
一种基于电机模型预测的三电平死区补偿方法
2016-10-12 00:30田凯金雪峰张策牛松森高盛
电气传动 2016年4期
田凯,金雪峰,张策,牛松森,高盛
(天津电气科学研究院有限公司,天津300180)
一种基于电机模型预测的三电平死区补偿方法
田凯,金雪峰,张策,牛松森,高盛
(天津电气科学研究院有限公司,天津300180)
分析了三电平电压型逆变器死区效应产生的机理,针对电流采样延时和寄生电容影响而导致死区补偿不准的问题,提出了一种基于电机模型预测的三电平电压型逆变器死区补偿方法。该方法首先建立了三电平电压型逆变器驱动异步电机的数学模型,并根据该模型和瞬时电流采样值,计算出实际瞬时电流的预测值,然后将电流预测值和器件开关状态代入该模型计算出准确的补偿时间,实时的对补偿电压进行调整。最后,改进算法在7.5 kW感应电机变频调速系统上进行了实验验证,结果证明了该补偿方法能有效改善电机的电流波形。
三电平逆变器;死区补偿;电机模型预测
在三电平逆变器中,为防止同一桥臂互补导通的开关管直通,通常需在开关管的开通和关断时刻加入一定的死区时间以延迟开关器件导通。死区的设置会使实际输出电压与给定电压之间出现偏差,导致输出电流波形畸变和电机转矩脉动,在输出电压较低时这种影响尤为严重[1]。同时也降低了直流电压利用率和逆变器效率。
现已有许多学者对死区补偿方法进行了研究,基本上可分为硬件补偿和软件补偿两种[2-5]。硬件补偿大体分为电压检测补偿和电流极性检测补偿:电压检测补偿通过实时采集到的输出电压与给定电压进行比较,将误差反馈到给定通道进行补偿[6];电流检测补偿通过硬件电路实时检测电流极性,判断补偿电压[7]。由于硬件补偿方法也有采样信号滞后、过零点抖动等问题,而且需要额外的硬件电路,会使成本增加,所以在实际中并不常用。软件补偿大体分为两种:1)通过计算对电压平均值进行补偿,该方法简单易行,但对于电流过零点附近的补偿效果不佳[8];2)通过在每个PWM周期内采集电流极性实时对输出电压进行补偿,补偿效果取决于电流采样的准确性和实时性,若电流检测不准或滞后时间过长则导致补偿不准,反而可能会使死区影响加重[9-11]。
功率开关器件的寄生电容对器件的开通和关断也有影响,寄生电容的存在相当于减小了死区时间,应对补偿电压进行调整[12]。
本文以异步电机控制模型为基础,提出了一种基于电机模型法预测控制的死区补偿方法。该方法以电流采样时刻值作为初值,根据电机控制模型计算出当前实际的瞬时电流值,并考虑了寄生电容在不同电流下对输出电压的影响,连续的在每个瞬时采样周期更新补偿电压,使死区补偿保持实际上的最优。
1 电机矢量控制模型
异步电机非对称T型等效电路如图1所示。
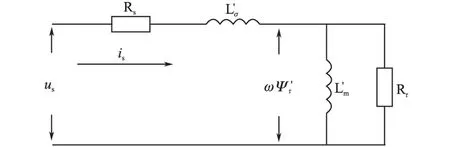
图1 异步电机非对称T型等效图Fig.1 Asymmetrical T type equivalent circuit of induction motor at standstill
图1中,Rs为电机定子电阻,Rr为电机转子电阻,L′σ为等效电机漏感,L′m为等效电机励磁电感,is为定子电流,us为逆变器输出侧电压,为电机励磁绕组两端电压[1]。

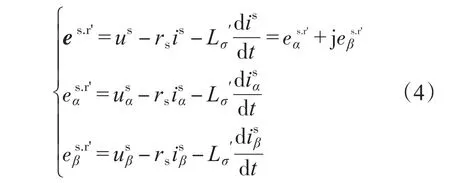
定子磁链矢量在定子绕组中感应出的全电动势矢量为

转子磁链在定子绕组感应的电动势矢量积分为

由式(1)~式(3)得:
转子磁链Ψr′在空间以同步角速度ωs旋转,它与定子轴夹角为φs,则
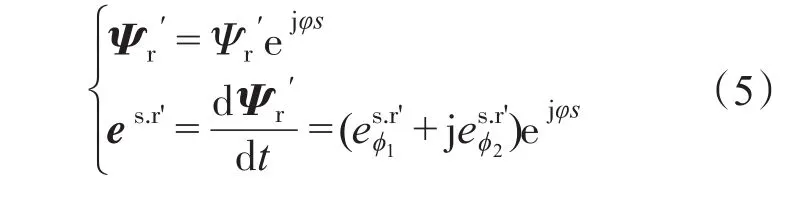
由于坐标轴ϕ1位于矢量Ψr′的方向上,则

由上述公式可推导出电压矢量模型如图2所示。
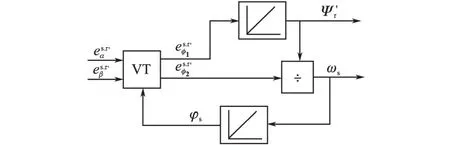
图2 电压矢量模型图Fig.2 Voltage vector model
2 死区效应及补偿电压
2.1死区效应分析
图3示出了三电平PWM逆变器单相桥臂电路以及死区效应的原理,其中电压参考点选为电容中点,电流以流出逆变器为正方向。

图3 死区效应原理图Fig.3 Schematic of dead time effect
图3中,V1~V4是开关器件,D1~D4是续流二极管,D5和D6是钳位二极管,S1~S4是器件V1~V4的驱动信号。PWM调制选用上下两部分同相三角波载波比较方式,CB=1表示三角载波的下降段,CB=0表示三角载波的上升段,U*为给定电压,U为实际输出电压,Udc为直流侧电压,I为实际输出电流,并以流出为正方向,Td为死区时间。
当电压给定U*>0,实际电流I>0时,若V1由开通转为关断,由于电感电流不能突变,电流将通过D5续流,实际输出电压U迅速由高电平变为零电平,不受死区影响;若V3由开通转为关断,此时V1由于死区设置也保持关断,电流仍然通过D5续流,逆变器输出电压U保持零电平。当死区结束,V1开通,U才变为高电平。可见,在图3条件下,死区效应导致逆变器输出相电压在1个开关周期内比给定值少开通Td时间,其伏秒面积-Td·Udc/2,实际电压小于期望电压。由于上下载波同相,给定U*的极性对于死区影响效果是一致的。同理,可以获得I<0时的死区效应对输出电压影响情况。三电平逆变器输出相电压受死区影响如表1所示。
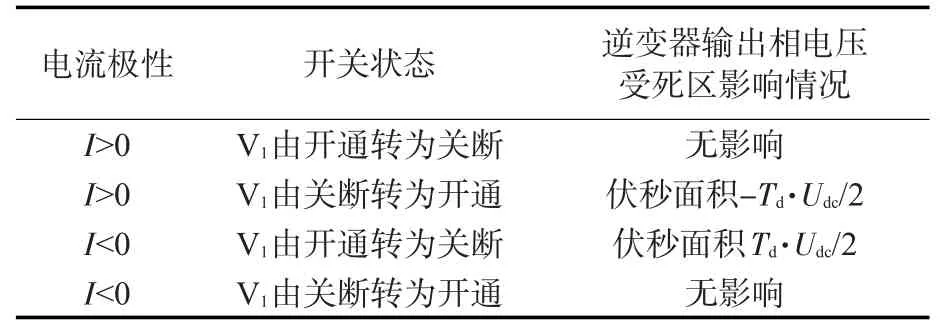
表1 死区效应对输出电压的影响Tab.1 Dead-time effect on output voltage
2.2电压补偿方法
根据伏秒平衡定理,一般采用对电压给定进行补偿的方法实现死区时间的补偿,其原理如图4所示。

图4 死区补偿原理Fig.4 Fundamental of dead-time compensation
图4中,当电压给定U*为“+”,电流为“+”时,在三角波下降段,由V3切换到V1时,D5中流过电流、V3中无电流,在三角波上顶点给定电压加上1个附加值ΔU,使V3提前关断,消除V1开通的死区时间Td1;三角波上升段,V3开通延时对输出电压无影响,V1按时关,V3延时开。
当电压给定U*为“+”,电流为“-”,在三角波下降段,V1中没有电流,因此V1开通延时对输出电压无影响,V3按时关,V1延时开;三角波上升段,电流从V1切换到D5,V3中无电流,在三角波下顶点给定电压减去1个附加值ΔU,使V1提前关断,消除V3开通的死区时间Td2。
当电压给定U*为“-”、电流为“+”,其死区补偿与电压为“+”时相同,参见图4,不再赘述。
从上述分析看,死区补偿与给定电压极性无关,仅与电流极性和三角波前后半周期相关。具体为:电流极性为“+”,在三角波前半周期给定电压加补偿电压ΔU;电流极性为“-”,在三角波后半周期给定电压减补偿电压ΔU。
实际装置中,电流采样一定会有滞后,当开关动作时,实际电流的极性可能已经发生变化。当电流较小时,寄生电容对于输出电压的影响也不可忽略。上述方法忽略了电流采样时间的滞后以及寄生电容对补偿效果的影响,因此补偿并不太完美,需要再进一步完善。
3 基于电机模型的电流预测
三电平逆变器驱动异步电机如图5所示。
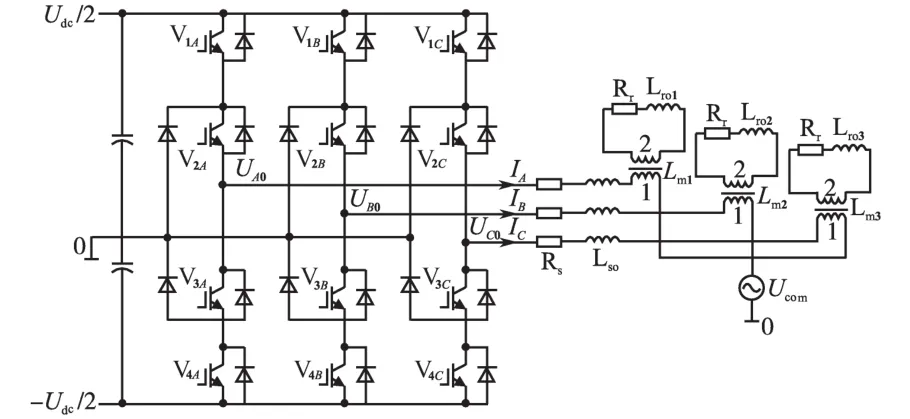
图5 三电平逆变器驱动异步电机等效电路图Fig.5 Equivalent circuit diagram of three-level inverter driving asynchronous motor
图5中Ux0为逆变器出口处的电压,Ix为逆变器的输出电流(以流出为正方向,x=A,B,C),Rs为定子电阻,Lso为定子漏感,Lro为转子漏感,Lm为定转子互感,Ucom为电机公共点处共模电压。
根据上节的分析,要想精确补偿死区,需要考虑电流采样滞后的影响。对于每个电流采样周期,电流采样结果为该周期内电流的平均值,它近似等于采样周期中点时刻的电流值,采样周期越短,这一近似效果越好。考虑到任意时刻功率器件的开关状态都是已知的,则图5的电路结构明确,若以采样值作为当前采样周期中点时刻的电流初值,可以预测出后续任意时刻的电流变化,直到开关动作发生改变。基于上述原理,本文采用这一预测电流结果来做死区补偿,从而使补偿效果更加精确。
根据图5,逆变器输出电压可表示为

式中:Lr为转子电感,Lr=Lm+Lro;ωΨx为由第1节中电压模型算出的磁链乘以同步角速度得到(x= A,B,C)。
若x相上面2个开关管导通,则Uxo=+Udc/2;
若x相中间2个开关管导通,则Uxo=0;
若x相下面2个开关管导通,则Uxo=-Udc/2。
电机公共点处共模电压为:

由式(8)可得:

式中:ΔT为采样等效延时。
在采样频率比较高时,ΔIx等效为式(8)中的dIx,ΔT等效为式(8)中的dt。
式(8)~式(10)中,反电势ωΨx可根据第1节中电机矢量控制模型算出,Ucom可根据当前开关状态确定,那么当前时刻实际电流Ix′=Ix+ΔIx,后面将根据Ix′电流极性、电流幅值和逆变器开关状态计算补偿时间。
4 寄生电容的影响和补偿方法
4.1功率器件寄生电容影响
功率开关器件寄生电容也会对逆变器输出电压有影响,文献[13]对此进行了详细分析。
以A相Ua*0>0为例,当CB=1,IA<0时,下管V3关断,上管V1延时开通,则A相输出电压如图6所示。

图6A相输出电压Fig.6 Output voltage of phase A
图6中,当下管V3关断后,电流将通过D5续流。理想情况下,电压将在t0时刻立刻由0变为+Udc/2,而实际情况下,电流会对功率管的寄生电容充电,使输出电压有一定的上升时间,上升时间即完全充电时间为T1=CUdc/2IA,其中C为寄生电容值。寄生电容会使实际电压小于期望电压,其缺失的伏秒面积为图6中三角形阴影面积,该误差与寄生电容值、开关管动作时刻实际电流值有关。
4.2补偿方法
功率器件寄生电容对输出电压的影响与相电流的极性、幅值有关,因此需要计算寄生电容的影响时间。下面以A相为例详细说明补偿方法,Ton为开关器件开通延时,Toff为开关器件关断延时,C为开关器件的结电容和等效分布电容值,T′d为实际死区时间,为充放电时间。
以U*>0为例:
1)当CB=1,IA′≥0时,开关管V3关断后,电流由D5续流,输出电压依然保持为0,经过死区时间Td和开通延时Ton时间后,上管V1才实际导通,因此补偿时间Tc=Td+Ton。
2)当CB=1,IA′<0时,,若T1>,使图7a中三角形阴影部分与梯形阴影部分面积相等可得:

若T1≤Td′如图7b所示,同理可得:

图7 CB=1,IA′<0时A相输出电压Fig.7 Output voltage of phase A at CB=1,IA′<0
因为理想情况下电压应在t0时刻从0上升到+Udc/2,而实际情况如图7所示,电压存在逐渐上升的过程,从而实际电压可等效为在tc时刻从0上升到+Udc/2,所以补偿时间Tc=Toff+T2。
3)当CB=0,IA′<0,当上管V1关断后,电流由D1续流,输出电压依然保持为Udc/2,经过死区时间Td和开通延时Ton时间后,下管V3才实际导通,因此补偿时间Tc=Td+Ton。
4)当CB=0,IA′≥0,T1=-CUdc/2IA′,若T1>Td',使图8a中三角形阴影部分与梯形阴影部分面积相等可得:

若T1≤Td′如图8b所示,同理可得:

因为理想情况下电压应在t0时刻从 +Udc/2下降到0,而实际情况如图8所示,电压存在逐渐下降过程,从而实际电压可等效为在tc时刻从+Udc/2下降到0,所以补偿时间Tc=Toff+T2。

图8 CB=0,IA'≥0时A相输出电压Fig.8 Output voltage of phase A at CB=0,IA'≥0
当U*<0时,计算方法同上述过程一样。一般当U*比较小时,为了避免窄脉冲影响,可采用双载波同相交错调制,上述死区补偿方法同样适用,如图9所示。
根据图3推导出补偿电压Uc=2UdcTc/Ts,根据图9推导出补偿电压Uc=4UdcTc/Ts,其中Ts是PWM逆变器三角波载波周期。由于瞬时值采样频率远高于载波周期,在每一个瞬时采样周期都会计算更新补偿电压,始终把新的补偿值建立在实际的基础之上,使控制保持实际上的最优。
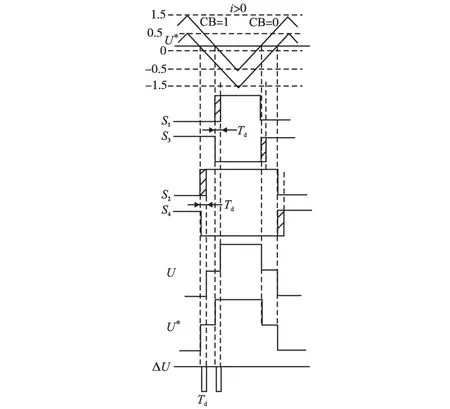
图9 双载波同相交错调制Fig.9 Double carrier phase modulation
5 实验
为验证上述方法的有效性,在7.5 kW电机试验台上做了验证。电机参数为:PN=7.5 kW;UN= 380 V;IN=18 A;nN=980 r/min。PWM载波频率为0.625 kHz,死区时间为5 μs。

图10 0.5 Hz空载时电流波形Fig.10 Current waveforms with 0%load at 0.5 Hz
图10为电机工作在0.5 Hz,空载下的电流波形以及谐波分析波形。图10a为无死区补偿的波形;图10b为采用死区补偿后的波形。可知采用上述补偿方法后,低频下电流波形得到明显改善。
图11为理想电压与实际电压对比波形,图11中通道1,2为A相理想正、负半周期电压波形,通道3为实际电流值,通道4为逆变器A相实际输出电压波形。可知补偿后实际输出电压与理想电压在各种情况下都基本上实现了面积等效。
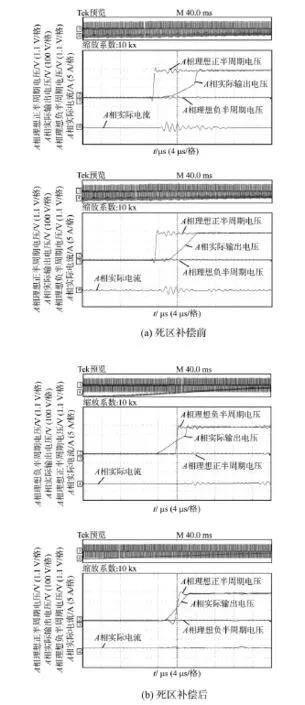
图11 理想电压与实际电压对比波形Fig.11 Ideal voltage compared with the actual voltage waveforms
6 结论
本文分析了电压型三电平PWM逆变器死区效应的原理以及开关器件寄生电容对输出电压影响,针对传统补偿方法受电流采样滞后影响这一问题,以逆变器驱动异步电机系统为例提出一种电流预测方法。根据逆变器输出电压方程算出电流变化率并得到电流预测值,并根据预测电流对死区效应和开关器件寄生电容效应进行补偿。在7.5 kW感应电机试验台上获得的试验结果表明,所述方法能够较为准确地预测电流,电压补偿效果理想,和补偿前相比,逆变器输出电流波形有显著改善。
[1] 马小亮.高性能变频调速及其典型控制系统[M].北京:机械工业出版社,2010.
[2] 陈惠荣.逆变器死区效应机理和典型补偿方式的研究[D].天津:天津大学,2006.
[3] 毛鸿,吴兆麟.基于三相PWM整流器的无死区空间矢量调制策略[J].中国电机工程学报,2001,21(11):100-104.
[4] 金舜,钟彦儒.一种新颖的同时考虑中点电位平衡和窄脉冲消除及死区补偿的三电平空间矢量脉宽调制方法[J].中国电机工程学报,2005,25(6):60-66.
[5] 孙向东,钟彦儒.一种新颖的死区补偿时间测量方法[J].中国电机工程学报,2003,23(2):103-107.
[6] 于泳,魏彦江,王高林.IGBT的死区补偿方法研究[J].电力电子技术,2007,41(12):126-128.
[7]Leggate D,Kerkman R J.Pulse-based Dead-time Compensator for PWM Voltage Inverters[J].IEEE Trans.On IE,1997,44(2):191-197.
[8] HyunSoo K,KyeongHwa K.On-line Dead-time Compensation MethodBased on Time Delay Control[J].IEEE Trans.on Control System Technology,2003,11(2):279-285.
[9] 杨立永,陈智刚,陈为奇,等.逆变器输出电压模型及新型死区补偿方法[J].电工技术学报,2012,27(1):182-187.
[10]Summers T,Betz R.Dead-time Issues in Predictive Current Contro[lC]//IEEE IAS Annu.Conf.Rec.2002:2086-209.
[11]王连芳,王建民.电压源型PWM逆变器死区效应补偿策略研究[J].电气传动自动化,2010,32(5):13-17.
[12]Urasaki N,Senjyu T,Funabashi T,et al.Dead Time Compensation Strategy for Permanent Magnet Synchronous Motor Drive Taking Zero-current Clamp and Parasitic Capacitance Effects Into Account[J].IEEE proc.Electron Power Appl,2005,152(4):845-853.
Method of Dead-time Compensation in Three-level Inverter Based on Motor Model Predictive Control
TIAN Kai,JIN Xuefeng,ZHANG Ce,NIU Songsen,GAO Sheng
(Tianjin Research Institute of Electric Science Co.,Ltd.,Tianjin 300180,China)
The dead-time effect of the three-level voltage inverter was analyzed.A method of dead-time compensation for three-level voltage source inverters based on motor model predictive was introduced,for which the delay of current sampling and parasitic capacitance effects could lead to inaccurate of dead time compensation into account.The mathematical model of induction motor with three-level voltage source inverter had been established,and the current value in future could be calculated by substituting the instantaneous value of current and switching state into the model.Then the current polarity could be judged.At last,in order to test the performances of the improved method,experiments were carried on variable frequency speed control system for 7.5 kW induction motor.The experiment results proved that the current waveform of induction motor is effectively improved by the proposed method.
three-level inverter;dead-time compensation;motor model predictive control
TM921
A
2015-09-10
田凯(1987-),男,本科,工程师,Email:tiankai_answer@163.com
猜你喜欢
工程数学学报(2020年6期)2021-01-09
通信电源技术(2018年3期)2018-06-26
科技创新与应用(2017年1期)2017-05-11
航空兵器(2016年5期)2016-12-10
电测与仪表(2016年5期)2016-04-22
电测与仪表(2016年5期)2016-04-22
电测与仪表(2016年10期)2016-04-12
电测与仪表(2016年22期)2016-04-12
焊接(2016年7期)2016-02-27
北京信息科技大学学报(自然科学版)(2016年6期)2016-02-27
