
利用摄影基线改进SIFT算法
2016-09-08 02:11崔建军李亚东张晓栋张韶华范冬娟
测绘通报 2016年8期
崔建军,李亚东,张晓栋,罗 想,张韶华,范冬娟
(1. 长安大学地质工程与测绘学院,陕西 西安 710054; 2. 解放军信息工程大学测绘学院,河南 郑州 450052; 3. 73608部队,江苏 南京 210028)
利用摄影基线改进SIFT算法
崔建军1,李亚东1,张晓栋1,罗想1,张韶华2,3,范冬娟3
(1. 长安大学地质工程与测绘学院,陕西 西安 710054; 2. 解放军信息工程大学测绘学院,河南 郑州 450052; 3. 73608部队,江苏 南京 210028)
影像匹配是利用航空影像获取同名点和DEM的关键技术之一,而大倾斜影像的匹配问题也是目前匹配技术发展的难点。针对这一问题,本文研究了SIFT和ASIFT算法,并基于航空影像之间的摄影基线对ASIFT算法进行了改进,在成像模型中加入倾斜角度和平移变量,在一定程度上解决了大倾斜航空影像的自动匹配问题,并给出了试验结果。
影像匹配;同名点;ASIFT;航空摄影基线;成像模型
随着国民经济和遥感技术的发展,由于无人机遥感平台具有成本低廉、机动灵活、快速响应、能够承担高风险航空摄影任务和获取高分辨率影像等优点,其应用已经逐渐渗透到民用领域的各个方面。与之相应的,如何对无人机获取的遥感影像进行处理,从中提取有效的信息数据也得到越来越多的研究。近年来,利用SIFT算法进行影像匹配的研究得到越来越多的重视,因为其具有一定的仿射不变性[1-3],也逐渐在无人机影像上得到了应用[4-7]。但是由于无人机遥感平台体积和重量都比较小,极易受到气流影响,导致其姿态很不稳定,影像的倾斜较大,此时SIFT方法也难以取得好的效果。针对这一问题对SIFT算法进行了深入的研究,并分析了图像变形产生的主要原因,从构像方程入手,在图像匹配过程中考虑相机姿态引起的图像变形,进而改进了SIFT算法。
一、Base-ASIFT
针对SIFT算法的局限性把相机姿态的变化引入到算法中,根据成像方程对图像进行重采样,尽可能恢复两张倾斜图像之间的可推导关系,进而改进了SIFT算法的匹配流程,最终实现了具有较大倾斜的两幅图像之间良好的匹配效果。
1. 相机的姿态
所谓相机姿态指的是相机在对目标进行成像时的位置、转角等参数值。通常情况下,相机获取目标的影像主要有两种形式:一是相机在以被拍摄对象为球心,拍摄距离为半径的球面上运动获取影像,这种情况通常出现在一般的对地面景物进行拍摄的过程中,如图1所示;二是相机沿着某一基线进行移动以获取目标的影像,这种情况通常出现在航空摄影或地面近景摄影等专业处理过程中,如图2所示。

图1 相机围绕被拍摄对象移动
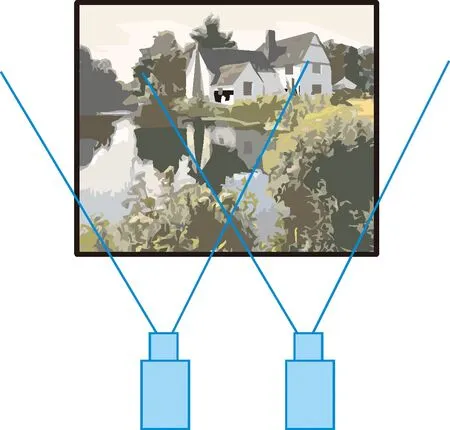
图2 相机沿某一基线移动
不论是哪一种情况,对每一次成像的过程可以表示为[8]
u=S1G1ATu0
(1)
式中,u表示经过成像的数字图像;而u0表示被拍摄对象的一个正面视图;T和A分别表示由于相机移动而产生的平面位移和仿射投影;G1表示高斯卷积,反映了光学模糊过程;S1表示位于一个规则格网上的标准采样算子。
2. 算法描述
针对图1所示的情况,Jean-MichelMorel等给出了详细的解决方案[8],即以式(1)表示的成像模型为基础,把待匹配的两幅影像分别看成是相机在以被摄目标为中心、摄影距离为半径的球面上的成像,这样就可以通过球面极坐标的两个角度(θ,φ)和相机自身的旋转角度ω来确定相机成像时的倾斜矩阵A(实际上也就是相机成像时的旋转矩阵),即
A=HγR1(ω)TtR2(φ)=

(2)
文献[8]中即以该式为基础,把两幅图像分别按照一定的间隔对θ、φ、ω3个角度进行循环,对于每一组角度利用式(1)得到倾斜后的图像,并对这一系列图像两两组合进行匹配,最后统计匹配成功的同名点。
ASIFT算法能够很好地处理一般的大倾斜影像,但对于两幅沿着某一条基线获取的航空影像对,由于其平移和旋转的情况都不同于一般的倾斜影像对,因此简单采用ASIFT算法也不能取得很好的效果,本文借鉴文献[8]的思路,针对图2的情况对式(2)和整个计算流程进行了修改。
(1) 旋转
航空摄影的处理过程中,相机的旋转是围绕着像主点和主光轴进行的,如图3所示。其中,θ、φ、ω3个角度都是像方角度[9],而ASIFT算法中的旋转角度是物方角度,如图4所示。
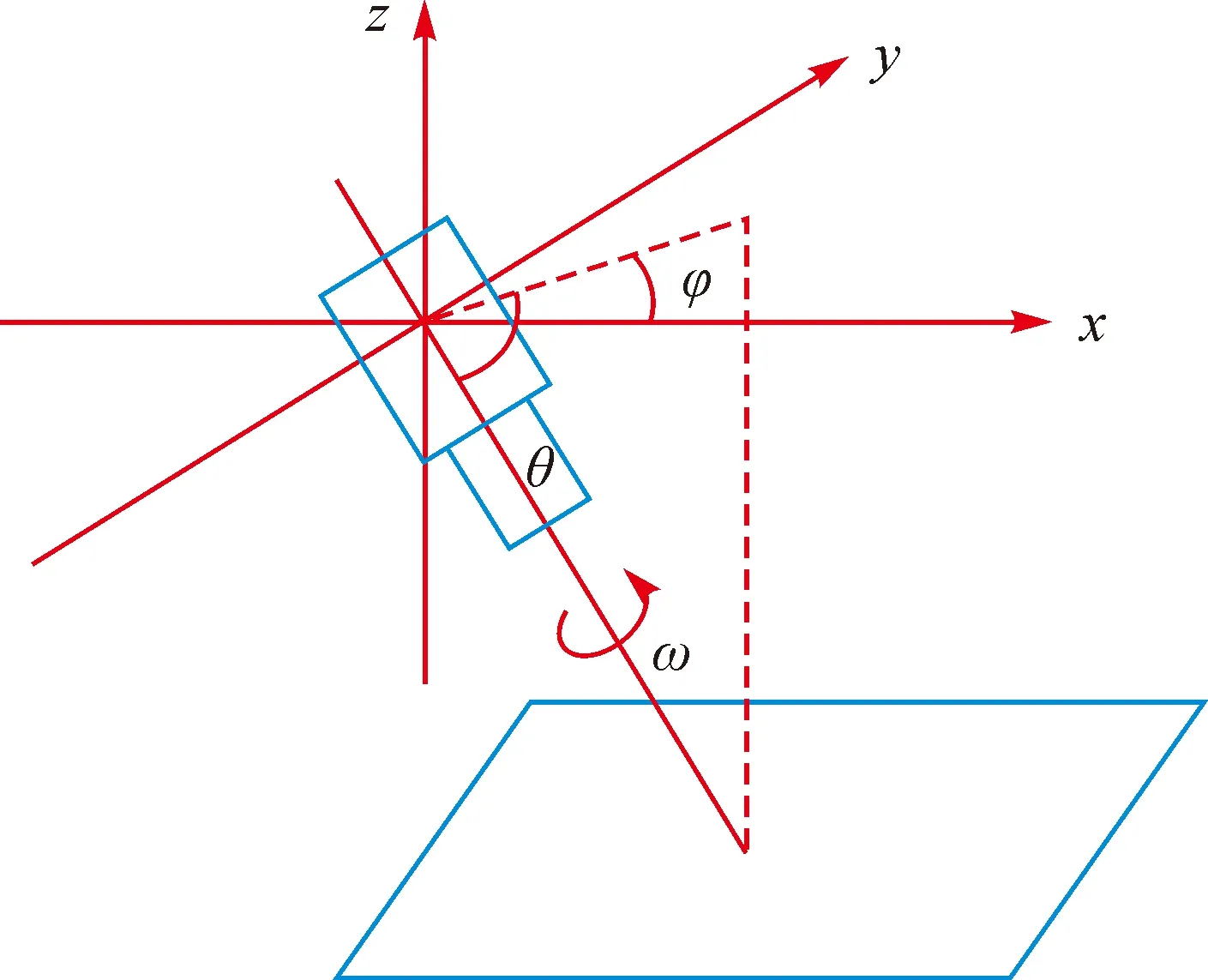
图3 航空摄影的相机旋转

图4 ASIFT中的倾斜角
因此如果要引用式(2)来推算倾斜影像,就必须把像方角度转换到物方角度,根据图3和图4的比较,可以得到计算式如下
(3)
将式(3)代入式(2),则可以得到

(4)
其中
(2) 平移
航空影像是按照某一条基线获取的序列影像,这与一般的影像对不同,如图5所示。

图5 航空影像对之间的关系
图5中S1的坐标为(X1,Y1);S2的坐标为(X2,Y2),则存在如下的平移公式
将其转换为极坐标方程
式中,L为基线的长度;α为基线与左像空间(S1处获取的影像空间)坐标系中X轴的夹角。对于两幅图像而言,设在S1处获取的影像为F(x,y),S2处获取的影像为F′(x′,y′)。则有
F′(x′+y′)=F(x+L·cosα,y+L·sinα)
(5)
根据式(4)和式(5),式(1)的成像模型可以修改为如下的形式
u′=S1G1A′Tu0(x+L·cosα,y+L·sinα)
(6)
式中,A′根据式(4)产生。式(6)为修改后的成像模型。图6为根据修改后的成像模型对两幅影像进行匹配的流程。
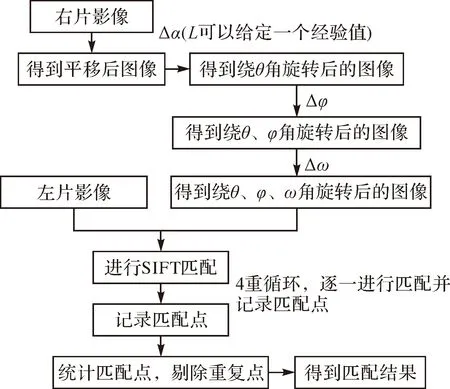
图6 Base-SIFT方法匹配流程
二、试 验
分别采用SIFT、ASIFT、Base-ASIFT这3种算法对一些在不同角度拍摄、具有较大倾斜的图像进行了试验并作了比较。图7显示了分别用3种算法进行试验的情况,其中白点代表匹配的同名点。
在这个试验中,虽然采用SIFT算法也匹配了318个同名点,但这些点都是错误的,ASIFT 算法得到了825个同名点,和Base-ASIFT算法相差不多,但其正确率却明显低于Base-ASIFT算法(见表1)。

表1 试验结果
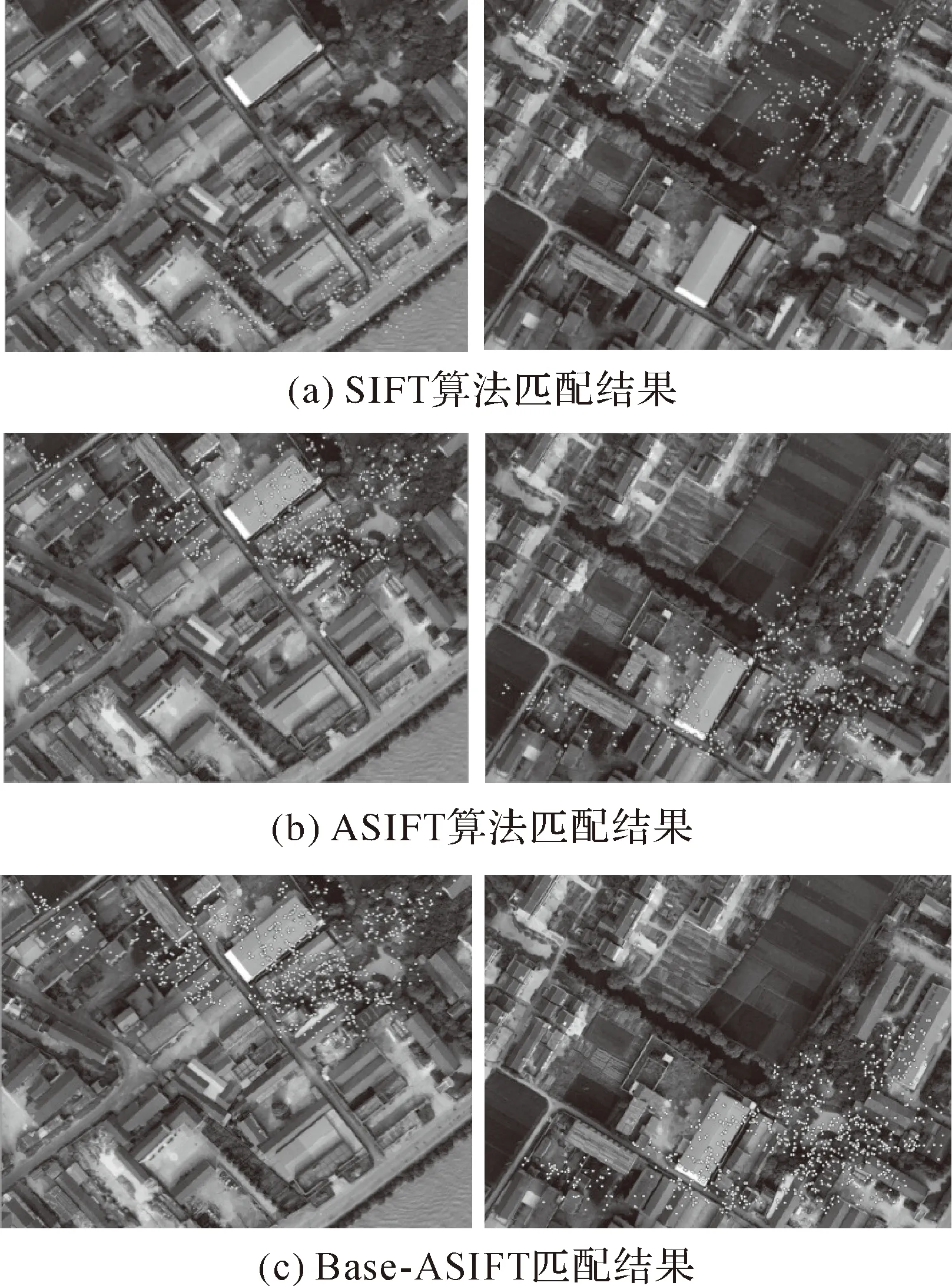
图7 3种算法的匹配结果比较
试验结果显示,对于倾斜航空影像来说,Base-ASIFT算法能够得到更好的匹配结果,但其匹配速度和效率还有待于进一步提高。
三、结束语
本文针对航空影像的特点,在ASIFT算法的基础上加入基线平移变量,并按照航空摄影的相机姿态情况修改了ASIFT中的倾斜矩阵,然后以一幅图像为基准,与另一幅经过重采样后的一系列影像分别进行匹配计算,最后得到两张倾斜较大的航空影像上的同名像点。试验表明该算法比ASIFT方法更能适应航空影像的处理需求,能较好地解决大倾斜图像之间的匹配问题,对无人机影像的处理具有一定的价值。此外,该算法需要对一批模拟影像分别进行SIFT计算,因此运算速度较慢,虽然在采用SURF算法后速度有所提高,但如果要满足数据实时处理的要求,还需要进一步提高算法的计算效率。
[1]LOWEDG.DistinctiveImageFeaturesfromScale-invariantKeypoints[J].InternationalJournalofComputerVision(IJCV),2004, 60(2):91-110.
[2]LUOJuan,GWUNAO.ComparisonofSIFT,PCA-SIFTandSURF[J].InternationalJournalofImageProcessing(IJIP),2010, 3(4):143-152.
[3]于丽莉,戴青.一种改进的特征匹配算法[J].计算机工程,2011,37(2):210-212.
[4]何敬,李永树,鲁恒,等.基于特征点的无人机影像拼接方法研究[J].光电工程,2011, 38(2):122-126.
[5]宫阿都,何孝莹,雷添杰,等.无控制点数据的无人机影像快速处理[J].地球信息科学学报, 2010, 12(2):254-259.
[6]何孝莹,岳建伟,张栩然.基于算法的无人机影像快速匹配[J].计算机工程,2011, 37(7):216-218.
[7]陈裕.基于SIFT算法的无人机遥感图像配准[D].长沙:中南大学, 2009.
[8]MOREL J M,YU G S.ASIFT: A New Framework for Fully Affine Invariant Image Comparison.[J].SIAM Journal on Imaging Sciences, 2009, 2(2):438-469.
[9]刘静宇.航空摄影测量学[M].北京:解放军出版社, 1995.
An Improved SIFT Algorithm Based on Photography Baseline
CUI Jianjun,LI Yadong,ZHANG Xiaodong,LUO Xiang,ZHANG Shaohua,FAN Dongjuan
2015-07-24;
2015-10-12
崔建军(1975—),男,博士,副教授,主要研究方向为计算机图形图像处理,数字摄影测量与遥感应用。E-mail:stonecui@chd.edu.cn
P23
B
0494-0911(2016)08-0062-03
引文格式:崔建军,李亚东,张晓栋,等.利用摄影基线改进SIFT算法[J].测绘通报,2016(8):62-64.DOI:10.13474/j.cnki.11-2246.2016.0257.
猜你喜欢
资源信息与工程(2021年5期)2022-01-15
西江月(2021年3期)2021-12-21
科学(2020年5期)2020-11-26
中国惯性技术学报(2019年3期)2019-10-15
航空知识(2019年1期)2019-01-11
环球飞行(2018年7期)2018-06-27
连环画报(2016年10期)2016-12-16
舰船电子对抗(2016年5期)2016-12-13
中国非金属矿工业导刊(2015年5期)2015-12-22
中国光学(2015年1期)2015-06-06
