采用激光PSD技术的载荷指向角度测量系统
2016-10-13 12:53方无迪张历涛彭海阔
光电工程 2016年9期
方无迪,杨 勇,范 凡,张历涛,彭海阔
采用激光PSD技术的载荷指向角度测量系统
方无迪1,杨 勇1,范 凡2,张历涛1,彭海阔1
( 1. 上海卫星工程研究所,上海200240;2. 上海航天技术研究院,上海201100 )
由于卫星星体结构热变形以及机械振动的影响,高精度载荷指向相对于精度基准会发生小角度的相对转动。在此背景下,本文提出了基于激光位置敏感器(PSD)技术的载荷指向角度测量方法,并研制了测量系统原理样机。该方法使用了有夹角双光束,并且是双光源、双反射镜、双传感器,可以使得测量装置结构紧凑、体积小、质量轻,布局位置灵活。样机实验结果表明,测量装置能够适用于卫星应用,满足载荷指向的转角测量需求。
载荷指向;角度测量;激光;位置敏感器
0 引 言
在卫星工程领域,高精度载荷的指向是关注的重点。由于卫星星体结构热变形以及机械振动的影响,高精度载荷的安装座相对于精度基准(比如星敏感器)会产生相对变形,由此使得高精度载荷指向发生小角度的相对转动。因此,有必要对载荷指向的转动角度进行测量,以便进一步的修正。在此背景下,所需研究的角度测量技术,一般要求范围为0.1²至30¢,测量精度要求在角秒级。
常用的角度传感器,比如电位式、电阻应变式、磁栅式、光栅式角度传感器,由于其传递距离较小,要通过刚性连接进行角度信息的传递,传递精度容易受连接件精度特性、稳定性等因素的限制[1]。因此,在测量行程较大,也就是基准点和被测点较远时,就不宜采用类似的接触式角度传感器,而应考虑光学测角方法。俯仰角和偏摆角的光学测量方法主要有自准直法、激光干涉法、光学内反射法[2];扭转角的测量方法主要有偏振光法、莫尔条纹法、光源靶标法、像形畸变法。此外光学测角方法还有环形激光法、平行干涉图法、摄影/摄像测量法等[3-6]。其中涉及滚转角的测量,比较合适的方法是采用几何光学法。马军山等[7]提出了使用长平面镜的两点法滚转角测量。张之江等[8]提出了一种利用反射V型镜作为测量敏感器的三维小角度测量系统。Fan[9]提出了使用角锥棱镜的平行双光束法测量方法。曹睿等[10]提出一种采用特殊斜方棱镜的平行双光束法的滚转角测量方法。Avanesov[11]等提出了一种使用线阵CCD的滚转角测量方法。
这些传统方法在小角度的精密测量中已经得到了成功的应用,有较高的测量精度和测量灵敏度,但是这些光学测量方法的测量装置结构一般都比较复杂,而且难以满足高测量精度中的自动化测量要求,并且上述测角方法只适用于一维或二维角度测量,不能实现对滚动角的测量[3]。而对于卫星工程领域,需要角度测量系统体积小、质量轻、结构简单,能够适应受限的布局安装环境。
本文结合卫星应用背景,提出了基于激光位置敏感器(Position Sensitive Device,PSD)技术的载荷指向角度测量方法,并研制了测量系统原理样机。该方法使用了有夹角双光束,且是双光源、双反射镜、双传感器,使得测量装置适用于卫星工程领域应用,能够满足载荷指向的转角测量需求。
1 系统方案
载荷指向角度测量系统的主要功能为:实现载荷指向的相对转角测量。载荷指向角度测量装置主要由激光角度测量单元、反射镜、数据采集与处理单元组成。激光角度测量单元安装于精度基准座,配合装于载荷的反射镜,通过激光PSD方法,可实现对载荷的相对转角测量。其中主激光角度测量单元和主反射镜完成主要测量工作,辅激光角度测量单元和辅反射镜进行误差补偿。数据采集与处理单元实现对激光角度测量单元的控制和数据处理及传输。
载荷指向角度测量系统的布局示意图如图1所示。其中,主反射镜安装于载荷出口段,并且反射镜朝向为斜向下成一定角度,对准基座上的主激光角度测量单元;辅反射镜朝向为水平,对准基座上的辅激光角度测量单元。当载荷指向轴线相对基座发生相对转动时,由主激光角度测量单元发射再经由主反射镜反射的光线会发生对应偏转,再由主激光角度测量单元内置的PSD位置传感器检测该光线偏移,最后就可以求解得到两者的相对转角。
以图2所示为例,说明绕轴和绕轴转角的测量。在变形前,激光角度测量单元内置的激光发射器,所发射出的激光经由载荷上的反射器反射,打在PSD位置传感器的中心。而当载荷轴线相对基座发生了绕轴转动,而产生相对转角θ时,反射激光会产生2θ的转角偏移,由此PSD位置传感器所接收光斑会发生沿向的偏移S。根据激光角度测量原理,该偏移S及距离与相对转角θ满足一定关系式,就可以通过检测偏移S,求解出相对转角θ。
同样的,绕轴转角也可以通过相同方法测量得到。当载荷指向轴线相对基座轴线同时发生了绕轴转动和绕轴转动时,通过检测光线偏移S和S,即可对应解算出绕轴相对转角θ、绕轴相对转角θ。与上述绕轴转动不同的是,由于主反射镜水平角的存在,载荷的绕轴转角θ,所引起的主反射镜法线相应转角应为2θcos。
最后,载荷轴线相对基座轴线的绕轴相对转角θ、绕轴相对转角θ,可以用主激光角度测量单元的PSD传感器测量值S和S表示,即:
另外需说明的是,图1所示的水平安装的辅激光角度测量单元和辅反射镜所起到的作用是进行误差补偿。需要进行误差补偿的工况为,当载荷绕轴转动相对于所需测量的绕轴绕轴转动不可忽略的情况下。虽然载荷绕轴转动,并不会导致载荷轴线与精度基准座的相对转动,但是会影响到主反射镜的反射功能(因为主反射镜的朝向没有和载荷平行),进而会影响到主激光角度测量单元的测量精度(当载荷的绕轴转动足够大的时候)。基于此,设计了水平安装的辅激光角度测量单元和辅反射镜,用于测量载荷的绕轴转动,并将测得转角用于上述两个转角测量的误差补偿。经辅助测量可以得到θ表达式。
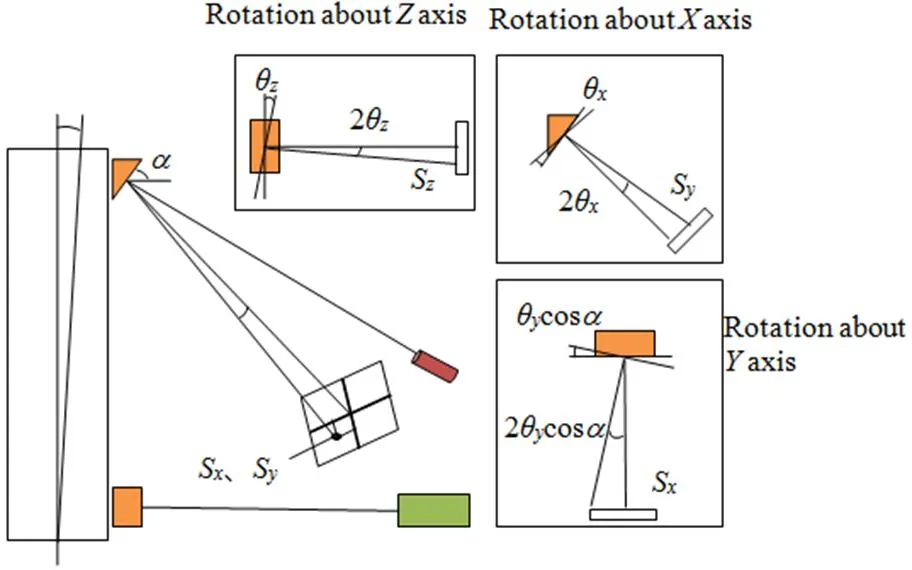
图2 转角测量示意图
采用辅助激光角度测量单元进行误差补偿,是通过测量载荷的轴转动θ,计算得到绕轴和绕轴测量的误差补偿项,具体如下所述。当载荷既不绕轴转动、也不绕轴转动,那么不论载荷是否绕轴转动,预期测量得到数值均应该位于零位,也就是绕轴转角和绕轴转角均为零。然而由于主反射镜的朝向没有和载荷平行,也就是存在大于零的水平角(如图3所示),那么当载荷发生轴转动时,会在测得绕轴转角和绕轴转角上引起误差附加项,即β、β。

图3 Z轴转动误差分析
如图3所示,将激光测量单元绕轴转动θ角度(等效于载荷发生轴转动),那么光轴的变化角在面的投影分量β和在面的投影分量β即为激光测量单元在测量绕轴转角和绕轴转角时的误差项。经过相关几何计算,可以得到下式。
经补偿后,载荷轴线相对基座的绕轴相对转角、绕轴相对转角为
代入并作简化计算,可将式中二阶小量略去(本文转角小于10¢),则得到最终结果表达式:
2 样机实验
按照上述方案,研制了一套载荷指向角度测量系统的原理样机,并搭建了实验系统,其原理图如图4所示。图中的激光PSD组件即包含了上述的主、辅激光角度测量单元,及相关支持电路。主、辅反射棱镜安装于载荷模拟工装上,并将两路激光反射回对应的PSD传感器。数据采集与处理单元负责控制激光器的开关和PSD信号的采集,并同工控机软件保持通信。工控机软件可以进行数据显示以及人机交互。
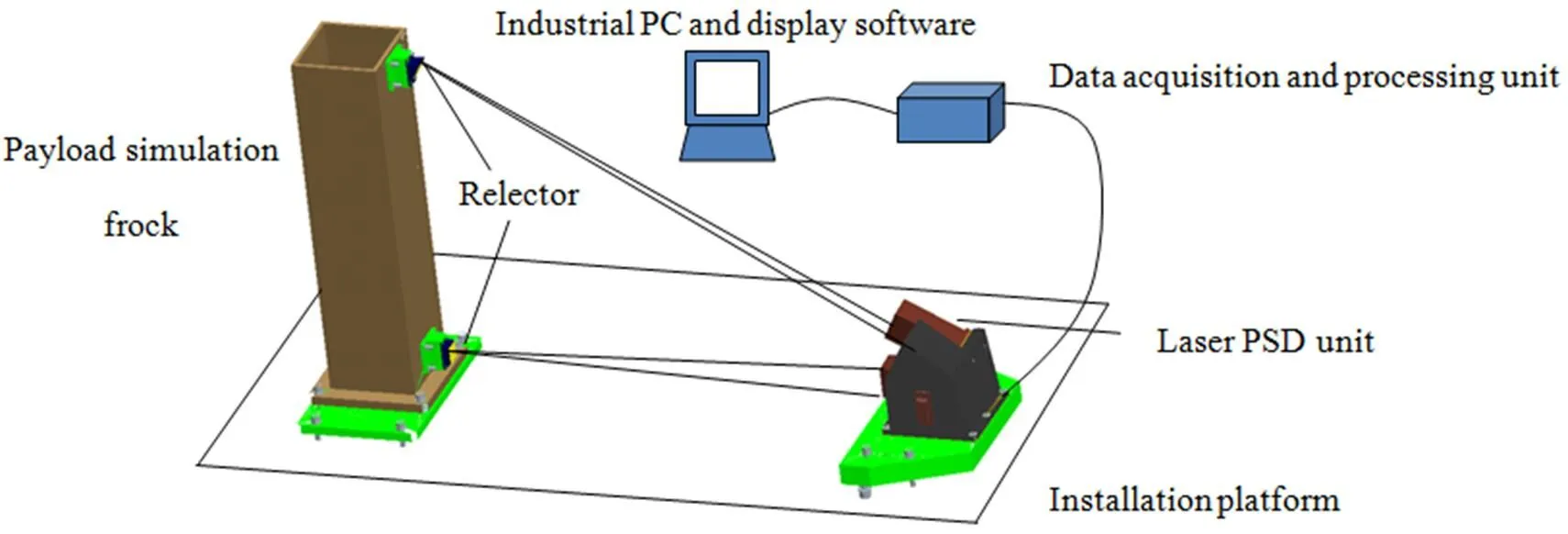
图4 实验原理图
针对载荷指向角度测量系统,展开了功能测试实验。实验的现场照片如图5所示。实验环境为无风的暗室环境。
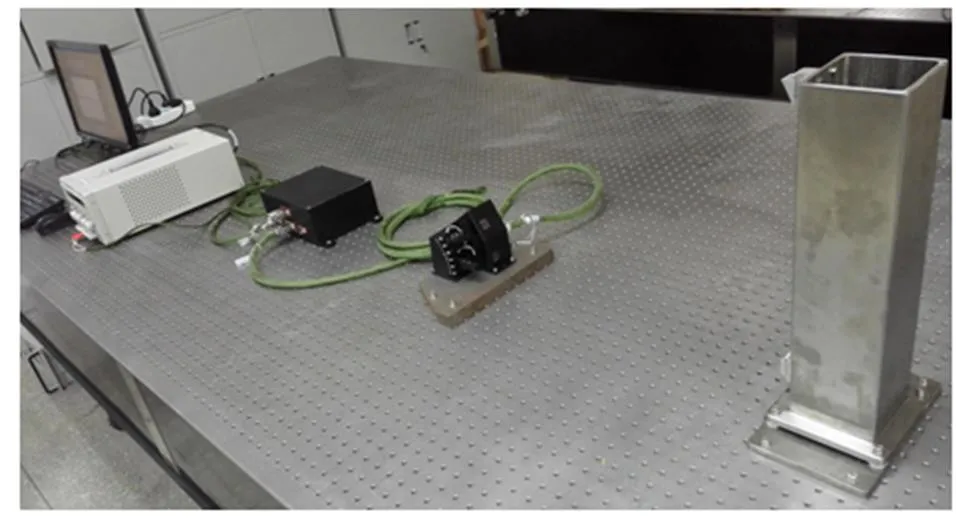
图5 实验现场图
长时测试结果如图6所示。图中每个测点间隔1 s。观察曲线可以发现初始有10 s的过渡期。经分析,是由于激光器和PSD传感器启动工作后需要一定的热平衡时间。在这之后,数据波动量小于0.5²(峰峰值)。
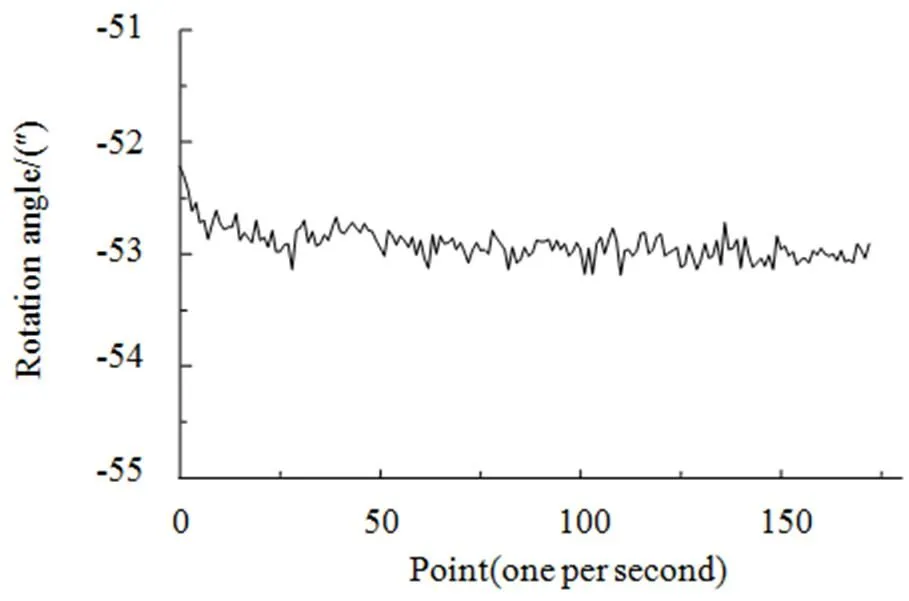
图6 长时测试(绕X轴转角)
稳定后绕转角和绕转角的实验结果如图7所示。从实验结果可以看出,重复测量误差优于0.5²。
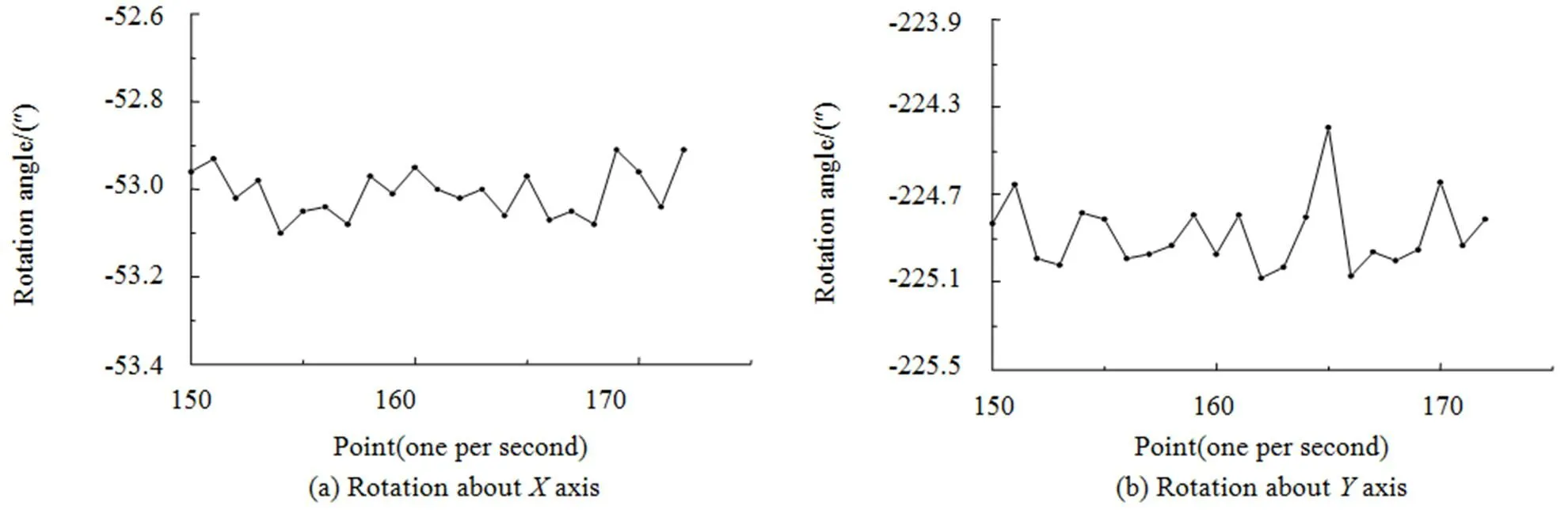
图7 实验结果(稳定后)
3 结 论
本文结合卫星应用背景,提出了基于激光PSD技术的载荷指向角度测量方法,并研制了测量系统原理样机。可以得到以下结论:
1) 所提出的方法,使用了有夹角双光束,结构紧凑,适用于卫星载荷指向角度测量;
2) 所研制的原理样机经过测试结果表明,重复测量误差优于0.5²。
参考文献:
[1] Venkateswara Krishna,Hagedom Charles A,Tumer Matthew D,. A high-precision mechanical absolute-rotation sensor [J]. Review of Scientific Instruments(S0034-6748),2014,85(1):71-79.
[2] 殷延鹤,乔彦峰,蔡盛,等. 大型结构角度变形测量中的光学方法[J]. 光电技术应用,2014,29(4):69-75.
YIN Yanhe,QIAO Yanfeng,CAI Sheng,. Optical Method for Angular Deformation Measurement of Large Structure [J]. Electro-Optic Technology Application,2014,29(4):69-75.
[3] 王文亮. 角秒级小角度测量技术及其在航天器中的应用研究[D]. 长沙:国防科学技术大学,2010:1-4.
[4] 周红锋,宫爱玲. 小角度测量的光学方法 [J]. 计量技术,2006(7):17-19.
ZHOU Hongfeng,GONG Ailing. Optical Methods for Measuring Small Angles [J]. Measurement Technique,2006(7):17-19.
[5] 冯萍,刘震. 舵面角度测量中结构光光条图像自动定位方法[J]. 中国光学,2014,7(6):911-916.
FENG Ping,LIU Zhen. Automatic localization method of the multi-planar strip in rudder angle measurement [J]. Chinese Optics,2014,7(6):911-916.
[6] GAO Hua,CHEN Hao,ZHANG Zhaoxiang,. Method of Binocular Rotation Angle Measurement Based on Machine Vision [C]// International Conference on Instrumentation and Measurement,Computer,Communication and Control,Harbin,China,Sept 18-20,2014:462-467.
[7] 马军山,王向朝,方祖捷. 滚转角误差的光学精密测量技术研究 [J]. 光学学报,2000,20(10):1403-1406.
MA Junshan,WANG Xiangzhao,FANG Zujie. Optical Precision Measurement Technique of Rolling Error [J]. Acta Optica Sinica,2000,20(10):1403-1406.
[8] 张之江,于瀛洁. 三维小角度测量系统建模[J]. 计量学报,2003,24(1):21-25.
ZHANG Zhijiang,YU Yingjie. Modeling of Three-Dimensional Small Angle Measurement System [J]. Acta Metrologica Sinica,2003,24(1):21-25.
[9] FAN Kuangchao,CHEN Mujung,HUANG W M. A six-degree-of-freedom measurement system for the motion accuracy of linear stages [J]. International J Mach Tools Manufact(S0890-6955),1998,38(3):155-164.
[10] 曹睿,张斌,冯其波,等. 多自由度误差同时测量中的滚转角测量方法[J]. 光学学报,2008,28(12):2344-2348.
CAO Rui,ZHANG Bin,FENG Qibo,. A Method for Roll-Angle Measurement in Multi-Degree-of-Freedom Measuring System [J]. Acta Optica Sinica,2008,28(12):2344-2348.
[11] Avanesov Yu L,Gorokhovsky K S,Granovskii V A,.Rotation angle measurement device Principle of operation and initial calibration results [C]// International Muti-Conference on Systems,Signals & Devices,Castelldefels-Barcelona,Spain,Feb 11-14,2014:1-6.
Payload Pointing Angle Measuring System by Employing Laser-PSD Technology
FANG Wudi1,YANG Yong1,FAN Fan2,ZHANG Litao1,PENG Haikuo1
( 1. Shanghai Institute of Satellite Engineering, Shanghai 200240, China; 2. Shanghai Academy of Spaceflight Technology, Shanghai201100, China)
As a result of the thermal deformation and mechanical vibration on satellite structure, the payload’s pointing regarding to the precision standard will be rotated with a small angle. In this background, a measurement method based on laser Position Sensitive Detector (PSD) technology for this purpose was suggested and a prototype was developed. This method uses unparallel double-beams, double light sources, double mirrors, and double sensors. And the measuring device has compact structure, small volume, light weight, and flexibility for layout. This experiment result shows that the measuring system is very suitable for satellite application and can meet the measurement requirement.
payload pointing; angle measuring; laser; position sensitive device
1003-501X(2016)09-0051-05
V47
A
10.3969/j.issn.1003-501X.2016.09.009
2015-12-31;
2016-03-30
国家自然科学基金资助项目(51505294)
方无迪(1990-),男(汉族),福建莆田人。硕士,助理工程师,主要从事卫星结构变形测量技术的研究工作。E-mail:fangwudi@foxmail.com。
猜你喜欢
新能源科技(2022年9期)2022-11-20
中学生数理化(高中版.高考数学)(2021年6期)2021-07-28
燃气涡轮试验与研究(2020年2期)2020-06-20
环境技术(2020年1期)2020-03-06
传媒评论(2017年8期)2017-11-08
北京信息科技大学学报(自然科学版)(2016年5期)2016-02-27
印制电路信息(2015年6期)2015-12-30
中国光学(2015年1期)2015-06-06
遥测遥控(2015年2期)2015-04-23
振动、测试与诊断(2014年6期)2014-03-01