
高压永磁同步电机开环矢量控制系统研究
2016-10-12 00:30陈伟金辛海胡志涛
电气传动 2016年4期
陈伟,金辛海,胡志涛
(上海新时达电气股份有限公司,上海 201801)
高压永磁同步电机开环矢量控制系统研究
陈伟,金辛海,胡志涛
(上海新时达电气股份有限公司,上海 201801)
主要对高压永磁同步电机无速度传感器矢量控制(简称开环矢量控制)系统的设计进行了研究,详细分析了H桥功率单元级联型高压变频器的硬件拓扑结构,并根据高压永磁同步电机的数学模型,对其开环矢量控制算法进行了研究,最后通过实验验证了算法的有效性。
H桥单元级联型高压变频器;高压永磁同步电机;开环矢量控制
近些年受国家节能政策调控实施以及工矿企业节能降耗需求,高压变频器的应用逐年扩大,其节能效果得到了广泛认可,市场需求越来越大。
根据其高压组成方式,高压变频器可分为直接高压型和高-低-高型。高-低-高型高压变频器由于经过2次电压转换,增加了额外的电能消耗,节能效果有所降低,并且体积大,还产生了大量的高次谐波,然而这种技术难度低,适用于功率较小的高压电机。直接高压型高压变频器直接输出高压,无需输出变压器、效率高、输出频率范围宽,应用更为广泛[1]。
永磁同步电机具有体积小、功率密度高、损耗小,效率高等优点。与直流电机比,它没有换向器和电刷等易损件,可靠性高;和异步电机相比,它不需要无功励磁电流,功率因数高,损耗减小,效率高,力矩惯量比大。而永磁同步电机的矢量控制一般通过编码器对电机转子的转速和角度进行检测。然而编码器的使用,不仅增加了系统成本、尺寸,更是增加了安装和布线的难度,安装不当会严重影响到电机的稳定运行。同时编码器对使用环境有较高要求,电磁干扰、湿度、振动、粉尘等对它的测量精度和寿命都有影响,降低系统的可靠性。永磁同步电机的无速度传感器矢量控制不仅降低了系统成本,在恶劣环境下也能稳定运行,提高了系统的可靠性[3]。
基于上述情况,本文将主要研究功率单元级联型高压变频器的拓扑结构,并对高压永磁同步电机的数学模型进行推导,基于其数学模型研究无速度传感器矢量控制方法。
1 高压变频器拓扑结构设计
以新时达公司的AS800系列高压变频器为例介绍功率单元级联型高压变频器系统拓扑结构,如图1所示。它主要包括有前端的移相变压器、系统的主控部分、输入输出侧电流电压采集模块、输入输出IO模块、模拟量输入输出模块、光纤通信模块、现场总线模块和人机界面等9大模块[2]。其中,移相变压器通过降压和移相后通过二次绕组输出给功率单元供电,实现输入电压的多重化,提高了网侧输入功率因数,可达到0.96以上,THD小于3%。功率单元部分为高压变频器的重要组成部分,它由多个互相独立的低压690 V输入的功率单元串联组成。每个功率单元硬件、拓扑完全一致,形成模块化,方便扩展,每相功率单元数可根据电压等级等需求进行扩展。高压变频器的每相电压由多个低压功率单元的输出电压相互串联叠加而成,串联各单元的载波之间互相错开一定电角度,实现多电平PWM,等效开关频率高,输出电压非常接近正弦波,每个电平幅值只有单元直流母线电压大小,du/dt很小,对电机绝缘没有影响。主控部分中,控制板通过通信接口、I/O接口以及人机界面等获得指令信号,并实时采集移相变压器输入侧和高压变频器逆变输出侧的电压和电流,输入到控制模块中,实现电机的各种控制算法的运算,并最终输出PWM占空比信号,经由光纤板给到各个功率单元中,控制H桥4个IGBT模块的通断,从而实现对电机的驱动控制。
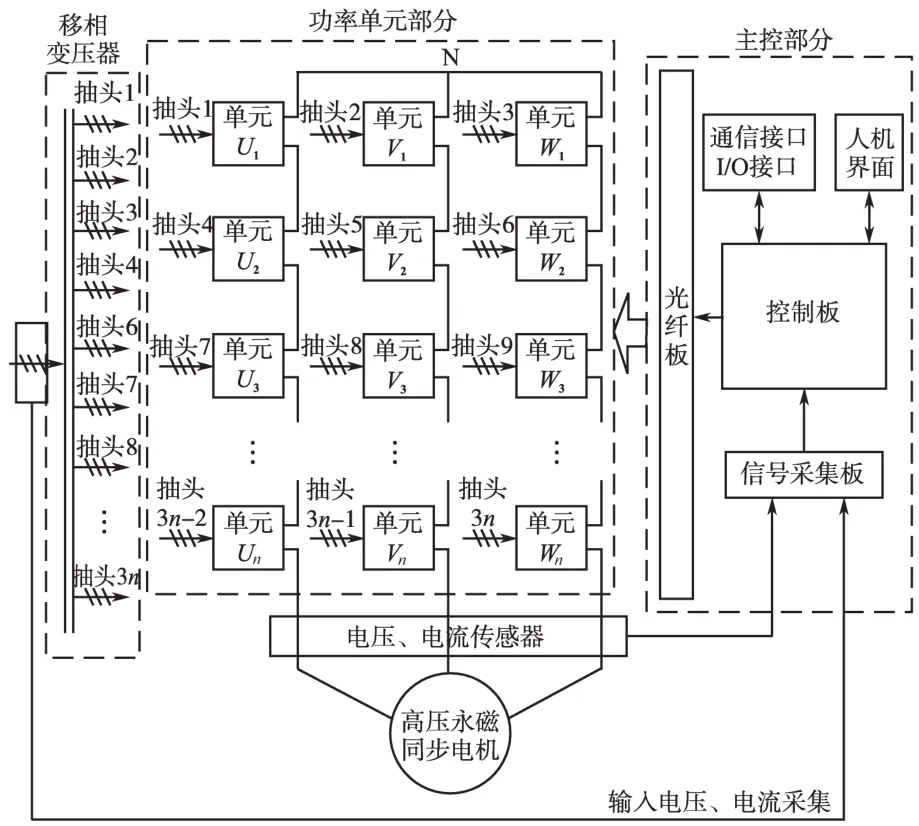
图1 单元级联型高压变频器电路拓扑结构Fig.1 Topology of power unit cascaded high voltage inverter system
功率单元是级联型高压变频器的重要组成部件,其拓扑结构如图2所示。

图2 功率单元拓扑结构Fig.2 Topology of power unit
图2中,输入端子In1~In3连接到移相变压器的二次绕组,然后通过二极管D1~D6进行整流,给后面的H桥以及功率单元供电,Q1~Q4构成H桥,Out1和Out2为功率单元的输出端子。单个功率单元通过移相变压器的二次绕组单独供电,由于采用多脉波二极管整流,大大降低了网侧电流的谐波含量,提高了输入功率因数。
2 高压永磁同步电机开环矢量控制系统设计
2.1永磁同步电机数学模型
首先,假设永磁同步电机是三相对称的,铁心为线性非饱和,且不计涡流和磁滞损耗。根据以上假设在同步旋转d-q坐标轴系下,永磁同步电机电压方程为

式中:isd,isq,Vsd,Vsq分别为d,q轴的定子电流和电压;Rs为定子电阻;ωe为同步旋转角频率;Ψd,Ψq为d,q轴的定子磁链。Ψd,Ψq可表示为

式中:Ld,Lq分别为d,q轴电感;Ψm为永磁体磁链。
当电机凸极率为1,即隐极式电机时,有Ld=Lq。电机的转矩可表示为[4]

式中:pn为电机极对数。
2.2转速与磁链观测器设计
根据永磁同步电机的数学模型式(1)~式(4)可知,电机定子磁链可根据下式进行观测:


式中:上标“^”表示观测值;k为电流误差反馈增益。
d,q轴电流的观测值可根据下式得到:

此时,电机转子角速度可根据下式得到[5]:

根据转子角频率的观测值积分可得到转子磁链角度,如下所示:

式中:θ0为转子磁链的初始角度。
高压永磁同步电机的开环矢量控制原理框图如图3所示。输出电压指令u*α和u*β经过SVPWM调制后输出三相占空比SA~SC,然后在FPGA中通过载波移相处理输出每个单元的H桥驱动信号控制功率单元的输出,从而实现电机的控制。

图3 高压永磁同步电机开环矢量控制原理框图Fig.3 Diagram of the speed sensorless vector control system of high voltage PMSM
3 实验验证
通过710 kW高压永磁同步电机能量互馈实验平台,对此方法的有效性进行验证。实验平台如图4所示。其中,电机1作为被试电机,工作在无速度传感器矢量控制模式下,采用本文提出的高压永磁同步电机开环矢量控制方法对转速进行观测,实现速度闭环控制。电机2作为陪试电机,与电机1同轴连接,工作在速度开环的转矩控制模式下。通过改变陪试电机的转矩电流给定值调节其输出转矩,从而改变被试电机的负载转矩。实验所用异步电机1和电机2的额定参数为:Pe=710 kW,Ue=6 000 V,fe=50 Hz,Ie=80.8 A,Nr= 1 500 r/min,pn=2。电机1参数为:Rs=0.956 Ω,Ld= 67.85 mH,Lq=91.44 mH。采用STM32F103 ARM芯片来实现控制算法,PWM调制频率为2 kHz。

图4 电机对拖加载测试平台Fig.4 Experimental platform
电机采用新时达的AS800 1 800 kW高压变频器驱动,如图5所示,其分为移相变压器柜、控制柜和逆变器柜。其中1个H桥功率单元采用模块化设计,非常方便扩展和批量生产。

图5 新时达AS800高压变频器Fig.5 High voltage inverter of STEP AS800
采用5单元级联型高压变频器,其输出相电压波形如图6所示。图6中波形为在移相变压器输入侧接三相380 V时,高压变频器的输出电压波形,其中,uun和uvn分别为U相和V相的输出相电压。从图6中可知,输出电压波形非常接近正弦波,电压谐波含量小。

图6 输出电压波形(5单元级联)Fig.6 Waveforms of output voltage(5 power units)
加载实验波形如图7所示。图7中分别给出了转矩电流分量isq、电机转速nr以及定子电流is波形。电机从空载加到额定负载时间大约为0.67 s,在加载过程中,电机运行平稳。

图7 加载实验波形(isq,nr,is)Fig.7 Experimental waveforms with load on(isq,nr,is)
图8中给出了在加载过程中电机的观测速度nr,est、采样速度nr,meas以及定子电流is。从波形可知,在稳态以及加载过程中,观测速度与电机实际速度吻合得非常好,观测误差在0.3%以内。

图8 加载实验波形(nr,est,nr,meas,is)Fig.8 Experimental waveforms with load on(nr,est,nr,meas,is)
4 结论
本文对H桥级联型高压变频器的硬件拓扑结构进行了分析,同时对高压永磁同步电机的开环矢量控制方法进行了研究,并通过实验对文中的方法进行了验证。
[1] 朱思国.6 kV-900 kW功率单元级联型高压变频器的研制[D].湖南:湖南大学,2007.
[2] 李兴鹤,王淑贤,马瑞侠,等.基于Matlab的级联型高压变频器VF控制仿真平台研究[J].大功率交流技术,2013 (5):1-7.
[3] 吴春华,黄建明,刘军.用于风机水泵的永磁同步电机无传感器矢量控制系统[J].电工电能新技术,2011,30(1):12-15.
[4] 郝雯娟,邓智泉,王晓琳.基于增强型自适应观测器的永磁同步电机无速度传感器[J].电工技术学报,2009,24(3):41-46.
[5]Piipo A,Luomi J.Adaptive Observer Combined with HF Signal Injection for Sensorless Control of PMSM Drives[C]// IEEE International Conference on Electric Machines and Drives, 2005,2:674-681.
Open-loop Vector Control System Design of High Voltage Permanent Magnetic Synchronous Motor
CHEN Wei,JIN Xinhai,HU Zhitao
(Shanghai STEP Electric Corporation,Shanghai 201801,China)
The open-loop vector contro(lOLVC)of high voltage permanent magnetic synchronous motor(PMSM)was researched.The hardware topology of H-bridge power unit cascaded high voltage inverter was analyzed.In addition,based on the math model of the high voltage PMSM,a open-loop vector control method of PMSM was given out.And the effectiveness of this OLVC method was verified by the experiments.
H-bridge power unit cascaded high voltage inverter;high voltage permanent magnetic synchronous motor(HV PMSM);open-loop vector control(OLVC)
TM351
A
2015-09-10
国家科技支撑计划,大功率电液器件及精密传动件关键技术研究与应用示范(2014BAF08B00)
陈伟(1983-),男,博士,Email:cwmailcn@163.com
猜你喜欢
电气电子教学学报(2022年3期)2022-07-30
核安全(2022年3期)2022-06-29
防爆电机(2022年3期)2022-06-17
燃料化学学报(2022年5期)2022-05-30
防爆电机(2021年2期)2021-06-09
防爆电机(2020年6期)2020-12-14
系统工程与电子技术(2016年2期)2016-04-16
电测与仪表(2016年8期)2016-04-15
电测与仪表(2016年24期)2016-04-12
海军航空大学学报(2015年1期)2015-11-11
