基于SolidWorks回转支承自动加工机器人机械本体设计及关键技术研究
2016-09-22 01:13石宝玉安徽工业大学安徽马鞍山234001
铜陵学院学报 2016年2期
石宝玉(安徽工业大学,安徽 马鞍山 234001)
基于SolidWorks回转支承自动加工机器人机械本体设计及关键技术研究
石宝玉
(安徽工业大学,安徽 马鞍山234001)
针对目前回转支承加工劳动强度大、自动化程度低等问题,提出一种自动加工机器人设计方案。机器人的机械本体结构是整个系统的基础,也是目前主要的技术障碍之一。首先介绍了支承自动加工机器人机械本体的设计要求和关键技术,然后详细描述了基于SolidWorks软件平台设计的支承自动加工机器人机械本体并介绍与之相关的关键技术。最后,针对这款机器人给出具体设计参数结合企业实用来验证该设计方案的可行性。
回转支承;自动加工机器人;SolidWorks
1.引言

图1 某种型号回转支承三维图
回转支承在现实工业中应用非常广泛,被人们称为:“机器的关节”,其被广泛应用于汽车起重机、铁路起重机、集装箱起重机、挖掘机、以及高、精、尖端领域CT机驻波治疗仪、雷达天线座、导弹发射架、坦克、机器人以及旋转餐厅等等方面。某型号回转支承外观三维图如图1所示。回转支承作为重要的运动构件,处于机械结构承上启下的关键部位,其受力复杂,对产品的性能要求较高,但是目前国内回转支承制造技术和生产设备方面落后,有些产品比国外同类产品超重达50%之多,造成资源的大量浪费,而且产品的性能指标远低于国际水平。因此应开发高精度回转支承智能化操作机器人,建立智能化多功能自动操作系统。对实现高精度的产品的制造,拓宽企业产品的应用领域,增加企业经济效益及竞争力,实现企业的可持续发展,自动化操作降低能耗、提高生产能力和降低生产成本,同时对解决行业招工难、用人难等问题有重要意义。同时,采用智能化机器人取代传统的方式,可提高检测精度和检测效率,取代人直接工作在高危险的场合,同时大大减少人力资源,是一种安全,可靠,高效的加工方式。
2.回转支承自动加工机器人整体方案
回转支承自动加工机器人的机械本体机构是整个加工系统的基础,也是针对复杂的加工环境需解决的技术障碍之一。回转支承自动加工机器人的机械结构设计要求,主要有几点:(1)机器人机械臂能自动夹起支承毛坯;(2)自动将毛坯送至液压卡盘固定;(3)加工完成后自动校正支承精度;(4)加工好的支承工件及时运送到固定区域摆放;(5)提供足够的空间安装所携带的电源以及探测、记录和精度分析处理仪器。
目前,回转支承加工主要依靠人工完成,回转支承自动加工机器人在市场上还处于空白地带,由于支承加工的复杂性及精密性,机器人手臂代替人类手臂更准确、安全及时的完成工件装卸任务。支承加工车间数控机床的长度以及高度都具体一定规模,因此如何分配机械手的动作及机器人本体大小是回转支承自动加工机器人本体结构的关键技术之一,回转支承自动加工机器人设计时考虑多方面因素,作者在保证安全、效率及精度的情况下,提出的一种具有前景的设计方案,采用多只可移动2自由度伸缩移动手臂,伸缩手臂分别在水平和竖直方向运动,机械臂相互配合完成装卸工件的装载和拆卸,装载过程通过升级机床手动卡盘为液压自动卡盘,加装机械臂实现工件吊装、工件自动装夹、加工测量、工件自动拆卸码放,实验齿圈车加工自动化通过PLC控制机械臂的运动、工件吊装总成电磁铁的位置及吸合、液压卡盘的松开与夹紧、自动检测系统的检测车加工的路径等技术实现回转支承的自动加工。
本设计方案的自动加工机器人具有两只机械手臂加横梁,采用伺服电机加滚珠丝杠驱动方式带动装卸机械臂的移动,是一种回转支承自动加工领域的新型机器人。
3.回转支承自动加工机器人本体设计
回转支承自动加工机器人机械结构采用SolidWorks 2010软件进行设计。该设计平台功能强大、易学易用,同时能够提供不同的设计方案、减少设计过程中的错误以及提高产品质量。设计采用自下向上的方法设计,即先设计好各个零部件后,运用装配关系将各个零部件进行组合。采用SolidWorks 2010对回转支承自动加工机器人进行三维造型设计,总体机械结构如图2所示。

图2 回转支承自动加工机器人本体结构图
4.回转支承自动加工机器人结构及工作流程
回转支承自动加工机器人本体结构包括横梁、竖梁、第一吸附机械手和第二吸附机械手。横梁和竖梁垂直焊接固定,组成支承毛坯件的装卸框架,且为了尽量避免第一吸附机械手和第二吸附机械手在输送支承毛坯件的过程中,竖梁的机械晃动,导致支承毛坯件掉落,机构设计时沿竖梁的长度方向等间隔设置4个横梁,以增强装卸框架的稳定性。竖梁设置于液压卡盘的上方,液压卡盘的一侧设置切削加工支承毛坯件的机床。竖梁的侧面开设有导向槽,第一吸附机械手的上部设置有滑块,滑块与导向槽相卡合,液压驱动机构驱动第一吸附机械手沿导向槽滑动。第一吸附机械手的下部通过伸缩轴连接吸附卡盘,伸缩轴控制吸附卡盘在竖直方向移动。所述的吸附卡盘的下部活动连接有磁铁,图中所示的磁铁与液压缸的活塞相连,液压缸通过活塞控制磁铁沿吸附卡盘的径向移动。第一吸附机械手、第二吸附机械手分别设置于液压卡盘的两侧。第一吸附机械手用于将支承毛坯件输送到液压卡盘上,供机床加工,第二吸附机械手用于将经机床加工完成的支承毛坯件取下堆放至一旁。第一吸附机械手和第二吸附机械手协同配合,保证本实施例切削加工用机械手具有最佳的加工效率。支承自动加工技术路线如图3所示。
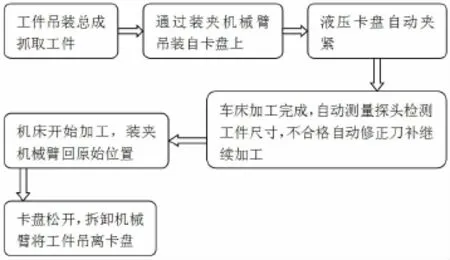
图3 支承自动加工技术路线图
5.回转支承自动加工机器人关键技术
回转支承自动加工机器人是一个典型机电一体化系统,机械和电气控制相结合才能保证机器人准确高效的完成支承加工任务,因此,机械本体之外尚有一些需要同步解决的关键问题:
(1)应用伺服电机位置控制与减速机的无间隙配合使用伺服电机的位置控制,通过外部输入的脉冲的频率来确定转动速度的大小,通过脉冲数来确定转动的角度,以确保移动的距离,加以减速机的配合确保在带动负载运行下有足够的扭矩!保证机械移动的精度和实现各个电机之间的协作。
(2)校圆精度检测
使用德国进口的非接触式传感器测量拾取圆表面的三个等分点确定圆的大小通过PLC的函数运算与实际所需圆的大小比较,进行控制伺服运动使各个电机按校圆程序进行。

图4 运动控制器
(3)基于MODBUS的分布式控制器研究
以校圆机器为控制对象,构建结构简单,扩展能力强的以PLC控制器为核心(见图4),配有实时操作系统和以人机界面为通讯载体的伺服驱动器(见图5)的新型机器人控制器。开展基于以PLC的 I/O接口技术及伺服驱动技术研究;研究机床运动控制技术,提高机器人运行速度和实时性,提高机器人动态性能。
(4)人机交互程序和系统编程技术

图5 伺服驱动和电机
人机交互界面和可靠的下位机程序是保证整个系统稳定有效运行的关键。所以本技术主要研究了下位机软件技术、伺服控制原理;人机界面技术。
下位管理软件主要包括:1.显示屏通信模块;2.PLC通信模块;3.运动控制模块;4.日志管理模块;5.辅助功能模块;6.IO测试模块;7.报警记录模块;8.主程序调度界面模块。
(5)通过升级机床手动卡盘为液压自动卡盘,加装机械臂实现工件吊装、工件自动装夹、加工测量、工件自动拆卸码放,实验齿圈车加工自动化通过PLC控制机械臂的运动、工件吊装总成电磁铁的位置及吸合、液压卡盘的松开与夹紧、自动检测系统的检测、车加工的路径。
(6)自动检测系统
自动检测系统的在整个自动化车加工中至关重要,通过自动化检测,在加工过程中不再需要人员的参与,在车加工完后通德国进口非接触式测头,检测工件,数据通过PLC链接,在公差范围内则执行工件拆卸等后续动作,超出公差范围,PLC将修正误差,重新进行二次车加工,直至测量符合公差。
6.回转支承自动加工机器人关键技术参数
高精度回转支承自动加工机器人的开发,新设备的装夹机械臂最大负载:2100Kg,最大加工直径:4.5m,校圆精度:±0.15mm,完成校圆直径为200 mm-4.5 m的校圆机器人系统样机及周边设备的开发。
在满足机械本体刚度、强度及一些其它技术参数的基础上选择结构简单、机身紧凑的机身设计,以满足轻量化、低成本及可维护性要求。成品具体参数范围如表1:

表1 回转支自动加工机器人设计参数
7.结束语
本文介绍的这款具有自动加工回转支承功能的机器人,可高效准确的完成支承加工任务,基于solidworks2010设计的机械本体完全符合支承自动加工的机械设计要求,同时基于三维软件的机械设计大幅度地降低物理样机的制造成本并缩短开发时间,确保了设计的可行性。目前,本产品已在支承生产企业投入使用,给企业提高了劳动效率和经济效益。
[1]SoildWorks公司.零件与装配体教程[M].北京:机械工业出版社,2009.
[2]张小萍,王君泽.虚拟现实技术在三维编织物设计及仿真中的应用[J].宇航材料工艺,2005(5):37-40.
[3]孟祥德,李立顺,王斌,等.CAD/CAE协同仿真技术应用研究[J].机械设计与制造,2007(9):213-215.
[4]SolidWorks公司.SolidWorks API二次开发[M].生信实维公司,译.北京:机械工业出版社,2005.
[5]江洪,魏峥,王涛威.SolidWorks二次开发实例解析[M].北京:机械工业出版社,2004.
Research on Mechanical Structure and Key Technology on Automatic Processing Robot of Slewing Ring Based on SolidWorks
Shi Bao-yu
(Anhui University of Technology,Ma’anshan Anhui 234001,China)
According to the problems of high strength and low degree of automation,the design scheme of automatic machining robot is presented.Mechanical structure is the important basis of the whole system and primary technology obstacle at present.Firstly,the requirement and key technologies for the design of the supporting automatic processing of mobile robot is introduced,and then a detailed description based on SolidWorks software platform design of supporting automatic processing robot mechanical body and the related key technologies are done. Finally,the specific design parameters for this robot are given to verify the feasibility of the design scheme.
slewing ring;automatic processing robot;SolidWorks
TP24
A
1672-0547(2016)02-0108-03
2016-03-01
安徽工业大学青年基金项目“行回转支承自动加工机器人”(QZ201408)
石宝玉(1982-),男,安徽宿松人,安徽工业大学机械工程学院讲师,硕士,研究方向:机械自动化、机器人控制。
猜你喜欢
内燃机与配件(2022年2期)2022-01-17
装备制造技术(2020年4期)2020-12-25
制造技术与机床(2019年10期)2019-10-26
制造技术与机床(2019年9期)2019-09-10
制造技术与机床(2018年12期)2018-12-23
制造技术与机床(2018年12期)2018-12-23
制造技术与机床(2018年11期)2018-11-23
制造技术与机床(2017年7期)2018-01-19
制造技术与机床(2017年4期)2017-06-22
制造技术与机床(2017年2期)2017-05-04