
宽巷组合下的cGNSS-R测高算法
2016-09-08 02:11王娜子鲍李峰
测绘通报 2016年8期
王娜子,鲍李峰,高 凡
(1. 中国科学院测量与地球物理研究所大地测量与动力学国家重点实验室,湖北 武汉 430077;2. 中国科学院大学,北京 100049)
宽巷组合下的cGNSS-R测高算法
王娜子1,2,鲍李峰1,高凡1,2
(1. 中国科学院测量与地球物理研究所大地测量与动力学国家重点实验室,湖北 武汉 430077;2. 中国科学院大学,北京 100049)
传统的GNSS反射信号(cGNSS-R)测量湖面和海面的高度具有较高的时空分辨率,因此可以作为验潮站使用,它是一种监测海洋潮汐及海平面变化的新手段。本文提出了一种基于L1-L2宽巷观测量组合的GNSS-R测高新算法。该算法的优点是:利用宽巷的方法可以用码与相位的双频观测值来快速确立需求的整周模糊度。为验证该方法,在武汉市东湖清河桥上做了试验,并利用所得观测量,按照该新算法解算了接收机到湖面的高度。通过试验分析,RMS显示其精度可以达2~3 cm。
GNSS-R测高;宽巷组合;湖面高度
自1993年Martin-Neira[1]提出可利用经反射的GPS信号来探测海面状况以来,GNSS-R技术得到了一定的发展。应用方面已经从最初的测湖面或海面[2]的高度扩展到测海冰[3]、海风[4-5]、土壤湿度[6-8]、积雪厚度[9]等各方面。而在测高方面,相对于传统的验潮站或卫星测高,GNSS-R测高具有高时间和空间分辨率的优势,可以同时测量大量非星下点或非验潮站下点的海面高度。在海面或湖面测高上,已从最初的岸基GNSS-R测高扩展到机载[10-11]甚至正在发展的星载GNSS反射接收机设备来测量高度。它是利用GNSS反射天线(左旋极化天线)[12]收集经湖面或海面反射的信号,并联合GNSS直射天线(右旋极化天线)接收到的直射信号及几何位置信息来得到湖面或海面的高度的。
目前,根据所使用的反射信号接收机设备的不同,GNSS-R测高可以分为干涉GNSS-R测高(iGNSS-R)和传统的GNSS-R测高(cGNSS-R)。iGNSS-R大多是利用自主研发的GNSS接收机[13-15],将接收的直射和反射信号进行相关处理,并利用相关波形功率得到两个信号的时间延迟[16-17],再根据几何关系得到湖/海面高度信息。该方法直接得到时间延迟,没有除海面高度外的其他未知数,求解简单,测高时间分辨率是由采样率决定的,单颗卫星的反射信号只要被接收机接收就可以得到相应湖/海面上点的高度,因此,测高的空间分辨率是由接收到的卫星决定的。但是,该方法所需接收机比较复杂,目前为止,还没有公开商用的接收机。而cGNSS-R则是利用传统的大地测量型接收机[18-19]分别接入直射和倒置的反射天线来接收信号,最终的数据格式是传统的RENIX格式,观测量是直射和反射传播路径的码伪距和相位伪距,利用传统的单差或双差数据处理方法和几何关系得到湖/海面的高度。该方法的优点是接收机简单,数据处理简单。但是,利用传统的数据处理方法,需要先确定整周模糊度,并且在计算的过程中有湖面高度和接收机钟差两个未知数,因此一般会采用多颗卫星长时间观测,并采用最小二乘法来得到一个湖/海面高度,这样就大大降低了GNSS-R的时空分辨率。但是,笔者之前已经做了大量的工作来改进这个不足,应用了新的方法提高了时间分辨率,并且在设备中加入了外接原子钟,使得cGNSS-R测高具有和IGNSS-R测高同样的时空分辨率。如何快速确定整周模糊度是该方法的主要关键步骤,传统的确立整周模糊度的算法比较复杂,并且要求对信号的长期连续接收。因此,笔者采用新的快速确立整周模糊度的算法,该算法简单且易于实现。
一、算 法
cGNSS-R是利用垂直放置的朝上的直射天线和朝下的反射天线来接收直射路径和反射路径信息的。反射路径相当于卫星到达反射天线水下投影点的直射路径,即可以将该种测量方法看成是短基线的GNSS来确定基线长度(2h+d),已知d的值,且直射天线大地坐标系下的位置也已知,则可以得到反射点的湖/海面高度。因此本文主要的求解是为了得到h的值。
图1为cGNSS-R的测量示意图。其中朝上的为右旋天线,用于接收直射信号,朝下的为左旋天线,用于接收经水面反射的信号,并且它们的相位中心是在一条铅垂线上。通过上述两天线接收到的观测量,可以解算出反射天线相位心中到水面的距离h。

图1 cGNSS-R测高示意图
从图1可以看出,反射路径的长度等于卫星到射天线水下镜面点的距离。因此
ρr-ρd=(2h+d)sinθ
(1)
式中,ρr是反射信号路径的长度;ρd是直射信号路径长度;d是直射天线与反射天线的垂直距离;θ为
卫星高度角。来自卫星1的直射信号L1载波相位观测方程为
(2)
来自卫星1的反射信号L1载波相位观测方程为
(3)
式中,λ1为对应的GPSL1载波相位波长;δtrr为反射接收机的接收机钟差;δtrd为直射接收机的接收机钟差;δts1为卫星1的卫星钟钟差;c为光速。式中变量的上标用来区分卫星1与卫星2,而下标数字用来代表L1、L2载波,字母则用来代表反射信号与直射信号;N为整周模糊度;δT为对流层误差;δl为电离层误差。由于两接收机相距较近,因此直射路径和反射路径的差值可以忽略电离层和对流层误差的影响,下面的方程中忽略这两项。
联合式(1)—式(3),以及L2载波的观测方程可以得到
(4)
(5)
L1载波—L2载波组成宽巷,即式(4)减去式(5)可得

(6)
同样的,可以得到2号卫星的类似于L1和L2组合方程
(7)
联合式(6)和式(7),整理后则可以得到基于宽巷的GNSS-R测高计算公式
(8)
令
(9)
下面可以利用双频相位伪距和码伪距的数据组合[20]来确定式(9)的4个宽巷整周模糊度,即
(10)
式中,N21=N1-N2;Ø1=λ1L1;Ø2=λ2L2;f1、f2为对应于载波L1和L2的载波频率;R1为对应于L1的码伪距除以波长;R2为对应于L2的码伪距除以波长。
由式(10)分别对式(9)中4项进行每个历元的计算,为了消除多路径的影响,在较长时间内取平均[20],最后将所得的均值代入式(8),则每一历元的h可解。
二、试验结果分析
试验于2015年5月31日在武汉市东湖清河桥进行,如图2(a)所示。
Trimble GNSS R8的GNSS接收机朝上放置,而Leica AR20左旋极化天线朝下放置。其中,Leica AR20天线所连接的接收机的型号为Leica GR10,数据采样率为1 Hz。
图2(b)中给出了接收机所安置位置的地图。东湖是中国最大的城中湖,水域宽广且平静。从地图中可以看出,清河桥两侧都是开阔的湖水,桥身大致为东西走向。天线架设于桥的南侧,因此在处理数据中,只有方位角为70°~200°之间的观测数据才视为有效数据。为了保证数据精度,截止高度角设为10°。
在GNSS-R设备观测的同时,将三角棱镜置于水面,由电子全站仪依据三角高程测量原理量测得到h的值为5.92 m。

图2 仪器架设及清河桥所处位置
图3为经式(10)所得的4个整周模糊度浮点解的时间序列图,将上述4个序列分别取平均和取整后得到4个整周模糊度,并代入式(8)解算出湖面高度。对于PRN09和PRN19两颗卫星,4个宽巷整周模糊度分别为-126、4、-88和-51。这种计算方法相对于之前传统的求解整周模糊度的方法要简单易行。
图4给出了宽巷及单频算法的结果。表1给出了其数据统计情况。宽巷结果的精度跟单独解算L1和L2相当,都为2~3 cm,说明宽巷方法是有效的。稍有差别的原因可能是在解算中,由宽巷确定整周模糊度时利用的是C/A码和P2码,而不是P1和P2码,C/A码的精度较低,对结果会产生一定的影响。此外,在解算过程中,没有考虑其他误差影响,如两个接收机天线的相位中心偏差等。

图3 由试验数据得到的PRN09和PRN19号卫星式(12)中的4个变量的每一历元的值
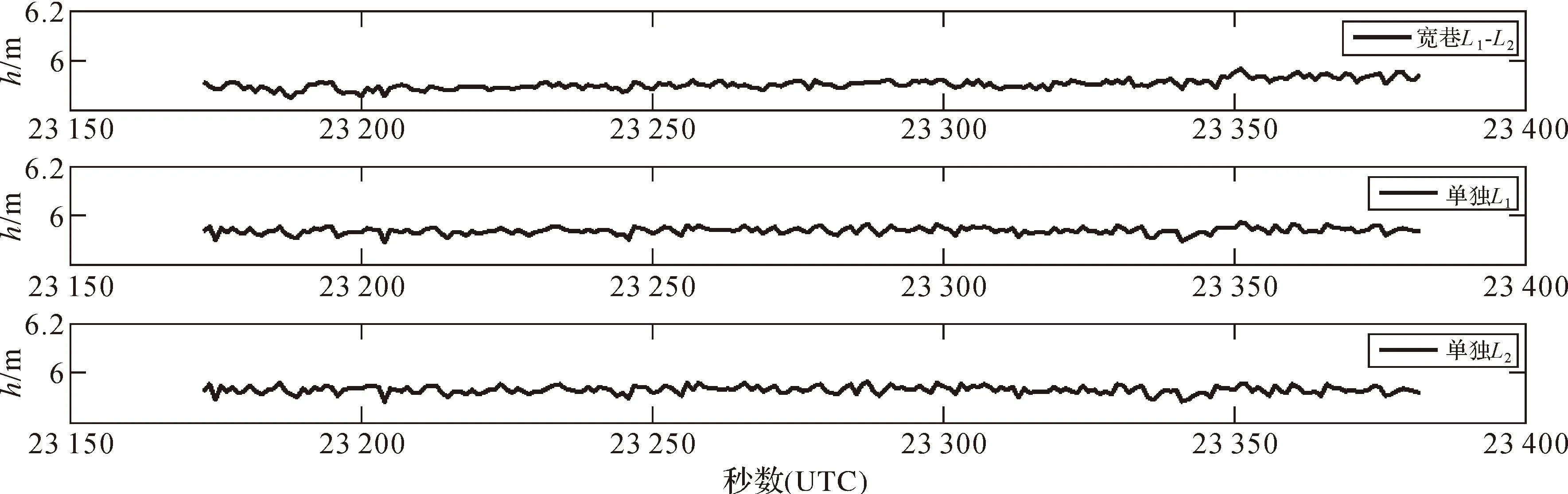
图4 宽巷及单频算法结果

方式均值/mSTD/cmRMS/cm宽巷5.90401.992.56L15.93761.362.23L25.93071.561.89
表1中,STD是由各数据序列的均值,而RMS是相对于电子全站仪测量结果5.92m计算的。
电子全站仪测量结果为5.92m。
三、结束语
本文提供了一种新的cGNSS-R测高的计算方法,将L1载波与L2载波组成宽巷组合来解算湖面高度,利用码伪距和相位伪距来快速确定宽巷整周模糊度。试验表明,该方法有效,结果正确,与单独处理载波数据相比具有相当的测量精度。
[1]MARTIN-NEIRAM.APassiveReflectometryandInterferometrySystem(PARIS):ApplicationtoOceanAltimetry[J].EcologicalSocietyofAmericaJournal, 1993, 17(4): 331-355.
[2]TREUHAFTRN,LOWEST,ZUFFADAC,etal. 2-cmGPSAltimetryoverCraterLake[J].GeophysicalResearchLetters, 2001, 28(23): 4343-4346.
[3]KOMJATHYA,MASLANIKJ,ZAVOROTNYVU,etal.SeaIceRemoteSensingUsingSurfaceReflectedGPSSignals[R]. [S.l.]:IGARSS, 2000: 2855-2857.
[4]ZAVOROTNYVU,VORONOVICHAG.ScatteringofGPSSignalsfromtheOceanwithWindRemoteSensingApplication[J].IEEETransactionsonGeoscienceandRemoteSensing, 2000, 38(2): 951-964.
[5]ZUFFADAC,ELFOUHAILYT,LOWES.SensitivityAnalysisofWindVectorMeasurementsfromOceanReflectedGPSSignals[J].RemoteSensingofEnvironment, 2003, 88(3): 341-350.
[6]KATZBERGS,TORRESO,GRANTM,etal.UtilizingCalibratedGPSReflectedSignalstoEstimateSoilReflectivityandDielectricConstant:ResultsfromSMEX02[J].RemoteSensingofEnvironment, 2006, 100(1): 17-28.
[7]CHEWC,SMALLEE,LARSONKM.AnAlgorithmforSoilMoistureEstimationUsingGPS-InterferometricReflectometryforBareandVegetatedSoil[J].GPSsolutions,2015: 1-13.
[8]宋学忠,徐爱功,杨东凯,等.GNSS反射信号在土壤湿度测量中的应用[J]. 测绘通报, 2013(11): 61-64.
[9]CARDELLACHE,FABRAF,NOGUES-CORREIGO,OliverasS,etal.GNSS-RGround-basedandAirborneCampaignsforOcean,Land,IceandSnowTechniques:ApplicationtotheGOLD-RTRDatasets[J].RadioScience, 2011, 46(6): 3604-3629.
[10]LOWEST,LABRECQUEJL,ZUFFADAC,etal.FirstSpaceborneObservationofanEarth-reflectedGPSSignal[J].RadioScience, 2002, 37(1):7-1.
[11]GARRISIONJL,KATZBERGSJ,HILLMI.EffectofSeaRoughnessonBistaticallyScatteredRangeCodedSignalsfromtheGlobalPositioningSystem[J].GeophysicsResearchLetters, 1998, 25(13):2257-2260.
[12]HELMA.Ground-basedGPSAltimetrywiththeL1OpenGPSReceiverUsingCarrierPhaseDelayObservationsofReflectedGPSSignals[R]. [S.l.]:GFZ,ScientificTechnicalReportSTR, 2008.
[13]ARMATYSM,KOMJATHYA,AXELRADP,etal.AComparisonofGPSandScatterometerSensingofOceanWindSpeedandDirection[C]∥IEEE2000International.[S.l.]:IGARSS,2000:2861-2863.
[14]KELLEYC.Internet-basedOpenSourceSoftwareforLearningaboutGPS[J].GPSSolutions, 2002, 6(3):201-205.
[15]CAPARRINIM,EGIDOA,SOULATF,etal.Oceanpal®:MonitoringSeaStatewithaGNSS-RCoastalInstrument[R].[S.l.]:IGARSS,2007.
[16]MARTIN-NEIRAM,D’ADDIOS,BUCKC,etal.ThePARISOceanAltimeterIn-OrbitDemonstrator[J].IEEETransactionsGeoscienceandRemoteSensing, 2011, 49(6): 2209-2237.
[17]CAMPSA,PARKH,VALENCIAID,etal.OptimizationandPerformanceAnalysisofInterferometricGNSS-RAltimeters:ApplicationtothePARISIoDMission[J].IEEEJournalofSelectedTopicsinAppliedEarthObservationsandRemoteSensing, 2014, 7(5):1436-1451.
[18]LOFGRENJS,HAASR,JOHANSSONJM.High-rateLocalSeaLevelMonitoringwithaGNSS-basedTideGauge[R]. [S.l.]:IGARSS, 2010.
[19]LOFGRENJS,HASSR,JOHANSSONJM.MonitoringCoastalSeaLevelUsingReflectedGNSSSignals[J].AdvancesinSpaceResearch, 2011(47):213-220.
[20]霍夫曼·韦伦霍夫,里希特内格尔,瓦斯勒.全球卫星导航系统GPS,GLONASS,GALILEO及其他系统[M].北京: 测绘出版社, 2009: 156-179.
An Algorithm for cGNSS-R Altimetry Based on the Wide-lane Combination
WANG Nazi,BAO Lifeng,GAO Fan
10.13474/j.cnki.11-2246.2016.0245.
2015-10-27
国家自然科学基金(41321063;41274050;41374021)
王娜子(1987—),女,博士生,主要从事GNSS-R测高研究。E-mail:wnz@asch.whigg.ac.cn
P228.3
B
0494-0911(2016)08-0006-04
引文格式:王娜子,鲍李峰,高凡.宽巷组合下的cGNSS-R测高算法[J].测绘通报,2016(8):6-9.
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
特区文学·诗(2021年6期)2021-12-22
疯狂英语·读写版(2021年8期)2021-09-17
红蜻蜓·低年级(2021年2期)2021-07-20
中国惯性技术学报(2020年2期)2020-07-24
小学科学(2020年6期)2020-06-22
辽河(2019年7期)2019-09-03
雷达学报(2018年5期)2018-12-05
电机与控制学报(2018年9期)2018-05-14
天津诗人(2017年2期)2017-11-29
