基于准零刚度隔振器的车-座椅-人耦合模型动态特性研究
2016-09-13 06:05李舜酩
振动与冲击 2016年15期
王 勇, 李舜酩, 程 春
(南京航空航天大学 能源与动力学院,南京 210016)
基于准零刚度隔振器的车-座椅-人耦合模型动态特性研究
王勇, 李舜酩, 程春
(南京航空航天大学 能源与动力学院,南京210016)
准零刚度隔振器能克服线性被动隔振器中存在的降低固有频率与提高承载力之间的矛盾,将准零刚度隔振器运用到汽车座椅的隔振中,建立了考虑准零刚度隔振器的8自由度车-座椅-人耦合动力学模型,采用数值法分析了此耦合动力学模型在受到路面冲击激励及随机激励下的动态特性。结果表明,当采用准零刚度隔振器作为汽车座椅悬架时,整车乘坐舒适性得到有效改善,汽车悬架行程及座椅行程在允许的行程取值范围内。研究内容对将准零刚度隔振器设计成汽车座椅悬架具有理论指导意义。
准零刚度;非线性隔振器;车-座椅-人耦合模型;动态特性
汽车座椅悬架系统用于支撑驾乘人员,减缓路面不平给人体带来的冲击并缓和车身传递的振动,为驾乘人员提供良好的乘坐环境,对提高整车乘坐舒适性具有重要的意义。汽车座椅悬架可分为被动座椅悬架,半主动座椅悬架及主动座椅悬架。半主动座椅悬架及主动座椅悬架具有良好的隔振性能,但存在成本高,耗能大等缺点;被动座椅悬架结构较简单,易于实现,可靠性与经济性较好。众所周知,当线性被动座椅悬架的刚度比较小时,系统固有频率较低,隔振频带较宽,整车乘坐舒适性较好,但会导致座椅悬架系统的静态位移增大,承载能力降低,线性被动座椅悬架难以解决这对矛盾。近年来,国内外学者提出一类具有准零刚度(Quasi-Zero-Stiffness, QZS)的非线性隔振器[1-2],将准零刚度隔振器运用到汽车座椅的隔振中,能够克服传统线性被动座椅悬架中存在的矛盾。
准零刚度隔振器由正刚度弹性元件和负刚度调节机构并联组成,其中正刚度弹性元件用于承受主要载荷,负刚度调节机构用于抵消正刚度弹性元件的刚度,使系统在静态平衡位置处的刚度趋于零。正刚度弹性元件一般为垂直弹簧,而负刚度调节机构有多种形式。彭献等[3]使用连杆机构作为负刚度调节机构,研究了准零刚度隔振器的设计方法。张建卓等[4]将欧拉压杆作为负刚度调节机构,设计了正负刚度并联的隔振系统,通过试验研究验证了该非线性隔振系统能实现超低频宽频带隔振。Carrela等[5]、徐道临等[6]将斜置弹簧作为负刚度调节机构与垂直弹簧并联组成准零刚度隔振器,并详细研究其幅相频特性及传递特性。Zhou等[7]使用电磁弹簧作为负刚度调节机构,设计了准零刚度隔振器,并进行了理论与试验分析。路纯红等[8]将连杆机构运用到负刚度调节机构中,设计了一个新型的低频非线性被动隔振系统,实现了低频隔振目的。刘兴天等[9]使用欧拉屈曲梁作为负刚度调节机构,分析了该准零刚度隔振器的静力与动力学特性,验证了准零刚度隔振器比线性隔振器具有更低的隔振频率与更宽的隔振频带。王毅等[10]设计了一种带滚球装置的准零刚度隔振器,详细分析了其幅相频特性及传递特性。准零刚度隔振器具有高的静刚度和低的动刚度,高的静刚度使隔振器的承载能力提高,静态位移减小;低的动刚度使系统的固有频率降低,获得比线性隔振器更宽的隔振频带。
本文将准零刚度隔振器运用到汽车座椅的隔振中,并为了更好的研究车-座椅-人的振动问题,对实际物理模型进行简化处理,建立考虑准零刚度隔振器的8自由度车-座椅-人耦合动力学模型。分析此耦合动力学模型在受到路面冲击激励及随机激励下的动态响应,研究准零刚度隔振器系统参数对此耦合模型动态特性的影响,并与等效的线性被动座椅悬架进行对比分析。
1 准零刚度隔振器模型建立
准零刚度隔振器结构示意图如图1所示。准零刚度隔振器由垂直弹簧与两个对称的负刚度调节机构并联组成。该准零刚度隔振器已经在文献[11]中详细讨论,本文只作简单的论述。
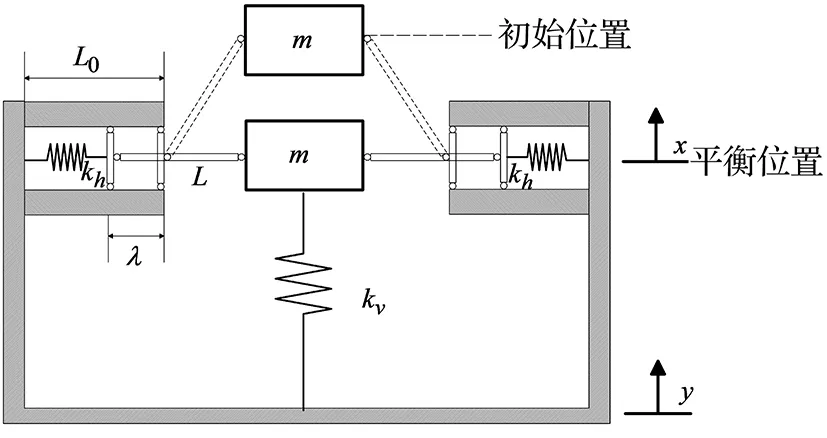
图1 准零刚度隔振器结构示意图Fig.1 Schematic of a QZS isolator
图示位置为系统受载后,连接杆处于水平位置且系统达到静平衡状态。系统中垂直弹簧与水平弹簧刚度分别为kv,kh;水平弹簧初始长度为L0;当系统处于静态平衡位置时水平弹簧的压缩量为λ;连接杆长度为L;x为承载质量m从静态平衡位置开始时的位移;y为基础激励位移。
准零刚度隔振器的力-位移与刚度-位移特性可表示为
(1)
式中:u=x-y,将式(1)无量纲化,可得
(2)

(3)


图2 准零刚度隔振器无量纲力-位移及刚度-位移曲线Fig.2 Non-dimensional force-displacement and stiffness-displacement curves of the QZS isolator


图3 不同k值下,准零刚度隔振器无量纲刚度-位移曲线Fig.3 Non-dimensional stiffness-displacement curves of the QZS isolator with different k
(4)
准零刚度隔振器无量纲力及刚度精确表达式与近似表达式对比曲线如图4所示。无量纲力及刚度近似表达式与精确表达式的误差随着系统位移量的增大而增大。但当系统位移量较小,在静态平衡位置附近处时,近似表达式与精确表达式的误差较小,且五阶泰勒级数展开式比三阶泰勒级数展开式能更好的模拟精确表达式。
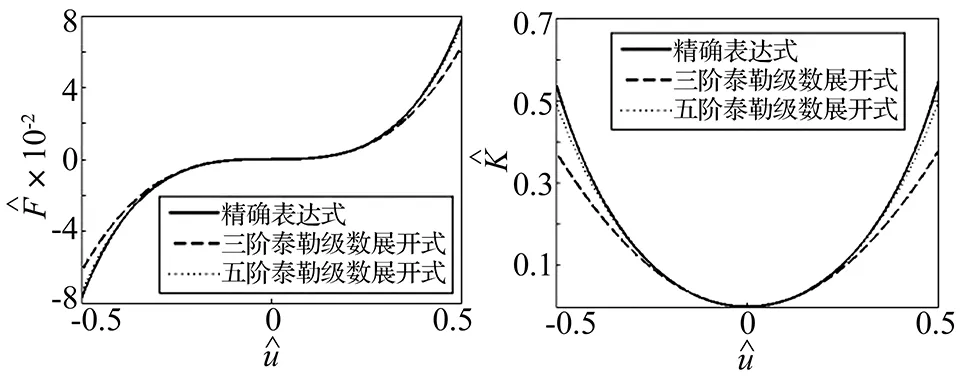
图4 无量纲力及刚度精确表达式与近似表达式对比曲线Fig.4 Comparison between exact and approximate expressions of non-dimensional force and stiffness
2 车-座椅-人耦合模型建立
国内外学者已经提出了多种车-座椅-人耦合模型[12-14],本文将车-座椅-人耦合模型简化为8自由度模型,如图5所示。此耦合模型包含一个2自由度的1/4车悬架模型[12],一个2自由度的座椅模型[13-14]和一个4自由度的人体模型[13-14]。1/4车悬架模型简易且能够为此耦合模型低频范围的研究提供准确信息[12],2自由度的座椅模型包含两个部分:座椅框架和座椅座垫,4自由度的人体模型包含了人体中最重要的部位:大腿、下肢、上肢及头部,此耦合模型考虑了准零刚度隔振器的非线性因素。图中各参数的定义如表1所示。

图5 车-座椅-人耦合模型Fig.5 Vehicle-seat-human coupled model
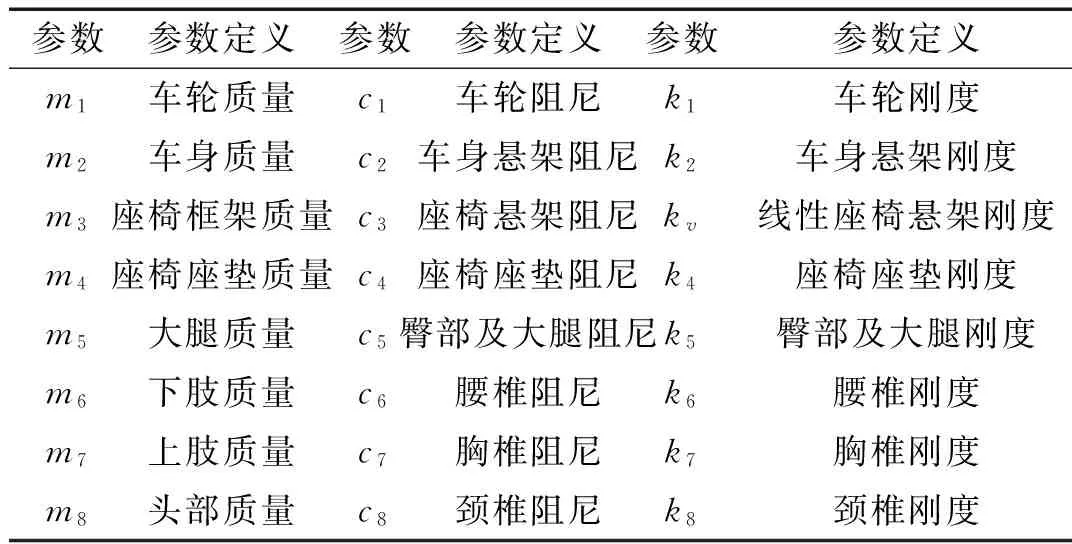
参数参数定义参数参数定义参数参数定义m1车轮质量c1车轮阻尼k1车轮刚度m2车身质量c2车身悬架阻尼k2车身悬架刚度m3座椅框架质量c3座椅悬架阻尼kv线性座椅悬架刚度m4座椅座垫质量c4座椅座垫阻尼k4座椅座垫刚度m5大腿质量c5臀部及大腿阻尼k5臀部及大腿刚度m6下肢质量c6腰椎阻尼k6腰椎刚度m7上肢质量c7胸椎阻尼k7胸椎刚度m8头部质量c8颈椎阻尼k8颈椎刚度
z1~8为各部分质量的垂直位移,zr为路面垂直激励位移。建立在各部分质量平衡位置处,考虑准零刚度隔振器的8自由度车-座椅-人耦合模型动力学方程,可得
(5)
式中F3为座椅悬架的弹性恢复力,当座椅悬架分别采用线性隔振器和准零刚度隔振器时,F3可分别表示为
F3=kv(z3-z2),
(6)
3 仿真分析
本文仿真的车-座椅-人耦合模型参数值来自于文献[12-13],如表2所示。
表2 车-座椅-人耦合模型参数值
3.1冲击激励
假设路面激励为某种冲击激励,路面激励位移zr如下式所示
(7)
式中:A为路面质量块高度,l为路面质量块长度,V为汽车行驶速度。

图6 冲击激励下人体各部分加速度响应Fig.6 Acceleration response of different human body parts under shock excitation


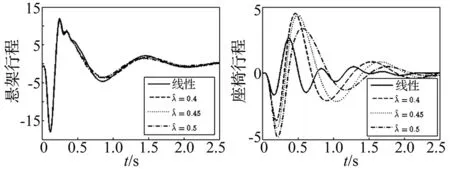
图7 冲击激励下汽车悬架行程及座椅行程Fig.7 Vehicle suspension stroke and seat stroke under shock excitation
当汽车受到路面冲击激励时,定义人体各部分所受峰值载荷来评价座椅悬架的抗冲击性能,峰值载荷定义如下
(8)

图8 冲击激励下人体各部分所受峰值载荷随阻尼c3变化曲线Fig.8 Peak load of different human body parts under shock excitation with different c3
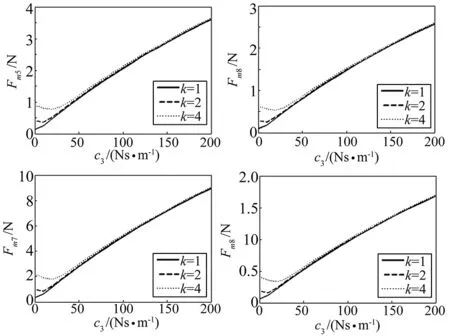
图9 冲击激励下,刚度比k取不同值时,人体各部分所受峰值载荷随阻尼c3变化曲线Fig.9 Peak load of different human body parts under shock excitation with different c3 for different k
当汽车行驶车速增加时,路面冲击激励持续时间变短。冲击激励下人体各部分所受峰值载荷随车速V的变化曲线如图10所示。当座椅悬架采用两种不同的悬架时,人体各部分所受峰值载荷随车速V的增加整体有减小的趋势。

图10 冲击激励下人体各部分所受峰值载荷随车速V变化曲线Fig.10 Peak load of different human body parts under shock excitation with different V
3.2随机激励
假设路面激励为随机激励,路面功率谱密度可表示为
(9)
式中:Ω为空间频率,Ω0=1/2π为参考空间频率,n1与n2为路面不平度常数,Sg(Ω0)为表征路面不平度的系数。假设汽车以一恒定的车速V在水平路面上行驶,路面随机激励可用谐波合成法[12]模拟,表示如下
当路面为C级路面时,Sg(Ω0)=256×10-6m3。选取参数n1=2,n2=1.5,路段长度l=200 m,Nf=200,汽车行驶速度V=60 km/h。准零刚度隔振器的系统参数与冲击激励所选参数一致。随机激励下人体各部分动态响应通过四阶定步长的龙格库塔法结合式(6),式(9)和式(10)对式(5)进行数值积分得到。由于随机激励具有随机性的特点,数值模拟随机模拟100次,取100次模拟的均值作为统计结果。


图11 随机激励下人体头部加速度功率谱密度Fig.11 PSD of acceleration of human head under random excitation

图12 随机激励下人体各部分加速度均方根值随车速V变化曲线Fig.12 RMS of acceleration of different human body parts under random excitation with different V

图13 随机激励下汽车悬架行程及座椅行程加速度均方根值随车速V变化曲线Fig.13 RMS of vehicle suspension stroke and seat strokeunder random excitation with different V

图14 随机激励下人体头部加速度,汽车悬架行程及座椅行程均方根值随阻尼c3变化曲线Fig.14 RMS of acceleration of human head, vehicle suspension stroke and seat stroke under random excitation with different c3

图15 随机激励下,刚度比k取不同值时,人体头部加速度,汽车悬架行程及座椅行程均方根值随阻尼c3变化曲线Fig.15 RMS of acceleration of human head, vehicle suspension stroke and seat stroke under random excitationwith different c3 for different k
4 结 论
本文将准零刚度隔振器运用到汽车座椅的隔振中,建立了考虑准零刚度隔振器的8自由度车-座椅-人耦合动力学模型。研究了此耦合动力学模型在受到路面冲击激励及随机激励下的动态特性,结果表明:
(1) 当汽车受到路面冲击激励时,采用准零刚度隔振器作为汽车座椅悬架,人体各部分加速度响应峰值及所受峰值载荷比线性座椅悬架小,振动衰减时间短,整车乘坐舒适性得到有效改善;汽车悬架行程与线性座椅悬架变化趋势基本一致;座椅行程较大,但在允许的行程取值范围内。
(2) 当汽车受到路面随机激励时,采用准零刚度隔振器作为汽车座椅悬架,人体各部分加速度均方根值比线性座椅悬架小,整车乘坐舒适性得到有效改善;汽车悬架行程均方根值比线性座椅悬架小;座椅行程均方根值较大,但在允许的行程取值范围内。
[1] Alabuzhev P, Gritchin A, Kim L, et al. Vibration protecting and measuring systems with quasi-zero stiffness[M]. Hemisphere, New York, 1989.
[2] Ibrahim R A. Recent advances in nonlinear passive vibration isolators[J]. Journal of Sound and Vibration,2008,314(3): 371-452.
[3] 彭献,黎大志,陈树年. 准零刚度隔振器及其弹性特性设计[J]. 振动、测试与诊断,1997,17(4):44-46.
PENG Xian, LI DA-zhi, CHEN Shu-nian. Quasi-zero stiffness vibration isolators and design for their elastic characteristic[J]. Journal of Vibration, Measurement &Diagnosis, 1997, 17(4): 44-46.
[4] 张建卓,董申,李旦. 基于正负刚度并联的新型隔振系统研究[J]. 纳米技术与精密工程,2004,2(4): 314-318.
ZHANG Jian-zhuo, DONG Shen, LI Dan. Study on new type vibration isolation system based on combined positive and negative stiffness[J]. Nanotechnology and Precision Engineering, 2004, 2(4): 314-318.
[5] Carrella A, Brennan M J, Waters T P. Static analysis of a passive vibration isolation with quasi zero-stiffness characteristic[J]. Journal of Sound and Vibration, 2007, 301(3): 678689.
[6] 徐道临,张月英,周加喜,等. 一种准零刚度隔振器的特性分析与实验研究[J]. 振动与冲击,2014,33(11): 208-213.
XU Dao-lin, ZHANG Yue-ying, ZHOU Jia-xi, et al. Characteristic analysis and experimental investigation for a vibration isolator with quasi-zero stiffness[J]. Journal of Vibration and Shock, 2014, 33(11): 208-213.
[7] Zhou N, Liu K. A tunable high-static low-dynamic stiffness vibration isolator[J]. Journal of Sound and Vibration, 2010, 329(9):12541273.
[8] 路纯红,白鸿柏. 新型超低频非线性被动隔振系统的设计[J]. 振动与冲击,2011,30(1):234-236.
LU Chun-hong, BAI Hong-bai. A new type nonlinear ultra-low frequency passive vibration isolation system[J]. Journal of Vibration and Shock, 2011, 30(1): 234-236.
[9] 刘兴天, 孙靖雅, 肖锋,等. 准零刚度微振动隔振器的原理和性能研究[J]. 振动与冲击,2013,32(21):69-73.
LIU Xing-tian,SUN Jing-ya,XIAO Feng, et al. Principle and performance of a quasi-zero stiffness isolator for micro-vibration isolation[J]. Journal of Vibration and Shock, 2013, 32(21):69-73.
[10] 王毅,徐道临,周加喜. 滚球型准零刚度隔振器的特性分析[J]. 振动与冲击,2015,34(4):142-147.
WANG Yi, XU Dao-lin, ZHOU Jia-xi. Characteristic analysis of a ball-type vibration isolator with quasi-zero-stiffness[J]. Journal of Vibration and Shock, 2015, 34(4): 142-147.
[11] Wang Yong, Li Shun-ming, Cheng Chun, et al. Dynamic analysis of a high-static-low-dynamic-stiffness vibration isolator with time-delayed feedback control[J]. Shock and Vibration, 2015.
[12] Papalukopoulos C, Natsiavas S. Nonlinear biodynamics of passengers coupled with quarter car models[J]. Journal of Sound and Vibration, 2007, 304(1): 50-71.
[13] Choi S, Han Y. Vibration control of electrorheological seat suspension with human-body model using sliding mode control[J]. Journal of Sound and Vibration, 2007, 303(1):391-404.
[14] Zhao Y, Zhao L, Gao H. Vibration control of seat suspension usingH∞reliable control[J]. Journal of Vibration and Control, 2010, 16(12):1859-1879.
Dynamic characteristics of a vehicle-seat-human coupled model with quasi-zero-stiffness isolators
WANG Yong, LI Shunming, CHENG Chun
(College of Energy and Power Engineering, Nanjing University of Aeronautics and Astronautics, Nanjing 210016, China)
The contradiction between lowering natural frequencies and increasing load-bearing capacity existing in linear passive isolators can be overcome with quasi-zero-stiffness isolators. Here, quasi-zero-stiffness isolators were used for vehicle seat isolation. A vehicle-seat-human coupled model of 8-DOF considering quasi-zero-stiffness isolators was established. The dynamic characteristics of this coupled dynamic model under road shock excitation and random excitation were analyzed by using the numerical method. The results showed that when taking a quasi-zero-stiffness isolator as seat suspension, the vehicle ride comfort can be improved effectively, the vehicle suspension stroke and seat stroke are in the allowed stroke range. The study results provided a theoretical guidance for designing quasi-zero-stiffness isolators as seat suspensions.
quasi-zero-stiffness; nonlinear isolator; vehicle-seat-human coupled model; dynamic characteristics
江苏省研究生培养创新工程(KYLX_0243);中央高校基本科研业务费专项资金资助
2015-06-02修改稿收到日期:2015-07-26
王勇 男,博士生,1989年生
李舜酩 男,教授,1962年生
TB535;O322
A
10.13465/j.cnki.jvs.2016.15.032
猜你喜欢
青少年科技博览(中学版)(2022年11期)2023-01-07
汽车实用技术(2022年7期)2022-04-20
数学物理学报(2021年3期)2021-07-19
数学年刊A辑(中文版)(2021年2期)2021-07-17
数学物理学报(2021年2期)2021-06-09
北京汽车(2020年3期)2020-07-15
北方工业大学学报(2019年5期)2019-03-30
北京汽车(2016年6期)2016-10-13
科学启蒙(2016年7期)2016-08-06
汽车实用技术(2015年8期)2015-12-26