
基于电流快速响应的永磁同步电机六拍运行控制策略
2016-09-06 07:27:45康劲松崔宇航
电工技术学报 2016年1期
康劲松 崔宇航 王 硕
(同济大学电子与信息工程学院 上海 201804)
基于电流快速响应的永磁同步电机六拍运行控制策略
康劲松崔宇航王硕
(同济大学电子与信息工程学院上海201804)
提出一种基于电流快速响应的永磁同步电机六拍运行控制策略,使电机在满足动态过调制、弱磁和电流快速响应的同时,实现电机的六拍运行。在此基础上,提出一种针对过调制控制的弱磁方法,该方法可有效减小电机在过调制区域的转矩脉动。以一台车用凸极永磁同步电机进行仿真实验研究,实验结果证明了这种控制方法的有效性。
永磁同步电机弱磁控制电流控制过调制六拍运行
0 引言
永磁同步电机反电动势的大小与转子的速度呈正比,为了避免电流调节器进入饱和状态,需保持逆变器的输出电压随速度增加而增加。然而,逆变器的输出电压受到直流侧电压的限制,为了克服直流母线电压的约束,通常采取减小d轴电流的方法进行弱磁控制以拓展电机的运行区域[1-3]。在早期关于永磁同步电机弱磁控制方法的研究中,仅将线性调制区看作是可以稳定运行的区域。虽然这些弱磁方法能实现电机的稳定运行,但并不能实现母线电压的最大利用。
六拍运行具有提高母线电压利用率和拓展弱磁区域的优点,但电机工作在六拍运行状态时,受到参考电压差值小和电流调节器饱和等因素影响,会出现电流响应变慢的问题。目前,国内外对六拍运行的研究,主要还停留在稳态运行上。文献[5-7]主要从实现六拍稳态运行出发,研究如何实现线性区和非线性区的平稳切换,并未解决电流响应速度慢的问题。文献[8-10]采用电压角控制的方法,消除了电流调节器饱和带来的影响,实现了电流响应的提高。但此类方法采用开环控制的方式,会导致电机的稳态性能变差。文献[11,12]改进了弱磁方法,分别采用d轴电流误差信号和通过低通滤波器的电压差信号作为去磁电流增量的方法,减小电流调节器饱和带来的影响,使电流动态响应速度得到提高。但这种方法的适用范围并未考虑六拍运行状态。文献[13]采用电压矢量优化的方法,改进了传统六拍运行控制的动态性能,电流的响应速度得以提升。这种优化方法采用传统的弱磁方法,过调制区性能较差,会产生较大的电流谐波和转矩脉动。针对过调制区传统弱磁方法性能较差的问题,文献[14,15]改进了弱磁方法,分别在弱磁方法中加入了电压闭环和低通滤波器,从而减小了转矩脉动和电流谐波。文献[16]在传统弱磁方法的基础上加入谐振控制器,抑制了电流谐波,改善了弱磁性能[16]。但这些方法并未解决电流响应速度变慢的问题。
为了解决永磁同步电机在六拍运行状态时电流响应速度变慢的问题,本文在文献[13]的基础上提出一种基于电流快速响应的六拍运行控制策略,实现了电流的快速响应。同时,还提出了一种用于过调制控制的弱磁方法,与传统弱磁方法相比,该方法能够减小电流谐波和转矩脉动。仿真和实验结果证明了所提方法的有效性。
1 动态过调制方法及六拍运行
三相桥式电压型逆变器共有8种开关状态,根据3个桥臂开关的不同组合,逆变器共输出8个基本电压矢量,包括6个非零矢量和2个零矢量,其组成的电压极限区域为一个电压正六边形,其区域的大小与直流母线电压Udc的幅值呈正比,如图1a所示。根据实际电压矢量是否能线性的合成为参考电压矢量,电压平面区域可分为线性区域和非线性区域,如图1b所示。在线性区域内,电压合成矢量可精确地合成为参考电压矢量U。但是,当电压矢量进入非线性区域,不能再通过线性区的方法来合成电压矢量,此时通常会采用动态过调制算法,将超出电压六边形的电压值限制在电压正六边形的边界上,并将此电压值作为逆变器输出电压。

图1 基本电压矢量及合成电压矢量分区Fig.1 Basic voltage vector anddicision for voltage synthesis
目前,根据获得过调制及六拍运行的起止点的方法不同,动态过调制及六拍运行的方法可分为两种:根据零电压矢量的作用时间来判断和比较参考电压矢量(调制比)值来判断。由于第一种方法不能通过优化电压矢量的方法来获得动态性能的提升,所以本文采用第二种方法,以比较参考电压矢量值来获得起止点的动态过调制方法。根据参考电压矢量幅值U的大小,本文将电机运行区域划分为4个调制区间分别进行控制。
3)过调制二区:当时,将U在正六边形上进行投影修正,形成新的参考电压矢量U*,即用U*替代U,再根据U*计算开关电压矢量作用时间。修正后的电压矢量的相位和幅值分别为




图2 过调制方法示意图Fig.2 Schematic for over-modulation methods
2 电压利用率与电流动态响应的关系
在永磁同步电机运行过程中,逆变器经过PWM调制后提供给电机的基波电压Us1及定子电流id和iq都要受到极限电压Uslim和极限电流Ilim的限制,可表示为
Ilim由永磁同步电机驱动控制系统决定,而选取合适的Uslim需要综合其他因素,因为Uslim同时影响母线电压利用率和电流动态响应的速度。由式(5)可知,定子电压的基波分量Us1受到Uslim的限制,而母线电压利用率为定子电压的基波分量与直流侧电压的比值,所以Uslim直接影响直流侧母线电压的利用率。逆变器输出电压的基波分量Us1的极限值可用极限圆表示,如图3所示。其中C1表示线性区域输出电压基波分量所能达到的最大极限圆,C2表示六拍运行所能达到的逆变器最大输出电压基波分量的极限圆。

图3 逆变器输出电压基波分量极限圆Fig.3 Circle constraint of fundamental voltageof inverter output
在对永磁同步电机的研究和应用中,通常只有线性区域被认为是稳态运行区域,很少有学者关注母线电压利用率的大小。在这种情况下,Uslim被设定为0.52Udc,并留有一定的余量。稳态运行时,Us1会被限制在C1范围内,只有动态调节过程会进入C1到C2的区间。例如,当电机在弱磁区稳定运行时,突然快速增加转矩给定值,电压目标值也会跟着突然增加,电机会进入动态运行区域。此时,进行电流控制时的参考电压差值,包含C1和C2极限圆之间的电压差值,所以在调节过程中,电流动态响应良好。
3 六拍运行优化控制策略
本文提出的永磁同步电机六拍运行控制策略在最大转矩电流比(MTPA)及弱磁算法的基础上,采用电流闭环控制,加入电压矢量优化环节,以实现电流的快速响应,具体控制策略框图如图4所示。本方案包括动态过调制算法模块、MTPA及弱磁算法模块和参考电压优化算法模块3个主要控制模块。动态过调制算法模块采用比较参考电压矢量获得过调制起止点的方法,在六拍运行期间,参考电压矢量一直保持在电压正六边形区域外旋转,过调制算法模块会不断的产生六拍运行的电压。MTPA及弱磁控制模块通过弱磁算法来限制参考电压的幅值,并决定去磁电流增量的大小。参考电压矢量优化算法模块通过优化电压参考矢量来提升电流的快速响应。下面对3个控制模块分别进行详细描述。
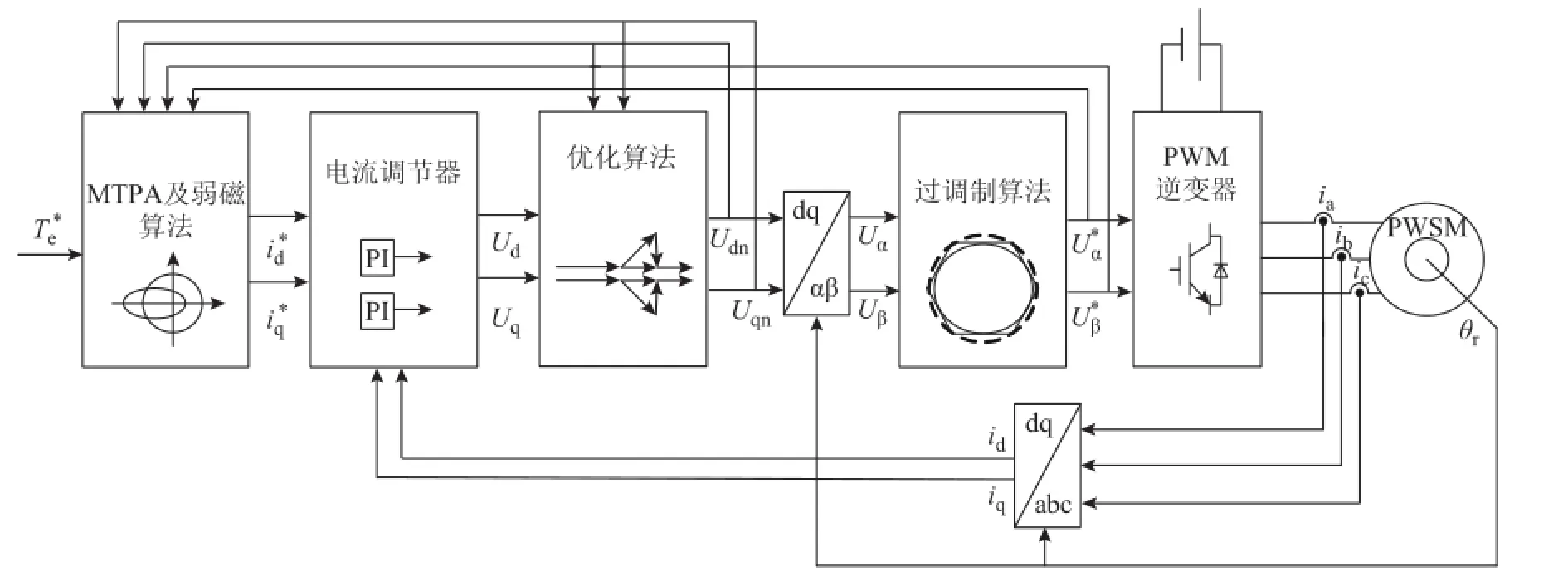
图4 基于电流快速响应的永磁同步电机六拍运行控制策略框图Fig.4 Block diagram of rapid response control of current for six-step operation of PMSM
3.1动态过调制

3.2改进弱磁算法
弱磁算法的作用是确保当前的电流参考值满足电压和电流极限圆的要求。文献[13]提出了一种基于电压极限Ulim和参考电压U之间的差值作为PI调节器输入量的弱磁方法,如图5a所示。通过设定Ulim获得调制区域的扩大,在传统弱磁控制时,Ulim一般略小于为了到达六拍运行状态,需要设定 Ulim为 2Udc/3,这样当Us超过2Udc/3时,弱磁算法开始作用以限制U小于Ulim。这种方法与文献[14,15]使用低通滤波器方法相比,优点在于其可将U限定在一个恒值。但此方法有一个本质的缺陷,因为此方法实际上是将电压矢量限制在以Ulim为半径的电压圆上,而在实际过调制区域,电压矢量应被限制在电压正六边形边界上。因此,文献[13]采用的弱磁方法会导致很大的电流谐波和转矩脉动,也会在一定程度上导致电流响应速度变慢。同时,当电流进入深度弱磁区域时,由于继续削弱d轴电流会导致q轴电流剧烈振荡,同样会导致定子电流谐波增加和转矩脉动增大。
本文在文献[13]提出的弱磁方法的基础上提出一种将电压矢量限制在电压正六边形边界上的弱磁方法,如图5b所示。图中,控制去磁增量的量电压差值可表示为


图5 不同弱磁方法框图Fig.5 Block diagram of different flux weakening methods
当输出电压目标的合成矢量超出电压正六边形时,即ΔU>0时,弱磁模块开始作用,通过PI调节器的输出去磁电流增量,实现将输出的目标电压限制在电压正六边形内。
此外,与文献[13]提出的弱磁方法相比,本文提出的弱磁算法还有一个改进之处。传统的弱磁方法是采用始终削弱d轴电流的方法,这种方法在深度弱磁区会出现电流振荡的问题,因为在深度弱磁区时,id的微小扰动就会导致iq的剧烈波动。本文的改进之处是先使d轴电流沿负轴方向增加,通过参考电流发生器来给定q轴电流。之后,再根据转速ωr判断电机是否进入深度弱磁区域。当电机进入深度弱磁区,通过选择算法,将原本削弱d轴电流的弱磁算法切换到削弱q轴电流的弱磁算法。通过此改进的弱磁方法,可使深度弱磁区的电流波动明显下降,进而也减小转矩脉动。通过弱磁改进算法,电机在弱磁区工作在六拍运行状态时,电流波动和转矩脉动均有显著下降。
3.3电压参考矢量优化方法
参考电压优化算法模块的作用是当电机工作在六拍运行状态时,提高电流的动态响应速度。根据第三节的内容可知,在六拍运行期间,用于弱磁控制时的参考电压差值较小,所以电流快速响应控制的实现非常困难。
在理想的情况下,永磁同步电机的数学模型可表示为[17,18]
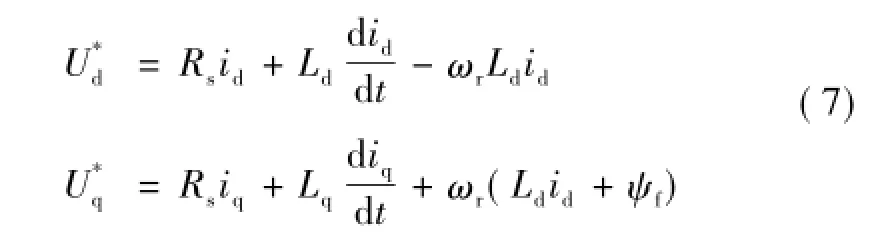
式中,id、iq分别为定子电流的交直轴分量;Ud、Uq分别为定子电压的交直轴分量;Ld、Lq分别为定子电感;Rs为定子电阻;ωr为电角速度;ψf为永磁体磁链。
对于电流快速响应的控制而言,可忽略电机定子阻抗电压,则数学模型可近似为
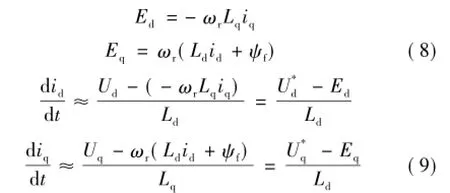
式中,Ed、Eq分别为电机在旋转过程中产生的反电动势。从式(9)可看出,id的变化率与Ud和Ed的差值有关,而iq的变化率与Uq和Eq的差值有关,为了增强id的响应速度,需要增加Ud或减小Ed,而为了增强iq的响应速度,就需要增加Uq或减小Eq。由于Ed和Eq的值会受到id和iq的值的影响,不易优化,因而,本文采用优化Ud和Uq两个参考电压矢量的方法,来获得电流响应速度的提升。
本文采用的电压参考矢量优化模块框图,如图6所示。优化模块根据信号Uk的值来控制开关的闭合,进而控制优化模块的介入时刻,当优化算法介入时,电流调节器输出的参考电压Ud和Uq被优化为Udn和Uqn,优化方法为



图6 电压矢量优化模块框图Fig.6 Block diagram of voltage reference’s modification
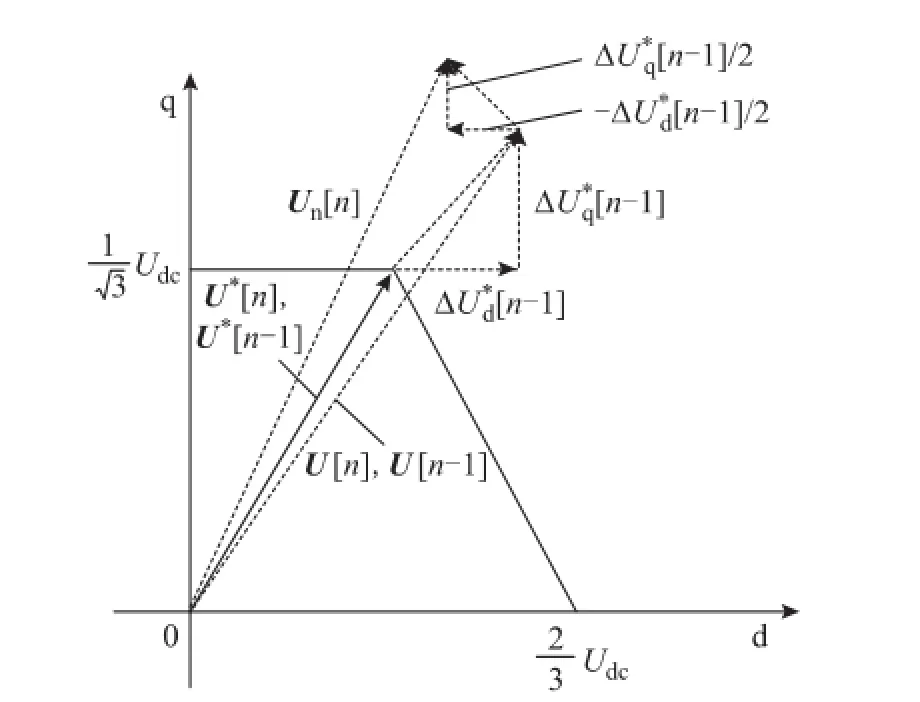
图7 参考电压矢量优化方法Fig.7 Modification method of voltage reference
从图5b中可看出,电流调节器通过产生参考电压值Ud和Uq来减小实际电流与参考电流之间的差值。参考电流和实际电流之间的差值Δid和Δiq经过电流调节器输出的电压值为
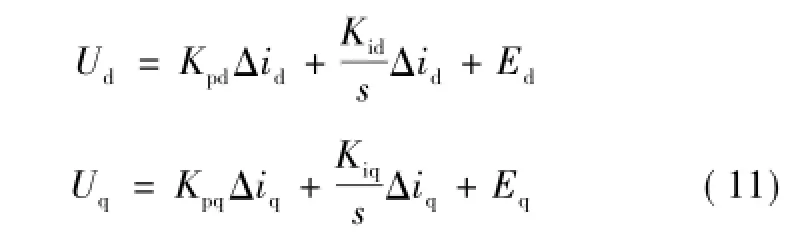
在参考电压值Ud和Uq中,由于积分项占比较小,所以式(11)可被近似为式(12)。

将式(12)代入式(9)可得到优化前用于电流控制时的参考电压差值为

经过电压矢量优化模块,即将式(10)代入式(13),并分别用[n]和[n-1]表示本周期和前一周期的量,可得到优化后的参考电压差值为
对比式(13)和式(14),优化后的参考电压差值相比于优化前,在d轴和q轴分别提升了-ΔUd[n]/2和ΔUq[n]/2,这样用于电流控制时的电压参考矢量差值有了显著提高,电流的响应速度也会有较大提升。由于电压参考矢量优化模块只工作在六拍运行状态,因而不会影响电机在线性区的稳态运行。
4 仿真与实验
以一台64 kW的车用凸极永磁同步电机为控制对象,采用第2节所提出的过调制控制策略,在Matlab/ Simulink环境下建立了永磁同步电机过调制控制系统的仿真模型,并在控制系统中加入改进后的弱磁算法和电压参考矢量优化算法,对电机的运行性能和电流响应速度进行仿真和实验分析,实验和电机参数见表1。
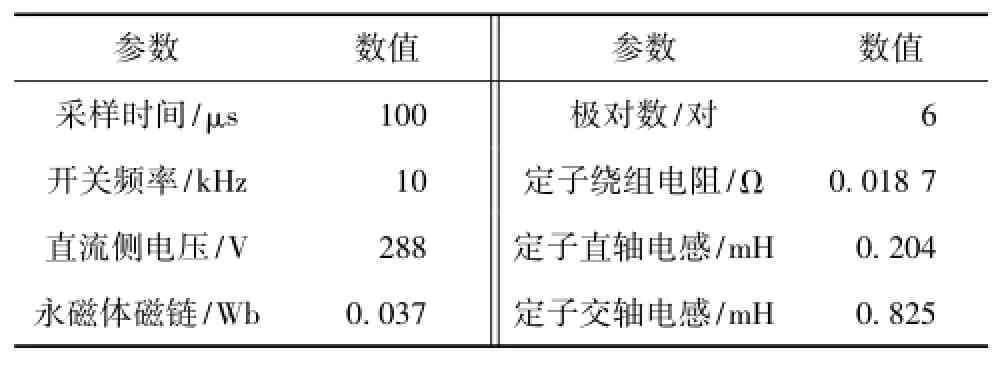
表1 实验和电机参数Tab.1 Experimental settings and parameters of the tested motor
4.1实验1:弱磁优化模块性能
本实验的目的是将本文所提出的弱磁方法与传统以文献[13]所提出的弱磁方法进行对比,来测试本文所提出的弱磁方法的性能。
在永磁同步电机过调制控制系统中,分别采用传统的弱磁方法和本文提出的弱磁方法,在t为0 s时,设定给定转矩为150 N·m,控制电机从0 r·min-1加速到8 000 r·min-1,得到两种方法的电机机械特性曲线,分别如图8a和图8b所示。采用文献[13]的弱磁方法时,电机在低速恒转矩区时,转矩脉动较小,和采用本文提出的弱磁方法基本相同。当电机运行到中高速弱磁区时,转矩脉动明显增大,到深度弱磁区时,转矩脉动非常大,已不适用于牵引驱动和电动汽车等领域的应用。而采用本文提出的弱磁方法时,转矩脉动明显减小,尤其是在中高速弱磁区时,电机的转矩性能显著改善,脉动幅值和低速恒转矩区基本相当。

图8 不同弱磁方法的下机械特性曲线Fig.8 Mechanical characteristic by different flux-weakening methods
4.2实验2:电压矢量优化模块性能
本实验的目的是测试本文所提出的电压矢量优化模块的性能。在加入了改进弱磁方法模块的永磁同步电机过调制控制系统中,分别采用未加入和加入电压矢量优化模块两种方法,将电机转速控制在4 000 r·min-1,在t为0.05 s时,设定给定转矩从0 N·m到最大转矩阶跃变化,得到电机在两种情况下进行六拍运行时的电压运行轨迹图和电流、电压波形图,分别如图9~图11所示。
图9分别是在静止两相坐标系下,得到的未加入和加入电压矢量优化模块时的六拍运行电压运行轨迹图。从图9a中可看出,在使用第二节的过调制方法时,当参考电压矢量满足六拍运行条件时,电机可稳定工作在六拍运行状态。从图9b中可看出,通过电压矢量优化模块,电压参考矢量被优化后的电压矢量所取代,且新的参考电压矢量仍可使电机稳定工作在六拍运行状态,且模值有一定的提升。

图9 电压轨迹曲线Fig.9 Voltage trajectory
图10分别为未加入电压矢量优化模块下,d轴、q轴电流波形图和相电压、线电压波形图。从图10c和图10d中可看出,电机经过线性区、过调制一区和过调制二区,进入六拍运行状态,最后到达稳定运行状态。由图10a和图10b可知,d轴和q轴电流经过六拍运行区域,最后达到稳定值。由图10可知,d轴和q轴电流调节时间约为7.5 ms,六拍运行时间约持续了3 ms。
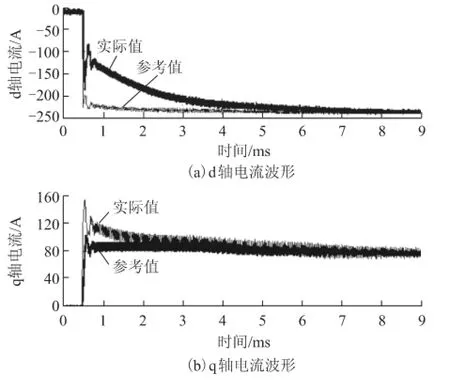

图10 在转速为4 000 r·min-1,转矩从0突变到最大值,未加入电压矢量优化模块时的实验结果Fig.10 Results in conditions as follows:Speed of 4 000 r·min-1,changing from 0 to the maximum torque,without voltage reference modification
图11分别为在相同条件下,加入电压矢量优化模块下的d轴、q轴电流波形图和相电压、线电压波形图。从图11c和图11d中可看出,电机可快速的进入六拍运行状态,最后到达稳定运行状态。从图11可知,d轴和q轴电流的调节时间约为4.5 ms,六拍运行的持续时间约为1.7 ms,即在加入电压矢量优化模块后,d轴和q轴电流的调节时间缩短了约3 ms,即约缩短了40%,六拍运行的持续时间约缩短了1.3 ms,即约缩短了43%。因此,电压矢量优化方法可显著提升电流的响应速度。


图11 在转速为4 000 r·min-1,转矩从0突变到最大值,加入电压矢量优化模块时的实验结果Fig.11 Results in conditions as follows:Speed of 4 000 r·min-1,changing from 0 to the maximum torque,with voltage reference modification
4.3实验3:六拍运行控制策略性能
本实验的目的是为了测试本文提出的六拍运行控制策略的性能。在t为0 s时,设定给定转矩为150 N·m,让电机从0 r·min-1开始加速到9 500 r·min-1,分别采用本文提出的六拍运行控制策略和传统的SVPWM控制策略,得到这两种控制策略下的转矩与转速平均变化曲线和功率与转速平均变化曲线,分别如图12所示。
从中图12a可看出,电机采用六拍运行控制策略,在3倍转折速度(约为9 500 r·min-1)时,转矩提升了约11%,电机的恒转矩区域约拓展了14%。从图12b可看出,采用六拍运行控制策略时,电机在3倍转折速度时,输出功率约提升了8.5%。这是因为电机采用传统的SVPWM控制策略时,电机的运行区域仅为线性区域内,而采用六拍运行控制策略时,电机的运行区域拓展为正六边形电压区域,直流母线电压的利用率得到提高,进而使得电机的转折速度和相同转速下的输出转矩增加。

图12 六拍运行控制策略特性曲线Fig.12 Characteristic curve by six operation control strategy
5 结论
本文提出一种基于电流快速响应的永磁同步电机六拍运行控制策略。采用提出的控制策略,永磁同步电机控制系统可在不改变硬件的条件下,同时实现运行区域的拓展和电流的快速响应。在给定转矩变化时,d轴和q轴电流可快速跟随变化,从而使电机输出转矩快速达到给定值。此外,提出了一种新的过调制弱磁方法,这种方法可减小电机在过调制区运行时的电流波动和转矩脉动。实验表明,在转速为4 000 r·min-1时,设定给定转矩从0 N·m突变为最大值,电流响应时间缩短了40%;电机在3倍基速时,恒转矩区拓展了14%,转矩能力增强了11%。仿真实验结果证明了本文所提出控制策略的可行性和有效性。
[1]何亚屏,文宇良,许峻峰,等.基于多模式SVPWM算法的永磁同步牵引电机弱磁控制策略[J].电工技术学报,2012,27(3):92-99. He Yaping,Wen Yuliang,Xu Junfeng,et al.Highpower permanent magnet fiux-weakening strategy based onmulti-modeSVPWM[J].TransactionsofChina Electrotechnical Society,2012,27(3):92-99.
[2]方晓春,胡太元,林飞,等.基于交直轴电流耦合的单电流调节器永磁同步电机弱磁控制[J].电工技术学报,2015,30(2):140-147. Fang Xiaochun,Hu Taiyuan,Lin Fei,et al.Single current regulator flux-weakening control of PMSM based on current cross-coupling effect[J].Transactions of China Electrotechnical Society,2015,30(2):140-147.
[3]程启明,程尹曼,王映斐,等.交流电机控制策略的发展综述[J].电力系统保护与控制,2011,39(9):145-154. Cheng Qiming,Cheng Yinman,Wang Yingfei,et al. Overview of control strategies for AC motor[J].Power System Protection and Control,2011,39(9):145-154.
[4]Holtz J,Lotzkat W,Khambadkone A M.On continuous control of PWM inverters in the overmodulation range including the six-step mode[J].IEEE Transactions on Power Electronics,1993,8(4):546-553.
[5]Nguyen T H,Van T L,Lee D C,et al.Control mode switching of induction machine drives between vector control and V/f control in overmodulation range[J]. Journal of Power Electronics,2011,11(6):846-855.
[6]Chiang GT,ItohJI.Comparisonoftwoovermodulation strategies in an indirect matrix converter[J]. IEEE Transactions on Industrial Electronics,2013,60(1):43-53.
[7]李生民,鲁静,钟彦儒.一个基于极限轨迹法的新型矩阵变换器过调制策略[J].电工技术学报,2012,27(6):110-125. Li Shengmin,Lu Jing,Zhong Yanru.An overmodulation inmatrixconverterbasedonlimittrajectory[J]. Transactions of China Electrotechnical Society,2012,27(6):110-125.
[8]Monajemy R,Krishnan R.Performance comparison for six-step voltage and constant back EMF control strategies forPMSM[C]//ConferenceRecordofthe1999 IEEEIndustry Applications Conference,Phoenix,AZ,1999,1:165-172.
[9]Nakai H,Ohtani H,Satoh E,et al.Development and testing of the torque control for the permanent-magnet synchronous motor[J].IEEE Transactions on Industrial Electronics,2005,52(3):800-806.
[10]Schoenen T,Krings A,van Treek D,et al.Maximum DC-link voltage utilization for optimal operation of IPMSM[C]//2009 IEEE International Electric Machines and DrivesConference,Miami,Florida,USA,2009: 1547-1550.
[11] 周华伟,陈龙,刘国海,等.一种改善PMSM动态性能的弱磁策略[J].电机与控制学报,2014,18(9):23-29. Zhou Huawei,Chen Long,Liu Guohai,et al.FluxweakeningstrategyforimprovingPMSMdynamic performance[J].Electric Machines&Control,2014,18(9):23-29.
[12]Kwon T S,Sul S K.Novel antiwindup of a current regulator of a surface-mounted permanent-magnet motor for flux-weakening control[J].IEEE Transactions on Industry Applications,2006,42(5):1293-1300.
[13]Kwon Y C,Kim S,Sul S K.Six-step operation of PMSM with instantaneous current control[J].IEEE Transactions on Industry Applications,2014,50(4): 2614-2625.
[14] 吴芳,万山明,黄声华.一种过调制算法及其在永磁同步电动机弱磁控制中的应用[J].电工技术学报,2010,25(1):58-63. WuFang,WanShanming,HuangShenghua.Anovermodulation algorithm and its application in PMSM drive with flux-weakening control[J].Transactions of China Electrotechnical Society,2010,25(1):58-63.
[15]张兴春,张幽彤,黄文卿.车用内置式永磁同步电机过调制弱磁算法[J].北京理工大学学报,2013,33(9):925-928,933. Zhang Xingchun,Zhang Youtong,Huang Wenqing. Research on over-modulation flux-weakening strategy of IPMSM in HEV application[J].Transactions of Beijing Institute of Technology,2013,33(9):925-928,933.
[16]王贺超,夏长亮,阎彦,等.基于谐振控制的表贴式永磁同步电机弱磁区电流谐波抑制[J].电工技术学报,2014,29(9):83-91. Wang Hechao,XiaChangliang,YanYan,etal. Current harmonicsuppressionintheflux-weakening control of surface permanent magnet synchronous motors using resonant controllers[J].Transactions of China Electrotechnical Society,2014,29(9):83-91.
[17]朱喜华,李颖晖,张敬.基于一种新型滑模观测器的永磁同步电机无传感器控制[J].电力系统保护与控制,2010,38(13):6-10. Zhu Xihua,Li Yinghui,Zhang Jing.Senorless control of PMSM based on a novel sliding mode observer[J]. Power System Protection and Control,2010,38(13): 6-10.
[18] 安小宇,崔光照,丁国强,等.基于中心差分滤波算法的PMSM无传感器控制方法[J].电力系统保护与控制,2013,41(23):37-42. An Xiaoyu,Cui Guangzhao,Ding Guoqiang,et al. The PMSM’s sensorless vector control method based on CDKFalgorithm[J].PowerSystemProtectionand Control,2013,41(23):37-42.
The Current Rapid Response Control Strategy for the Six-step Operation of Permanent Magnet Synchronous Motors
Kang JinsongCui YuhangWang Shuo
(College of Electronics and Information EngineeringTongji UniversityShanghai201804China)
This paper proposes a rapidcurrent response control strategyfor the six-step operation of permanent magnet synchronous motors(PMSM).This control strategy realizes dynamic over-modulation,flux weakening,and rapid current response without losing six-step steady operation.A flux weakening method for over-modulation which can effectively reduce the torque ripple in the over-modulation region is also proposed. Simulation results with a 64 kW prototype verify the effectiveness of this control strategy.
Permanent magnet synchronous motors(PMSM),flux weakening,current control,overmodulation,six-step operation
TM301.2
中央高校基本科研业务费专项资金资助项目(1700219141)。
2015-03-13改稿日期 2015-11-10
康劲松男,1972年生,教授,博士生导师,研究方向为电动汽车永磁同步电机驱动控制系统。
E-mail:kjs@tongji.edu.cn(通信作者)
崔宇航男,1991年生,硕士研究生,研究方向为车载永磁同步电机控制技术。
E-mail:yuhangcui@126.com
猜你喜欢
中学生数理化·高一版(2021年11期)2021-09-05 12:21:24
上海大中型电机(2021年2期)2021-07-21 03:01:32
防爆电机(2020年6期)2020-12-14 07:16:54
光学精密工程(2016年3期)2016-11-07 09:03:49
现代防御技术(2016年1期)2016-06-01 12:13:28
新高考·高一物理(2016年1期)2016-03-05 22:47:39
大电机技术(2015年5期)2015-02-27 08:22:28
组合机床与自动化加工技术(2014年12期)2014-03-01 02:22:54
汽车电器(2014年8期)2014-02-28 12:14:29
出版与印刷(2013年3期)2013-01-31 03:26:11
