
基于SVD变换的立体图像零水印算法
2016-09-06 09:48赵文龙于水源
中国传媒大学学报(自然科学版) 2016年1期
赵文龙,于水源
(中国传媒大学 计算机学院,北京 100024)
基于SVD变换的立体图像零水印算法
赵文龙,于水源
(中国传媒大学 计算机学院,北京 100024)
深度信息是立体图像最重要的特征,而常见的鲁棒性数字水印算法可能使立体图像深度信息遭到破坏而使其视觉效果下降。针对这个问题,提出了一种基于SVD变换的零水印算法。首先,对立体图像的左右视点图像块分别进行SVD变换,得到第一奇异值对应的左奇异向量;其次,分别计算出左右视点图像块的左奇异向量的方差;最后,利用第一奇异值对应的左奇异变量具有很好的稳定性这一特性,通过比较二者大小关系构造出零水印。同时,引入了时间戳机制,减弱了解释攻击带来的影响。仿真实验结果证明,此算法能够避免零水印的虚警概率,同时能够抵抗JPEG压缩攻击和高斯攻击,具有很好的均衡性、相似性和鲁棒性。
SVD;第一奇异值;第一奇异向量;零水印;立体图像
1 引言
立体视频由于能够给人们带来身临其境的全新视觉体验,而备受人们欢迎,被认为是下一代视频系统的主要发展方向[1-2]。同时,立体视频的内容和版权保护问题也被提上了日程。数字水印技术是近年来发展起来的一种用于数字产品版权保护以及内容真实性与完整性认证的新型技术。但是,现有的鲁棒性数字水印都是通过修改载体数据来完成水印的嵌入,这或多或少地会对载体数据造成破坏,同时,在嵌入水印前大都需要经过颜色模式转换、空域转换到频域的过程,这也会造成载体数据的改变。零水印技术是一种新出现的鲁棒性数字水印技术,它没有在载体数据中嵌入数据,而是通过提取载体数据的稳定特征来构造零水印相关信息,并与版权所有方提供的版权水印绑定,生成零水印,最后注册在独立的版权保护数据库中,实现对载体数据的保护。
视频是由连续播放的图像组合而成的,图像是视频的主要表现形式之一。所以,对视频问题的研究可以转化到对图像问题的研究。立体图像[3]组成方式有两种:彩色图像组成的立体图像、彩色图像和深度图像组成的立体图像。第一种组成方式可以提供很高的图像质量,适合高分辨率的显示器观看。针对第二种方式,需要借助软件绘制另一幅彩色图像,从而得到第一种方式的立体图像。但是绘制出的图像质量不太高。本文主要是针对第一种方式提出水印算法。
立体图像包含有深度线索,常见的鲁棒性数字水印有可能会破坏其深度线索,进而造成立体感不明显或者被彻底破坏。零水印技术正好可以避免对载体数据的破坏,通过提取立体图像的稳定特征来构造零水印。本文就是结合立体图像稳定特征提出的零水印算法。
2 零水印方案
2.1零水印概念
零水印是一种新兴的数字水印技术[4],它不改变原始图像信息,通过提取原始图像重要特征来构造水印,然后将得到的水印信息注册到版权认证数据库。零水印摒弃了原始水印技术中嵌入水印的失真处理,很好的解决了水印不可见性和鲁棒性之间的矛盾。
图像特征是构造零水印的必要条件,要求其必须有以下特性:
(1)鲁棒性:当图像经过常规的适当攻击处理后,图像特征不应有太大变化;
(2)哈希性:相似的图像特征相似度高,反之则相似度低,即图像特征相似度和图像相似度有正相关的关系。
零水印基本框架:

图1 零水印嵌入框架

图2 零水印提取框架
2.2SVD分解
奇异值分解(SVD)是最强有力的矩阵分析技术之一,现已经成为信号处理的有力工具。SVD的定义如下:
设A是秩为r的m*n矩阵,则存在m*n正交矩阵U,n*n正交矩阵V和m*n对角矩阵S,使得
A=USVT(1.1)
其中,S对角线上的元素Sjj为非负值,且S11≥S22≥... ≥Srr>0,Sjj=0,(j>r)
S对角线上的元素为矩阵A的奇异值。在矩阵A的奇异值分解中,正交矩阵U,正交矩阵V和对角矩阵S都有明确的意义。其中,U的列向量是矩阵AAT的特征向量,SST中对角线上的元素为AAT的特征值。V的列向量是矩阵ATA的特征向量,STS中对角线上的元素为ATA的特征值。
从图像处理的角度来看,奇异值分解有如下可用的特性:
(1)图像的奇异值具有较好的稳定性,在图像收到轻微扰动时,它的奇异值不会发生剧烈改变;
(2)图像块的第一奇异值通常比其他奇异值大很多,具有稳定性,而且第一奇异值对应的左奇异向量和右奇异向量也具有很好的稳定性;
(3)奇异值能够表现出图像内在的代数特性而非视觉特性;
(4)对矩阵的转置具有不变形;
2.3零水印算法
对图像进行SVD分解后,最大奇异值和对应的第一奇异向量U1、V1共同决定了图像的主要结构信息,在攻击时,所有奇异向量仅有U1和V1具有稳定性[5]。零水印算法的核心内容是利用图像的某个相对稳定的特征量来构造零水印特征矩阵,由此,本文提出一种在SVD域中基于奇异向量稳定性的零水印算法。[6-15]
2.3.1零水印嵌入算法
1.读取二值水印图像,假设宽高为m*m,对其进行置乱L次,得到水印图像w;
2.分别将立体图像的左右视点图像从RGB转换到YUV,亮度信号Y分别记为Yleft,Yright;
3.将左右视点图像的亮度信号Yleft和Yright分别分成不重叠的8*8分块;
4.对分块进行SVD分解,得到Yleft=UlSlVlT,Yright=UrSrVrT;
5.对左右视点图像块分别提取得到第一奇异值对应的左奇异向量(U的第一列),并记为Ul1,Ur1;
6.分别计算第三步中得到的列向量Ul1,Ur1的方差,并记为LVariance,RVariance,比较两者大小,如果LVariance>=RVariance,标记symbol(i)=1;否则,标记symbol(i)=0;
7.判断左右图像第i个图像块对左奇异向量的方差大小关系symbol(i)与二值水印图像第i个像素点值wi是否相等,如果二值同为“1”,或者同为“0”,则记录sign(i)=0,然后跳转到步骤9;否则,跳转到步骤8;
8.记录sign(i)=1,并跳转到步骤9;
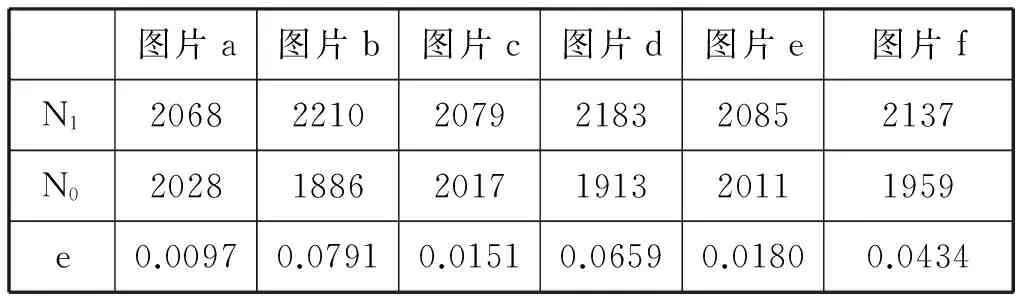
9.若i 2.3.2零水印提取算法 1.读取注册水印密钥sign; 2.分别将待测立体图像的左右视点图像从RGB转换到YUV,亮度信号Y分别记为Yleft,Yright; 3.将左右视点图像的亮度信号Yleft和Yright分别分成不重叠的8*8分块; 4.对分块进行SVD分解,得到Yleft=UlSlVlT,Yright=UrSrVrT; 5.对左右视点图像块分别提取得到第一奇异值对应的左奇异向量(U的第一列),并记为Ul1,Ur1; 6.分别计算第三步中得到的列向量Ul1,Ur1的方差,并记为LVariance,RVariance,比较两者大小,如果LVariance>=RVariance,标记symbol(i)=1;否则,标记symbol(i)=0; 7.判断左右图像第i个图像块对的左奇异向量方差的大小关系symbol(i)与密钥值sign(i)是否相等,如果二值同为“1”,或者同为“0”,则记录watermark(i)=0,然后跳转到步骤9;否则,跳转到步骤8; 8.记录watermark(i)=1,并跳转到步骤9; 9.若i 图3 嵌水印流程图 2.4时间戳机制 零水印存在下面这样一个问题:如果有人在你所保护的媒体数据中又构造了另外的水印,并且声明版权属于他的,即所谓的解释攻击问题。对于这样一个问题,仅靠目前的水印技术并不能解决媒体所有权问题,因为许多水印方案并没有提供本质的方法来检测嵌入在同一图像中的多个水印谁先谁后的问题,所以本文引入了时间戳机制。 目前,我国有一个国家授时中心(N)作为我国标准时间产生、保持和传递的中心,具有数字时间戳认证的技术条件和权威性,可作为一个时间戳权威TSA(Time-Stamp Authority)。TSA的任务是专门从可信时间源(如电子钟)获取精确时间,为向它提出时间戳申请的用户提供由它签名的时间戳。典型的基于时间戳的水印认证过程如图5所示。 当需要认证时,由客户向认证服务器发出请求,认证服务器内容部产生一个时间戳,进行消息摘要提取后一起发送给客户;客户获取时间戳,验证其完整性后,将用户密码与时间戳字节进行运算后,使用客户私钥进行数字签名,发送给认证服务器;认证服务器对用户认证信息中的消息摘要、时间戳、签名进行验证,必须同时通过,则通过一次认证,否则,认证失败;最后认证服务器通知客户身份认证成功或失败。 图4 提取水印流程图 图5 基于时间戳的水印认证过程 作者在创作的作品发表之前,通过向时间戳权威机构申请时间戳,将代表自己身份的水印、创作的作品、以及申请的时间戳三者进行绑定,以此证明某个时间开始作者对该作品的所有权。 本文选取水印图像为大小64*64的灰度图像,如图6所示,选取6幅不同的左右格式立体图像作为样例图像,宽高为1920*1080,如图7所示。 图6 水印图像 3.1均衡性测试 设计良好的零水印算法要满足均衡性,就是指构造的零水印中信号1和信号0的个数要基本相同,均衡性采用下面的公式(1)进行计算 (1) 在公式中,N1代表零水印中信号1的个数,N0代表零水印中信号0的个数,Nall代表零水印信号总数,e值越小表示零水印的均衡性越好,表1列出了不同立体图像零水印均衡性测试结果。从表中数据可以知道,不同的立体图像的零水印中,信号0和信号1的个数近似相等,也就是水印图像的均衡性近似为0,构造出的零水印满足均衡性要求。 图片a 图片b 图片c 图片d 图片e 图片f图7 立体图像左视点图像 3.2均衡性测试 不同的立体图像左右视点内容不同,所以构造出的零水印也应是不同的,为了防止虚警概率的产生,所以需要计算不同立体图像零水印的相似度[16-18],如公式(2)所示: (2) 公式中,S表示相似度,N表示水印长度,表示原始零水印的第n个信号值,表示从立体图像中得到的零水印的第n个信号值。 如果零水印w与w’的相似度接近0.5,就表示两幅图像不相关;如果相似度为1,则说明是相关立体图像。不同立体图像零水印相似特性测试结果如表2中所示。从表2中可知,相同立体图像由于完全匹配,相似度为1;而与其他立体图像,相似度接近0.5左右。 3.3鲁棒性测试 对6幅样例图像进行了JPEG压缩攻击和高斯攻击,下表列出了在攻击条件下水印的相似度,如表3所示: 图8是在水印相似度为0.7831时提取出的水印图像,也就是在攻击条件下,水印相似度最低时,提取出的水印图像依然清晰可见。 图8 相似度为0.7831时提取的水印图像 从以上数据可知,在不同程度jpeg压缩和高斯攻击条件下,提取出的零水印和原始零水印仍然具有很高的相似度,当水印相似度达到0.75以上时,我们就可以认为实现了正确检测。同时,不同特征水印的相似性保证了算法的虚警概率很低。这些说明了本文的零水印算法具有很高的鲁棒性。 表1 六张图像的零水印中信号1和信号0的 表2 不同图像构造出的水印相似度 表3 不同程度和类型的攻击下提取的 本文算法对立体图像进行SVD分解后,最大奇异值和其对应的第一奇异向量U1,V1共同决定了图像的主要结构信息,具有稳定性。基于这一事实,本文提出了一种在SVD域中基于奇异向量稳定性的零水印算法。实验结果说明,本文所构造的零水印具有唯一性,对有损压缩和高斯攻击具有一定的鲁棒性。另外,通过引入时间戳机制,在一定程度上降低了解释攻击带来的影响。 [1]Blanchfield P,Wang D. Improved Tile Format of Stereoscopic Video for 3-DTV Broadcasting[J]. IEEE Transactions on Broadcasting,2014,60(1):134-140. [2]Torre E G,Gómez-Barquero D,Schierl T. Efficient HDTV and 3DTV Services over DVB-T2 Using Multiple PLPs with Layered Media[J]. IEEE Communications Magazine,2013,51(10):76-82. [3]Niu Y,Souidene W,Beghdadi A. A Visual Sensitivity Model Based Stereo Image Watermarking Scheme[C].2011 3rd European Workshop on Visual Information Processing(EUVIP),2011:211-215. [4]温泉,孙锬锋,王树勋. 零水印的概念与应用[J]. 电子学报,2003,02:214-216.. [5]王巍. 变换域图像零水印技术研究[D].北京邮电大学,2013. [6]周武杰,郁梅,蒋刚毅,彭宗举,邵枫. 基于视觉感知和零水印的部分参考立体图像质量评价模型[J]. 电子与信息学报,2012,08:1786-1792. [7]李旭东. 块奇异值分解和量化实现的图像数字水印算法[J]. 光电子激光,2011,12:1847-1851. [8]曾晴,马苗,孙莉,周涛. 基于奇异值分解的小波域数字水印方法[J]. 陕西师范大学学报(自然科学版),2014,01:19-23. [9]焦问,丁文霞. 一种基于混沌映射和奇异值分解的数字图像水印算法[J]. 信号处理,2011,08:1219-1223. [10]潘黄琼,陈光喜,丁勇,李峰. 彩色图像DWT变换下的块SVD零水印[J]. 微电子学与计算机,2012,05:50-53. [11]Fan Mingquan,He Hongjie. Restudy on SVD-based watermarking scheme[J]. Applied Mathematics and Computation,2008,203(2):926-930. [12]李春艳,娄七明,刘靖屏. Arnold置乱在零水印中的二次复用[J]. 网络安全技术与应用,2012,12:61-63. [13]尚南南. 图像零水印算法的研究[D].杭州电子科技大学,2014. [14]曲长波,王东峰. 基于位平面理论和奇异值分解的鲁棒零水印算法[J]. 计算机应用,2014,12:3462-3465,3506. [15]刘芳红,张贵仓. 一种基于关系的数字水印算法[J]. 自动化技术与应用,2011,02:13-16. [16]何冰. 水印技术中相似度公式的一种改进算法[J]. 计算机与数字工程,2010,10:95-98. [17]李旭东. 评价数字水印相似程度的公式分析及改进[J]. 自动化学报,2008,02:208-210. [18]李黎,阮留照. 一种合理的数字水印相似度评价公式[J]. 杭州电子科技大学学报,2011,03:26-29. (责任编辑:马玉凤) Zero Watermarking Algorithm of the Stereo Image Based on SVD Transformation ZHAO Wen-long,YU Shui-yuan (Computer Science School,Communication University of China,Beijing 100024) Depth information is the most important feature of stereo images. The common digital watermarking algorithm,however could damage the depth information of the stereoscopic image,worsening its visual effect. Taking this problem into consideration,the zero watermarking algorithm based on SVD transformation is to be proposed in this paper. Firstly,the left and right viewpoint image blocks of the stereoscopic image were made the SVD transformation,leading to the first left singular vectors corresponding to the first singular value. Secondly,calculate the variances of the first left singular vectors of the left and right viewpoint image blocks respectively. Lastly,the first left singular vectors corresponding to the first singular value have an extraordinary stability,which can be used to construct the zero watermarking through the calculated size differences. At the same time,the time stamping mechanism is introduced to reduce the impact of the interpretation attack. The results of the mimic experiments reveal that the algorithm can avoid the false alarm probability of zero watermarking,and resist JPEG compression attack and gauss attack as well. As a result,the zero watermarking constructed by the algorithm is marked by balance,similarity and robustness. singular value decomposition(SVD);first singular value;first singular vector;zero watermarking;stereo images 2015-09-15 3D视频内容渲染及水印管理系统研制(2013BAH54F03) 赵文龙(1989-),男(汉族),河南商丘人,中国传媒大学计算机学院研究生.E-mail:1248351595@qq.com TP309.2 A 1673-4793(2016)01-0032-08


3 实验仿真和结果分析







4 结论
猜你喜欢
机械研究与应用(2022年2期)2022-05-21黑龙江工业学院学报(综合版)(2021年8期)2021-10-27科技研究·理论版(2021年22期)2021-04-18农业机械学报(2020年2期)2020-03-09电子制作(2019年20期)2019-12-04中华建设(2019年7期)2019-08-27电脑知识与技术(2016年28期)2016-12-21环境(2016年7期)2016-05-14新闻前哨(2015年2期)2015-03-11浙江大学学报(工学版)(2015年1期)2015-03-01
