全天域大气偏振模式的实时测量系统
2016-10-13 12:53范之国
光电工程 2016年9期
孙 洁,高 隽,怀 宇,毕 冉,范之国
全天域大气偏振模式的实时测量系统
孙 洁,高 隽,怀 宇,毕 冉,范之国
( 合肥工业大学计算机与信息学院,合肥 230009 )
为了研究大气偏振模式的实际变化规律,在分析了偏振测量装置发展现状的基础上,设计了全天域大气偏振模式实时测量系统,实现了单个主光路下,三路通道不同偏振方向的同时成像。通过光路仿真,优化并搭建了硬件装置,开展了误差分析和标定实验,提高了偏振测量精度,其中,系统线偏振度测量误差小于1.6%,偏振角测量误差小于±0.32°。在此基础上,开展了外场实验,结果表明,在晴朗少云的气象条件下,不同波段下的大气偏振模式分布与Rayleigh模型的差异值,也有着显著区别,其中,520 nm下的分布与Rayleigh模型最接近。
全天域;大气偏振模式;同时偏振测量;测量系统
0 引 言
大气偏振模式是太阳光在大气传输过程中因大气散射作用产生的偏振光所形成的特定偏振态分布,蕴含着丰富的环境、空间和方位信息[1-3]。研究发现,自然界中沙蚁、蝗虫等生物,在觅食、返巢等过程中,利用复眼中特殊的偏振光敏感结构,对大气偏振模式的分布信息进行感知,根据偏振信息的变化来获取方位信息,实现导航和定位,这对不依赖卫星的自主导航具有重要的启示和研究价值[4-6]。
自1809年Arago发现天空偏振现象以来,国内外学者对天空偏振展开了广泛的观测研究,研制了不同的观测装置,以获得更高精度的大气偏振模式[1,7-11]。如Kenneth. J. Voss等[7]设计了全天域偏振光辐射测量装置,该装置是一种单光路分时测量系统,通过旋转偏振器件,可依次获得不同偏振方向的偏振图像。但是,旋转偏振器件会导致系统时间分辨力降低,拍摄动态场景时,因获取场景不同,会造成显著的误差,该类装置比较适用于对静态场景的拍摄。为减小时间分辨力低带来的误差,北航的张颖[9]和Andrew R. Dahlberg[10]等通过电调谐的液晶可变延迟器(LCVR)代替传统偏振器件,利用电压控制LCVR快速获得不同方向的偏振图像,大大提高了时间分辨力,但LCVR对波长、光入射角度等有较高的要求[12]。
为了研究不同气象状况下,大气偏振模式在不同波段下的分布规律,本文利用从Fluxdata公司定制的三通道偏振测量相机设计了全天域大气偏振模式实时测量系统(简称“全天域偏振测量系统”),实现了单个主光路下,三路通道不同偏振方向的同时成像,克服了单光路分时测量系统中,因旋转偏振片引起的场景变化问题,同时简化了测量系统结构,降低了系统光学设计难度和配准复杂度,适用于动态和静态场景下的偏振成像测量;并且,系统中配置了多个波段的滤光片,可用于获取不同波段下的大气偏振模式信息。
1 系统设计
全天域偏振测量系统由鱼眼镜头、三个消色差双胶合透镜组成的中继镜片、多波段滤光片、微距镜头及三通道偏振测量相机构成。其中多波段滤光片由350 nm、405 nm、520 nm、660 nm、850 nm及全通(All-pass)波段组成;三通道偏振测量相机由分光棱镜、三个方向不同的线偏振片和三个CCD组成,三个偏振片及CCD组成三路偏振通道。如图1所示,天空光由鱼眼镜头180°视角输入,经中继镜片的光路调节、滤光片波段选择及微距镜头的调焦,输出最优光束至三通道偏振测量相机,分光棱镜按30%、35%和35%的分光比,将光传输至三路偏振通道,经偏振片的滤光及CCD的光电转换,输出三个不同偏振方向的偏振图像。
根据全天域偏振测量系统结构及元件光学特性,利用ZEMAX软件优化了系统光路,得到最优光路下元件的参数,并选择元件型号。经选型确定鱼眼镜头SIGMA 8 mm F3.5 EX DG、消色差双胶合透镜Thorlabs AC508-150-A-ML、微距镜头Nikon AF-S60/2.8G ED及各中心波段下带宽(10±2) nm的带通滤光片。根据设计的全天域偏振测量系统结构及经光路仿真确定的各光学元件间的连接参数,搭建相应的系统硬件结构。
本文设计了系统控制软件,实现了对硬件装置的控制。实验过程中,控制软件经1394接口与三通道偏振测量相机建立通信,根据实验需求获取180°视场的天空偏振图像,经处理后输出大气偏振模式信息。
全天域偏振测量系统对光传输过程中,描述了对光的吸收、反射等作用,可用4´4穆勒矩阵表示传输过程,则输入偏振光和输出偏振光间可建立如下关系式。
天空光经全天域偏振测量系统传输后,由控制软件获得三路通道的偏振图像,用表示通道(=1、2、3)下的图像强度,则由式(1)可得到:
2 系统分析与标定
根据第1节所述系统结构设计及测量原理,获得的偏振图像提取精确偏振信息,本文需要考虑系统误差对实验结果的影响,具体误差分析及标定分为如下几个方面:
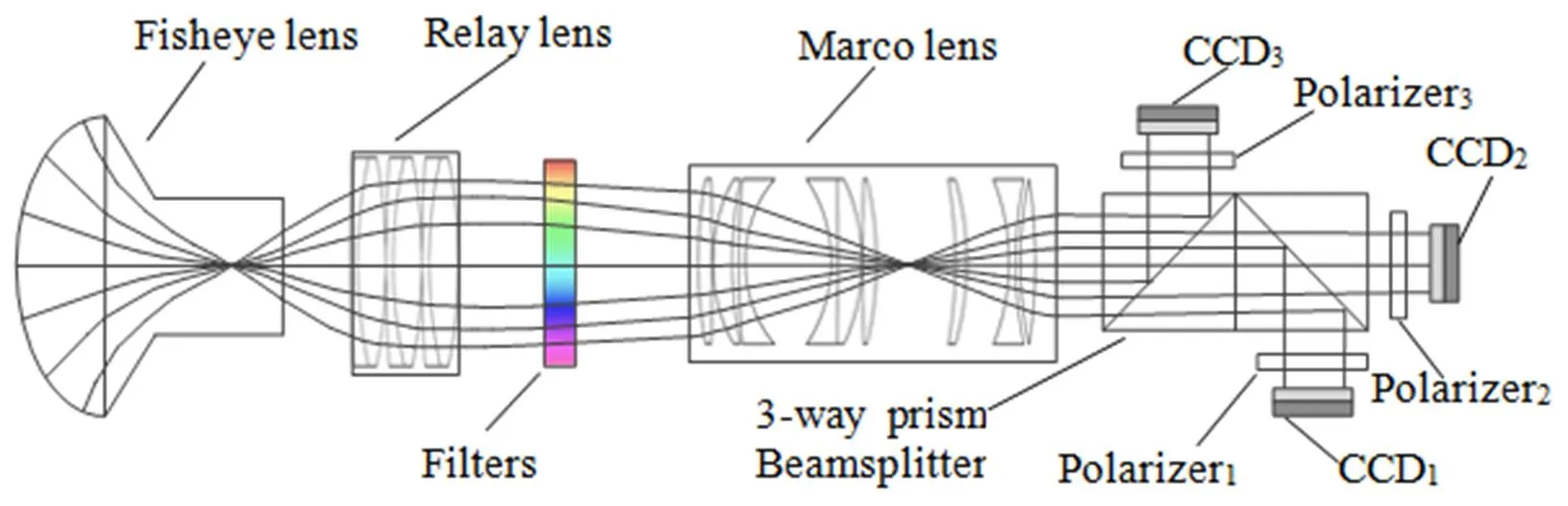
图1 全天域偏振测量系统结构图
2.1 三路通道CCD之间的像素偏移及配准
因CCD安装工艺原因,各通道光路与相应CCD成像面之间存在像素偏移,导致三通道图像间成像场景不一致。本文为确定像素偏移量,利用三通道偏振测量相机对不同场景的靶标进行拍摄。经处理发现,三通道图像间像素偏移主要表现为平面上的偏移,不随场景的变化而改变。设、(=2、3)分别表示通道图像相对于1通道图像的水平及竖直方向像素偏移。则通过拍摄棋盘格靶标,利用Harris算法[13]提取三通道图像特征点,求解通道图像特征点相对于1通道的像素差,可确定和在同一条件下多次重复该过程求解多组均值,得到=3.26,=32.42;=5.25,=34.92。
2.2 偏振片的偏振化方向误差分析及标定
全天域偏振测量系统中,偏振片理论方向分别为0°、60°、120°。因制造工艺、安装等原因,偏振片实际方向可能不等于理论值,若直接用理论值带入计算,会带来较大误差。因此,必须对偏振片方向标定。

图2 全天域偏振测量系统硬件装置
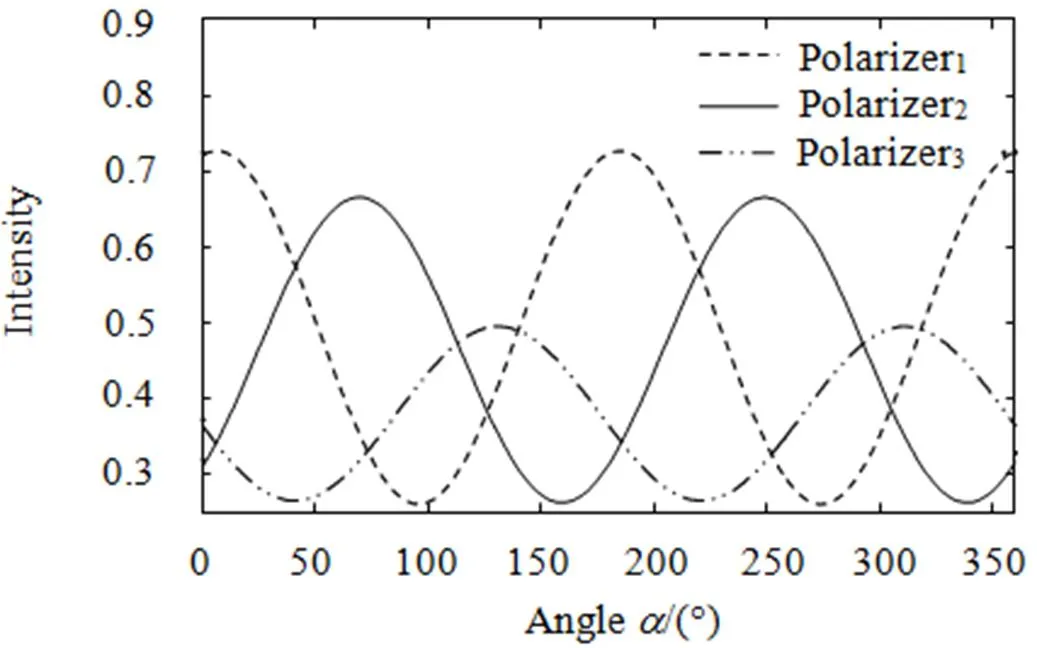
图3 三路通道偏振片对应的CCD响应拟合曲线
2.3 系统三路通道图像亮度分析及标定
由图3的数据可知,三路CCD的亮度不满足三通道偏振测量相机所标称的30%、35%和35%的分光比,因此需要对三路通道图像亮度进行分析和标定。
理论情况下,CCD响应是均匀的,但因制作工艺差异,在利用相机拍摄均匀平面时,图像强度与任一点灰度值之间存在一个未知关系。为确定与的关系,需对CCD响应情况进行分析。
以棋盘格作为靶标,用积分球输出完全非偏振光,搭建2.2节的实验装置,调节起偏器偏振方向,得到三通道最大响应时图像,任取多个黑色和白色棋盘格中心20×20区域,分析选定区域灰度值的变化情况。
如图4所示为选定区域灰度直方图。经分析计算得到,三通道图像选定区域的黑格及白格灰度值分布标准差均小于0.015。考虑到光在棋盘格靶标面分布不均匀性及图像相邻像素间的相关性带来的误差,本文认为三通道CCD响应均匀一致,则可由:
由以上分析可知,三通道图像的亮度差异主要是系统分光比不同造成的。设通道相对于1通道的分光比为(=2、3),则各通道图像强度间存在:
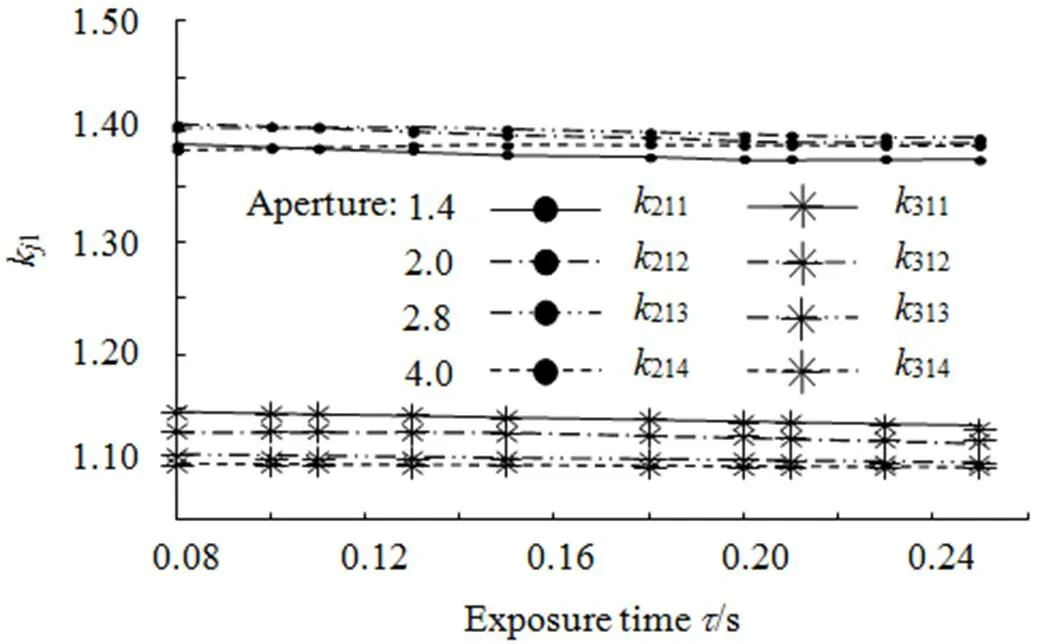
图5 kj1随曝光时间及光圈的变化情况
2.4 系统传输矩阵及测量精度标定
针对图1所示的全天域偏振测量系统结构,本文采用式(2)测量原理标定系统穆勒矩阵。因为系统中包含多个滤光片,则需根据不同波段的滤光片,分别标定系统的穆勒矩阵。
标定时,根据选择的波段,确定相应的标定光源,将其调节到适当强度,经由已知方向的线性起偏器,得到线偏振光,利用Stokes矢量仪测得线偏振光的Stokes矢量,该线偏振光经全天域偏振测量系统传输后输出偏振图像。由式(2)可知,在线偏振测量环境下,求解系统穆勒矩阵的第一行(置0),至少需要获得三个不同方向的线偏振光。所以调节起偏器的方向,重复以上步骤,分别得到三个不同方向线偏振光下的偏振图像。全天域偏振测量系统中包含三个不同偏振方向偏振片,由此可获得输出偏振图像,,(=1、2、3,表示三通道偏振测量相机中的三个偏振片),则三个不同标定光源经由偏振片输出后,系统输入和输出之间可表示:
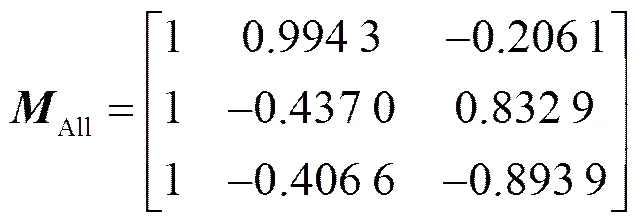
由式(6)即可求得线偏振片下的系统穆勒矩阵第一行。通过以上过程求得全天域偏振测量系统穆勒矩阵:
因系统滤光片包含了All-pass、350 nm、405 nm、520 nm、660 nm及850 nm波段,所以需要在不同标定光源下进行六次标定。重复以上标定步骤,分别得到各波段下的,如下所示。
,,
在以上误差分析和标定的基础上,本文对全天域偏振测量系统的测量精度进行了分析。全天域偏振测量系统的测量结果是以线偏振度和偏振角来表征,因此通过将系统测量的线偏振度和偏振角与Stokes矢量仪测量结果,进行对比的方法分析线偏振度和偏振角的测量精度。
利用2.2节偏振片的偏振化方向标定中的实验装置,以积分球的输出光源作为标定光源,实验过程中以15°作为旋转步长连续旋转起偏器,获得不同方向的偏振光,同时利用全天域偏振测量系统和Stokes矢量仪测量该线偏振光偏振信息,得到偏振度和偏振角。将二者测量结果对比,并求解多个不同偏振方向下误差均值,最终求得线偏振测量误差小于1.6%,偏振角测量误差小于±0.32°。
3 实验及结果分析
利用标定后的全天域偏振测量系统开展天空偏振信息测量实验,实验时间为2015年6月5日18点50分,实验地点是合肥工业大学操场,位于东经117°14′、北纬31°52′,实验天气条件是晴朗少云。如图6所示为各波段下的偏振模式分布,其中350 nm波段下,因经大气传输后透过量较少、CCD响应低等原因无法获得准确偏振模式信息,图中没有列出。
在晴朗少云天气条件下,大气散射模型可近似为瑞利散射(Rayleigh)模型,本文利用Rayleigh模型对实测条件下的大气偏振模式分布进行仿真,如图6所示。将实测结果与仿真结果进行对比,可以发现,实测的天空偏振度及偏振角分布具备Rayleigh模型仿真的分布特点,与Rayleigh模型比较接近;不同波段下偏振模式分布随着波段发生变化,其中520 nm下偏振度分布和Rayleigh模型最为接近。将各个波段的偏振角分布与Rayleigh模型分布进行对比分析,如图7所示为理论与实测差值平方分布。对各个波段下有效区域内偏振角误差平方值进行分析,得到520 nm波段下误差平方最大值为0.056 7,相对于其他波段最小,说明晴朗少云天气条件下,520 nm下的偏振角分布和Rayleigh模型最为接近。

图7 实测偏振角误差平方分布
根据以上外场实验结果及分析可知,全天域偏振测量系统是有效可靠的,可用于开展大气偏振模式分布特性实验研究,在晴朗少云的条件下,520 nm波段下的大气偏振模式和Rayleigh模型最为接近。
4 结 论
大气偏振模式作为地球的自然属性,蕴含丰富的环境信息,具有重要的研究价值。本文利用三通道偏振测量相机设计了全天域大气偏振模式实时测量系统,实现了单个主光路下,三路通道不同偏振方向的同时成像,避免了分时测量系统操作繁琐、时间分辨力低等问题,同时降低了系统光学设计难度和配准复杂度,适用于动态和静态场景下的偏振成像测量;经过对误差的分析与标定,提高了系统的测量精度,其中,系统的线偏振度测量误差小于1.6%,偏振角测量误差小于±0.32°。利用全天域大气偏振模式测量系统开展了外场实验,实验结果表明,全天域大气偏振模式实时测量系统达到了设计要求,具有较好的测量效果,为开展大气偏振模式的观测研究提供了有效的测量装置。
参考文献:
[1] Gál J,Horváth G,Meyer-Rochow V B,Polarization patterns of the summer sky and its neutral points measured by full–sky imaging polarimetry in Finnish Lapland north of the Arctic Circle [C]//Proceedings of the Royal Society of London A:Mathematical,Physical and Engineering Sciences,London,England,2001,457(2010):1385-1399.
[2] Horváth G,Bernáth B,Suhai B,First observation of the fourth neutral polarization point in the atmosphere [J].Journal of the Optical Society of America A(S1084-7529),2002,19(10):2085-2099.
[3] 吴良海,张骏,范之国,等. 多次散射因素影响下天空偏振光模式的解析模型 [J]. 物理学报,2014,63(11):210-217.
WU Lianghai,ZHANG Jun,FAN Zhiguo,. An analytical model for skylight polarization pattern with multiple scattering [J]. Acta Physica Sinica,2014,63(11):210-217.
[4] Brines M L,Gould J L. Skylight polarization patterns and animal orientation [J]. Journal of Experimental Biology(S0022-0949),1982,96(1):69-91.
[5] Horvath G,Varju D. Polarized Light in Animal Vision:Polarization Patterns in Nature [M]. Springer,2004:63-106.
[6] 晏磊,关桂霞,陈家斌,等. 基于天空偏振光分布模式的仿生导航定向机理初探 [J]. 北京大学学报:自然科学版,2009,45(4):616-620.
YAN Lei,GUAN Guixia,CHEN Jiabin,The Bionic Orientation Mechanism in the Skylight Polarization Pattern [J]. Acta Scientiarum Naturalium Universitatis Pekinensis,2009,45(4):616-620.
[7] Voss K J,LIU Yi. Polarized radiance distribution measurements of skylight. I. System description and characterization [J]. Applied Optics(S1559-128X),1997,36(24):6083-6094.
[8] 张忠顺,高隽,吴良海,等. 全天域偏振模式测量系统设计与实现 [J]. 光电工程,2014,41(8):33-39.
ZHANG Zhongshun,GAO Jun,WU Lianghai,Design of an Omnimax Polarization-mode Measurement System [J]. Opto-Electronic Engineering,2014,41(8):33-39.
[9] ZHANG Ying,ZHAO Huijie,SONG Ping,Ground-based full-sky imaging polarimeter based on liquid crystal variable retarders [J]. Optics Express(S1094-4087),2014,22(7):8749-8764.
[10] Dahlberg A R,Pust N J,Shaw J A. Effects of surface reflectance on skylight polarization measurements at the Mauna Loa Observatory [J]. Optics Express(S1094-4087),2011,19(17):16008-16021.
[11] Horvath G,Barta A,Gál J,. Ground-based full-sky imaging polarimetry of rapidly changing skies and its use for polarimetric cloud detection [J]. Applied Optics(S1559-128X),2002,41(3):543-559.
[12] 张颖,赵慧洁,周鹏威,等. 液晶相位可变延迟器的光电特性研究 [J]. 国外电子测量技术,2009,28(3):17-20.
ZHANG Ying,ZHAO Huijie,ZHOU Pengwei,. Photoelectric characteristics of liquid crystal variable retarder [J]. Foreign Electronic Measurement Technology,2009,28(3):17-20.
[13] Harris C,Stephens M. A combined corner and edge detector [C]//Proceedings of the 4th Alvey Vision Conference,Manchester,England,August 31-September 2,1988,15:147-151.
Real-time Measurement System for the Pattern of All Skylight Polarization
SUN Jie,GAO Jun,HUAI Yu,BI Ran,FAN Zhiguo
( School of Computer and Information, Hefei University of Technology, Hefei 230009, China)
For researching the pattern of skylight polarization, a real-time measurement system which can capture images of different polarization direction at the same time was designed based on the analysis of existing measurement systems. Based on system light path simulation, the equipment was built and optimized. The error analysis and calibration was made for the equipment and the measuring accuracy was improved. The error of linear polarization degree is less than 1.6%, and error of polarization angle is less than ±0.32°. Outdoor experiments were carried out after calibration. In different bands, the results between the pattern of skylight polarization and Rayleigh model are significantly different. In 520 nm band, the data is close to Rayleigh model’s result.
all skylight; pattern of skylight polarization; simultaneous polarization measurement; measurement system
1003-501X(2016)09-0045-06
O436
A
10.3969/j.issn.1003-501X.2016.09.008
2015-11-20;
2016-01-24
国家自然科学基金(61571175,61571177)
孙洁(1990-),女(汉族),安徽亳州人。硕士研究生,主要研究工作是大气偏振信息获取与处理。E-mail: sj_jing@qq.com。
范之国(1979-),男(汉族),安徽霍山人。副教授,研究生导师,主要研究方向是智能信息处理。E-mail: ibcshfut@163.com。
猜你喜欢
物理学报(2022年23期)2022-12-14
航天返回与遥感(2022年2期)2022-05-12
中国惯性技术学报(2020年2期)2020-07-24
知识就是力量(2020年4期)2020-05-20
光学精密工程(2020年2期)2020-04-08
成都信息工程大学学报(2019年4期)2019-11-04
电子制作(2019年12期)2019-07-16
火力与指挥控制(2019年4期)2019-06-14
电子制作(2018年2期)2018-04-18
制导与引信(2017年3期)2017-11-02