基于AUV的波浪能发电技术研究现状与展望
2016-10-12 01:32,,,
中国航海 2016年4期
, , ,
(1.国家水运安全工程技术研究中心 可靠性工程研究所, 武汉 430063; 2.武汉理工大学 能源与动力工程学院, 武汉 430063; 3.船舶动力工程技术交通行业重点实验室, 武汉 430063)
基于AUV的波浪能发电技术研究现状与展望
孙涛1,2,3,赵江滨1,2,3,严新平1,2,3,许朋朋1,2,3
(1.国家水运安全工程技术研究中心可靠性工程研究所,武汉430063; 2.武汉理工大学能源与动力工程学院,武汉430063; 3.船舶动力工程技术交通行业重点实验室,武汉430063)
针对自主式水下潜器(Autonomous Underwater Vehicle,AUV)深远海作业的能源供给问题,提出应用波浪能的解决方案,总结波浪能发电应用于AUV中的研究现状,包括波浪能航行器随体发电及AUV波浪能水下坞站技术。对AUV波浪能发电所面临的挑战进行探讨与展望。通过对与波浪能发电技术相关的能量转换、存储、装置可靠性及控制技术等关键问题作进一步的研究,为波浪能在小型无人海洋航行器能源供给方面的研究提供有益的参考。
自主式水下潜器;能源供给;波浪能随体发电;AUV波浪能水下坞站
Abstract: The researches on application of wave power generation technologies for Autonomous Underwater Vehicle(AUV) is summarized and the feasibility of powering AUV is proposed with the technologies covering the wave energy aboard harvest and the wave-powered AUV docking station. The challenges of wave power generation for AUV are also discussed. It is concluded that the wave power generation technologies are not ready yet for AUV application, since key things such as conversion efficiency, energy storage, reliability and control technologies have not been researched sufficiently. This research wishes to stir up the interest in developing wave power generation technologies for AUV.
Keywords: AUV; energy supply; wave energy aboard harvest; wave-powered AUV docking station
自主式水下潜器(Autonomous Underwater Vehicle,AUV)等小型海洋航行器作为便捷、高效的海洋移动平台,在海洋资源勘探、水下军事侦察和远程设备监测等领域有着十分重要的战略意义,是海陆空天潜一体化监测网络的重要组成部分。
AUV的电力来源主要有一次性电池[1]、蓄电池[2-4]及燃料电池[5-6]等,只能为航行器提供短时间的电力供应[7]。有限的电力来源对航行器作业半径、航行速度、任务持续时间及负载设备承载能力等都有较大的限制。例如,美国军方研发的Bluefin-21型自主式水下航行器采用锂电池供电,在标准负载和3 kn航速下的续航能力仅25 h[8],在执行MH370搜寻任务时需频繁回收。当前,AUV进行长时间、远距离作业需定期回收电池充电,成本较高。
海洋波浪能作为一种储量丰富、分布广泛的可再生清洁能源,为解决AUV能源供应问题提供了一种可行的途径。据统计,目前全世界已有近万座小型波浪能发电装置[9]为航标灯、浮标等供电;大型波浪能发电装置近年来的研究发展也很快,典型的有英国的The Oyster波浪能发电装置[10]、Pelamis Wave Power公司的“pelamis”波能发电装置[11]、美国OPT公司的PowerBuoy[12]、丹麦的Wavedragon[13]及中国科学院广州能源所的鸭式波浪能发电装置[14]等。但是,目前对波浪能发电技术应用于AUV等小型无人海洋航行器中的研究还很少,其应用可归纳为以下2类:
1)航行器波浪能随体发电,即将波浪能发电装置直接安装在航行器上,利用波浪能发电装置实现电力需求的自给自足。
2)波浪能水下坞站,即建立基于波浪能发电装置的水下电力系统平台作为AUV的水下停靠点,对其进行充电,同时借助通信网络实现AUV与岸端的数据传输。
1 波浪能随体发电技术
小型海洋航行器装载波浪能发电装置可满足其自身作业的电力需求,解决单纯依靠蓄电池供电而续航能力不足的问题。
毛昭勇等[15]提出一种适用于水下航行器的由两级转换系统构成的海洋动能发电装置(见图1),主要包括波浪动能收集机构和电能转换机构。需要供电时,水下航行器可上浮至海面,在海浪的作用下产生晃动,利用具有较大转动惯量的晃动摆收集波浪晃动动能,带动永磁发电机发电,直接将海洋波浪动能转换为电能。该方式省掉了中间能量的传递环节,理论上可有效减小装置的结构体积、提高发电系统的转换效率。通过分析可知,其发电能力可基本满足无人潜水器(Unmanned Underwater Vehicle,UUV)探测设备的用电需求。[16]该装置尚未考虑晃动机构对发电装置本身的冲击及对航行器自身运动的影响。
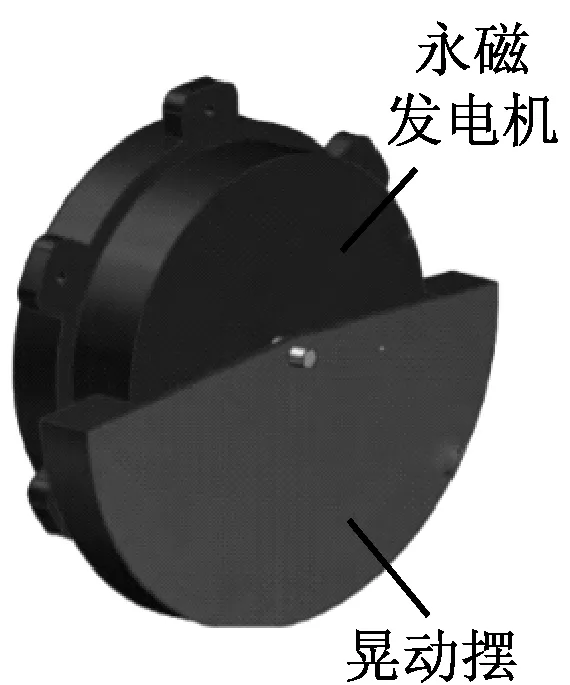
a) 海洋能收集机构 b) 电能转换机构
图1 海洋动能发电装置
赵江滨等[17]提出一种适用于小型海洋观测航行器的振动能量收集装置,在航行器外部两侧加装摆动水翼装置(类似于飞机机翼),通过传动轴与机体连接(见图2)。水翼随波浪起伏上下摆动(见图3)捕获波浪能,通过传动轴传递到内部传动装置,经增速齿轮机构带动发电机发电(见图4)。其内部装置考虑以下2种方案:
1)直接利用齿轮传动旋转发电。
2)基于质量块的振动,通过齿条传递到增速齿轮,该方案还考虑直线发电方式。
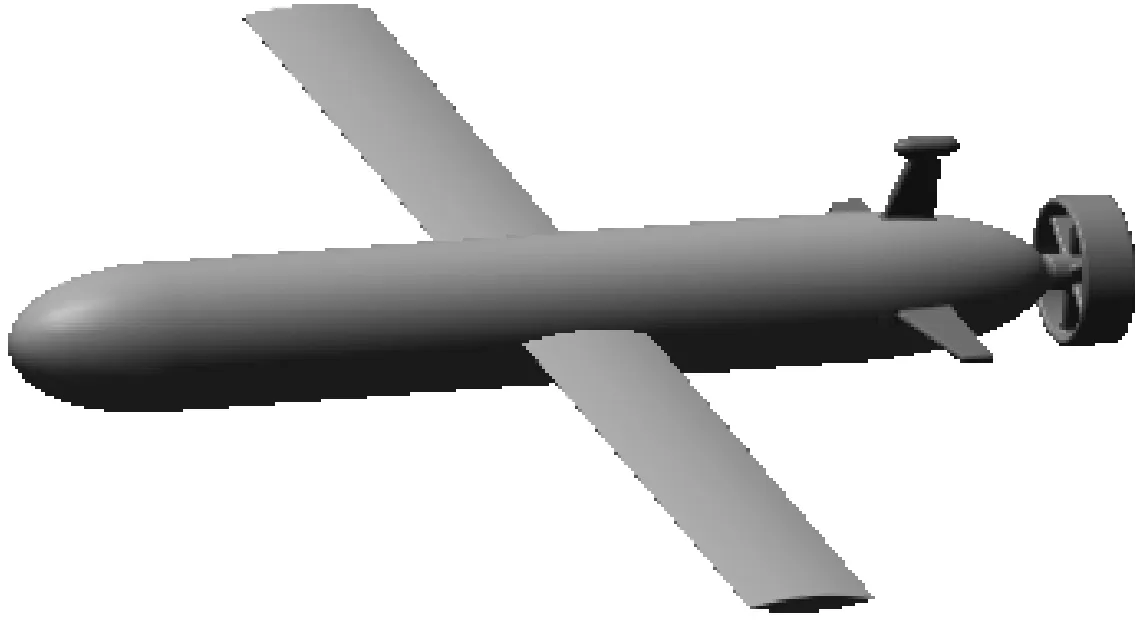
图2 航行器加装水翼
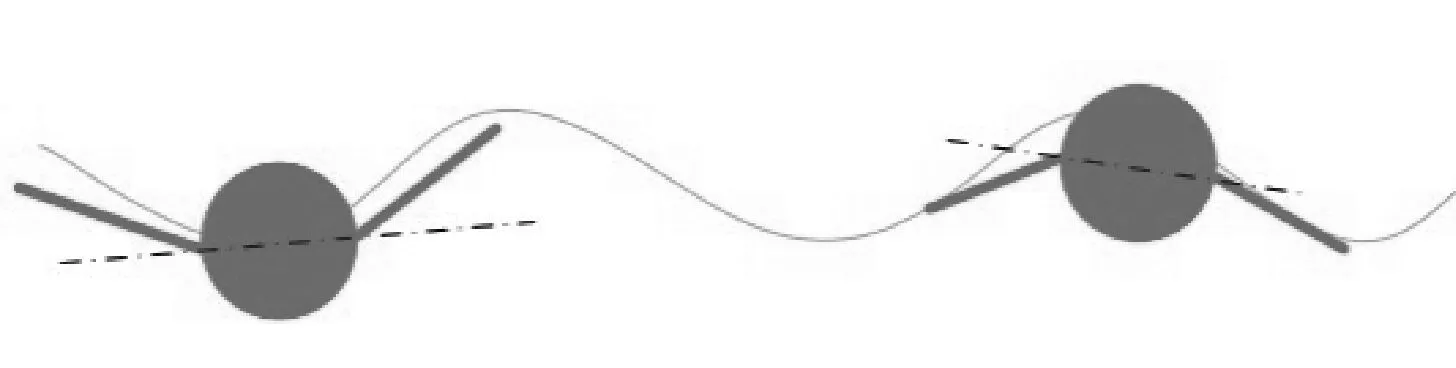
图3 航行器摆动水翼发电运动状态(尾视图)

图4 发电系统示意(单侧水翼)
此外,其外部水翼上还设置有襟翼装置,可将部分波浪作用力直接转换成一定的推动力。该设计力求为水下或水面航行器提供可用于推进的电力,实现水面或近水面取能、全水深航行的作业目标。
近年来,已有较多研究人员探索利用陀螺效应收集波浪能。BRACCO等[18-19]、SALCEDO等[20]及KANKI等[21-22]都对陀螺式波浪能转换装置进行过研究。陀螺因具有定轴性和进动性而在各个领域中都有广泛应用。在小型海洋航行器领域,TOWNSEND等[23-24]研究利用陀螺式波浪能发电系统为航行器提供电力,利用安装在AUV壳体内的惯性飞轮在波浪激励下的陀螺进动效应产生电力(见图5)。仿真分析结果表明,3 kg的陀螺式发电系统可提供5~10 W的发电能力。[23]以Delphin 2 AUV[25]为例,若要充满其30 Ah的机载蓄电池,需3~5 d的时间。
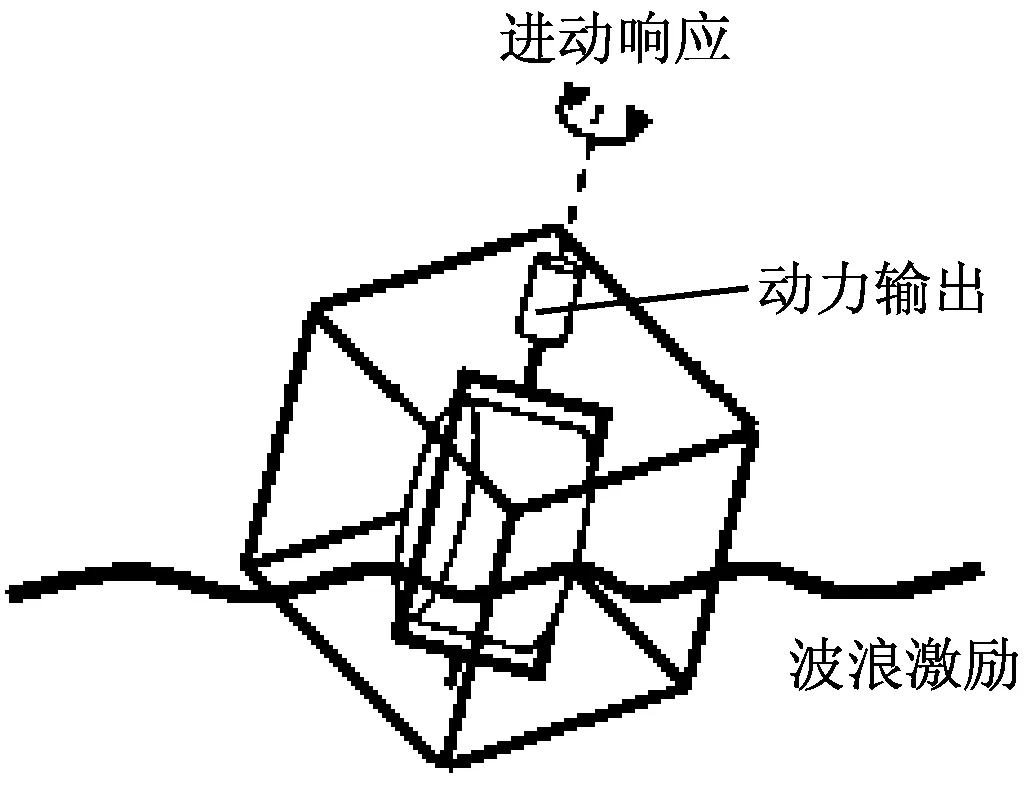
图5 陀螺式波浪能转换装置
2 AUV波浪能水下坞站
美国麻省理工学院的AUV实验室和伍兹霍尔海洋研究所及日本的川崎造船等研究机构都对AUV水下充电平台进行过研究,并建立有AUV水下充电系统[26-28],为AUV远程作业提供电力补给,同时进行AUV与平台之间的数据传输。利用这种电力补给平台时需铺设海底电缆引入岸电,系统复杂、成本较高。HAGERMAN[29]提出一种基于波浪能和一体式可再生燃料电池(Unitized Regenerative Fuel Cell,URFC)的AUV水下充电平台,利用浮子吸收波浪能作用于液压缸产生高压,通过逆渗透技术淡化海水,将脱盐后的海水供给URFC发电使用,为AUV机载电池供电。
近年来,随着波浪能发电技术不断发展,基于波浪能发电装置的AUV水下坞站的概念逐渐受到相关研究机构的重视。考虑利用独立于小型海洋航行器之外的波浪能发电装置建立服务于航行器的水下充电平台,为航行器深海、远海作业提供电力保障,同时实现AUV监测数据上传和命令脚本下载。
2008年,美国OPT(Ocean Power Technologies)公司自主研制的“PowerBuoy”系统[30]投入使用,该系统采用光纤通信和数据采集与监视控制系统(Supervisory Control And Data Acquisition,SCADA),通过铱星系统与地面通信,旨在为美国海军深海主动探测系统(DWADS)项目供电。随着PowerBuoy系统不断发展完善,在海上电能供应、AUV运作等领域均有着巨大的潜在应用价值,OPT公司希望通过该技术改变海洋油气产业结构,大力开发波浪能等清洁能源。PowerBuoy是一种波浪能转换设备(见图6),其主体部分是一个竖直柱体结构,下方是垂荡阻尼板,使柱体维持相对竖直和固定的状态;水面浮体随波浪的起伏相对柱体上下运动,通过柱体内部的机械系统转换为回转运动,带动内部发电机发电,供负载使用或通过海底电缆输送到其他海洋设备中。PowerBuoy的发电能力可观,APB-350可提供350 W的输出功率,PB40的平均输出功率达到15 kW。[12]该系统既可大规模部署,向陆地电网供电,还可作为“AUV车库”[31],用于为AUV充电及通过通信接口上传数据(见图7和图8)。显然,PowerBuoy利用波浪能持续发电可为AUV等水下移动平台提供持续的电力来源,并作为相对固定的AUV水下坞站兼水下通信平台传输数据。
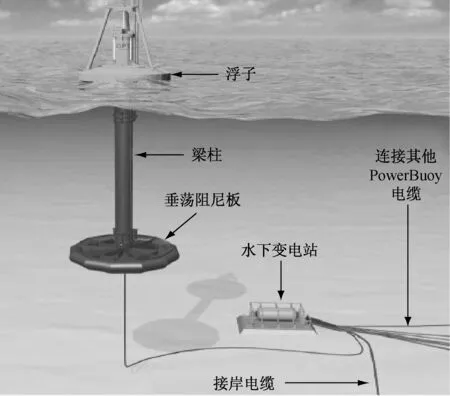
图6 PowerBuoy 系统

图7 PowerBuoy供能的水下“AUV车库”
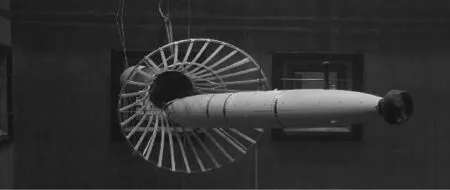
图8 AUV与水下坞站接口对接
美国蒙特雷湾水族馆研究所(Monterey Bay Aquarium Research Institute,MBARI)[34]设计一种由波浪能供电的能量浮标,其中:水面上是一个直径为2.5 m的浮子,吸收上下起伏的波浪运动产生的能量;水下30 m处悬挂一个5.5 m长、3 m宽的金属板;水面浮子和水下金属板之间连接一个大型活塞式液压缸(见图9)。由于波浪运动多发生在水面,而水下深度30 m处的金属板相对固定,因此水面浮子会随波浪的起伏带动活塞运动,将波浪能转换为液压能,通过液压电机驱动发电机发电。该能量浮标曾多次在美国加州蒙特雷湾部署,2011年底在实际试验中产生的电力达到400 W。MBARI的JIM BELLINGHAM和BRETT HOBSON等则继续进行HAMILTON的波浪能浮标项目研究,试图在此基础上建立可为AUV等移动平台供电的水下充电站系统。站内设计有可供AUV充电的“模拟码头”,当AUV感受到随身电池的电力不足时可自动驶入进行充电,以解决AUV电能供应问题。
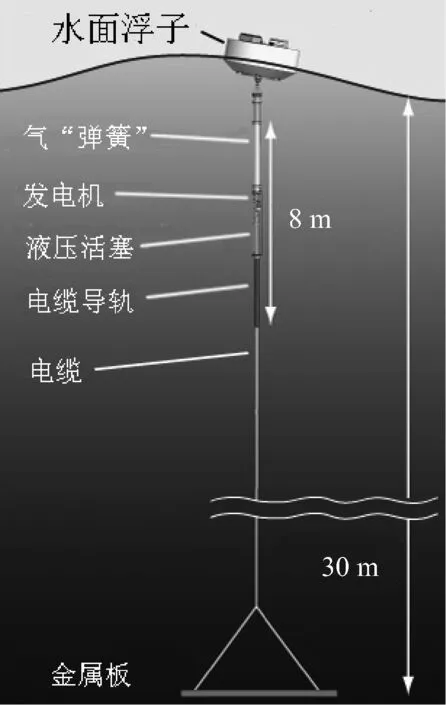
图9 MBARI波浪能浮标装置
基于波浪能的AUV水下坞站系统尚处于研究阶段,实现该项目无论是从技术上还是海洋环境上看都面临巨大挑战,但该方案为水下移动平台解决长航时、大航程、多任务的能量供应问题提供了一个可行的发展方向。
3 面临的挑战
AUV波浪能发电技术发展前景广阔,但要实现波浪能在小型无人海洋航行器上的广泛应用,仍面临很多挑战。
3.1 海洋波浪本身的特点
据美国能源机构估计,地球上潜在的波浪能大约有30亿kW。虽然波浪能的储量丰富,但能量分散、能流密度较低,导致波浪能发电设备效率不高。海浪是一种复杂的不规则波,频率很低,不易收集,所以无论是在波浪能直接推进方面还是在转换发电方面都有较大困难,不稳定性较大。目前已有的研究多采用试验用造波水池进行,波形规则、平稳,而海上波况复杂,波浪的功率受海水流速、风速及风向等多种因素影响难以达到室内试验的预期效果。
3.2 波浪能发电装置的转换效率
波浪能装置的发电能力是决定其应用的主要因素。当前已有的波浪能发电装置不论是机械式的还是气动式或液压式的,其转换效率都较低。面对极低的海洋波浪频率和有限的航行器内部空间,AUV波浪能随体发电装置将受到更大的限制,故其发电量小,尚不能满足推进功率的需求。因此,充分吸收波浪能、简化能量转换过程、降低能量传递损失、提高波能装置的转换效率是波浪能利用的关键。
3.3 波浪能发电系统的可靠性
海洋波浪不仅具有很大的动能,而且具有极强的破坏力,势必会对波浪能发电系统产生冲击,导致某些环节失效,故必须对缓冲储能技术进行研究,提高波浪能发电系统的可靠性及恶劣海况下的稳定性,延长系统使用寿命。对于AUV波浪能随体发电,还须考虑特定的能量转换机构可能与航行器机体产生的动力学耦合关系,在提高能量转换效率的同时降低对航行器机体运动性能的影响。
3.4 控制技术的研究
一般小型海洋航行器航行过程中受到随机波浪的外力扰动,重心和浮心不断变化,其控制系统模型本身就具有时变性、强祸合及高度非线性的特点,倘若再偶合波浪能转换装置,势必会增大航行器流体动力学参数的不确定性。为克服干扰,实现航行器平稳运行,将对控制系统的鲁棒性有更高的要求,会增大系统在线实时控制的难度。
3.5 储能系统的研究
波浪能发电系统输出电压的频率、相位及幅值是波动的,为保证航行器的用电需求稳定,提高系统的性能,并延长电池组的使用寿命,需研究波浪能发电系统的输出特性及蓄电池组均衡充电控制方法,优化航行器或AUV波浪能水下坞站电力系统能量的管理策略。
此外,确保波浪能发电系统的密封性及降低发电成本等也是推广利用AUV波浪能发电技术需要解决的难题。
4 结束语
虽然当前有很多应用于位置相对固定的航标、浮标等设备上的小型发电装置和岸式、离岸式大功率发电装置,但受限于小型海洋航行器本身体积、结构和运行方面的特点,波浪能随体发电的应用研究发展缓慢;基于波浪能的AUV水下坞站需要高成本、规模化建设,技术难度大,尚处于初步研究阶段。
尽管AUV波浪能发电技术尚不成熟,但其具有巨大的应用潜力和广阔的发展空间。在大力开发利用新型能源的时代背景下和AUV智能化、群体化及深远海作业的发展趋势下,应加大AUV波浪能发电技术的研究力度,并结合现代化信息通信技术,为实现海洋三维立体监测网络的发展创造条件。
[1] GRIFFITHS G.Ocean Science Applications for Autonomous Underwater Vehicles-the Work Plan for Autosub-1 for 1997—2000 and Beyond[D].Southampton: The Unmanned Underwater Vehicle Showcase,1997.
[2] DOUGHERTY F,SHERMAN T,WOOLWEAVER G,et al.An Autonomous Underwater Vehicle(AUV) Flight Control System Using Sliding Mode Control[C]//OC-EANS’88.A Partnership of Marine Interests.Proceedings.IEEE,1988:1265-1270.
[3] LIU T,XU Q,WANG H,et al."CR-02" 6 000 m AUV Hull Structure Systems[J].Journal of Ship Mechanics,2002,6(6):114-119.
[4] HASVOLD Ø,STØRKERSEN N J,FORSETH S,et al.Power Sources for Autonomous Underwater Vehicles[J].Journal of Power Sources,2006,162(2):935-942.
[5] MAEDA T,ISHIGURO S,YOKOYAMA K,et al.Development of Fuel Cell AUV "URASHIMA"[J].Mitsubishi Heavy Industries Technical Review,2004,41(6):344-347.
[6] TSUKIOKA S,AOKI T,TAMURA K,et al.Development of a Long Range Autonomous Underwater Vehicle AUV-EX1[C]//Proceedings of the 2000 International Symposium on.IEEE,2000:254-258.
[7] GRIFFITHS G,JAMIESON J,MITCHELL S,et al.Energy Storage for Long Endurance AUVs[C].The Institute of Marine Engineering,Science and Technology,2004.
[8] http://www.bluefinrobotics.com/products/bluefin-21/.
[9] 訚耀保.海洋波浪能综合利用——发电原理与装置[M].上海:上海科学技术出版社,2013:21-22.
[10] WHITTAKER T,COLLIER D,FOLLEY M,et al.The Development of Oyster-A Shallow Water Surging Wave Energy Converer[C]//Proceedings of the 7th European Wave and Tidal Energy Conference Porto,Portugal,2007:11-14.
[11] HENDERSON R.Design,Simulation,and Testing of a Novel Hydraulic Power Take-Off System for the Pelamis Wave Energy Converter[J].Renewable Energy,2006,31(2):271-283.
[12] Ocean Power Technologies. Ocean Wave Power is Abundant in the Vast Majority of the World.Its Harnessing Offers a Dependable,Clean Source of Renewable and Cost Effective Energy[EB/OL].(2016-01-12). http://www.oceanpowertechnologies.com/powerbuoy/.
[13] KOFOED J P,FRIGAARD P,FRIIS-MADSEN E,et al.Prototype Testing of the Wave Energy Converter Wave Dragon[J].Renewable Energy,2006,31(2):181-189.
[14] 盛松伟,游亚戈,张亚群,等.漂浮式波浪能装置能量转换系统研究[J].机械工程学报,2012,48(24) : 141-146.
[15] 毛昭勇,宋保维,郑珂.基于海洋能的无人水下航行器能源发电装置设计[J].测控技术,2012,31(6):127-129.
[16] 丁文俊,宋保维,毛昭勇,等.浅水域探测型无人水下航行器波浪能发电系统设计[J].机械工程学报,2015,51(2):141-147.
[17] 赵江滨,袁成清,严新平,等.一种振动能量收集装置:201410481711.5[P].2014-12-17.
[18] BRACCO G,GIORCELLI E,MATTIAZZO G,et al.Control Strategies for the ISWEC Wave Energy System[C]//9th European Wave and Tidal Energy Conference (EWTEC),2011.
[19] BRACCO G,GIORCELLI E,MATTIAZZO G.ISWEC:A Gyroscopic Mechanism for Wave Power Exploitation[J].Mechanism and Machine Theory,2011,46(10):1411-1424.
[20] SALCEDO F,RUIZ-MINGUELA P,RODRIGUEZ R,et al.Oceantec:Sea Trials of a Quarter Scale Prototype[C]//Proceedings of 8th European Wave Tidal Energy Conference,2009:460-464.
[21] KANKI H,ARII S,FURUSAWA T,et al.Development of Advanced Wave Power Generation System by Applying Gyroscopic Moment[C]//Proc.of the 8th European Wave and Tidal Energy Conference,2009.
[22] KANKI H,MORIMOTO T,KAWANISHI M,et al.Study on Dynamics of Floating Wave-Power Generating System Using Gyro Moment[J].The Japan Society of Mechanical Engineers,2005,80:57-58.
[23] TOWNSEND N,SHENOI A.Recharging Autonomous Underwater Vehicles from Ambient Wave Induced Motions[C]//Oceans-San Diego,IEEE,2013:1-10.
[24] TOWNSEND N C,SHENOI R A.Modelling and Analysis of a Single Gimbal Gyroscopic Energy Harvester[J].Nonlinear Dynamics,2013,72(1-2):285-300.
[25] PHILIPS A B,STEENSON L V,ROGERS E,et al.Delphin2:An Over Actuated Autonomous Underwater Vehicle for Manoeuvring Research[J].Transactions of the Royal Institution of Naval Architects,Part A-International Journal of Maritime Engineering,2013,155(A4):171-180.[26] SINGH H,BELLINGHAM J G,HOVER F,et al.Docking for an Autonomous Ocean Sampling Network[J].IEEE Journal of Oceanic Engineering,2001,26(4):498-514.
[27] STOKEY R,ALLEN B,AUSTIN T,et al.Enabling Technologies for REMUS Docking:An Integral Component of an Autonomous Ocean-Sampling Network[J].IEEE Journal of Oceanic Engineering,2001,26(4):487-497.
[28] KAWASAKI T,FUKASAWA T,NOGUCHI T,et al.Development of AUV "Marine Bird" with Underwater Docking and Recharging System[C]//Scientific Use of Submarine Cables and Related Technologies.The 3rd International Workshop on.IEEE,2003:166-170.
[29] HAGERMAN G.Wave Energy Systems for Recharging AUV Energy Supplies[C]//Autonomous Underwater Vehicles.Proceedings of the 2002 Workshop on.IEEE,2002:75-84.
[30] 海洋动力技术公司为美国海军研制的PowerBuoy系统下水[EB/OL].(2008-10-20)[2015-12-15].http://www.shipol.com.cn/xw/jckx/74507.htm.
[31] GAPETH EVANS. Bringing wave power to the offshore industry[EB/OL].(2013-11-06)[2015-12-15].http://www.offshore-technology.com/features/feature-bringing-Wave-Power-Offshore-industry/.
[32] MBARI. Harnessing the Awesome Power of the Ocean Waves[EB/OL].(2012-05-11)[2015-12-15].http://www.mbari.org/news/homepage/2012/powerbuoy/powerbuoy.html.
Review on Wave Power Generation Technologies for AUV
SUNTao1,2,3,ZHAOJiangbin1,2,3,YANXinping1,2,3,XUPengpeng1,2,3
(1. Reliability Engineering Institute, National Engineering Research Center for Water Transport Safety (WTS), Wuhan 430063, China; 2. School of Energy and Power Engineering, Wuhan University of Technology, Wuhan 430063, China; 3. Key Laboratory of Marine Power Engineering & Technology (Ministry of Transport), Wuhan 430063, China)
1000-4653(2016)04-0024-05
P743.2;TM612
A
2016-06-21
国家自然科学基金(51579197);中央高校基本科研业务费专项资金(2016-zy-020)
孙 涛(1990—),男,山东日照人,硕士生,从事波浪能发电技术、水下航行器总体设计研究。E-mail:ty-sun@foxmail.com 赵江滨(1976—),男,山东青岛人,副教授,主要研究方向为波浪能航行器、远程监测技术。E-mail:zhaojiangbin@whut.edu.cn
猜你喜欢
学苑创造·A版(2022年4期)2022-06-18
环球时报(2022-06-15)2022-06-15
疯狂英语·新读写(2021年6期)2021-08-05
科学大众(2021年9期)2021-07-16
科学家(2021年24期)2021-04-25
儿童故事画报(2020年7期)2020-08-03
小学科学(2020年6期)2020-06-22
阅读与作文(小学高年级版)(2020年3期)2020-03-02
当代陕西(2020年24期)2020-02-01
创新作文(1-2年级)(2017年7期)2017-12-26