欠驱动水面模型船航向保持控制仿真平台
2016-10-12 01:32,,,4,
中国航海 2016年4期
, , ,4,
(1.武汉理工大学 ITS智能交通系统研究中心, 武汉 430063; 2.武汉理工大学 能源与动力工程学院, 武汉 430063; 3.国家水运安全工程技术研究中心, 武汉 430063; 4.武汉理工大学 物流工程学院, 武汉 430063)
欠驱动水面模型船航向保持控制仿真平台
柳晨光1,2,3,初秀民1,3,欧阳雪1,3,4,谢朔1,2,3
(1.武汉理工大学ITS智能交通系统研究中心,武汉430063; 2.武汉理工大学能源与动力工程学院,武汉430063; 3.国家水运安全工程技术研究中心,武汉430063; 4.武汉理工大学物流工程学院,武汉430063)
考虑到计算机仿真、半实物仿真及实船研究的不足,提出基于欠驱动水面模型船的航向保持控制仿真平台。该平台由模型船、航向与航速感知系统、航向保持控制器及远程控制与监测系统等4部分组成。介绍航向控制仿真平台各部分的组成和相互关系,研究模型船航向与航速感知系统的实现方法,分析航向保持控制器的工作原理,提出Nomoto响应模型的参数辨识方法及基于PID的航向保持控制和航速保持方法。在实验室环境下对仿真平台进行测试,并分析模型参数辨识和航向保持结果,试验结果表明平台能满足航向保持控制研究需求。
船舶工程;航向保持;运动控制;模型船;参数辨识;仿真平台
Abstract: Considering that the computer simulation, hardware-in-the-loop simulation or full scale ship are inconvenient or costly, a course keeping control simulation platform based on an underactuated surface model ship is proposed. This platform is composed of four parts: the model ship, the heading and speed perception system, the course keeping controller, and the remote control and monitoring system. The composition of each part and the relationship between these parts are set forth. The implementation of course and speed perception system is designed; the working principle of course keeping controller is analyzed; and the parameter identification of Nomoto response model and the PID-based course-speed keeping control stratages are put forward. The simulation platform is tested in the laboratory conditions. The test results of parameter identification and course keeping are analyzed, which shows that the platform can meet the requirements of course keeping control research.
Keywords: ship engineering; course keeping; motion control; model ship; parameter identification; simulation platform
为尽快到达目的港和减少燃油消耗,使船舶以一定的速度直线航行是航向保持控制领域研究的主要内容之一。[1-2]由于船舶运动具有大惯性、大时滞和非线性等特性,运动模型参数又与航行工况(包括载重量、航速及船型等)密切相关,目前自动舵还很难实现自适应控制,因此有必要进一步研究船舶航向保持控制问题。[3]
考虑到成本和可控性等因素,常通过仿真来研究此类问题。航向保持控制仿真研究一般有计算机仿真、半实物仿真和模型船仿真等3种方式。
1)计算机仿真完全基于计算机平台进行,系统模型、输入和输出均由计算机生成。[4]
2)半实物仿真又称硬件在回路仿真,在条件允许的情况下尽可能地在仿真系统中接入实物,以取代相应部分的数学模型,这样更接近实际情况,得到的信息更确切。[5]但是,该方式仍无法避免某些数据需依靠计算机仿真来生成。
3)模型船仿真以与真实船的运动特性几乎相同的模型船为对象来研究船舶运动控制等问题,仿真过程中所设计的运动控制器只需调整相应参数即可应用于真实船,可避免模型不匹配、控制实时性难以保证和鲁棒性不强等问题。
考虑到目前绝大多数船舶没有侧推器,是以欠驱动方式航行的,提出一种以航向保持控制为研究目标、以欠驱动水面模型船为研究对象的运动仿真平台。首先对仿真平台的组成和结构进行介绍;然后具体描述航向与航速感知系统实现方法;接着从船舶运动模型建立、基于最小二乘法参数辨识方法、基于PID的航速保持和航向保持方法研究等方面分析航向保持控制器的实现过程;最后测试仿真平台的性能,并分析试验结果。
1 平台结构
欠驱动水面模型船航向保持控制仿真平台由模型船、航向与航速感知系统、航向保持控制器及远程控制与监测系统等4部分组成,其结构见图1。
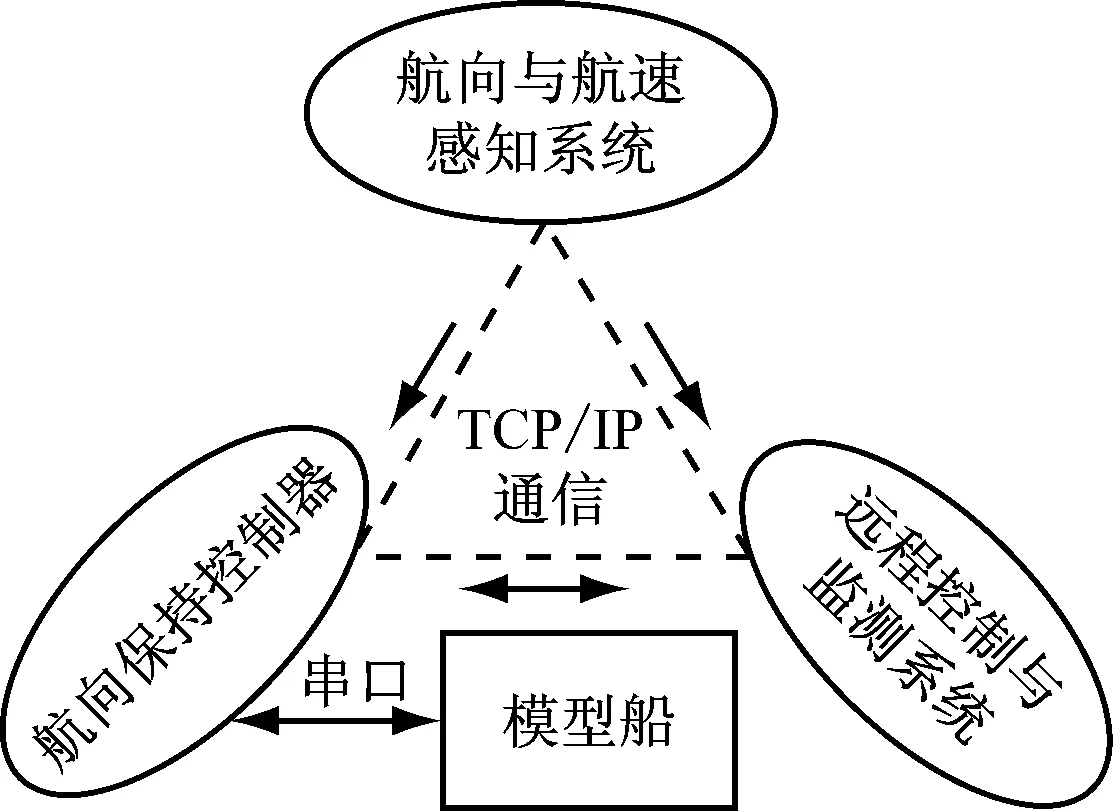
图1 欠驱动水面模型船航向保持控制仿真平台结构
1.1 模型船
模型船是该平台的控制对象,装有小型船载计算机、驱动电路板和传感器等,其中:小型船载计算机是整个船舶运动控制的“指挥官”,航向保持控制器就运行在该计算机上;驱动电路板可通过串口与船载计算机通信,用于传感器数据处理、指令解析和执行机构(螺旋桨和舵机)控制;传感器主要包括光电编码器、超声波传感器和无线通信模块等。
1.2 航向与航速感知系统
该平台是采用闭环控制策略进行航向保持控制的,因此有必要实时获取船舶航向;在控制过程中,为保持航速不变,有必要实时获取船舶航速。该系统通过采用单目视觉定位方法为航向保持控制提供实时的航向和航速数据。
1.3 航向保持控制器
航向保持控制器接收到船舶航向与航速数据之后,根据航向保持控制算法计算得到舵角控制指令,进而控制舵机执行舵角操作;根据航速控制算法计算得到螺旋桨控制指令,进而维持船舶航速不变。
1.4 远程控制与监测系统
船舶航向保持控制过程中的航向、航速、舵角及螺旋桨转速等数据会实时发送至该系统,实现船舶航行状态参数的实时监测及航向、舵角、螺旋桨转速等数据的实时存储,供后续研究分析使用。同时,遇到紧急情况时该系统可人工远程操控船舶,以保证其安全航行。该系统是基于WIFI无线网络通过Windows远程访问实现模型船的控制和监测的。
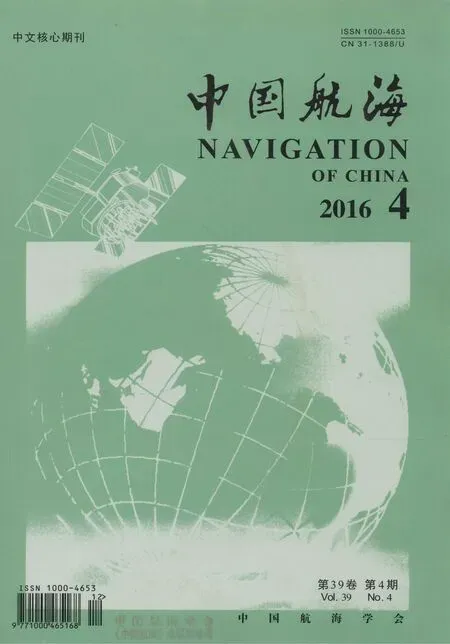
图2为平台各子系统的组成及相互间的关系。

图2 平台各子系统的组成及相互间的关系
2 航向与航速感知系统
感知航向和航速是进行航向保持控制的基础。由于模型船尺寸较小,因此为实现航向的精准控制,对航向和航速的精度有较高的要求。需指出,船舶航向保持控制中的“航向”通常是指“艏向”。[6]在真实船舶中,常采用磁罗经或陀螺罗经来获取实时航向,但磁罗经易受外界磁力的干扰,陀螺罗经易受航速、冲击及电源不稳等因素影响,因此不适合应用在模型船上。在船舶航向保持控制过程中,应尽量保持航速不变,但受风、浪、流及操舵的影响,航速会发生变化,因此有必要实时获取航速,将其作为反馈来保持航速基本不变。对于对航速精度要求较高的场合,常采用全球卫星导航系统差分定位及全球卫星导航系统与惯性导航融合定位的方式获取航速。但是,差分定位因成本较高、差分接收机质量大而很难在模型船上使用。融合定位成本也较高,且定位误差会积累,也不适用于模型船。[7-8]鉴于此,提出一种基于单目视觉的水面船舶航向与航速感知系统,系统结构见图3。
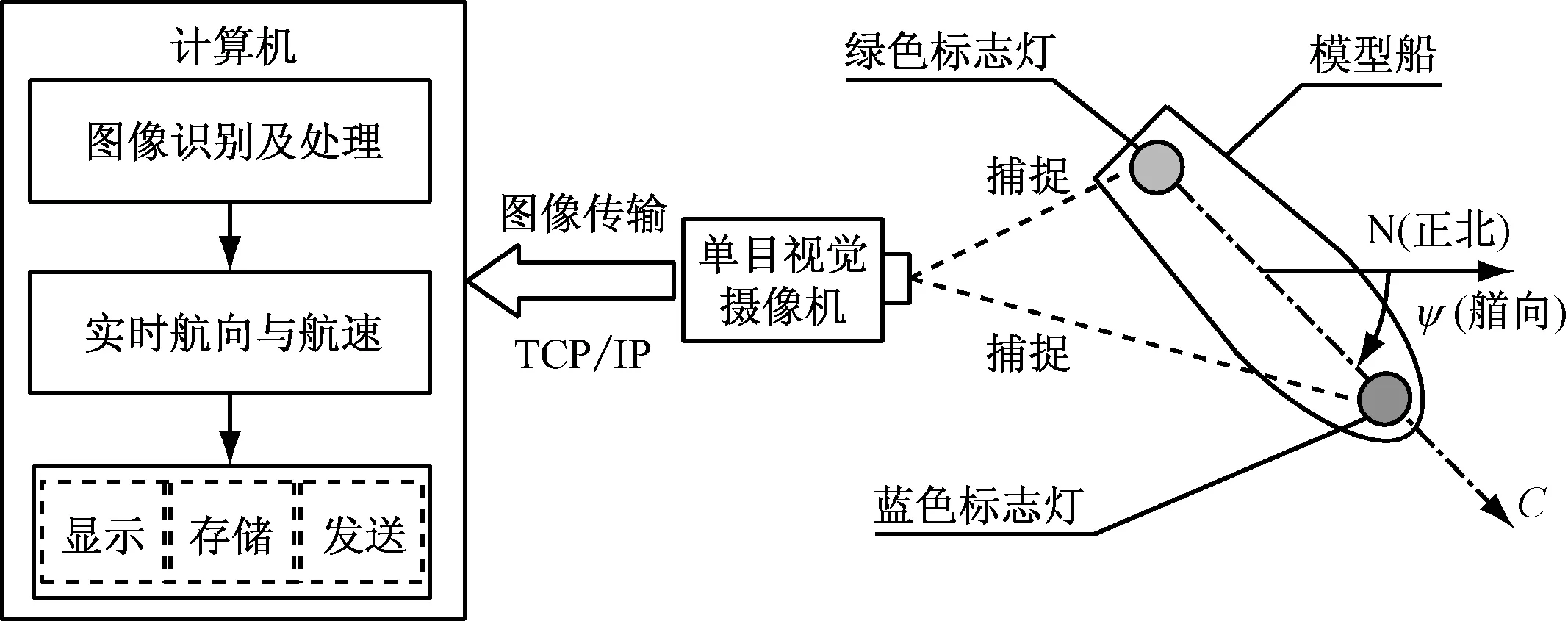
图3 航向与航速感知系统结构
不同于一般的单目视觉定位系统,该系统旨在实时获取模型船的航向角和航速。单目视觉摄像机获取船舶航向与航速的基本原理为:
1)根据标志灯颜色特征、封闭轮廓面积特征及船舶航速特征分别识别船舶上的蓝色和绿色标志灯,得到2个标志灯在图像坐标中的位置,经过坐标转换分别确定2个标志灯的真实位置;以2个标志灯的中点作为船舶重心,根据单位时间内船舶的位移计算出船舶航速。
2)由于2个标志灯可分别进行识别,因此绿色标志灯指向蓝色标志灯的矢量与正北的夹角即为船舶航向角(0°~360°)。
3)获取的航向与航速能通过WIFI实时发送至模型船主机,为模型船航向保持控制提供反馈。
4)航向与航速数据实时显示在计算机上,并存储至数据库中。
3 航向保持控制器
该平台的航向保持控制器通过控制舵角使船舶按照预设的航向航行;通过控制螺旋桨的转速使船舶航速保持不变;通过紧急避碰模块防止船舶碰撞。船舶避碰是一个很复杂的过程,涉及障碍物感知、路径规划和航迹控制等。这里的紧急避碰仅指紧急情况下的应急控制。航向保持控制的输入为预设航向与航速,反馈输入为实时航向与航速,输出为舵角,控制模型为Nomoto一阶线性模型。航向保持控制器工作原理见图4。
航向保持控制器运行于上位机,通过TCP/IP通信方式与航向与航速感知系统和远程控制与监测系统通信,通过串口通信方式与驱动电路板通信;驱动电路板可控制舵机和螺旋桨。航向保持控制器接收来自于航向与航速感知系统的模型船实时航向和航速,根据设定航向与感知航向的偏差,基于航向保持控制模型给出下一时刻舵角的输出值;根据设定航速与感知航速的偏差,基于航速保持模型确定螺旋桨转速的输出值。舵角和螺旋桨转速控制输出值转换为指令格式,并通过串口收发器发送至驱动电路板;电路板上的微处理器对指令进行解析,并控制舵机和螺旋桨。驱动电路板上配置的光电编码器和超声波测距仪可分别测量螺旋桨的转速及模型船与前后障碍物的距离,将这些数据转换为报文后通过电路板串口发送至上位机;上位机对这些数据进行解析后为航速保持控制器和紧急避碰模块提供数据支持。远程控制与监测系统通过TCP/IP远程访问上位机,能获取航向保持控制过程中的各种参数,并可在需要时进行远程操控。
图4 航向保持控制器工作原理
为实现航速和航向的精确控制,有必要对模型参数进行精确辨识,在获取模型参数的基础上完成航速保持和航向保持控制。
3.1 一阶K-T模型
日本学者野本谦作基于船舶操纵线性方程,从控制工程的观点研究船舶操纵性问题,建立船舶操纵响应方程,提出表征船舶操纵性的指数。[9]艏摇响应线性方程为
(1)
式(1)中:δ为操舵角;r为转艏角速度;K,T1,T2,T3为操纵性指数。式(1)称作二阶线性K-T方程。此后野本谦作又提出,在操舵不是很频繁的情况下,式(1)可用式(2)近似代替。

(2)

(3)
将式(3)转换为传递函数形式[10],可表示为
(4)
3.2 参数辨识
为确定该平台模型船的航向运动特性,需确定式(4)中K和T的值。该仿真平台采用最小二乘法对Nomoto一阶K-T模型进行参数辨识。参数辨识的流程为:
1)通过Z型试验获取参数辨识所需的输入、输出数据;
2)对获取的数据进行处理;
3)利用最小二乘法辨识模型参数;
4)利用已辨识的K和T进行操纵性预报,验证参数辨识的正确性。
3.3 航速保持
航速保持是指模型船航行过程中,在风、浪、流及操舵的影响下,通过控制螺旋桨转速来保持航速不变。该平台采用PID方法建立航速保持模型,模型输入为航速偏差,模型输出为螺旋桨转速增量。
3.4 航向保持控制
目前已有神经网络、滑模控制、模糊控制和专家系统等多种控制方法被应用或被尝试应用到船舶航向保持控制中,且已取得一些成果;但考虑到上述方法在可靠性和鲁棒性等方面存在不足,在真实船舶航向保持控制中很少应用这些方法。[1,11-12]该平台提供与真实船舶控制几乎相同的试验环境,能为一些高级或智能算法的实际应用提供测试平台。为验证该平台的航向保持控制性能,选择最易实现的PID对船舶航向进行跟踪控制。
4 试验测试及分析
为验证模型船航向保持控制仿真平台的航向保持控制性能,进行水池环境下的航向跟踪试验,试验环境见图5。水池大小为2 m×5 m,模型船尺寸为92.5 cm×23.5 cm,模型船采用单桨单舵方式控制。
4.1 Nomoto模型参数辨识
模型船Z型模型参数辨识结果见图6。根据图6中的数据,利用最小二乘法辨识出式(4)中的参数K=1.05,T=0.72。利用已辨识出的K和T对船舶Z型试验进行预报,可看出预报结果与真实试验数据比较接近,说明参数辨识结果是可靠的。
4.2 航向跟踪试验
航向跟踪是使模型船按照预设的航向航行,且在航行过程中通过不断控制舵角保持航向不变。经标定,该平台航向跟踪试验PID控制参数为:kP1=10;kI1=0;kD1=6。预设跟踪航向为180°,起始航向设为150°,航向跟踪试验结果见图7。由图7可知,经过不断调整舵角,船舶航向逐渐稳定至目标航向。

图5 试验环境

图6 一阶K-T模型参数辨识结果
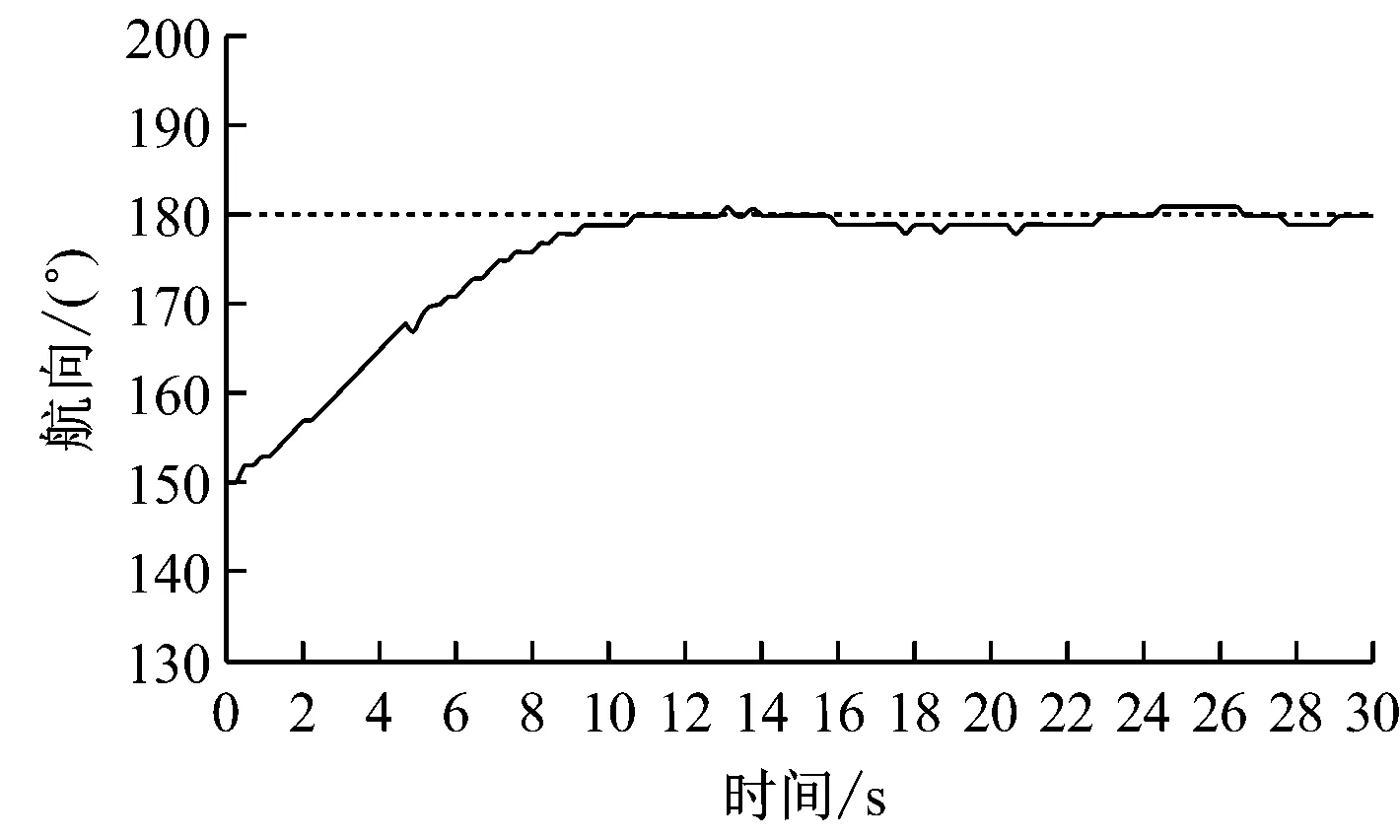
a) 航向随时间变化
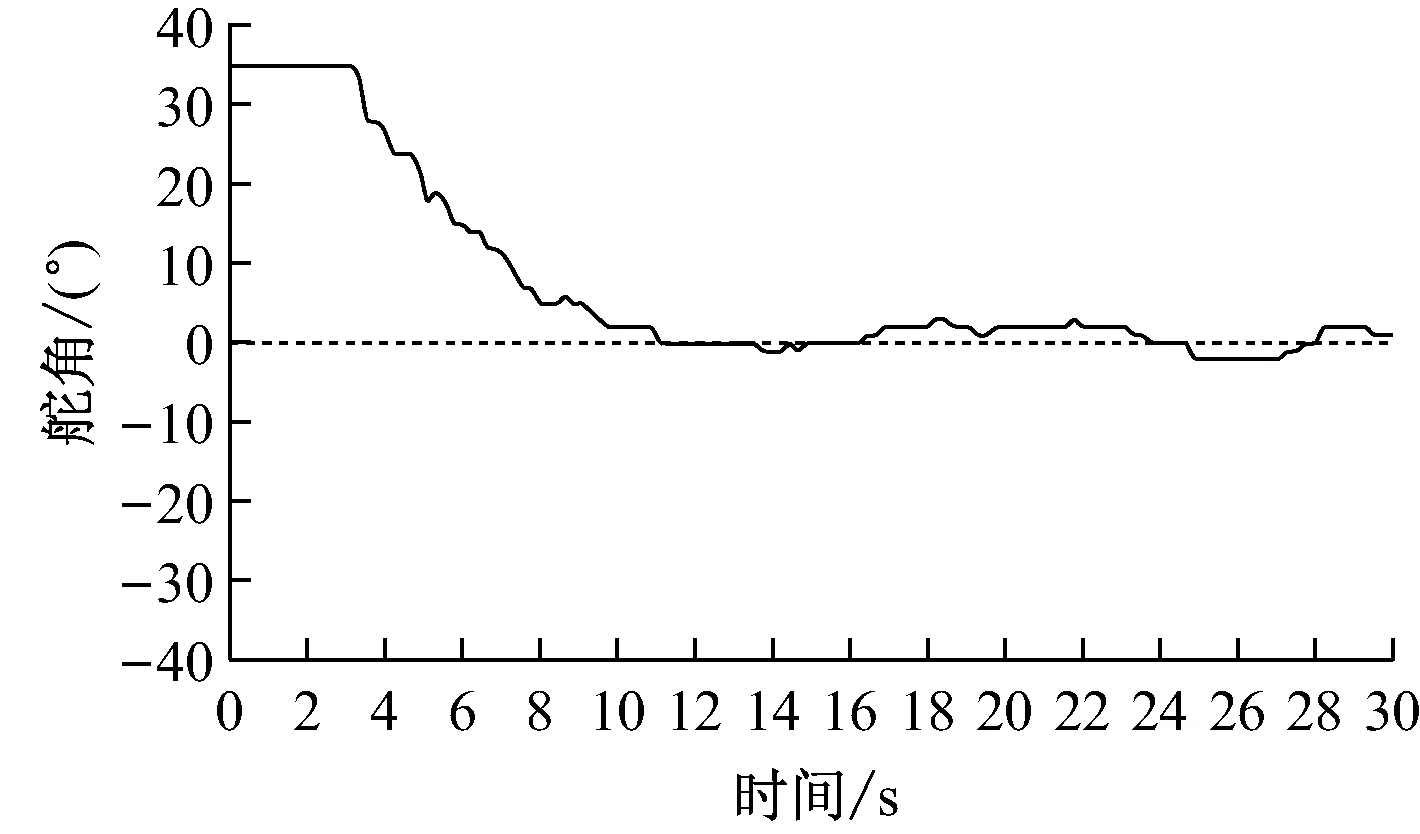
b) 舵角随时间变化
4.3 航速保持模型
经标定,适合该平台的航速保持PID参数为:kP2=0.005;kI2=0;kD2=0.003。在上述试验环境下进行航速保持跟踪试验,通过控制螺旋桨的转速使模型船从初始航速0 m/s逐渐控制在目标航速0.4 m/s左右。航速保持控制试验结果见图8。
4.4 远程控制与监测系统
在模型船航行时,远程控制与监测系统能访问船载计算机,观测模型船的实时运行状态,并能在必要时通过人工方式控制模型船。远程控制与监测系统运行界面见图9。
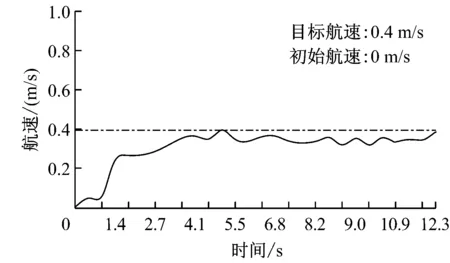
a) 航速随时间变化
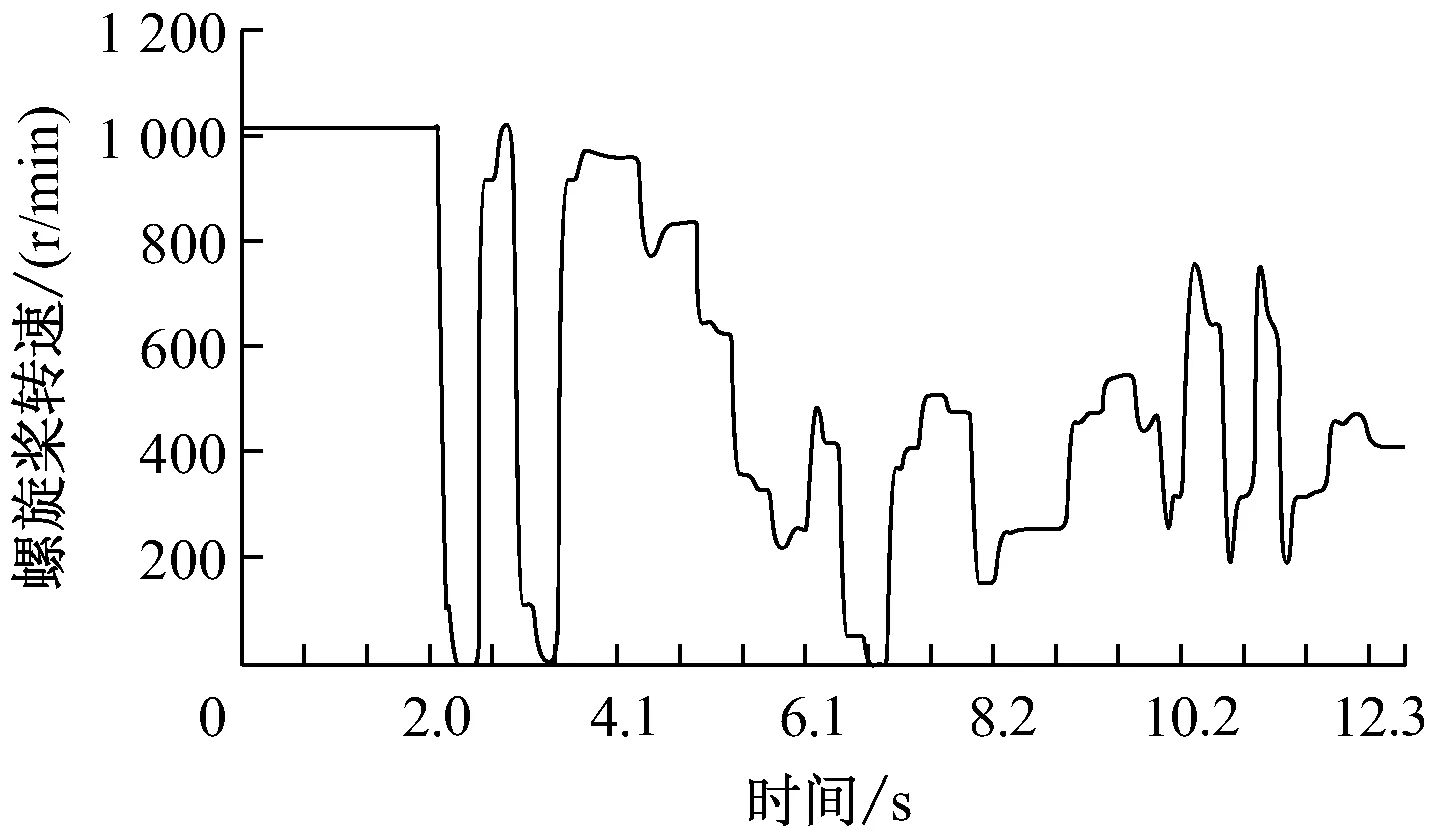
b) 螺旋桨转速随时间变化
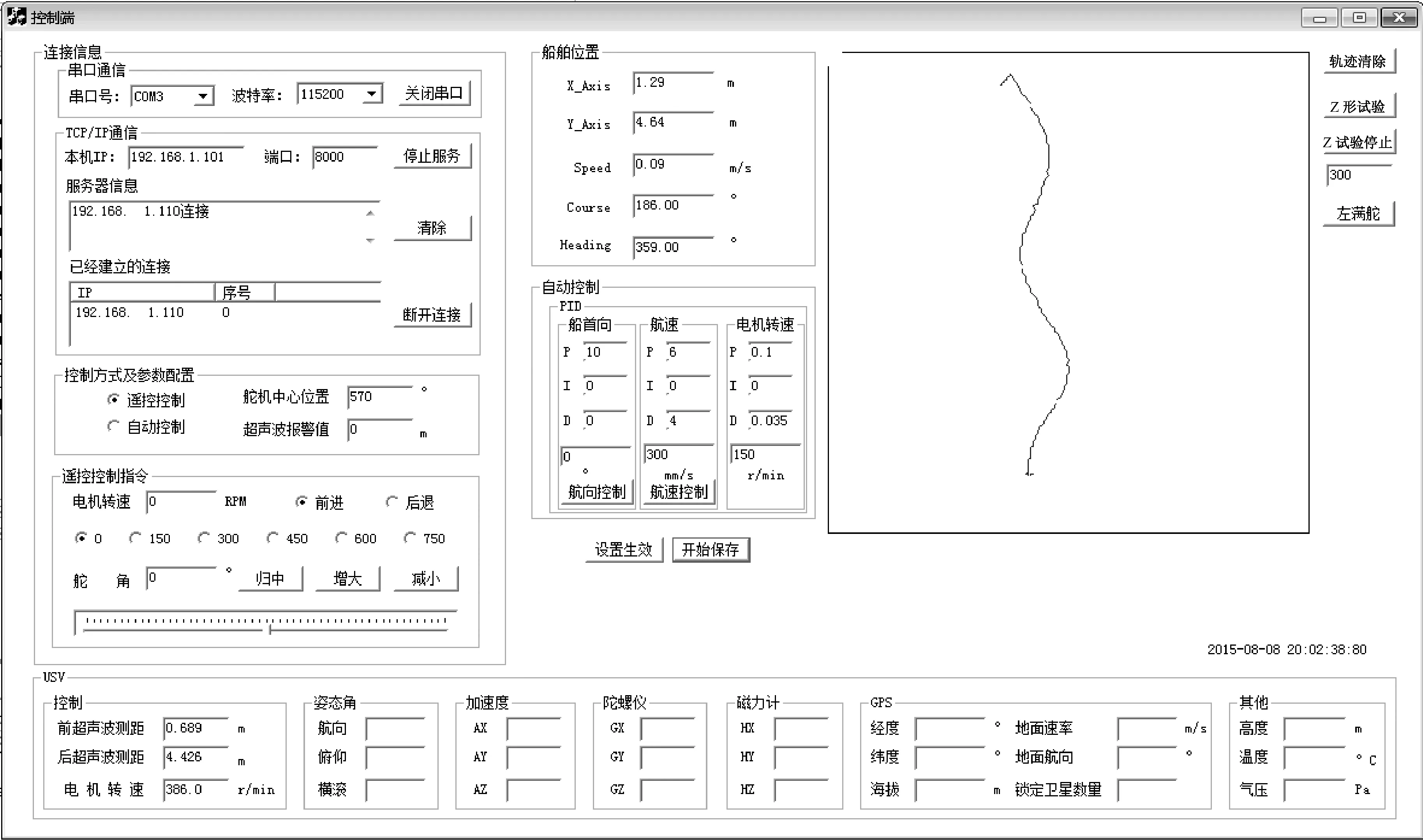
图9 远程控制与监测系统运行界面
5 结束语
构建基于欠驱动水面模型船的航向保持控制仿真平台,并在试验水池环境下验证平台的性能。建立远程控制与监测系统,实现模型船人工控制及控制过程中各项数据的远程查看和存储。建立基于单目视觉的航向与航速感知系统,提出基于最小二乘法的船舶航向保持控制一阶K-T模型参数辨识方法,并通过Z型试验验证辨识方法的有效性。提出基于PID的船舶航向与航速保持方法,在试验水池环境下测试航向跟踪和航速保持性能。
该平台具有船舶定位精度高、操作简便和系统可控等优点,不仅能完成航向保持控制研究,还能为今后开展船舶轨迹跟踪控制、航迹控制及鲁棒控制等提供测试平台支持。
[1] 丁航成. 船舶航向智能PID控制算法研究[D]. 大连:大连海事大学, 2010.
[2] WITT N A J, SUTTON R, MILLER K M. Recent Technological Advances in the Control and Guidance of Ships[J]. Journal of Navigation, 1994, 47(2): 236-258.
[3] 徐国平,张显库. 基于网络的船舶航向保持控制仿真平台设计[J]. 中国航海,2015,38(1):1-3.
[4] 沈智鹏,杨杨,郭晨,等. 船舶运动控制硬件在环仿真系统的研究[J]. 系统仿真学报,2010,22(12):2838-2841.
[5] 刘延斌,金光. 半实物仿真技术的发展现状[J]. 光机电技术,2003(1): 27-32.
[6] 周娜. 基于单目视觉的摄像机定位技术研究[D]. 南京:南京航空航天大学,2007.
[7] 张显库. 用航向偏差的正弦函数驱动的自动舵控制算法[J]. 中国航海,2011,34(1):1-4.
[8] 金辉,胡福乔. 差分GPS定位技术在ITS中的应用[J]. 计算机工程,2002,28(10):200-202.
[9] 梁霄,李巍. 船舶操纵性与耐波性[M]. 大连:大连海事大学出版社,2012: 15-16.
[10] 张显库,王新屏. 关于船舶Nomoto模型的进一步思考[J]. 航海技术,2008(2):2-4.
[11] 卜仁祥,刘正江. 迭代滑模增量反馈及在船舶航向控制中的应用[J]. 哈尔滨工程大学学报,2007,28(3):68-272.

Simulation Platform for Course Keeping Control of Underactuated Surface Model Ships
LIUChenguang1,2,3,CHUXiumin1,3,OUYANGXue1,3,4,XIEShuo1,2,3
(1. Intelligent Transport System Research Center, Wuhan University of Technology, Wuhan 430063, China; 2. School of Energy and Power Engineering, Wuhan University of Technology, Wuhan 430063, China; 3. National Engineering Research Center for Water Transport Safety, Wuhan 430063, China; 4. School of Logistics Engineering, Wuhan University of Technology, Wuhan 430063, China)
1000-4653(2016)04-0001-05
U664.82;TP391.9
A
2016-07-15
湖北省自然科学基金(2015CFA111);交通运输部科技成果推广项目(2015326548030)
柳晨光(1988—),男,江西九江人,博士生,从事船舶智能化与运动控制研究。 E-mail: liuchenguang@whut.edu.cn
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
水上消防(2022年1期)2022-06-16
江苏船舶(2021年4期)2021-09-28
舰船科学技术(2021年8期)2021-09-18
新世纪智能(高一语文)(2021年3期)2021-07-16
海洋开发与管理(2020年2期)2020-09-10
舰船电子工程(2020年4期)2020-06-19
民用飞机设计与研究(2019年4期)2019-05-21
舰船科学技术(2018年7期)2018-07-25
电子制作(2017年24期)2017-02-02