
基于圆锥反射微小孔径工件内壁图像检测方法*
2016-08-25 02:32吴俊杰陆文俊丁国清
传感器与微系统 2016年8期
游 睿, 吴俊杰, 陈 欣, 陆文俊, 丁国清
(上海交通大学 仪器科学与工程系,上海 200240)
基于圆锥反射微小孔径工件内壁图像检测方法*
游睿, 吴俊杰, 陈欣, 陆文俊, 丁国清
(上海交通大学 仪器科学与工程系,上海 200240)
介绍一种新型的基于圆锥反射镜的内壁图像获取方法,用以检测4~10 mm孔径的内壁图像。在小孔内引入圆锥反射镜作为反射装置;采用工业CCD相机作为图像采集设备,用以获取反射镜上的反射图像;利用数字图像处理技术将圆环形图像变换为矩形展开图。方案简单新颖,具有可行性和实用价值,且获得图像分辨率高,由理论计算可达10 μm级别。
微小孔; 内壁; 图像检测; 圆锥反射镜; 数字图像处理
0 引 言
微小孔径(10mm以下)工件的内壁瑕疵检测,一直以来都是一个难题。现有的小孔内壁检测方法包括:人工目测方法,涡流检测法[2]、超声波法[3]、激光散斑法[4]和漏磁法[5]等。涡流检测法在检测过程中受到干扰的变化因素太多,不利于控制,且被测工件必须是金属材质;激光散斑法可迅速得到缺陷的具体位置,精度很高,但是通过计算统计信息来得到表面特征,无法直接进行观察;超声波法利用探头在工件上逐点进行检测,效率很低,且人为主观判断因素较大;漏磁法空间分辨率低,干扰因素多,检测结果粗糙。并且以上方法最大的缺点是无法直接得到内壁图像文件以进行观察和保存。
本文介绍一种新的基于圆锥反射镜的内壁图像检测方法,将其置入工件内部,可用于小于10 mm的小孔工件内壁图像检测,获取高精度内壁展开图像。同时,利用数字图像处理技术,变换为工件内壁360°全景展开图像,并计算由反射镜与被测工件间的定位偏差带来的展开图像精度误差。
1 检测原理
1.1系统方案
检测系统原理图如图1所示(为了便于观察,图1中部件大小比例有所修改)。
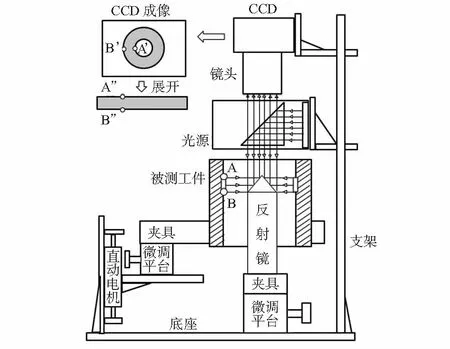
图1 检测原理与装置系统示意图Fig 1 Diagram of detecting principle and device system
检测之前,首先利用夹具和微调平台调整反射镜和工件相对位置,保证两者中心在同一竖直线上。打开白色LED同轴光源,从工件上部竖直向下射入均匀明亮的平行白光。本方案采用顶角为90°的圆锥形反射镜,竖直向下的光线经过反射成为水平的平行光,充分照亮工件内壁。同时,被照亮的内壁部分,反射光线也经过圆锥反射镜二次反射,竖直向上,穿过同轴光源,被CCD捕获并成像,即照明光线和反射成像光线光路合二为一。
如图1所示,假设工件内壁表面同一母线上有A,B两点,A点相对位置更高。此两点的反射光线经过反射进入镜头,对应A′,B′ 两点,则内壁上A,B两点高度范围的内壁圆柱形图像经过系统反射,最终在CCD中成像为一个同心圆环,此圆环图像即包含了工件内壁A,B范围的图像信息。利用数字图像处理技术,对获得的此圆环图像进行图像坐标变换,可将其变换为矩形图像,即为原工件A,B高度范围内的全景展开图像。
固定反射镜位置,使用一轴平移电机作为机械运动装置,以一定步长带动工件在径向平移,获取不同高度范围的工件反射图像。
1.2分辨率计算
定义圆锥反射镜成像面上周向的分辨率为横向分辨率Sh,径向的分辨率为纵向分辨率Sv。如图2所示,设圆锥反射镜的直径为d,周长为πd,工件内壁直径为D,周长为πD,镜头放大倍数为k,CCD的像元尺寸即每像素分辨率为SCCD。由圆锥反射镜“上小下大”的结构,易知圆锥反射镜直径越大处分辨率越高,反射镜直径越小处分辨率越低。
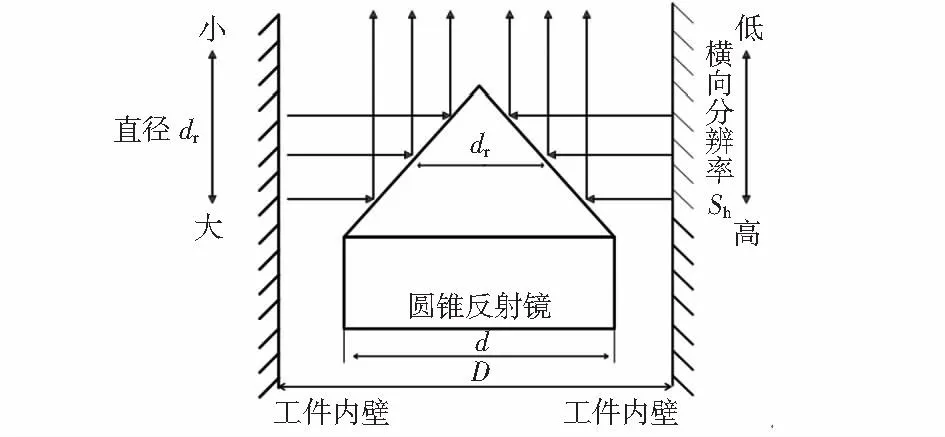
图2 反射镜上部分辨率低,下部分辨率高Fig 2 Resolution is lower in the upper part and higher in the lower part of reflector
若设反射镜表面上某圆环处直径为dr,则该处在反射镜上反射成像的圆周长为πdr,其对应的实际工件内壁圆周直径为πD。则易知该处成像图形的横向分辨率Sh是dr的函数,计算公式为
即
(1)
式中Sh为dr处对应的横向分辨率,D为工件直径,SCCD为CCD的像元尺寸,dr为圆锥反射镜上某处直径,k为镜头放大倍率。
本方案中,由于反射镜顶角为90°,在工件轴向上,内壁实际图像与CCD中成像的图像是等比例的,没有放大缩小因素。因此,纵向分辨率Sv等于CCD镜头分辨率与镜头放大倍率之商,即
(2)
本方案系统采用的实际参数如下:被测工件内孔径D为4.5 mm,圆锥反射镜直径d为4 mm,镜头放大倍率k为1倍,CCD像元尺寸SCCD为3.45 μm每像素。
因此,理论上在圆锥最大直径处横向分辨率为

(3)
当dr减小,CCD中成像圆的直径会缩小,则Sh会相应增大。若分辨率临界值为10 μm,则可依此计算dr的最小值dmin为

(4)
因此,理论上,在圆锥反射镜面上直径1.55 mm≤dr≤4 mm的镜面范围内,所得图像横向分辨率可达到10 μm。横向分辨率Sh及纵向分辨率Sv与反射镜上某处直径dr的关系曲线图如图3所示。
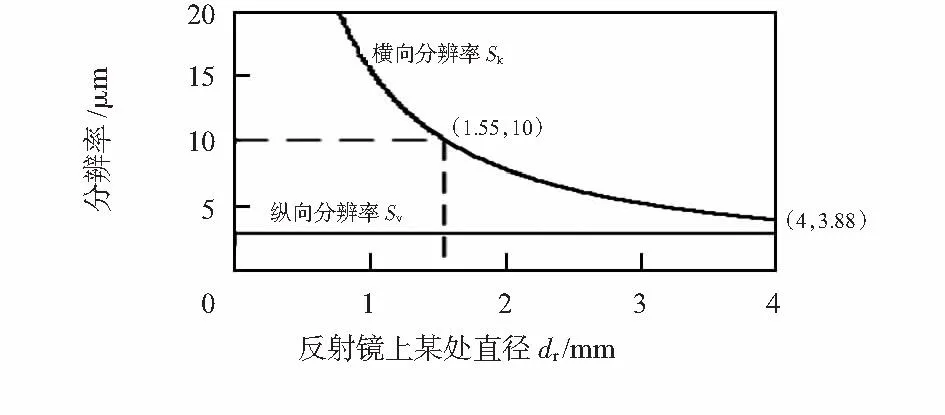
图3 分辨率与反射镜某处直径dr的关系曲线图Fig 3 Relation curve of resolutions and dr
1.3检测流程图
检测系统流程图如图4所示。
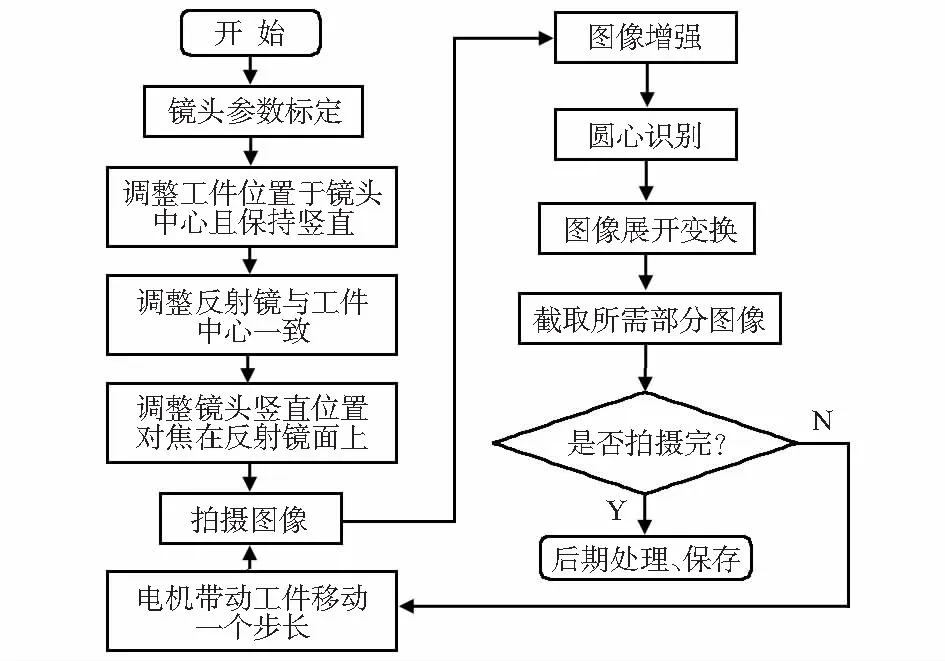
图4 检测系统流程图Fig 4 Fow chart of detecting system
2 图像处理
2.1预处理
如图5~图7所示,对采集得到的原始图像依次采用空间滤波处理和直方图均衡化处理。明显可以发现:处理后的图像效果得到增强,图像细节更加突出,灰度直方图更加均衡。
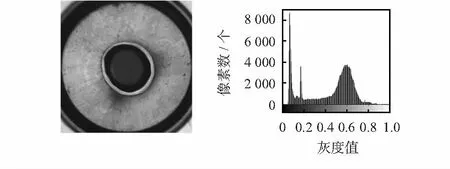
图5 原图及其灰度直方图Fig 5 Original image and its greyscale histogram
2.2圆心识别
图像展开以反射镜圆心为基础,为了准确地将CCD获得的圆形的内壁反射图像展开成矩形的360°图像,首先需要能够精确地找到反射镜中心和工件内壁的中心所在图8中的位置。利用数字图像处理技术,将原始图像转化为二值化图像,并以8联通方法[6]标示出图像中所有的联通区域,以区域面积、直径大小等判定条件甄别出工件内壁区域和反射镜区域,分别计算其质心,得到工件内壁的圆心和反射镜的中心坐标位置。
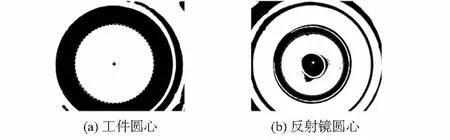
图8 圆心识别过程Fig 8 Process of circle center recognition
2.3图像展开变换
由检测原理可知,CCD直接采集得到的图像是一个圆形的图像。为了得到工件内壁的展开图像,需要基于一定的坐标系变换,将图像展开。由数字图像理论可知,一幅数字图像可定义为一个二维函数f(x,y),其中,x和y分别代表该点的空间坐标,f(x,y)代表了该点处图像的灰度值[7]。要完成上述图像变换,需要将原始图像矩阵与展开结果图像矩阵中的每一个像素点形成一一映射,再通过插值法填补像素点之间缺少的灰度值。
其原理如图9所示,理论上,展开图像上的每一点P'(u,v)均可在原图像中找到对应映射点P(x,y)。
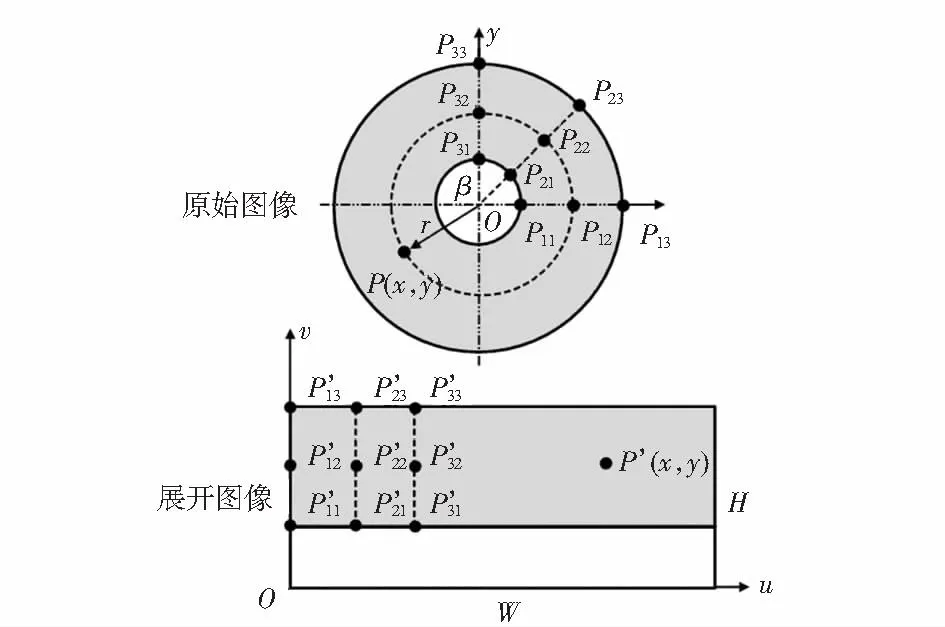
图9 图像展开原理示意图Fig 9 Principle diagram of image expansion
将原始图像中的点用极坐标公式表示如下
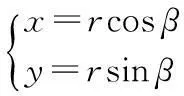
(5)
原始图像半径为R, 工件内壁直径为D,在展开图像中,图像为一个W×H大小的二维矩阵,则P'坐标可如下得到
(6)
由此,则建立两幅图像的坐标系变换公式如下
(7)
若设定展开图像W为πD,H为D/2,则变换公式可简化为
(8)
由此一一对应关系,就能得到转换后图像的图形矩阵。由于原始圆环中直径较大的外圆周长更长,圆周上包含的像素点更多;直径较小的内圆周长更短,圆周上包含的像素点更少,所以,得到的坐标P′(u,v)不一定正好有对应的像素点。此时,一般选择去余取整来实现。采用双线性插值法填充缺少的像素点,即用离P′点最近的4个元素取其平均值,作为P′点的灰度值。
2.4图像变换结果
如图10所示,利用数字图像处理方法,将获取的内壁圆形图像展开为矩形图像,可直观观测工件内壁图像信息。并截取出满足分辨率要求的一部分图形,以用做后期其他处理。在图中可以清楚看到有一个缺陷A,经过图像变换依然出现在相应位置。
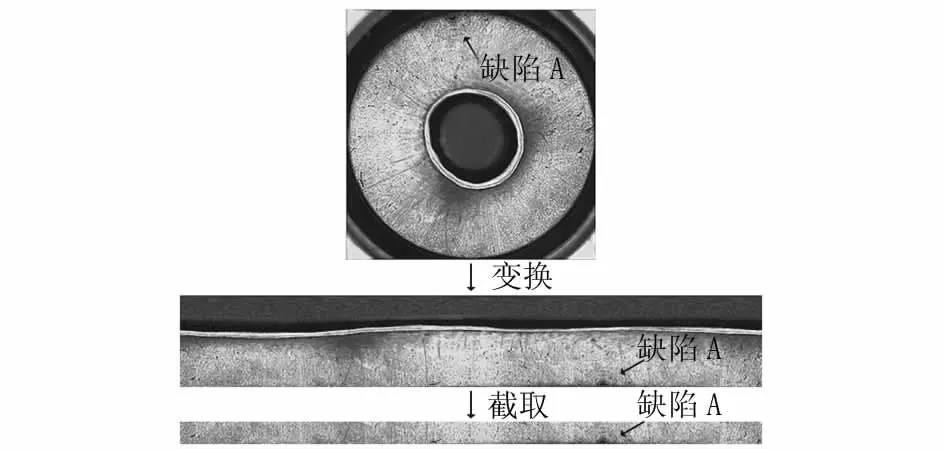
图10 图像展开结果Fig 10 Result of image expansion
3 误差分析
本方案中主要可能出现的误差因素包括:工件中心和反射镜中心不同心;工件内壁、反射镜相对CCD镜头倾斜;圆心计算算法误差;圆锥反射镜面加工误差;CCD与镜头安装误差等。可通过设计精密微调装置,减小其对实验结果的影响。对实验结果影响最大的误差来自于工件中心和反射镜中心定位偏差。
理想状态下圆锥反射镜应与被测工件内壁中心保持同心。但实际安装过程中,存在机械定位误差,因此,必然会有中心定位误差O1O2,令其为e。另设工件内径半径为R,反射镜最大半径为r。图11是圆锥反射镜在工件内部俯视图。
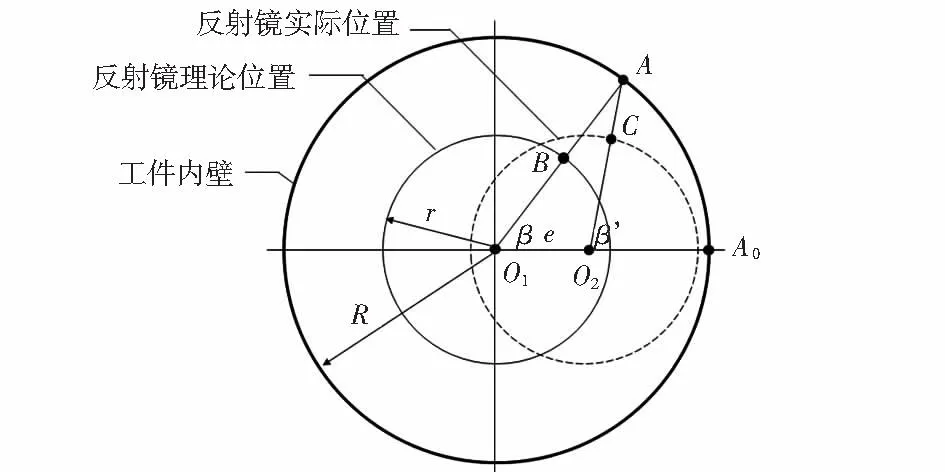
图11 工件和反射镜定位偏差示意图Fig 11 Diagram of workpiece and reflector positioning
设工件内壁上有一点A,在反射镜理论外圆和实际外圆上成像点分别为B(r,β),C(r,β′),则B为理论准确位置,C为实际位置。已知两点存在一个圆心角偏差Δβ=β′-β。在三角形ΔAO1O2中由正弦定理可知
则可推知
(9)
由2.3节图像展开原理可知,圆形反射图像上B,C两点在O1,O2极坐标系的坐标分别为B′(u1,r),C′(u2,r),且
(10)
展开图像误差Δu最大值随着工件中心偏差e增加单调递增。在本方案中,r=d/2=2 mm,R=D/2=4.5 mm。若利用精密定位平台将e控制在10 μm以下,则由其带来的展开图像误差最大不超过10 μm。
4 结束语
本文介绍了一种基于圆锥反射镜的微小(孔径10 mm以下)孔径工件内壁检测方法。此方法可快速、准确地获取工件内壁展开图像,用以缺陷检测。与传统方法相比,方案新颖简单,且分辨率和准确率高;并可直接获得图像文件进行保存,以便后续缺陷处理;且通过设计精密微调装置减小误差,若调整中心定位误差不超过10 μm,则由此带来的展开图像定位误差不超过10 μm,验证了方案的可行性,可作为一种用于微小孔径内壁检测的新方案,解决小于10 mm孔径微小工件的内壁图像检测难题。
[1]蔡桂喜,董瑞琪,高俊武,等.小口径薄壁管超声探伤[C]∥第八届全国无损检测新技术学术会议,大连,2002:34-37.
[2]Angani C S,Park D G,Kim C G,et al.Pulsed eddy current differential probe to detect the defects in a stainless steel pipe[J].Journal of Applied Physics,2011,109(7):07D348—1-07D348—3.
[3]Cai Q,Yang P,Wang L,et al.Test analysis of key technology in ultrasonic defect detection of concrete filled steel tube[J].Buil-ding Structure,2011,41(3):81-83.
[4]Françon M,Dainty J C.Laser speckle and applications in optic-s[J].Physics Today,1980,33:149-158.
[5]Nara T,Takanashi Y,Mizuide M.A sensor measuring the Fourier coefficients of the magnetic flux density for pipe crack detection using the magnetic flux leakage method[J].Journal of Applied Physics,2011,109(7):305-307.
[6]林卉,赵长胜,舒宁.一种新的基于连通成分的边缘评价方法[J].国土资源遥感,2003,15(3):37-40.
陈欣,通讯作者,E—mail:xchen.ie@sjtu.edu.cn。
An image detection method for inside wall of small-hole workpiece based on cone reflect*
YOU Rui, WU Jun-jie, CHEN Xin, LU Wen-jun, DING Guo-qing
(Department of Instrument Science and Engineering,Shanghai Jiao Tong University,Shanghai 200240, China)
Introduce a new method for image acquisition of inside wall of 4~10 mm diameter holes.A cone reflector is placed inside the hole for the reflection and a CCD to acquire the reflection image.Besides,digital image processing technique is used in the image conversion.The method is innovative and easy to realize.It has high feasibility and practical value,besides,the image resolution is up to 10 μm level by theoretical calculation.
small-diameter hole; inside wall; image detection; core reflector; digital image processing
2015—10—26
国家重大科学仪器设备专项(2014YQ090709)
TH 741
A
1000—9787(2016)08—0008—04
游睿(1991-),男,重庆人,硕士研究生,主要研究方向为精密视觉检测、图像处理。
DOI:10.13873/J.1000—9787(2016)08—0008—04
猜你喜欢
新能源科技(2022年9期)2022-11-20
中学生数理化(高中版.高考理化)(2022年5期)2022-06-01
中等数学(2021年6期)2021-08-14
小学生学习指导(高年级)(2021年6期)2021-06-19
文物季刊(2021年1期)2021-03-23
哈尔滨轴承(2021年4期)2021-03-08
环境技术(2020年1期)2020-03-06
中国临床医学影像杂志(2019年5期)2019-01-07
制造技术与机床(2017年10期)2017-11-28
光学精密工程(2016年6期)2016-11-07
