
基于多技术融合的地铁列车障碍物检测系统设计
2016-09-12 00:24Designofsubwaytrainobstacledetectionsystembasedonmultitechnologyintegration
制造业自动化 2016年8期
Design of subway train obstacle detection system based on multi-technology integration
黄 涛,吕红强,王 维HUANG tao, LYU Hong-qiang, WANG wei(中车南京浦镇车辆有限公司,南京 210031)
基于多技术融合的地铁列车障碍物检测系统设计
Design of subway train obstacle detection system based on multi-technology integration
黄 涛,吕红强,王 维
HUANG tao, LYU Hong-qiang, WANG wei
(中车南京浦镇车辆有限公司,南京 210031)
无人驾驶列车是今后城市轨道交通的发展方向,实现对无人驾驶列车轨道前方的障碍物的自动检测与识别是实现列车无人驾驶的一个非常关键的技术,基于激光雷达、红外摄像机、3D摄像机、无线电雷达、超声波传感器等多技术融合的地铁列车障碍物识别系统克服以上单一传感器检测技术的不足,实现无人驾驶列车前进方向轨道内障碍物的高效检测与识别,可以在不同气候、不同天气、不同环境下都可以正常工作,提高了无人驾驶运营列车的安全性。
城市轨道交通;无人驾驶;障碍物检测;激光雷达;红外摄像机;3D摄像机;无线电雷达;超声波传感器
0 引言
目前国内地铁列车基本都采用有人驾驶运行方式,由司机操作列车并负责瞭望列车运行前方轨道确保无障碍物落入轨道区间,随着城市轨道交通技术的发展,国内一些大城市提出建设全自动无人驾驶地铁列车,提高运行效率。2014年8月,国内首条全自动无人驾驶线路上海10号线开通运营,其无人驾驶列车车头下方安装了一个基于机械触发原理的障碍物检测系统用于代替司机对前方线路瞭望功能,其基本原理是在列车高速运行中撞到障碍物后将触发列车车头下方安装的机械行程杆运动,进而触发继电器开关电路,使列车紧急停车。该方案存在明显不足之处,即不能对列车前进方向轨道内的障碍物实现提前检测与预警,提高行车安全,另一方面通过机械的碰撞实现障碍物的检测不可避免地对车辆设备造成损伤。本文提出了一种基于激光雷达、红外摄像机、3D摄像机、无线电雷达、超声波传感器等多技术融合的障碍物识别系统对轨道中存在的异常物体进行检测和识别,该系统安装在无人驾驶列车车头前方,列车运行中各种传感器同时工作,将采集数据发送到障碍物处理主机由主机进行智能分析处理判断是否为障碍物以及障碍物的距离。
1 障碍物检测系统的构成
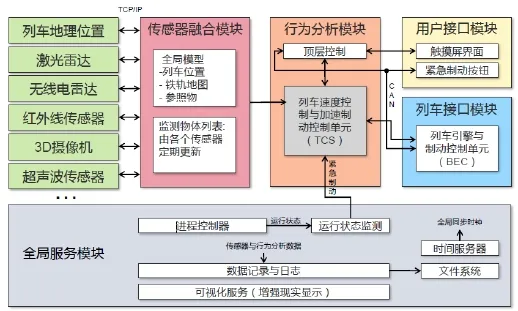
图1 多技术融合的障碍物检测系统结构
多技术融合的障碍物检测系统主要由五大模块组成(如图1所示),分别为传感器及传感器融合模块、行为分析模块、用户接口模块、列车接口模块、全局服务模块。

图2 传感器检测效果矩阵
传感器及传感器融合模块主要进行列车运行前方环境数据的采集和整合,并将采集的障碍物按照障碍物、参照物、无关物进行分类列表建立数据库。由于地铁列车运行环境复杂,对列车运营安全性要求较高,单一传感存在不足(如图2所示),通过多种传感器技术相互融合的技术可以很好的克服单一传感器技术的不足,提高系统的检测效果。
行为分析模块主要通过周期性的采集传感器融合模块检测到的障碍物信息进行列车运行控制操作,比如列车加速、减速控制等;
用户接口模块主要是一台触摸显示器,该显示屏提供列车基本的运营状态信息,以及列车前方障碍物、参照物、无关物体信息清单,并设有一个紧急制动停车按钮,主要在调试期间使用。
列车接口模块主要为列车的牵引和制动控制单元,其主要为车辆牵引动力单元和列车制动停车控制单元两个部分组成。
全局服务模块为障碍物检测系统的上位管理主机主要用于障碍物检测系统的运行信息存储和运行状态的检测和管理。
2 系统软件设计
多技术融合的障碍物检测系统基于研华成熟的Mini-ITX工控硬件平台设计,软件采用Jave语言进行开发,每个传感器设一个独立的线程,每个传感器数字信号处理及数据融合点设有一个独立的线程,每个障碍物的触发处理设一个独立的线程,每个线程通过一个共享的全局模型数据结构进行数据交换和传递,具体的软件系统结构如图3所示。

图3 系统软件架构
【】【】
3 试验结果
为了验证系统的可行性和有效性,对所设计的系统进行了实际路况测试,检验系统的工作效果。多技术融合的障碍物检测系统的显示器设有各种传感器模式下采集的图形信息,图4为激光雷达识别出轨道旁边电线杆,并计算出电线杆的距离。图5为红外线传感器识别出轨道内的异常物体。
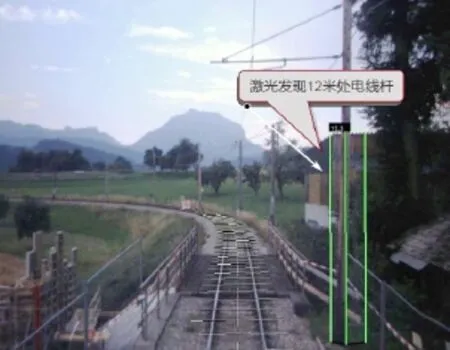
图4 激光雷达传感器工作效果图
4 结束语
本文通过基于激光雷达、红外摄像机、3D摄像机、无线电雷达、超声波传感器等多技术融合的地铁列车障碍物识别系统,克服单一传感器技术检测的不足,实现列车前方障碍物的实时检测,代替了司机的瞭望值守功能,比目前上海十号线机械式的障碍物检测系统在技术手段上更先进,有效提高了列车运行的安全性,但是目前该障碍物检测系统技术还存在不足,比如在复杂的光照和雨雪天气下会对系统的检测精度和检测距离产生不良影响,并存在障碍物误报问题,因此需要在以后的工作中进一步的完善各种传感器数据处理算法,提高系统对障碍物检测的精度和可靠性。

图5 红外传感器工作效果图
[1] 朱翔,王大庆.城市轨道交通无人驾驶技术的若干应用问题[J].城市轨道交通研究,2006,9(12):36-38.
[2] 柴贵兰.列车自动控制系统的分析与研究[J].科技信息,2010,(17):79-79,49.
[3] 范立南,韩晓微,张广渊.图像处理与模式识别[M].北京:科学出版社,2007.
[4] 邓志红,刘明阳,付梦印.一种改进的视觉传感器与激光测距雷达特征匹配点提取算法[J].光学技术,2010,36(1):43-47.
TP391
B
1009-0134(2016)08-0059-03
2016-05-27
黄涛(1981 -),男,江苏南京人,高级工程师,本科,主要从事列车网络控制系统研发工作。
猜你喜欢
北京测绘(2022年5期)2022-11-22
作文小学中年级(2022年9期)2022-09-08
汽车观察(2021年8期)2021-09-01
科学(2020年3期)2020-11-26
小哥白尼(军事科学)(2020年8期)2020-05-22
动漫界·幼教365(中班)(2020年3期)2020-04-20
铁道通信信号(2020年9期)2020-02-06
创新作文(1-2年级)(2019年4期)2019-10-15
中国交通信息化(2019年1期)2019-03-26
电子制作(2018年16期)2018-09-26
