
基于单通道单脉冲跟踪接收机的快速校相技术
2016-09-21 06:21乔建江金立斌
河北省科学院学报 2016年2期
张 冰,乔建江,金立斌
(中国电子科技集团公司第五十四研究所,河北 石家庄 050081)
基于单通道单脉冲跟踪接收机的快速校相技术
张冰,乔建江,金立斌
(中国电子科技集团公司第五十四研究所,河北 石家庄050081)
航天测控系统中目前普遍采用双通道跟踪体制的多功能跟踪基带进行快速校相,但在遥感卫星接收系统中单通道跟踪接收机应用普遍,动态快速校相技术应用尚未得到广泛应用,本文根据单通道单脉冲跟踪接收机的校相基本原理,提出了单通道单脉冲跟踪接收机快速校相方法,并对传统的快速校相方法进行了改进,有效提高了快速校相精度和遥感接收设备自动化标校水平。
单通道单脉冲跟踪接收机;快速校相;自动标校;遥感
引言
在遥感卫星跟踪接收领域普遍采用单通道单脉冲自跟踪接收机,单通道跟踪接收机的动态快速校相技术应用尚未得到广泛应用。而传统的校相方法存在流程复杂、校相时间长、操作不方便等缺点,并且不能任务进站初期进行校相,有时甚至会导致卫星跟踪任务的失败。为了寻求一种使用便利、简单、快速的校相技术,笔者在分析设备工作原理的基础上,提出一种高效率、高精度可满足实时校相的单通道单脉冲自跟踪接收机快速校相算法模型,实现了遥感跟踪接收领域的无塔一键校相技术。
1 技术原理
1.1单通道单脉冲跟踪接收机校相基本原理
单通道单脉冲跟踪体制在遥感卫星接收系统中得到了广泛应用。单通道单脉冲技术也就是单通道的变换技术,它是将天线及馈源系统产生的方位误差信号、俯仰误差信号,分别经过相互正交的两个低频信号调制后再与和信号合并形成一个单通道信号。这个和信号可以是调频或调相信号。单通道射频载波信号的角度或相位变化用于传输数据信息,而射频载波信号的幅度变化用于传输角误差信息,通过一个共同的下行通道,传输到接收机再分别解调出数据信息和角误差信息,如图1所示。
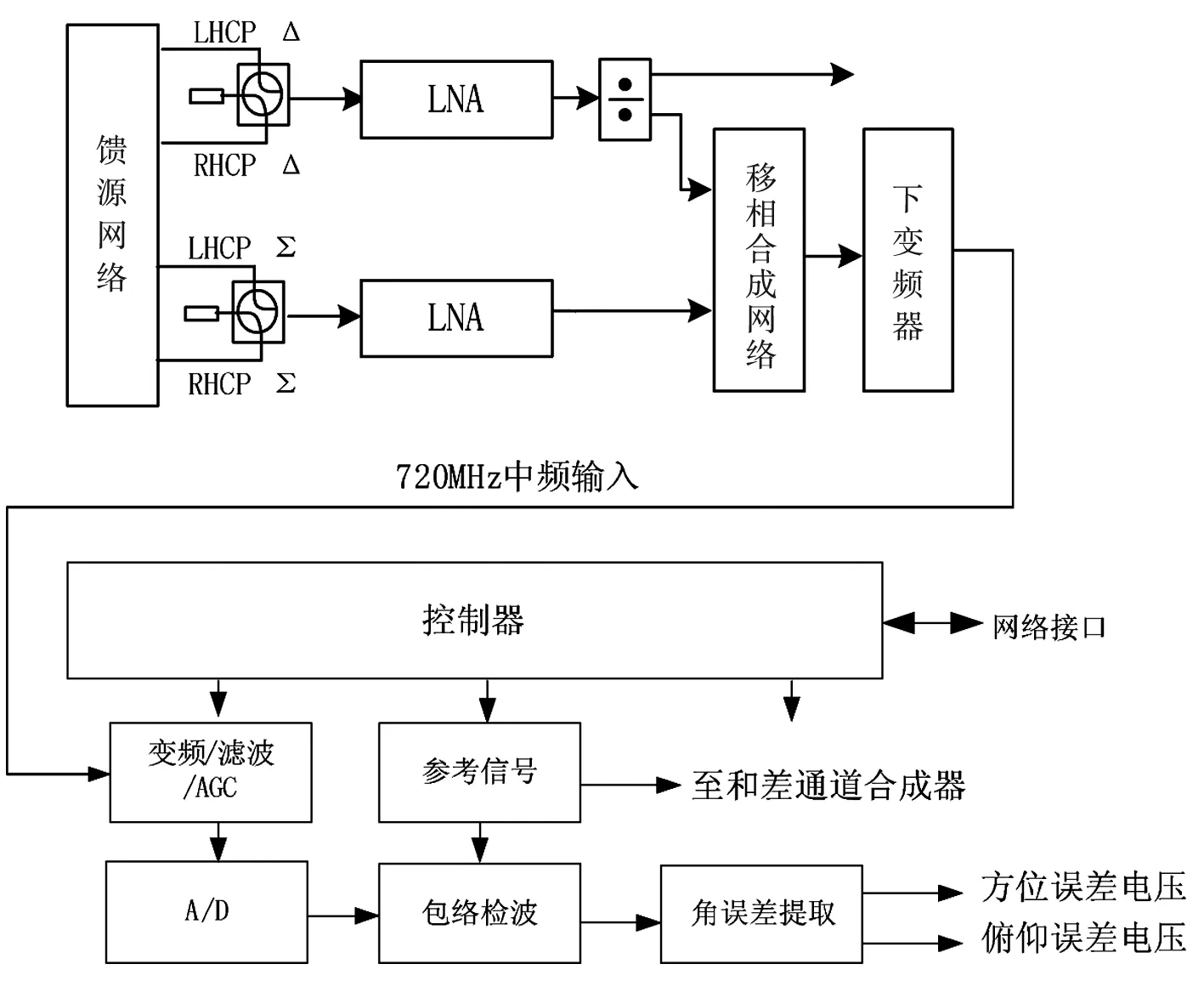
图1 单通道单脉冲跟踪原理示意图
则根据上述分析解调可得:
UAZ(t)=k′θcos(Φ+ΔΦ)
UEL(t)=k′θsin(Φ+ΔΦ)
展开可以得到:
UAZ(t)=k′θcosΦcos(ΔΦ)-k′θsinΦsin(ΔΦ)
UEL(t)=k′θsinΦcos(ΔΦ)+k′θcosΦsin(ΔΦ)
所以,引入的交叉耦合为:
单通道合成器中采用6bit数字移相器,数字移相器产生的最大相位偏差为2.8°,温度变化20℃产生的相移变化为2°,所以ΔΦ≤5°,引入的交叉耦合:
文本是语文课堂教学的重要凭据,涵养语文的“根”需要语文教师立足文本,依托文本,树立文本意识,最终实现语文教学的高效。
0≥-tan(ΔΦ)≥-0.087
0≤tan(ΔΦ)≤0.087
和差通道相移的不一致会导致交叉耦合产生。工程实践表明,交叉耦合小于1∶8时,单脉冲跟踪性能处于比较理想的状态;交叉耦合大于1∶3时,单脉冲跟踪系统将无法实现对目标的收敛跟踪。
1.2单通道单脉冲跟踪快速校相算法建模
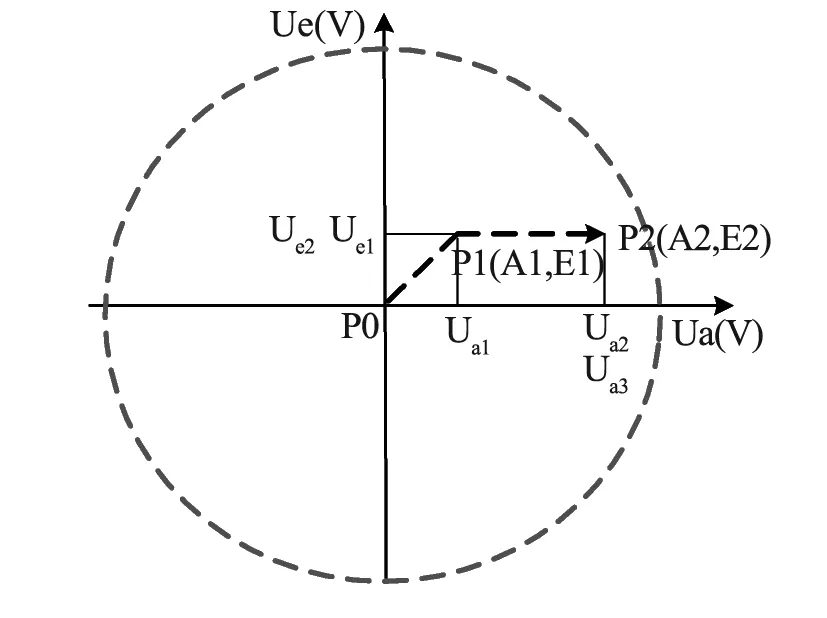
图2 拉偏误差电压分布图
在进行遥感卫星任务跟踪时,为了实现方便,一般在卫星进站初期,可借助ACU的程序引导或数字引导功能,当目标进入天线主波束的3dB波瓣范围后,但不一定是天线电轴对准目标,跟踪接收机锁定信号,AGC满足跟踪门限,并且输出方位和俯仰跟踪角误差电压,对跟踪接收机参数进行初始化设置(对于左旋接收信号,将接收机方位移相值、俯仰移相值、前相移相值分别初始化为0°、0°、0°;对于右旋接收信号,将接收机方位移相值、俯仰移相值、前相移相值分别初始化为0°、180°、0°)。这时ACU读取一组初始方位、俯仰误差电压UA1、UE1,然后方位拉偏(正偏或者负偏)一个固定位置偏置量ΔA,天线从P1拉偏至位置P2,再读取一组方位、俯仰误差电压UA2、UE2,这样可以通过公式计算出方位相位值。拉偏误差电压分布图见图2所示,图中外围虚线是最大波束边缘,跟踪误差电压最大处。
天线由P1转动到P2点位置时,单通道跟踪接收机的前相移相值计算如下[1]:



分别按下式计算跟踪接收机方位增益系数为:

图3 拉偏误差电压分布图
以上快速校相算法是基于方位、俯仰差信号相位理想正交,方向图差斜率完全一致的条件下进行算法设计和流程控制的,具有一定的局限性。在单通道跟踪体制中,方位和俯仰和差合成一路信号,实际工作时,跟踪接收机接收解调出的方位差信号与俯仰差信号往往没有这样理想。在进行了快速校相后,在进行天线自跟踪条件检查时,会发现当天线相对目标零点在俯仰方向拉偏时,将带来交叉耦合的恶化,恶化程度与方位、俯仰差信号的相位差值有关,因此这仅仅是实现了“能跟踪”,但是距离“跟踪好”还是有需要进一步校正。由此可见现有算法的局限,对天线自跟踪性能存在潜在的影响。鉴于目前算法的局限性,对现有的快速校相算法及流程进行优化改进,在现有天线拉偏至位置P2的基础上,在俯仰方向上再拉偏一个固定位置偏置量ΔE角度(如果方位顺偏,则俯仰上偏;如果方位逆偏,则俯仰下偏)到P3 点,再读取一组方位、俯仰误差电压UA3、UE3,同样使用上述公式计算出相位值及增益系数,将此相位值与第一次拉偏相位值进行比较,将误差修改至方位移相值,即可完成快速校相。拉偏误差电压分布图见图3所示,图中外围虚线是最大波束边缘,跟踪误差电压最大处。
2 测试结果
在某遥感接收天线上采用了该动态目标快速校相技术,经过系统联试和用户使用验证,和常规校相比较,跟踪校相时间大幅度地缩短,校相精度高,交叉耦合优于1/7,满足遥感卫星高仰角跟踪需要,并且实现了在跟踪低轨卫星初期的一键快速校相,校相及跟踪结果满足指标要求。具体校相测试结果见表1所示。

表1 单通道单脉冲接收机快速校相测试结果
3 结束语
针对遥感卫星运动特性以及遥感卫星接收领域广泛使用的单通道跟踪接收机校相时间长、校相困难的难题,提出了基于单通道跟踪接收机的卫星动态目标快速校相技术,实现了速度快、流程简单的遥感卫星接收领域无塔跟踪一键快速校相,解决了对于遥感卫星跟踪接收领域中采用单通道单脉冲跟踪体制快速校相的难题,也解决了传统的校相方法时间长、过程复杂的缺点,从而减小了硬件研发的成本,提高了经济效益,方便了用户使用。该快速校相技术已在多个项目中得到了应用,校相成功率100%,校相结果完全满足跟踪精度要求。
[1]成亚勇,李玉瑄.双通道角跟踪体制实时校相算法研究[J].无线电工程,2009,39(05):32-33.
[2]瞿元新,毛南平. 船载X频段微波统一测控系统快速校相方法[J].遥控遥测,2014,(02):69-72.
Fastphasecalibrationmethodforsingle-channelmonopulsetrackingreceiver
ZHANGBing,QIAOJian-jiang,JINLi-bin
(The 54th Research Institute of CETC,Shijiazhuang Hebei 050081,China)
Thefastphasecalibrationmethodhasnotbeenapplicableforsingle-channelmonopulsetrackingreceiver.Thispaperpresentsafastphasecalibrationmethodforsingle-channelmonopulsetrackingreceiverandimprovethetraditionalmethodbasedonthetheoryofmonopulsetracking.Itpavesthewayoftheaccuratetrackingandtheautomaticcalibrationforremotesensingsatellitetracking.
Single-channelmonopulsetrackingreceiver;Fastphasecalibration;Automaticcalibration;Remotesensing
2016-03-21
张冰(1981-),男,工程师,主要从事天线伺服控制系统的设计和研制.
1001-9383(2016)02-0063-05
TN850
A
猜你喜欢
成都信息工程大学学报(2021年4期)2021-11-22
幼儿园(2021年12期)2021-11-06
北京航空航天大学学报(2020年3期)2021-01-14
中国生物医学工程学报(2019年6期)2019-07-16
自动化学报(2017年2期)2017-04-04
系统工程与电子技术(2016年2期)2016-04-16
制导与引信(2016年3期)2016-03-20
中国修辞(2016年0期)2016-03-20
电气电子教学学报(2016年6期)2016-03-02
火控雷达技术(2016年2期)2016-02-06
