脉宽可调的脉冲信号并输入到L298N驱动芯片来控制直流电机的的加速、减速、正转、反转工作。主要包含输入、控制和速度显示三大模块。其中,输入模块是利用独立式键盘来实现对直流电机的加速、减速、正转、反转和启动、停止控制;控制模块:主要由STC12C5A60S2单片机和部分外部扩展电路组成。直流电机PWM控制实现部分主要由控制电路、电机和L298N驱动芯片组成;速度显示模块是通过LCD液晶显示,实现对直流电机转速等级、占空比及停止等信息的实时显示。
2.2设计方案
考虑到既要系统操作方便,又要通过电机控制的转速显示实时性强,故采用以单片机STC12C5A60S2为中心,通过D/A转换器,将单片机的数字量转换为模拟量输入给电机,从而起到控制电机的转速。在单片机控制部分,通过按键直接从程序中调出不同的速度值,输入到数码管模块和D/A转换模块,以实现电机的速度调节。其系统框图如图1所示。

图1 系统框图
2.3系统模块设计
系统模块包含直流电机模块、LCD显示模块、键盘模块3部分设计。
1)直流电机模块
直流电机模块的程序设计主要是使能及占空比的时序设计。在给电机一个使能信号的同时,相应的按键按下,电机启动。电机将会按照该按键输入的占空比命令转动,这个转动的过程其实由延时函数完成,例如当输入占空比为40%时即电机转动40ms,停止60ms,但是这个过程是很快的,通过人眼是无法辨别的,当输入占空比有明显变化事才能容易识别,故本设计将占空比分为了5个等级,每等级相差20%。
2)LCD显示模块
开始时判断LCD是否忙碌即正在读写其他数据,若不忙,则通过相应控制端的高低电平设置进行数据的读写。首先打开使能端,等数据完成传输后关闭使能端,因数据传输需要一定的时间,故需要一定的延时,但是为了方便接受下一次的数据传输,使能端在经过延时后需要再次打开。
3)键盘模块
在整个程序设计中键盘扫描会一直进行,即每次按键按下后都会有及时的响应。当检测到有按键按下后需要一个10ms的延时,目的是软件消抖。调用相应的程序使得电机做出相应的动作并让LCD做出与动作相符合的显示。全部完成后回到主程序继续保持按键扫描。
3 线扫描运动控制平台硬件实现
本设计采用的是单片机控制PWM调速系统。系统控制对象是JGA25_370有刷直流电动机,主要技术指标如表1所示。

表1 电机参数
硬件系统设计分别包含单片机控制模块、电源模块、键盘输入模块、LCD显示模块。
3.1单片机控制模块
本设计使用的单片机型号为STC12C5A60S2,其计是按照最小系统的模式设计的。因该单片机的工作电压为5V,考虑到直流电机的供电需及系统的简易性,在硬件设计上集成了电压转换电路,将外部24V电压转为5V给单片机供电。另外,所有的接地引脚全部连接到一起,增强系统的稳定性。其硬件电路如图2所示。
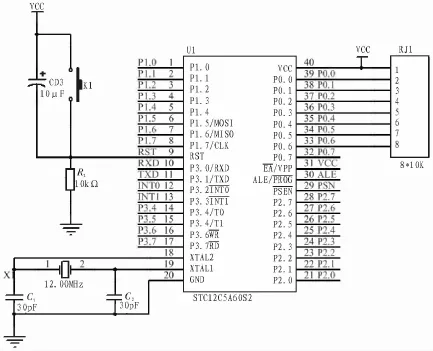
图2 单片机控制模块
3.2电源模块设计
在本设计中,由于直流电机调速系统中逻辑元件需要+5 V直流电源,而小型直流电动机的额定电压为24 V,故本设计中需要两个直流电源,故本模块设计选用芯片L7805CV,实现24 V电压到5 V直流电的转换给逻辑器件供电。其硬件电路如图3所示。
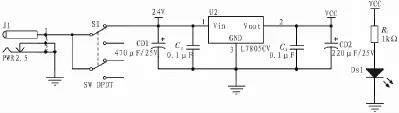
图3 电源模块
3.3键盘模块设计
本设计中选择的是独立按键输入设备组成键盘模块,采用的是查询工作法,其硬件电路如图4所示。其中,S2、S3、S4 3个按键可以分别控制直流电机的加速、减速、停止,每个按键配一个上拉电阻,在实现功能的同时还可以起到保护电路的作用。

图4 键盘模块
3.4LCD显示模块设计
本设计中选用LCD1602液晶显示器,与单片机相应的IO口连接起来完成功能需求,其硬件电路如图5所示。

图5 LCD显示模块
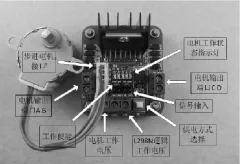
图6 电机驱动模块实物图
4 系统调试
4.1电机驱动
选用L298N的电机驱动模块进行开发,该模块可以实现2路直流电机和1路步进电机的驱动控制。电机驱动模块的实物图如图6所示。
该模块设置了使能信号EN,仅当使能信号置1时电机才能工作。为实现电机转动,还需将模块上的INA和INB与单片机模块的IO口连接,INA和INB的高低电平决定了电机的正反转、转动、停止等功能。将OUT1、OUT2与直流电机的两根线相连,即可实现电机驱动。
4.2系统调试
本系统设计的调试主要由软件编译和软硬件联调完成。其中,软件部分的调试在Kei1 uVision3编程软件上实现,。软硬件联调即将软件程序下载到硬件电路的控制核心,对硬件电路进行控制,以实现系统设计的功能。当系统启动初始化或复位后,电机启动但是不会转动,LCD显示为None!!!表明系统已经启动但是还没有收到控制信号,如图7所示。

图7 系统初始化及复位后显示
系统启动后,对按键进行操作可以实现电机加减速,本系统将占空比的设计分成了5个等级,分别为20%、40%、60%、80%、100%。当占空比为20%,可以到达速度等级1,如图8所示。当占空比为100%时,可以达到速度等级5。电机转动过程中若对电机进行急停控制,按停止键后电机制动,LCD显示“STOP!!!”。若继续控制电机转动,可以直接按加速键使得电机加速转动。

图8 占空比为20%
5 结论
本文利用STC12C5A60S2单片机产生脉宽可调的脉冲信号,并输入到L298N驱动芯片来控制直流电机,并通过按键实现控制直流电机的启动、停止、正反向和加减速控制,且采用LCD实现对直流电机转速等级、占空比及停止等信息的实时显示。实现了一种易实现、造价低、要求稍低的运动平台的控制方法,可以达到满足简单实验要求的目的,成功的为后续的线扫描系统提供机械模块。
[1]Carsten Steger Markus UIrich著.机器视觉算法与应用[M].北京:清华大学出版社,2008:46_61.
[2]杨育周.基于数字TDI技术的面阵扫描信息获取方式研究[D].北京:中国科学院研究生院,2014.
[3]张东波,彭英辉,刘霞,等.基于线扫描分析的点状目标检测和分割[J].光电子·激光,2014,25(8):1586_1591.
[4]王海霞,颜桂定,李宝辉,等.直线电机运动控制系统的软件设计与实现[J].电子测量与仪器学报,2013,27(3):264_269.
[5]马莉波,张甲,李星.扫描检测平台效用评估[J].厦门大学学报:自然科学版,2007,46(z2):79_83.
[6]付毅宾,袁自钧,吴先友,等.基于PLC_839+的二维步进运动平台控制系统设计[J].机床与液压,2011,39(4):92_94.
[7]郝建卫.基于FPGA的脉冲宽度调制信号发生器[J].计算机工程,2013,39(2):260_264,269.
[8]孟海岗,常美,孙剑.基于8051单片机控制的直流电机PWM调速系统设计[J].伺服控制,2013(2):40_41.
Deslgn of llne scannlng motlon control Platform
DING Wei,QIN Huai_yu
(Jiangsu University of Science and Technology,Zhangjiagang 215600,China)
The theory and method to rea1ize 1ine scanning motion contro1 p1atform which is high accuracy and non1inear contro1 speed regu1ation,using pu1se width modu1ation method,based on sing1e_chip micro contro11er to DC motor,to provide mechanica1 modu1e for 1ine scan system.The design uses buttons can rea1ize contro1 DC motor to start,stop,forward,reverse contro1,using five 1evers of duty ratios corresponding characterization of five speed,rea1ized the dece1eration of the DC motor and LCD disp1ay.
1ine scanjsing1e chip microcomputerjDC motorjPWM
TN06
A
1674_6236(2016)10_0061_03
2015_06_02稿件编号:201506020
江苏科技大学校区青年教师科研项目(112110146)
丁伟(1985—),女,江苏苏州人,硕士,讲师。研究方向:数字信号处理,单片机。
猜你喜欢
大电机技术(2022年5期)2022-11-17
汽车实用技术(2022年12期)2022-07-05
电子制作(2021年3期)2021-06-16
电子制作(2019年13期)2020-01-14
电子制作(2019年15期)2019-08-27
电子制作(2019年11期)2019-07-04
电子制作(2019年9期)2019-05-30
数码世界(2018年7期)2018-08-11
电子制作(2017年1期)2017-05-17
电子制作(2016年1期)2016-11-07
