液压同步回路专利申请分析
2016-08-31 05:26:46经验人沈金峰丁向华
中国科技信息 2016年1期
经验人:沈金峰 丁向华
液压同步回路专利申请分析
经验人:沈金峰 丁向华
液压同步回路是液压系统最重要的回路之一,本文通过检索专利数据,对国内外液压同步回路专利申请情况进行了分析,获得了在华和全球液压同步回路专利的随年代发展的申请趋势、发展历程以及技术路线,重点分析了该领域专利申请目标国和原创来源国概况,并对国内外该领域的重点申请人进行了数据统计分析和技术类型剖析,为我国该领域的申请人提供了专利布局参考。
概述
液压系统作为先进的执行控制系统已经广泛应用于各个行业中,在液压系统中同步控制系统是不可或缺的一部分,如履带式挖掘机的行走机构、起重机伸缩臂同步伸缩机构等都有同步要求,但是高精度多执行机构的同步问题一直是本领域的一个难题,尤其是在配重或重载不平衡的工况下,同步要求显得尤为重要。
液压同步回路是液压系统最重要的回路之一,其是指在各类机器、设备、装置中,实现同步运行功能,由液压元件、管路按一定规律组合,并以液流介质传递,控制驱动两个以上的执行器产生相同的线位移或角位移。
液压同步回路分为等同模式和主从模式,常见的有:机械液压同步回路、节流调速同步回路、同步阀同步回路、液压缸串联同步回路。以下就针对国内外关于液压同步回路专利申请的状况进行分析。
数据库的选择和检索
液压同步系统在IPC中的分类号为F15B11/22。根据数据库收集的文献量以及分布特点对中文和外文数据库进行选择,中文库选择CNABS(收录了自1985年至今在中国申请的全部专利文献),外文数据库选择虚拟数据库VEN(SIPOABS、DWPI 组成),考虑到液压同步系统的分类号较准确,本文以分类号为主,关键词为辅检索,检索截止日期为2015年12月8日。
液压同步系统专利申请量整体情况
中文库专利申请情况
如图1所示,在中文库检索得到的最早的液压同步系统的专利出现在1985年(CN85103699),1985-2005年间一直处于稳定上升阶段,而2006-2010年间申请量显著增加,到2011年后申请量激增。图1也恰好反映了我国在液压同步领域的发展概况,由于重工业起步较晚,早期液压同步系统的研究甚少。而2006-2010年我国正处于经济飞速增长的阶段,同时也是工业飞速发展的阶段,液压领域逐渐被重工业企业重视起来,到了2011年后,我国许多重工企业掌握的技术已经在世界范围内领先,以三一重工、徐州重型机械及中联重科为主要代表。
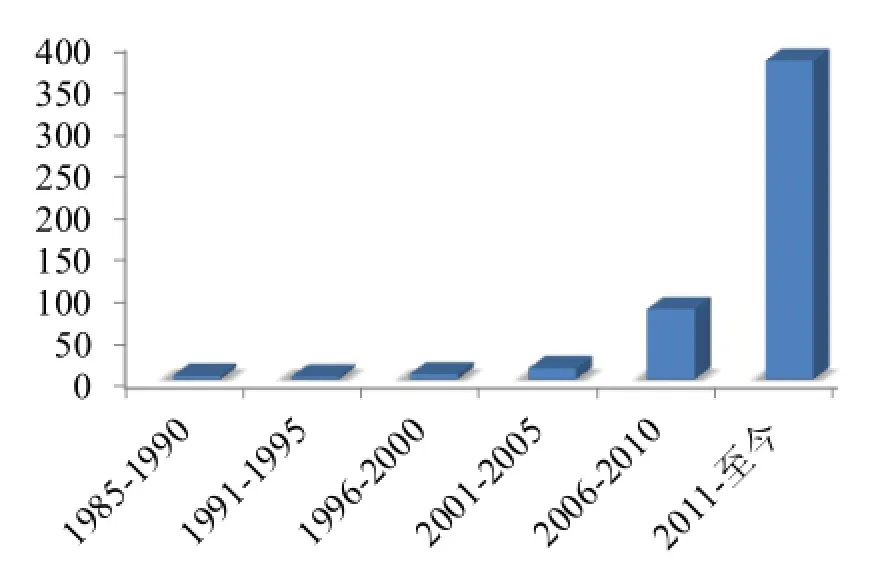
图1 液压同步回路在华专利申请趋势
外文库专利申请情况
从图2可知,国外早在1921年就已经对液压同步系统进行了研究(US19210484266)。从1960年开始,申请量增长较快,1971-1980年间的申请量达到高峰,而从1981年后,申请量逐渐下降,目前降至最低点。可见,国外对液压同步回路的研究高峰期在1971-1990这20年间,同时也是液压领域发展最快的时间段,液压动力装置逐渐取代机械动力装置。而后申请量的逐渐下降也代表了液压同步回路技术逐渐趋于成熟。相比图1显示的信息,我国目前正处于液压同步回路专利申请的高峰期,落后其他发达国家30年左右的时间,以全球专利申请的发展趋势,我国液压同步回路专利申请量同样会在5~10年后逐渐下降。
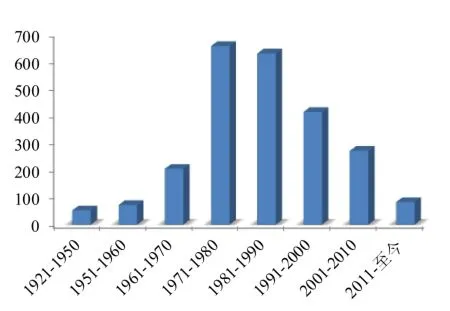
图2 液压同步回路全球专利申请趋势
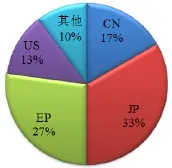
图3 目标国专利分布
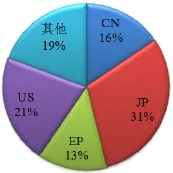
图4 原创来源国专利分布
向主要国家和地区申请量
下图为液压同步回路专利申请向主要国家和地区申请量的百分比,向中国专利局的申请量占了全球总申请量的16.7%,以目前我国液压同步回路的发展状况,这一数据还会不断增加。向日局的专利申请量达到了33.3%,这也侧面反映了日本液压领域的发展状况,其重工业发达,其中以日立建机、株式会社小松制作所、三菱重工、川崎重工等为主要代表。向美局和欧局的申请量相差不大,也几乎与中国局持平。
图4为液压同步回路专利申请主要来源国分布。来源国的分布从一定程度上代表了各个国家或地区在该领域的发展状况。由图可知,以日本为优先权的专利申请达到了31%,可见日本在液压领域的技术处于领先地位;美国次之,达到了21%,以卡特彼勒和伊顿等企业为代表,美国在液压同步领域的技术也相当领先;以中国为优先权的专利申请为16%,而欧洲仅为13%,可见,中国在液压同步领域的发展迅速,值得一提的是,三一重工已经强势进入美国市场,而其进入美国市场的主要依靠即为专利布局。
国内主要申请人及掌握的主要技术
国内液压同步系统申请人主要以徐州重型机械有限公司和三一重工为代表。
国内目前掌握的技术主要以节流调速同步和同步阀同步控制为主,以徐州重型机械有限公司为例,其于2007年申请的专利(CN200720046838X)中将双缸的同步伸缩改进为由同步控制阀控制,主要由两个电磁换向阀、梭阀和液控单向阀构成,通过压力传感器监测油缸的内腔压力反馈至电磁阀,但结构复杂且成本高;后于2011年的专利申请(CN2011104193353)提出以分流集流阀控制双缸同步,同时增设同步控制方向阀,通过分流集流阀的分流和集流功能分别实现油缸同步外伸和回缩,但分流集流阀的精度直接影响双缸的同步,其于2012年申请的专利(CN2012100034992)中提出了对传统分流集流阀的改进,根据双缸同步起或落时承受的负载大小不等而产生的不同步性,通过在分流集流阀中设置节流元件消除同步误差;但实现分流集流阀功能时由于被切断的油路进油量非常小,系统会憋压溢流导致发热,基于上述问题,申请人在后又提出了一种实现双缸同步独立控制的油路系统(CN2012100424654),在分流集流阀下游设置双缸同步独立控制阀,使单缸控制时分流集流阀的一路油路直接进入油箱,防止憋压溢流。
徐州重型机械对液压同步回路的专利申请均为双缸或多缸并联,根据徐州重型机械有限公司专利申请的特点,将其专利申请分为两类:基于分流集流阀和基于方向控制阀,如表1所示。

表1
综上,徐州重型机械有限公司对双缸同步回路的研究延续性较强,在后申请均是对其在前申请的改进,主要集中于基于分流集流阀的液压同步回路。
三一重工以双缸的串联同步技术为主,其于2010年的专利申请中(CN2010102016218)将两个活塞杆油缸首尾相连实现串联同步控制,2011年进行了改进(CN201120330272X),在双缸串联的基础上,设置连接换向供油模块,实现串联油缸的单独控制,适时补油;但串联油缸易泄漏而导致精度差,其在后来的专利申请中主要以分流机构的同步控制方式为主,如2012年的CN2012101070885和CN2012105812285、2013年的CN201320074171X,均以分流机构的形式对液压同步控制系统提出了改进;以串联油缸或分流机构的同步控制方式实时性始终不高,三一重工于2013年又提出了(CN2013102328181)以两个液压缸为基准液压缸,通过检测随动液压缸的压力反馈至控制单元,实时控制随动液压缸控制阀的开度,调节进油量实现同步。可见,三一重工早期集中于串联同步,而后集中基于分流机构的并联同步,相比徐州重型机械有限公司,其并联同步的研究较晚。
国外主要申请人及掌握的主要技术
国外申请人以日立建机(HITACHI)和卡特彼勒(CATERPILLAR)最具代表性。
以日立建机为例,早在1982年提出的专利申请(JP特願昭57-165041)就已经通过换向阀将双缸或三缸并联实现同步了,并于1984年对并联油缸同步提出了改进(JP特願昭59-52162),采用同步缸将工作缸并联,液压油分别通过同步缸的两腔进入工作缸实现同步控制;但由于作为同步缸并联形式的油缸精度较差,其在1980年提出的专利申请(JP特願昭55-9381)首次提出了利用分流集流阀通过调节阀过流截面积来控制双缸实现同步;日立建机早期有关液压同步系统回路的专利申请主要集中于等同模式的同步控制方式,精度也主要取决于分流集流阀或换向阀的精度,同步性不能完全保证,所以于1995年提出了主从模式的液压同步控制方式(JP特願平7-21908),其通过设定目标流量,检测并修正马达的负荷流量使之达到目标流量实现双马达同步;再后来的专利申请主要是对该同步控制方法的改进,如2005年的专利申请(JP特願2005-287052),检测负荷误差超出规定范围时,调整负载的高度使负荷或流量调整为设定值。
根据日立建机的专利申请的特点,将其液压同步回路专利申请作了分布比较,如表2所示。
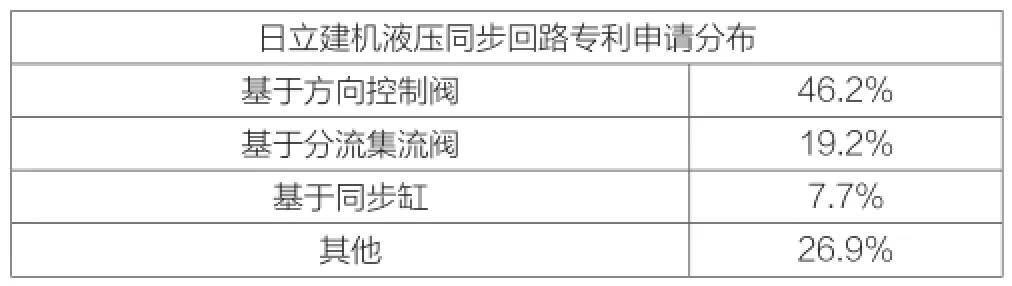
表2
日立建机的研究集中于采用方向控制阀控制的同步回路,虽然其对分流集流阀的液压同步回路研究非常早,但之后对其改进并不多。此外,其他部分还包括机械液压同步回路、安全阀溢流形式的同步回路、仅对油缸进行改进的液压同步回路以及液压同步回路控制方法等,可见,日立建机对液压同步回路的研究涉及面广而全面。
卡特彼勒有关液压同步的专利申请主要集中于双缸并联后的同步控制,早在1974年就提出了对双缸并联同步的改进(US19730394192),通过节流孔使进入双缸的流量同步,属于早期的分流集流阀,但仅有分流功能;后于1978年提出了利用并联双缸的先导控制阀实现同步的控制方式(US19770804195),先导控制阀能够根据油缸的反馈的压力调整通路,达到双缸同步;于1996年提出专利申请中(US19960593776)通过微处理器收到的反馈信号控制并联双缸前的电磁换向阀,实现精确的同步控制;于2006年的专利申请(US20060484155)中提出了利用溢流阀在设定压力时的溢流回油,使超前液压缸前的油路溢流,实现双缸同步运行。
结束语
国外对于液压同步系统回路的研究起步较早,主要采用等同模式的同步,早期集中于对油路连接结构或关系的改进,后期集中于对控制方法的改进。而国内主要集中在油路连接结构或关系的改进,以等同模式为主,而对控制方法的改进较少,这是因为主从模式的液压系统结构及油路复杂,需要反馈与被反馈装置,同时配以电气系统来实现,这与目前液压机械追求的整体结构简单轻便的发展的路线相悖。目前等同模式的研究重点已不是如何设置油路关系来达到精确的同步,而是出现误差时如何调整,现在主要采取的措施是对超前的执行机构停止供油,使落后的执行机构与超前执行机构并行,而通常液压油路中只有一个供油系统,超前执行机构的油路同样会被供以等同流量的液压油,所以在切断超前执行机构的供油时系统容易产生憋压溢流进而导致油路发热等问题。因此,如何解决超前油路的合理回油避免系统憋压溢流是目前的技术难点,另一方面,无论是等同模式还是主从模式,均会涉及电气控制系统的连接,因此如何实现反馈信号的准确传递及精确误差信号是未来发展的重点。

沈金峰 丁向华
国家知识产权局专利局专利审查协作北京中心
沈金峰,男,硕士,国家知识产权局专利局专利审查协作北京中心机械发明审查部,专利审查研究实习员,;丁向华,女,硕士,国家知识产权局专利局专利审查协作北京中心实用新型审查部,专利审查研究实习员。
10.3969/j.issn.1001-8972.2016.01.037
猜你喜欢
机械研究与应用(2022年3期)2022-07-25 02:59:48
科技与创新(2022年12期)2022-06-26 03:45:16
流体机械(2020年8期)2020-09-15 05:55:34
航天控制(2020年1期)2020-04-28 02:00:18
喜剧世界(2017年18期)2017-11-28 06:36:45
制造技术与机床(2017年10期)2017-11-28 05:24:04
石油管材与仪器(2017年4期)2017-09-11 14:24:00
制造技术与机床(2017年2期)2017-05-04 04:17:24
舰船科学技术(2015年8期)2015-02-27 15:38:46
航天返回与遥感(2014年5期)2014-07-31 17:57:09