
Fuzzy-PID复合控制在温室节水灌溉中的应用*
2016-08-25 02:32邵鹏飞曹江涛王志恒
传感器与微系统 2016年8期
邵鹏飞, 曹江涛, 桑 红, 王志恒
(辽宁石油化工大学 信息与控制工程学院,辽宁 抚顺 113001)
Fuzzy-PID复合控制在温室节水灌溉中的应用*
邵鹏飞, 曹江涛, 桑红, 王志恒
(辽宁石油化工大学 信息与控制工程学院,辽宁 抚顺 113001)
为解决温室节水灌溉的需求,综合考虑温室环境因子对灌溉量的影响,通过系统辨识的方法,建立被控对象土壤湿度的数学模型。针对湿度控制大滞后惯性环节的特点,设计了一种Fuzzy-PID复合控制的方法。该方法将模糊控制器和PID控制器并行结合,并采用梯形隶属函数的模糊切换算法进行两者的切换,实现两种控制方法的优势互补。实验仿真结果表明:Fuzzy-PID复合控制响应时间短、超调量小、稳态过程没有振荡,不仅具有较好的动态性能,而且具有比较理想的稳态品质,适用于温室节水灌溉控制。
节水灌溉; 土壤湿度; 灌溉量; 数学模型; Fuzzy-PID复合控制
0 引 言
发展温室高效节水灌溉可以缓解水资源短缺问题,世界上许多半干旱和干旱地区,通过改进灌溉技术的措施来节约水资源[1]。近年来,水资源的战略地位在我国越来越重要,温室节水灌溉发展具有重大意义[2]。温室环境系统中各环境因子间关系复杂,相互影响。我国很多地区温室灌溉依靠经验判断作物的需水量和设定土壤湿度阈值,难以保证作物在适宜的水分环境下生长和实现节水的目的。要执行有效的节水灌溉,前提是能准确地计算出温室作物灌溉需求量,然后采用合适的控制方法,适时适量进行灌溉。
目前,比例积分微分(proportion integration differentiation,PID)控制是温室灌溉控制中普遍采用的控制方法[3],这主要是因为PID控制算法简单,参数调整方便,在理论上有成熟的稳定性设计和参数整定方法[4]。但PID控制存在过渡过程时间和超调量之间的矛盾。90年代初,Holder R等人使用模糊控制的方法进行农田的灌溉决策,设计合适的模糊规则,来判断作物的灌溉量[5]。之后,有更多模糊控制方法在灌溉控制系统中的研究和应用。模糊控制在偏离工作点较远的区域可明显改善控制的动态性能。但模糊控制本身消除系统稳态误差的性能比较差,难以达到较高的控制精度。
理论研究和工程实践证明[6],对于温室湿度这样具有较大滞后性、非线性特点的控制对象,要想从根本上解决动态品质和稳定精度的矛盾,单纯采用PID控制或模糊控制都难以取得较好的控制效果。结合PID控制和模糊控制的特点,设计了一种由两种控制并行结合的控制方法,即Fuzzy-PID复合控制。根据温室环境因子温度、光照度和空气湿度,确定实时所需灌溉量,并根据灌溉量与土壤湿度关系,得到土壤湿度Hd作为定值,将其偏差及其偏差变化率作为系统的输入变量,实际灌溉量作为系统的输出。在温室灌溉电磁阀流量设定的前提下,可以得到电磁阀开启的时间,达到温室节水灌溉的技术要求。
1 Fuzzy-PID复合控制系统设计
1.1Fuzzy-PID复合控制设计思想
Fuzzy-PID复合控制采用分段控制的思想[7],依据梯形隶属函数的模糊切换算法进行切换控制。当偏差较大时,使用模糊控制,以加快响应速度,而在小偏差范围内转换为PID控制,消除静差,提高控制精度。Fuzzy-PID复合控制原理如图1所示。
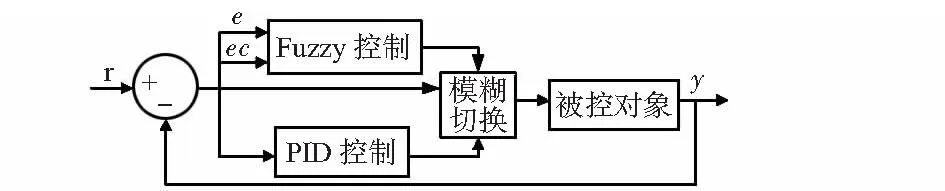
图1 Fuzzy-PID复合控制原理框图Fig 1 Principle block diagram of fuzzy-PID compound control
1.2模糊控制设计
模糊控制器中,输入变量分别为土壤湿度偏差e和偏差变化率ec,输出变量为灌溉量u,则实际变量表达式为
e(k)=Hd(k)-H(k)
(1)
ec(k)=e(k)-e(k-1)
(2)
U(k)=f(e(k),ec(k))
(3)
式中Hd(k),H(k)分别为在第k个采样时刻土壤湿度设定值和系统实测湿度值,f(·,·)表示输入输出之间的函数关系。
设置湿度偏差e和偏差变化量ec的基本论域分别为[-15,+15],[-3,+3],对应的离散论域E,EC为{-3,-2,-1,0,1,2,3},则量化因子ke=0.2,kec=1。输出量u为灌溉量,不存在负值,设其基本论域为[0,60],离散论域U为{0,1,2,3,4,5,6},则比例因子ku=10。
1.3模糊切换方案设计
依据预先设定的阈值进行自动切换的常规方法可能会引起扰动,影响控制效果。通过对温室湿度控制的实验研究,采用梯形隶属函数的模糊切换算法[8],即采用模糊推理实现两种控制方式的平稳切换。经过多次实验可知,当湿度偏差小于2 %RH时,PID控制效果较好,大于5 %RH时,模糊控制效果较好,得到温室灌溉控制模糊切换隶属度函数,如图2所示。

图2 模糊切换隶属度函数Fig 2 Membership function of fuzzy switching
模糊切换规则形式为
IfeisythenUF-PisUPID,elseUisUFuzzy.
式中UF-P,UPID,UFuzzy分别为复合控制器、PID控制器和Fuzzy控制器的输出。当输入偏差为e时,令λ=y(e),即
(4)
则UPID控制权重为λ,其相应的UFuzzy的控制权重为(1-λ),最后采用加权平均法计算,得到控制器的最终输出UF-P为
UF-P=λUPID+(1-λ)UFuzzy
(5)
2 被控对象模型辨识
通过温室灌溉测量实验,辨识被控对象土壤湿度的数学模型。实验采用微灌形式,水流量为1 mL/s。在被辨识对象上施加一个单位阶跃信号,选用YL—69土壤湿度传感器进行湿度数据采集,实时记录实验的时间(灌溉量)、土壤湿度对应值,然后测定对象的响应随时间变化的曲线,如图3所示。从曲线图可以看出,数学模型可由一阶惯性滞后环节近似表示。采用两点法[9]进行模型辨识。
令被控对象的传递函数为
(6)
增益K为
(7)
式中Δμ0为系统输入变化量。
设随时间变化对应的土壤湿度值为y(t),将y(t)转换成它的无量纲形式y*(t),即
y*(t)=y(t)/y(∞)
(8)
则
Ty*(t-τ)+y*(t-τ)=1
(9)
可得阶跃响应无量纲形式为
(10)
选定两个时刻t1和t2,其中,t2>t1≥τ。
为了计算方便,一般取y*(t1)=0.39y(∞),y*(t2)=0.63y(∞),可得计算参数T和τ的公式
(11)
取实验数据代入求得传递函数为
(12)
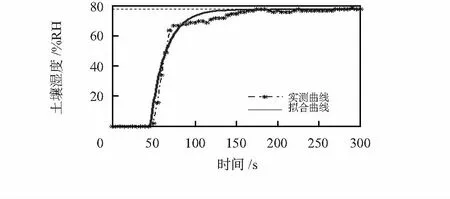
图3 被测对象模型辨识结果Fig 3 Model identification results of the measured object
从辨识模型的阶跃响应曲线与实际测量曲线的对比结果可以看出,辨识结果和实际效果接近。
3 灌溉控制流程设计
温室在不同时间段环境因子不同,则作物灌溉量需求不同,对应的土壤湿度最适值也不同。以夏季黄瓜为例,文献[10]给出灌溉量与环境因子之间的相关关系为
Q0=2.872exp(0.008 59x1-0.005 53x2+0.031 9x3)
(13)
y(t)=(-78)*heaviside(t-46)*(exp(46/19-
t/19)-1)
(14)
令微灌水流量为1 mL/s,则t=Q0,得土壤湿度设定值Hd=y(t)。
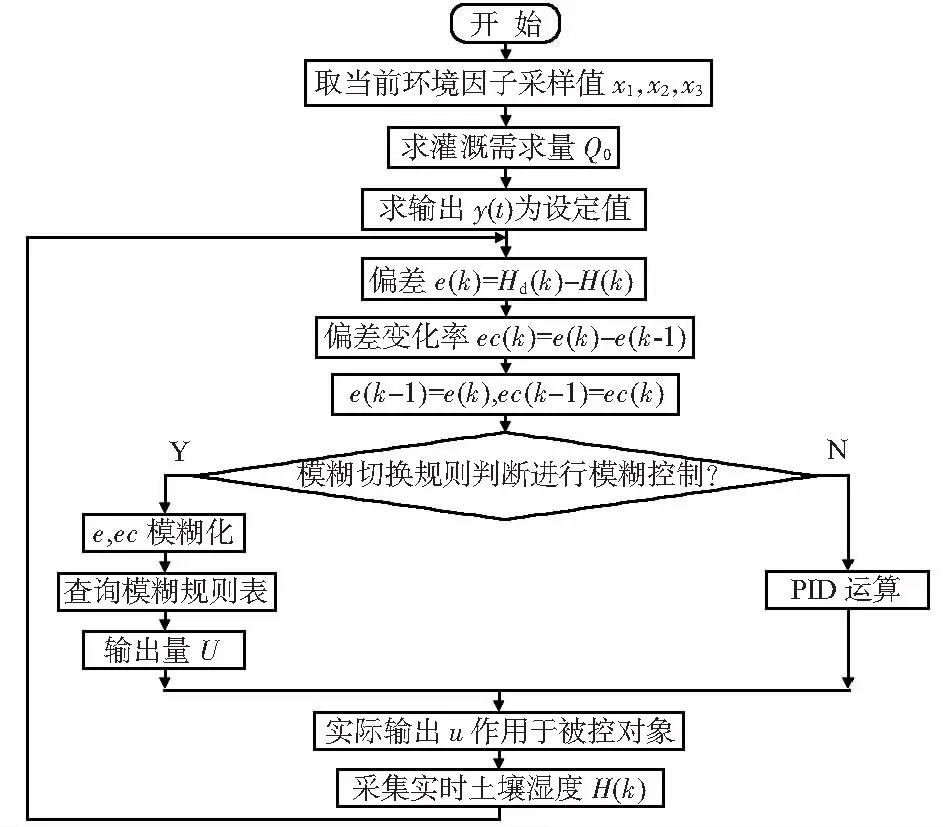
图4 温室节水灌溉控制流程图Fig 4 Control flow chart of greenhouse water saving irrigation
图4是温室节水灌溉控制流程图。可根据经验和作物需求,分时间段开启自动灌溉控制,维持作物适宜生长的湿度环境。
4 仿真测试与结果
在Simulink仿真环境下,分别采用PID,Fuzzy和Fuzzy-PID复合控制算法进行仿真实验,以验证Fuzzy-PID复合控制的有效性和优越性。
其中,PID参数kp=0.005,ki=0.000 19,kd=0.06,由Z-N经验公式整定并经优化调整获得。PID,Fuzzy和Fuzzy-PID相同部分采用相同的控制参数。
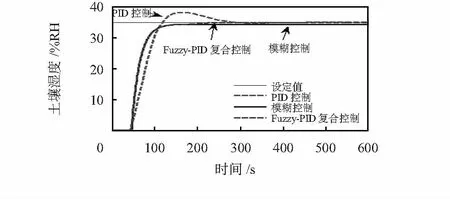
图5 设定值为35 %RH阶跃变化的响应结果Fig 5 Response result of step change while setting value is 35 %RH
图5是土壤湿度设定值为35 %RH阶跃变化的响应结果,其中,PID控制存在9.4 %的超调量和较小的振荡,调节时间长;模糊控制存在较明显的误差(约为2 %);采用Fuzzy-PID复合控制,系统的调节时间和稳态性能相比于PID控制得到缩短和提高,调节精度相比于模糊控制高,稳态误差小。
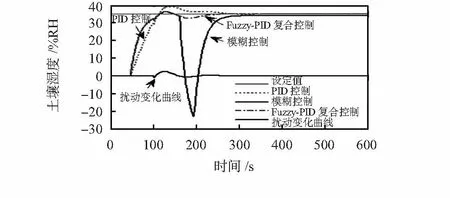
图6 扰动变化下的控制效果Fig 6 Control effect of disturbance change
从仿真结果和表1性能指标对比可知:在温室节水灌溉中采用Fuzzy-PID复合控制是适用的。重要的是,Fuzzy-PID复合控制在保证上述优点的同时不存在超调。在温室灌溉中,如果灌溉量过大,湿度的增大会引起其他环境因子的变化,容易出现低温高湿,导致作物沤根的现象,对作物生长生产带来不利影响。仿真研究结果表明:Fuzzy-PID复合控制算法控制温室节水灌溉更具优越性。
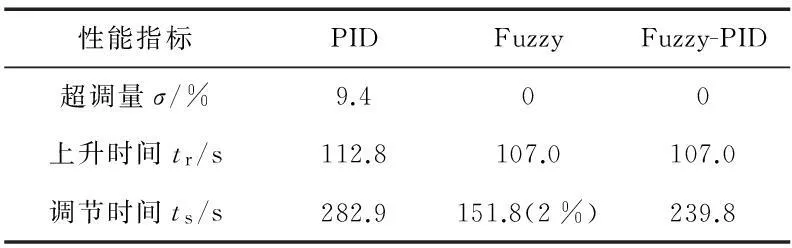
表1 控制性能指标比较
5 结束语
温室节水灌溉系统综合考虑了温室环境因子与灌溉量的关系,可实时得到最适合作物生长需求的温室土壤湿度值,满足何时灌、灌多少的要求,实时控制更加精确。PID控制和模糊控制并行结合的控制方法,既具有PID控制精度高的优点,又具有模糊控制动态响应快、适应性强的优点。采用梯形隶属函数的模糊切换算法,实现了PID控制与模糊控制的平稳切换,避免了采用设定阈值切换方法可能出现的振荡。
[1]Törnqvist R,Jarsjö J.Water savings through improved irrigation techniques:Basin-scale quantification in semi-arid environment-s[J].Water Resources Management,2012,26(4):949-962.
[2]陈晓燕,庞涛.基于ZigBee网络的温室节水灌溉系统设计[J].传感器与微系统,2013,32(5):82-85.
[3]Domingues J,Valério D,da Costa J S.Rule-based fractional control of an irrigation canal[J].Journal of Computational and Nonlinear Dynamics,2011,6(2):024503.
[4]张化光,孟祥萍.智能控制基础理论及应用[M].北京:机械工业出版社,2013:115-135.
[5]Holder R,Cockshull K E.Effects of humidity on the growth and yield of glasshouse tomatoes[J].Journal of Horticultural Science,1990,65(1):31-39.
[6]Shamsuzzoha M. Robust PID controller design for time delay processes with peak of maximum sensitivity criteria[J].Journal of Central South University,2014,21(10):3777-3786.
[7]Kukolj D D,Kuzmanovic S B,Levi E.Design of a PID-like compound fuzzy logic controller[J].Engineering Applications of Artificial Intelligence,2001,14(6):785-803.
[8]王孝红,张加良,于宏亮.Fuzzy-PID复合控制在水泥冷却过程中的应用[J].控制工程,2011,18(2):232-235.
[9]刘金琨,沈晓蓉.系统辨识理论及Matlab仿真[M].北京:电子工业出版社,2013:80-82.
[10] 黄红霞.温室作物灌溉量决策支持系统研究[D].镇江:江苏大学,2005.
邵鹏飞(1991- ),男,安徽淮北人,硕士研究生,主要从事无线传感器网络技术的应用研究。
Application of fuzzy-PID compound control in greenhouse water saving irrigation*
SHAO Peng-fei, CAO Jiang-tao, SANG Hong, WANG Zhi-heng
(School of Information and Control Engineering,Liaoning Shihua University,Fushun 113001,China)
In order to solve the needs of water saving irrigation in greenhouse,considering the effects of environmental factors in greenhouse on irrigation amount,establish mathematical model for soil humidity of the controlled object by using system identification method.Aiming at characteristics of humidity control lag inertia link,a method of fuzzy-PID hybrid control is designed.The method combines fuzzy controller with PID controller,and fuzzy switching algorithm based on trapezoidal membership function is used to switch between the two controlling methods,which realizes complementary advantages.Simulation results show that the fuzzy-PID hybrid control has short response time,small overshoot,no oscillations in steady state,and so on.Also it not only has good dynamic performance,but also has ideal steady quality,which is suitable for greenhouse water-saving irrigation control.
water saving irrigation; soil humidity; irrigation quantity; mathematical model; fuzzy-PID compound control
2015—11—02
国家自然科学基金资助项目(61203021)
TP 273
A
1000—9787(2016)08—0144—04
DOI:10.13873/J.1000—9787(2016)08—0144—04
猜你喜欢
遥测遥控(2022年1期)2022-02-11
天津农林科技(2020年3期)2020-08-13
电子制作(2019年15期)2019-08-27
中国惯性技术学报(2017年1期)2017-06-09
西南交通大学学报(2016年3期)2016-06-15
电子制作(2016年21期)2016-05-17
通信电源技术(2016年5期)2016-03-22
高原山地气象研究(2016年4期)2016-02-28
高原山地气象研究(2016年4期)2016-02-28
西北工业大学学报(2015年1期)2016-01-19
