
浅析高压水射流工作站中多台机器人协同工作方法
2016-09-12 00:24林晓东李绍峰彤LINXiaodongLIShaofengLIUTong北京机械工业自动化研究所北京100120
制造业自动化 2016年8期
林晓东,李绍峰,刘 彤LIN Xiao-dong, LI Shao-feng, LIU Tong(北京机械工业自动化研究所,北京 100120)
设计与应用
浅析高压水射流工作站中多台机器人协同工作方法
林晓东,李绍峰,刘 彤
LIN Xiao-dong, LI Shao-feng, LIU Tong
(北京机械工业自动化研究所,北京 100120)
一些工厂受场地等因素限制,为了提高工作效率,采用单工位多机器人工作站,下面以三机器人水切割设备为例,从工作过程、协作方法等方面来详述此类系统的工作特点。实践证明,该系统工作稳定,生产效率高,达到了原设计的要求,对类似工作站的设计非常有借鉴意义。
多台机器人协作;水切割;现场总线
1 设备概述
机器人高压水射流工作站主要由三台倒挂机器人、封闭切割间、高压泵、负压吸附装置和控制系统组成。机器人控制各自独立的高压水刀协作完成对同一工件的切割,切割过程中的工件的固定,通过负压系统将其牢牢吸附在模架上来完成,由此保证了工件一致性,降低了废品率。设备自交付以来,客户反映良好。
1.1设备布局
1.2机器人安装方式
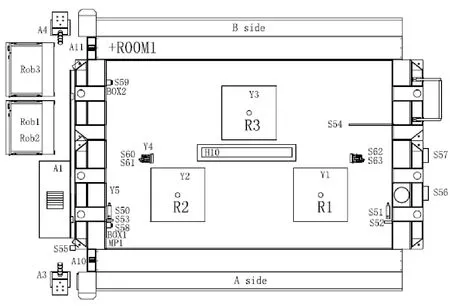
图1 设备布局图
机器人倒立安装于封闭操作间框架之上,其机器人工作范围可覆盖整个切割模架,并保证各机器人六轴上的水刀以最优姿态切割模架上的工件。

图2 设备视图
2 工作方式及过程
设备采用三台机器人协作工作方式,前后进退料口各设置一部卷帘门及一个控制盒,使切割工件在一个封闭的空间内进行,保证人员的安全。操作员可根据现场情况,通过控制柜上的触摸屏设置单面或双面工作方式,通过此设置,使设备可以灵活的配置人员及生产方式,方便了操作,提高了工作效率。
2.1单面工作方式
在设置有效侧上下料,操作员将待切工件放入工作台,按下负压启动按钮,负压吸附开始,待切割件被牢牢的吸附在模架上,操作员退出切割间,按下启动按钮,该侧卷帘门落下,机器人开始切割,待切割完成后,负压吸附自动停止,卷帘门升起,等待操作员取走切割完成的工件,之后放入待切割件,如此循环。
2.2双面工作方式
一侧上料,一侧下料。压机下来的待切割件从一侧放入工作间,整理放平后,按下吸附按钮,吸附开始,按下启动按钮,上料侧卷帘门落下,此时另一侧操作员同样按下吸附按钮,启动按钮,该侧卷帘门落下,机器人开始切割,切割完成后两侧卷帘门同时升起,下料侧操作员取走切割完成件,上料侧操作员放入待切割件,在两侧都完成启动程序后,机器人再次开始自动切割,如此循环。
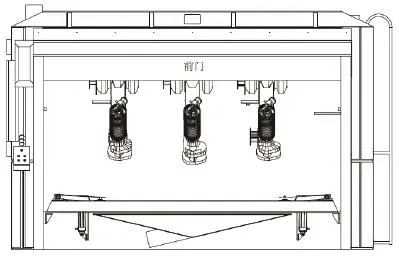
图3 设备正面视图
3 配置及连接
3.1机器人本体控制柜的选择
三台机器人本体控制柜可选择一拖三或三台独立的控制柜,现对其优缺点进行分析。
1)一拖三控制柜
即三台机器人本体由一台IRC5控制柜(本身带一组驱动单元)及两台驱动单元进行控制,此种配置方式三台机器人本体只能在同一示教器下工作,通过切换来完成对三台机器人本体的控制,只能单台一一动作。在自动运行时,机器人同步运行较好,不会出现个别机器人本体意外停止造成碰撞的问题。
2)三台独立的机器人控制柜
每台机器人本体使用独立的机器人控制柜,此种方式可三个人同时示教,单台机器人可独立运行;自动运行时,如信号交互不好,易造成碰撞。
采用三台独立的机器人须解决如下问题:
1)三台示教器在同时运行时的集中控制问题;
2)单台或其中两台机器人意外停止时的故障处理;
3)三台机器人的通讯一致性问题,如出现调用不同工件号则会造成碰撞。
综合考虑,经过评估,选择三台独立的机器人来完成协作切割。
3.2机器人与PLC连接
PLC采用通用强的西门子S7 300系列,PLC与机器人的通讯选择Profibus DP协议通信方式,具有可靠性高,兼容性强,数据量大,速度快等优点,便于三台机器人的同步运行。对其进行硬件配置前须将机器人厂家提供的GSD文件导入PLC库中,之后在硬件中选择相应的模块,完成在PLC中基于Profibus协议的硬件配置。DP总线上PLC作为主站,机器人作为从站。机器人间的通讯,通过PLC来进行中转。至此,PLC与机器人间的DP通讯网络建立完成。
3.3机器人间的备份通讯及信号的传递
机器人内置Devicenet总线,可利用其进行无PLC的三台机器人间互联,机器人通过本身内置的Devicenet总线直接访问其他两台机器人中的定义信号,实现脱离PLC条件下的彼此通讯,作为DP总线之外的备份总线,提高了系统的可靠性。
4 机器人安全保护及协作工作方式
4.1三台机器人同步运行方法
三台机器人联动运行时,须通过信号的链接使其成为一个整体,每台机器人时刻监控另外两台机器人的工作状态,如任一机器人出现故障,则该机器人本体会处于停止状态,正常工作的机器人如未对其监测,就可能造成机器人间的碰撞。而造成机器人意外停止的原因很多,因此需要通过PLC监测机器人信号来确认是否工作正常。由此解决了三台机器人运行的同步问题,防止了由于单台机器人的意外停止造成的碰撞。另外,使用安全继电器将三台机器人安全链串在一起,当一台机器人急停时,三台机器人会同时停止,保证安全。
4.2三台机器人同一区域内协作切割时的防撞保护
1)防撞方式的选择
三台机器人同步工作时,在机器人工作的重叠区域内可能会产生碰撞,因此需要采取措施来避免该危险情况的发生。
一般情况下,可通过设置机器人干涉区域的方法来实现,保证在干涉区域内只有一台机器人工作,在该机器人退出干涉区后,其他机器人才能进入,但由于三台机器人安装位置较近且机器人的切割区域重叠区较多,设置其干涉区域实现起来有难度,因此采用在程序中添加防撞命令的方式来实现防撞。
2)防撞命令的使用说明
当机器人进入到有可能与其他机器人碰撞区域前时,将防撞命令打开,此时该机器人检测防撞信号是否为0,如为0则等待,如为1则进入该区域,同时将防撞信号置0,在该机器人退出干涉区后,关闭防撞命令,此时防撞信号为1。通过此种防撞命令,编程人员可以在机器人任何可能产生碰撞位置前方便灵活的加入防撞命令,避免了机器人间的碰撞风险。
该防撞方式操作简便,设置方便,稳定可靠,经实践,得到了客户一致认可。
5 结束语
本文通过此倒挂三台机器人水切割设备论述了多台独立机器人的通讯及同步运行方法,阐述了多台机器人工作的区域内的防撞机制;作为范例对多机器人工作站的设计具有良好的借鉴意义。
[1] 崔坚.李佳.杨光.西门子工业网络通讯指南[M].北京.机械工业出版社,2005.
[2] 西门子(中国)有限公司.SIEMENS STEP7 5.4编程手册[Z].2008.
[3] 西门子(中国)有限公司.SIEMENS S7-300手册[Z].2008.
[4] ABB(中国)有限公司.System parameters手册[Z].
[5] ABB(中国)有限公司.机器人编程手册[Z].2005.
[6] ABB(中国)有限公司.Product Specification手册[Z].2005.
Analysis of multi robots cooperative work
method on high pressure water jet workstation
TP29
B
1009-0134(2016)08-0082-03
2016-03-14
林晓东(1975 -),男,吉林双辽人,电气工程师,学士,研究方向为电气设计。
猜你喜欢
中国设备工程(2022年21期)2022-11-24
军事文摘(2022年13期)2022-08-27
交通科技与管理(2022年8期)2022-05-07
机械工程师(2022年3期)2022-03-24
消防界(电子版)(2022年3期)2022-03-18
科技风(2019年26期)2019-10-16
当代旅游(2019年3期)2019-09-19
中国特种设备安全(2019年4期)2019-05-20
通信电源技术(2018年12期)2018-02-16
科学与财富(2017年24期)2017-09-06
