显微视觉系统大范围自动聚焦及控制
2016-10-13 12:52李惠光袁仁辉沙晓鹏
光电工程 2016年9期
李惠光,李 敏,袁仁辉,沙晓鹏,邵 暖
显微视觉系统大范围自动聚焦及控制
李惠光1,李 敏1,袁仁辉1,沙晓鹏2,邵 暖3
( 1. 燕山大学电气工程学院,河北秦皇岛 066004;2. 东北大学秦皇岛分校控制工程学院,河北秦皇岛 066004;3. 河北环境工程学院环境工程系,河北秦皇岛 066004 )
针对显微视觉系统中大范围聚焦问题,本文提出新的聚焦搜索策略。该策略将改进的SUSAN算子和小波变换算子组合提出新的聚焦评价函数,并根据评价函数单峰性以及峰值两侧变化陡峭的特点将聚焦曲线分为实现快速搜索的平缓区和高斯拟合的陡峭区,采用自行研发的显微视觉系统对搜索策略进行验证,按照拟合结果驱动电机直接到达焦平面。实验结果表明,新的聚焦搜索策略在实时性和准确性上具有更好的效果。
显微视觉;大范围聚焦;SUSAN算子;小波变换;高斯拟合
0 引 言
自动聚焦是显微操作系统中的一项关键技术。自动聚焦技术分为主动式聚焦和被动式聚焦[1]。由于被动式聚焦不需要额外的测距设备,显微视觉系统体积小、功耗低,因此在实际中被广泛应用[2-4]。文献[5]对已有的聚焦评价函数进行了分析,但没有考虑噪声影响,导致函数出现多峰现象。针对显微视觉系统中景深非常小而操作系统工作范围相对较大的情况,文献[6]提出大范围聚焦概念。
本文从设计聚焦评价函数入手,改进了时域中的SUSAN算子以及频域中的离散小波变换算子,并将组合算子作为新的聚焦评价函数。通过分析大范围聚焦函数的曲线形态,将聚焦过程划分为平缓区和陡峭区两个阶段,在平缓区进行快速搜索,在陡峭区范围内对曲线进行高斯拟合以获得最佳聚焦平面位置。最后,通过自行研发的显微视觉平台对所提聚焦方案进行验证,实验结果证明了该方案的有效性。
1 聚焦评价函数
1.1 自适应SUSAN算子
SUSAN算法将采样模板em在目标区域内移动,模板与目标区域的相对位置会出现图1所示六种情况。将模板中的每个像素分别与中心点的像素值进行比较,相同或者相似的像素个数构成了最小核值相似区域(USAN)。当模板处于目标边缘位置时,模板中心像素和其它位置的像素值会有差异,将该差异大于阈值的像素个数作为聚焦评价函数。定义中心像素与模板其他位置像素的灰度差异式:
式中:为比例系数,取值范围为0.08~0.12。
在不同光照强度下采集目标物体的图像,使用不同阈值的SUSAN算法和改进后SUSAN算法分别计算聚焦评价值,绘制聚焦评价曲线如图2所示。从图2的纵向比较中可以看出,传统的SUSAN算法阈值的选取对聚焦曲线的影响比较大,改进的SUSAN算法不受固定阈值的限制,根据聚焦物体本身的对比度调节阈值。从横向比较中可以看出,传统的SUSAN算法受光照强度影响较大,在光照较强的情况下,SUSAN算法单峰性好,随着光照强度的减弱,单峰性减弱,甚至出现几乎没有波动的情况;而改进SUSAN算法无论在何种光照情况下,单峰性都比较好。
1.2 离散小波变换
基于提升算法的小波变换分为分解、预测和更新三个阶段[7]。首先,根据输入信号的奇偶性,将信号分为偶数部分和奇数部分;然后,用偶数部分的预测值来预测奇数序列;最后,构造算子,再用来更新偶数序列。本文使用5/3提升小波变换,变换式:
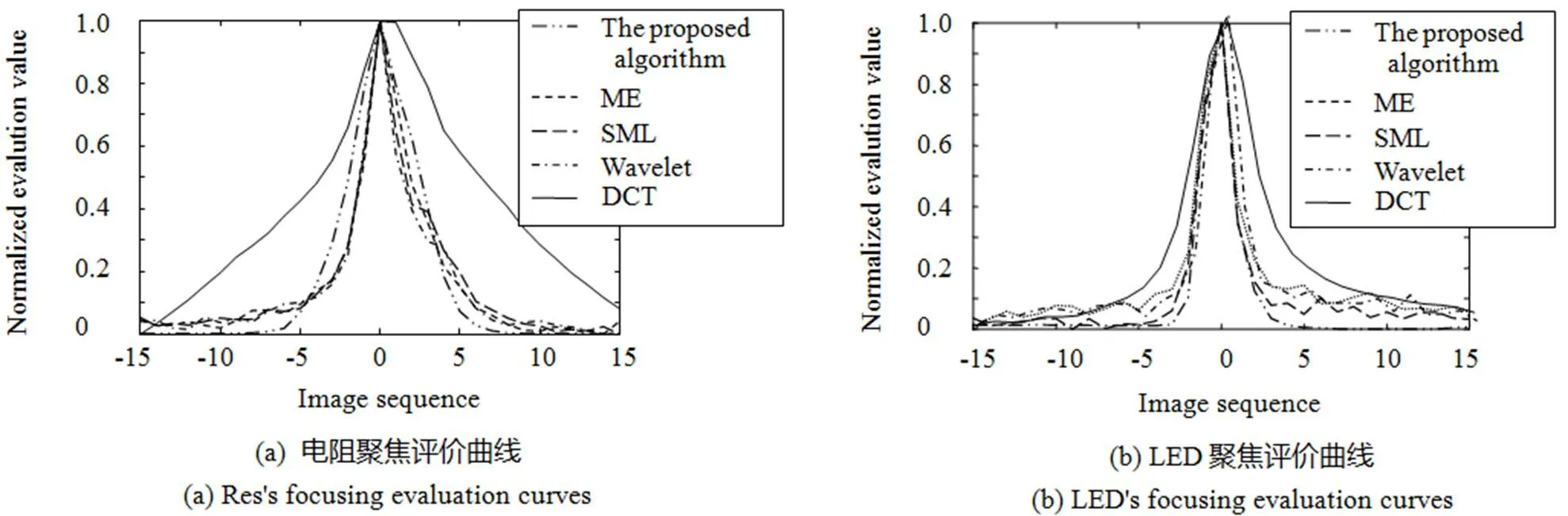
图3 不同目标评价函数
1.3 组合算子
在时域中,自适应SUSAN算子对于光照强度的变化不是很敏感;在频域中,离散小波变换算子的高频分量包含更多的细节信息。因此结合上述两种算子的特点,定义新的聚焦评价函数:
为了验证聚焦函数的有效性,分别以内容丰富的电阻、内容稀疏的LED碎片为目标物体绘制聚焦曲线。以显微镜的焦平面为原点,在焦平面的左右两侧各采集15幅图像,相邻图像之间的步长设置为0.4 mm。将新提出的ME[8]函数、SML[9]函数、Wavelet[10]函数、DCT[11]函数以及本文所提评价函数绘制聚焦评价曲线如图3所示。本文采用黄金分割法确定比例因子、,分别取值为0.62,0.38。图3(a)和图3(b)中纵坐标表示归一化的聚焦评价值,横坐标表示获取的图像序列。
由图3可以看出,新的聚焦评价函数在内容丰富与稀疏的目标物体上比其他聚焦函数更具适应性,同时在焦平面附近,新的聚焦曲线比较陡峭;而在远离焦平面的区域,本文所提评价函数绘制的曲线比较平缓,而其他曲线则存在明显波动。依据这一特性将聚焦曲线划分为平缓区和陡峭区两个部分,并在平缓区和陡峭区使用不同的搜索方式寻找极值。
2 搜索策略
2.1 平缓区搜索
由于聚焦的初始位置具有随机性,确定当前位置处于聚焦曲线的平缓区还是陡峭区是搜索的首要条件,因此在搜索过程中加入判决因子,具体搜索过程为:1) 设初始位置的评价值为,控制步进电机运动大步长,得到此时的评价值,记录步数C;2) 判断是否为局部极值点,定义判决因子;3) 设为极值因子,若,表示聚焦曲线无明显变化,当前处于平缓区,保持原方向不变继续搜索,若C大于30,则电机反向,返回初始位置并进入步骤1);4) 若,表示已离开平缓区进入陡峭区,驱动步进电机回到位置处;5) 若,则进入陡峭区,转入陡峭区搜索;6) 若,则反向驱动电机运动2步长,并返回步骤2)。
在搜索过程中,步长过大可能导致两次采样点分别落在两侧的平缓区,影响搜索结果,而步长过小则会影响搜索速度。因此,步长的大小在不影响搜索速度的前提下必须小于陡峭区的宽度,本文设置为0.6 mm。经过反复实验,极值因子设置为0.1,实验取得较好的效果。
2.2 陡峭区极值搜索
拟合程度的好坏使用误差平方和(SSE)、误差均方根(RMSE)和方程的决定系数(R-Square)进行评价。其中SSE和RMSE取值范围为0到1,结果越接近于0,说明数据拟合误差越小。R-Square取值范围也为0到1,该值越接近1表示曲线逼近程度越好。从评价指标来看,本文所提算法SSE和RMSE指标均最接近0,而R-Square指标最接近1,说明该算法逼近程度最好。
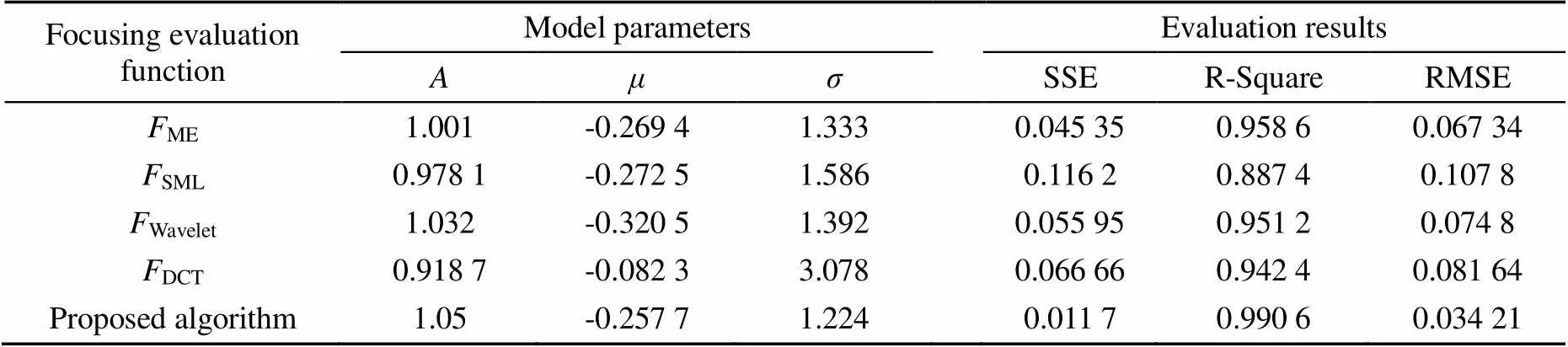
表1 聚焦评价曲线拟合分析
3 实 验
实验平台为四自由度显微视觉系统,实物如图4所示。本节使用的聚焦软件是在VS2010编程环境下,基于C语言编写,部分代码调用了OpenCV库函数完成,软件界面如图5所示。
为了验证本文所提算法的有效性,在显微镜的调节范围内随机选取聚焦起始点,采用ME函数、SML函数、Wavelet函数、DCT函数和本文所提聚焦评价函数按照该搜索策略分别进行聚焦实验20次。为了评价以上几种方案的聚焦效果,将获取的聚焦平面和最优聚焦平面之间的差值绝对值定义为,若小于0.15 mm则表示聚焦成功。将成功次数suc和成功率suc作为评价指标,同时计算不同聚焦评价函数下聚焦过程的平均耗时ave,实验结果如表2所示。

图4 自行研发的显微视觉系统
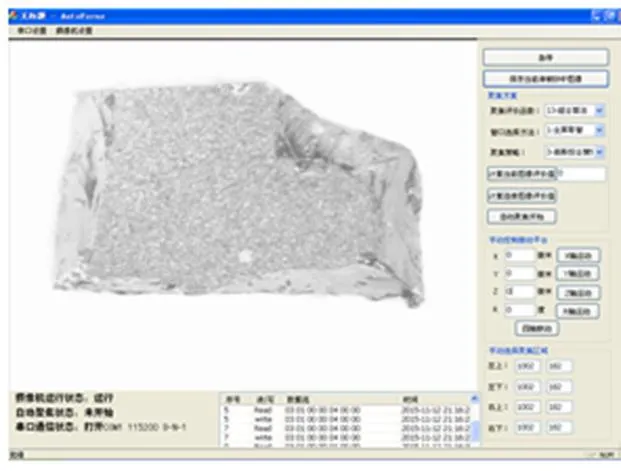
图5 软件界面
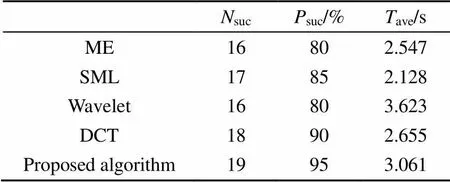
表2 评价结果
在大范围聚焦阶段,由于聚焦初始位置不同则聚焦过程不同,为了比较使用不同函数进行搜索的效率,计算成功聚焦所使用的平均时间,虽然本文所提算法与其他函数相比消耗的时间略有增加,但是以上20次聚焦实验中,本文所提算法达到95%的成功率,而使用其他聚焦函数的聚焦成功率达到80%以上,说明新的聚焦评价函数在聚焦搜索的平缓区能实现快速搜索,更能有效的将陡峭区的数据进行高斯拟合,进而获取聚焦平面。在陡峭区选取其中一组样本进行聚焦过程说明如图6所示。
4 结 论
对显微视觉系统大范围聚焦问题进行了研究。首先,设计了新的聚焦评价函数,提高了聚焦过程的稳定性和准确性。然后,根据大范围聚焦曲线的特点,将聚焦过程分为平缓区和陡峭区,在平缓区进行快速搜索,进入陡峭区以后则使用高斯拟合的方法,能更快的找到聚焦平面。通过比较证明了本文所提算法比其他的算法的拟合效果更好。最后,在实验部分,通过自行研发的聚焦实验平台验证了所提聚焦策略的有效性,并给出了一组聚焦过程图像。
参考文献:
[1] 李惠光,王帅,沙晓鹏,等. 显微视觉系统中自动聚焦技术的研究 [J]. 光电工程,2014,41(8):1-9.
LI Huiguang,WANG Shuai,SHA Xiaopeng,. Study of Auto Focusing Technique of Micro-vision System [J]. Opto-Electronic Engineering,2014,41(8):1-9.
[2] 沈飞,徐德,唐永建,等. 微操作/微装配中微力觉的测量与控制技术研究现状综述 [J]. 自动化学报,2014,40(5):785-797.
SHEN Fei,XU De,TANG Yongjian,. Review of Measuring and Control Technology of Microforce in Micromanipulation and Microassembly [J]. Acta Automatica Sinica,2014,40(5):785-797.
[3] XU Qingsong. Precision Position/Force Interaction Control of a Piezoelectric Multimorph Microgripper for Microassembly [J]. IEEE Transactions on Automation Science and Engineering(S1545-5955),2013,10(3):503-514.
[4] Komati B,Rabenorosoa K,Clevy C,. Automated Guiding Task of a Flexible Micropart Using a Two-Sensing-Finger Microgripper [J]. IEEE Transactions on Automation Science and Engineering(S1545-5955),2013,10(3):515-524.
[5] 韩瑞雨,王晋疆,聂凯,等. 不同对比度下自适应的自动调焦新算法 [J]. 光子学报,2012,41(2):222-227.
HAN Ruiyu,WANG Jinjiang,NIE Kai,. Adaptive Autofocus Technique Under Dufferent Contrast [J]. Acta Photonica Sinica,2012,41(2):222-227.
[6] 翟永平,周东翔,刘云辉. 极小景深条件下显微镜大范围聚焦算法 [J]. 光学学报,2012,32(4):0418001.
ZHAI Yongping,ZHOU Dongxiang,LIU Yunhui. Large Range Autofocusing Algorithm for Microscopy with Small Depth of field [J]. Acta Optica Sinica,2012,32(4):0418001.
[7] 周丽平,孙志峻,张泉. 显微视觉系统的自动聚焦及控制 [J]. 光学精密工程,2013,21(3):807-812.
ZHOU Liping,SUN Zhijun,ZHANG Quan. Auto-focusing and Control of Micro-vision System [J]. Optics and Precision Engineering,2013,21(3):807-812.
[8] XU Xin,ZHANG Xiaolong,FU Haidong,. Robust Passive Autofocus System for Mobile Phone Camera Applications [J]. Computers and Electrical Engineering,2014,40(4):1353-1362.
[9] ZHANG Sheng,ZHANG Hao,CHEN Bill,. On-Screen-Display (OSD) and SPI Interface on CMOS Image Sensor for Automobile Application [C]// Fifth International Conference on Computational Intelligence,Communication Systems and Networks,Madrid,Spain,Jun 5-7,2013:405-408.
[10] Naresh Marturi,Brahim Tamadazte,Sounkalo Dembele,. Visual Servoing-Based Approach for Efficient Autofocusing in Scanning Eletron Microscope [C]// IEEE/RSJ International Conference on Intelligent Robots and Systems,2013,40(6):2677-2682.
[11] CHIANG Chen-Sung,HUANG Ke-Nung,LI Yan-Chay,. Design of a Hand-Held Automatic Focus Digital Microscope by Using CMOS Image Sensor [J]. Measurement(S0263-2241),2015,70:88-99.
Auto-focusing and Control of Large Range Micro-vision System
LI Huiguang1,LI Min1,YUAN Renhui1,SHA Xiaopeng2,SHAO Nuan3
( 1. Institute of Electrical Engineering, Yanshan University, Qinhuangdao 066004, Hebei, China; 2. School of Control Engineering, Northeastern University at Qinhuangdao, Qinhuangdao 066004, Hebei, China; 3. Department of Environmental Engineering, Hebei University of Environmental Engineering, Qinhuangdao 066004, Hebei, China)
Aiming at the problem of large range focus in micro-vision system, a new focus search strategy was proposed. The improved SUSAN operator and wavelet transform operator were combined as a new focus evaluation function, which has the advantages of single peak and steep peak on both sides of the peak that was divided into a quick search of the flat area and Gaussian fitting steep zone. The effectiveness of the search strategy was verified based on the self-developed micro-vision system. Then, the motor was driven directly to reach the focal plane according to the fitting results. The experimental results show that the new focus search strategy has better effect on the aspects of the real time and accuracy.
micro-vision system; large range focus; SUSAN operator; DWT; Gaussian fit
1003-501X(2016)09-0009-05
TP391
A
10.3969/j.issn.1003-501X.2016.09.002
2015-11-30;
2016-02-24
河北省自然科学基金项目(F2012203111);中国环境管理干部学院科研基金资助项目(BJ201604)
李惠光(1947-),男(汉族),河北秦皇岛人。教授,主要研究工作是机器人控制与机器视觉。E-mail: YDLHG@163.com。
李敏(1989-),女(汉族),山东德州人。硕士,主要研究工作是显微视觉系统。E-mail: ldulimin@126.com。
猜你喜欢
数学物理学报(2022年5期)2022-10-09
小哥白尼(军事科学)(2022年2期)2022-05-25
数学物理学报(2021年2期)2021-06-09
数学物理学报(2021年1期)2021-03-29
应用数学(2020年2期)2020-06-24
红领巾·萌芽(2019年8期)2019-08-27
中学生数理化·高三版(2019年1期)2019-07-03
中国与非洲(法文版)(2017年10期)2017-11-23
试题与研究·高考数学(2016年1期)2016-10-13
肇庆学院学报(2016年5期)2016-03-11