二维有源相控阵天线跟踪技术研究
2016-09-21 06:21:49李涛
河北省科学院学报 2016年2期
李 涛
(中国电子科技集团公司第五十四研究所,河北 石家庄 050081)
二维有源相控阵天线跟踪技术研究
李涛
(中国电子科技集团公司第五十四研究所,河北 石家庄050081)
当载体姿态变化时,利用惯导信息引导安装在移动载体上的二维有源相控阵天线波束指向卫星。首先对卫星在地理坐标系、载体坐标系和天线坐标系中的位置进行简要介绍,然后对跟踪目标角进行解算,最后通过跑车测试,验证了该跟踪技术的可实施性。
有源;相控阵天线;跟踪
随着人类对信息化和数字化需求的增加,卫星通信技术的需求量也日益增加,尤其是对移动载体卫星通信系统的需求更是逐年增加[1]。目前市场上,动中通天线大多采用二维机械座架形式。随着用户对装车外观要求的提高,在一定条件下采用二维有源相控阵天线跟踪技术是最佳的选择。
本文约定载体姿态信息的定义如下:
航向角H:载体行进方向与正北的夹角,以正北为基准,顺时针为正;
横摇角R:以水平为基准,行进方向作参照,载体右倾为正;
纵摇角P:以水平为基准,载体正前方向上为正;
地理方位角A:在地理坐标系中,天线指向卫星时的方位角度;
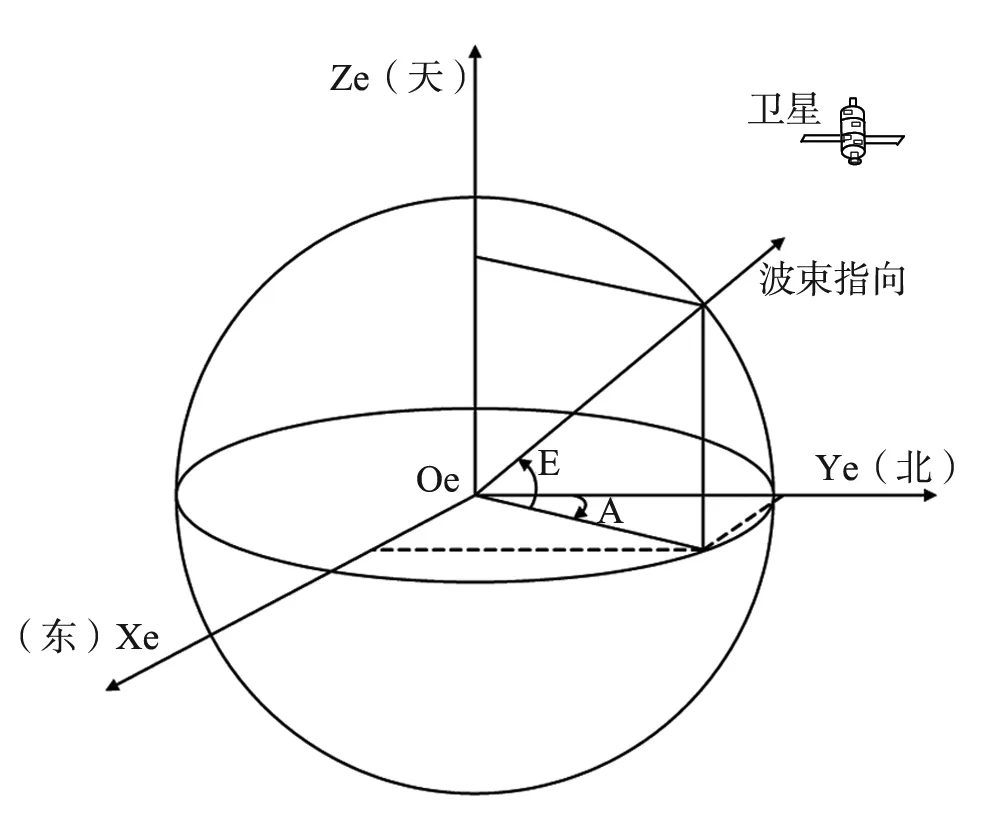
图1 卫星在地理坐标系中的位置
地理俯仰角E:在地理坐标系中,天线指向卫星时的俯仰角度。
1 卫星在地理坐标系中的位置
卫星在地理坐标系中的极坐标矢量[De]如图1所示,可以表示为(因为只考虑指向,所以矢量长度不予考虑):
2 卫星在载体坐标系中的位置
[Dj]=MR*MP*MH*[De]
式中

可以得出载体坐标系中的指向角[2]Aj和Ej:
Ej=arcsin[sinR*cosE*sin(A-H)-cosR*sinP*cosE*cos(A-E)+cosR*cosP*sinE]
3 卫星在天线坐标系内的位置
二维有源相控阵天线,其扫描角度为ψ和θ,卫星在天线坐标系中的位置如图2所示。根据实际设计要求,ψ的变化范围为[0°,360°],θ的变化范围为[0°,70°]。
4 ψ和θ的解算
天线在安装时,假定载体坐标系与天线坐标系的位置关系如图3所示,有固定偏差a,则卫星在天线坐标系中的极坐标矢量为[Da]:
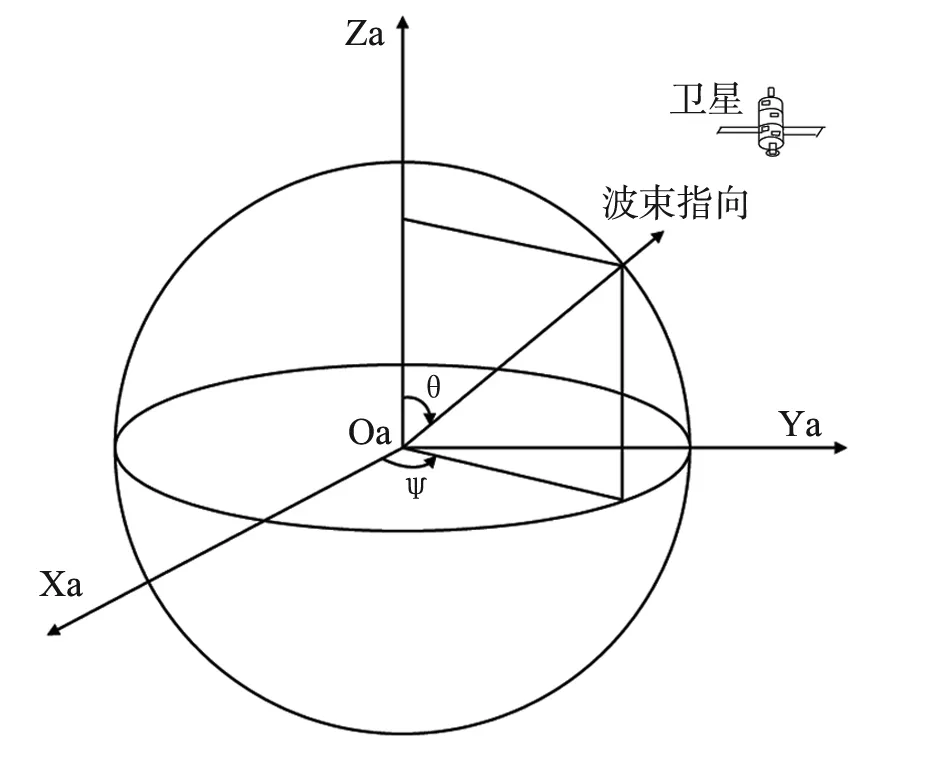
图2 卫星在天线坐标系中的位置
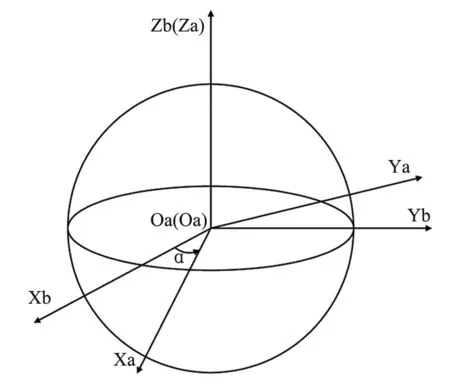
图3 载体坐标系与天线坐标系的关系
通过解算可以得出:Aa=Aj+a,Ea=Ej。
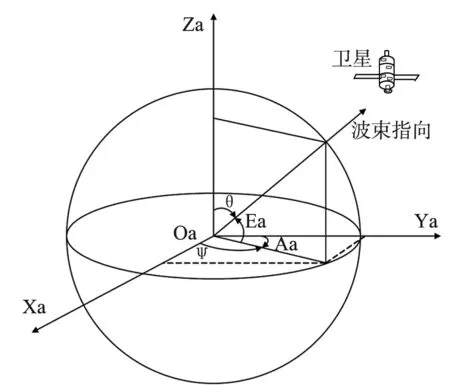
图4 天线坐标系中Aa、Ea和ψ、θ的关系
在天线坐标系中,Aa、Ea和ψ、θ的关系如图4所示。
通过图4分析,计算得出
θ=90°-Ea
5 结束语
随着科技进步,用户要求的提高,有源相控阵天线在动中通领域具有很大的市场潜力。在某频段二维有源相控阵天线跑车测试中验证了该跟踪技术的可实施性。
[1]魏英杰. 动中通地面站卫星天线伺服控制系统[J].无线电通信技术,2007,33(3):30-32.
[2]温桂森. 动载体卫星通信天线控制数学模型[J].无线电通信技术,1997,23(4):36-40.
Researchontrackingtechnologyoftwodimensionalactivephasedarraysantenna
LITao
(The 54th Research Institute of CETC,Shijiazhuang Hebei 050081,China)
Thetwodimensionalactivephasedarraysantennaisinstalledinavehicle.ItisledtothesatellitebytheinformationofINS,whentheattitudeofvehicleischanging.Inthispaper,itintroducedthepositionofsatelliteinthelocal-levelframe,inthebodyframeandintheantennaframefirstly,thencalculatedthetargetvalueontrackingsatellite,lastlyvalidatedtherealizationofthetrackingtechnologybytesting.
Active;Phasedarraysantenna;Tracking
2016-04-12
李涛(1982-),男,河北石家庄人,硕士,工程师,主要研究方向:信号与信息处理、惯性导航.
1001-9383(2016)02-0054-03
TN965
A
猜你喜欢
卫星应用(2023年1期)2023-02-21 06:52:02
煤气与热力(2021年3期)2021-06-09 06:16:16
化工管理(2021年7期)2021-05-13 00:45:20
电子制作(2019年24期)2019-02-23 13:22:16
电子测试(2018年15期)2018-09-26 06:01:46
通信电源技术(2018年3期)2018-06-26 08:05:48
数字通信世界(2017年3期)2017-03-29 02:24:29
太空探索(2016年3期)2016-07-12 09:58:45
火控雷达技术(2016年3期)2016-02-06 02:30:40
广西文学(2015年9期)2015-10-24 03:53:14