
动基座下的运动目标检测
2016-08-23 06:37:49陆牧,高扬,朱明
光学精密工程 2016年7期
陆 牧,高 扬,朱 明
(中国科学院 长春光学精密机械与物理研究所 航空光学成像与测量重点实验室,吉林 长春 130033)
动基座下的运动目标检测
陆牧*,高扬,朱明
(中国科学院 长春光学精密机械与物理研究所 航空光学成像与测量重点实验室,吉林 长春 130033)
由于动基座下运动目标的检测存在的背景干扰较大,影响运动目标检测精度的问题,本文提出了一种基于傅里叶变换和核函数-灰度统计图的动基座动目标检测算法,以便较大限度地克服光照变化、背景噪声对运动目标检测精度造成的影响。该算法首先将评价函数引入特征匹配块的选取中完成视频图像背景的分块匹配。然后,采用傅里叶变换的相位相关算法估计全局运动补偿参量;逐一计算各图像子块的高斯核函数值,建立核函数-灰度统计图并通过相邻帧高斯核函数值的变化情况判断运动目标的区域。最后,对包含运动目标的图像子块进行图像分割处理,完成动目标检测。实验仿真表明,与传统的运动目标检测算法相比,该算法中评价函数的评价系数α取0.7,帧间图像块相似度阈值T取0.3时,能有效地抑制光照变化和噪声带来的背景干扰,检测出动基座下的运动目标。该算法具有较快的计算效率,能满足工程上的实时性要求。
运动目标检测;动基座;正交傅里叶变换;核函数—灰度统计图
1 引 言
运动目标检测技术是计算机视觉领域中关键的底层技术之一,也是计算机视觉领域研究的热点。基于动基座的运动目标检测技术是运动目标检测技术中的重点、难点,在国防、安保等领域中也有着更加广阔的应用前景和发展空间[1-8]。按照所检测视频图像背景的性质,运动目标检测技术可分为两种:静态背景运动目标检测和动态背景运动目标检测。目前,主流的静态背景运动目标检测方法有背景差分法和帧间差分法[8-11]:背景差分法的优点在于算法简单易于实现,但其缺点也很明显,即在背景有干扰的情况下检测效果不佳;帧间差分法的优点是检测精度高、算法运行速度较快,但缺点是该算法只能应用于背景是静态的视频图像。主流的动态背景运动目标检测方法有全局运动补偿法和光流法[12-15]:全局运动补偿法又可分为块匹配法、位平面法和特征匹配法,这些方法各有优缺点,它们对视频图像背景均比较敏感,不适合视频图像背景干扰较大的情况;光流法适合处理运动目标有遮挡的情况,但抗噪性较差并且对视频中光照的改变十分敏感。动基座动目标检测是动态背景运动目标检测的一个重要分支,也是目前运动目标检测领域的重要课题,其特点为基座运动无死角,设备工作环境复杂,在一些特定的场合中背景干扰较大。这些特点给动基座下运动目标的检测带来了一定难度。
基于动基座的上述特点,本文先将评价函数引入到匹配特征块的选取过程中,这样不仅能选取到背景噪声较小的特征块,而且还能减小后续全局运动补偿操作中特征块的误匹配率。然后采用傅里叶变换的相位相关算法将动态图像序列静态化。这种算法只需计算视频图像傅里叶互功率谱和傅里叶变换幅值谱的相关信息,与视频图像内容的关系较小,因此这种算法具有较好的抗噪性。最后,提出了一种核函数—灰度统计图,并通过相邻帧核函数—灰度统计图的变化实现了运动目标的检测。由于核函数—灰度统计图的空间分布情况不受背景光照改变和噪声大小的影响,因此能有效抑制背景干扰,并具有较快的计算效率。
2 运动目标检测
针对动基座动目标检测中基座运动平稳,基座运动速度相对较慢的特点,实验研究发现,相邻帧图像间背景的运动可以近似简化成二维平移运动。为了消除大目标运动对背景图像运动产生的影响,可将视频图像分成若干个不同的子块,并假设各子块中各像素点的运动方向与该子块形心所在像素点的运动方向一致。采用视频图像特征块匹配方法对硬件的依赖度较小,在一定程度上抑制了背景噪声对运动补偿的影响。
2.1匹配特征块的选取
由于在背景噪声较大的条件下较难获得高精度的匹配图像,为了减小图像匹配误差对运动目标检测精度的影响,故要求在匹配特征块的选取过程中尽量选取那些包含细节多、包含运动目标少的特征块[16-17]。因此,在匹配特征块的选取过程中引入了评价函数。首先,将视频图像分成m×n个大小相同的矩形块。由于视频图像中运动目标的位置常出现在图像的中心位置附近,所以选取图像中4个边缘附近的若干矩形块,分别进行图像相邻帧间的差分运算,从而得到差分图像。然后,计算各差分图像的评价函数值,评价函数为:
f=αμ+(1-α)σ,
(1)
其中:μ、σ分别是差分图像的期望和标准差,α是评价系数。最后,选取评价函数值最大的矩形块作为图像的特征块。
这样粗选取的特征块包含细节较多,降低了匹配特征块时的误匹配率,抑制了背景噪声对运动补偿的影响。值得注意的是,评价系数α的选取与背景噪声、光照等条件有关,本文根据多次试验结果将α取为0.7。
2.2全局运动补偿
全局运动是指在拍摄过程中由于相机运动造成原本静止的背景相对于相机所产生的运动。背景的这种从一个相对位置转换到另一个相对位置的映射关系满足仿射变换模型。一个仿射变换是一个非奇异的线性变换接上一个平移变换[18-19]。它的矩阵表达为:

(2)
式中:各背景像素点的坐标位置从(px,py)变换到(qx,qy),s为放缩系数,θ为旋转角度,(tx,ty)为平移参数。全局运动补偿的关键就是如何精确估计出上述背景运动的各项参数。鉴于正交傅里叶变换[14]和圆傅里叶变换[20-22]的相位相关算法在估计全局运动参数方面具有抑制背景光照、噪声干扰的优点,具有较高的估计精度,本文选用这两种方法进行参数估计。
根据仿射变换矩阵表达式,假设特征块图像f1(px,py)沿x轴正方向和y轴正方向分别平移了tx与ty,得到当前帧特征块图像f2(qx,qy),由:
f2(qx,qy)=f1(px+tx,py+ty).
(2)
对于相同背景下特征块的平移,不妨令px=qx=x,py=qy=y,得式:
f2(x,y)=f1(x+tx,y+ty).
(3)
将上式做正交傅里叶变换得:
F2(u,v)=F1(u,v)e-j2π(utx+vty).
(4)
求得特征块图像f1(px,py),f2(qx,qy)的傅里叶互功率谱[23]为:

(5)

L-1(e-j(utx+vty))=δ(x-tx,y-ty),
(6)
其中L-1为傅里叶逆变换。
可以看出傅里叶互功率谱的逆变换为一个二维脉冲函数,由该二维脉冲函数图像可求得平移参数为(20,0),如图1所示。
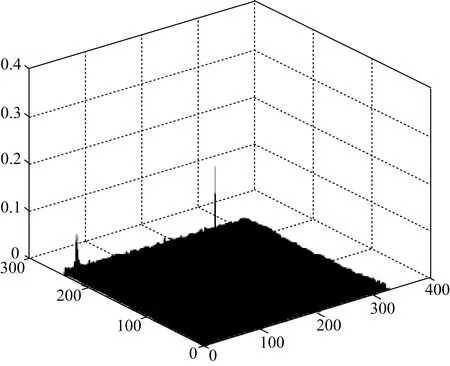
图1 平移参数的二维脉冲函数
同理,引入放缩系数s和旋转角度θ后,式(3)变为:
f2(x,y)=f1[s(xcosθ+ysinθ)-
tx,s(-xsinθ+ycosθ)-ty],
(7)
则上式两边的傅里叶变换幅值谱[24-25]为:

s-1(-usinθ+vcosθ)]|.
(8)
由式(8)可知傅里叶变换幅值谱只与放缩系数s和旋转角度θ有关,与平移参数(tx,ty)无关。
由于上述笛卡尔坐标系下的放缩变换和旋转变换在对数极坐标系下将转化为平移变换,因此可以根据上述相位相关算法求得放缩系数s和旋转角度θ。将式(7)变换到对数极坐标系下有:
f2(lnρ,Θ)=f1(lnρ-lns,Θ-θ),
(9)
其中:ρ为对数极坐标系下的极径,Θ为对数极坐标系下的极角。
因为式(9)与式(3)具有相似形式,可以计算式(9)的傅里叶互功率谱并根据上述步骤求得放缩系数s和旋转角度θ。将式(3)利用极坐标变换,得到式(9)的形式,可以看出s=1,θ=0。
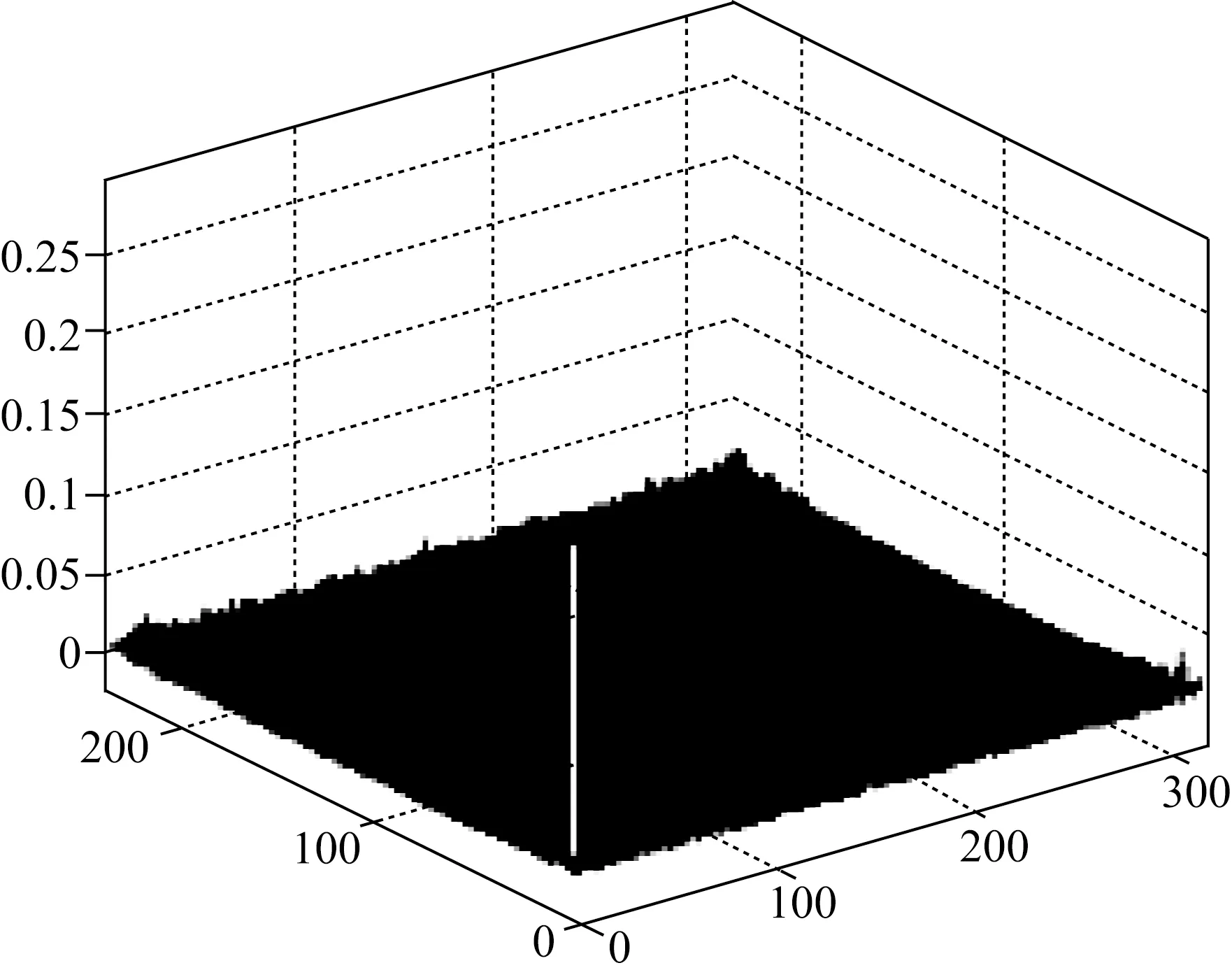
图2 放缩系数和旋转角度的二维脉冲函数
Fig.2Scaling factor and rotation angle of two-dimensional pulse function
2.3基于高斯核函数的目标检测
动态背景视频图像完成全局运动补偿以后,可以近似看成静态背景视频图像,再利用静态背景下的运动目标检测算法检测运动目标。经典的静态背景下运动目标检测算法有背景差分法和帧间差分法。背景差分法对于全局运动补偿的精度要求较高,并不能较好地处理动基座这种所采集视频图像背景噪声较大的情况[26]。传统的帧间差分法也不能很好地解决视频图像中由于光照变化、噪声等带来的影响[27]。针对动基座动目标检测的特点,本文提出根据相邻帧高斯核函数值的变化情况实现动基座动目标的检测。本文将图像分为32×32的子块,通过平均梯度最大块快速配准图像序列,再计算各个子块的灰度加权核函数(GWK),并根据bhattacharyya系数判断子块GWK函数的相似度,提取GWK函数发生变化的子块,通过合并处理,即找到图像中包含运动目标的区域。
直方图是图像的一种统计表达,对一幅灰度图像,其灰度统计直方图反映了该图中不同灰度级出现的统计情况。图像的灰度统计直方图是一个1-D的离散函数,可写成:
h(k)=nk(k=0,1,…,L-1),
(10)


(11)

(12)
其中δ(x)为单位脉冲函数。k(x)为高斯核函数,其表达式可简化为:
k(x)=exp(-‖x‖2).
(13)


(14)
其中n为视频图像块归一化特征向量的维度。ρ值越大则表明帧间图像块的相似度越高,当ρ值小于阈值T时即可认为图像块中包含运动目标。再将包含运动目标的图像块做图像分割处理,即可检测出完整的运动目标。根据多次实验仿真结果,本实验中阈值T取0.3。

(15)
3 实验结果及分析


(a)第56帧视频图像

(b)第76帧视频图像

(c)第56帧的灰度图像
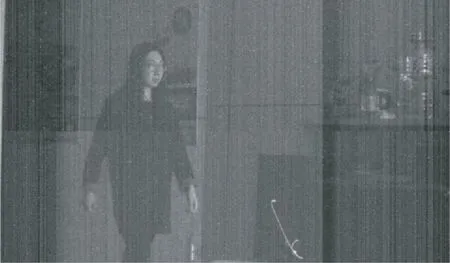
(d)第76帧的灰度图像
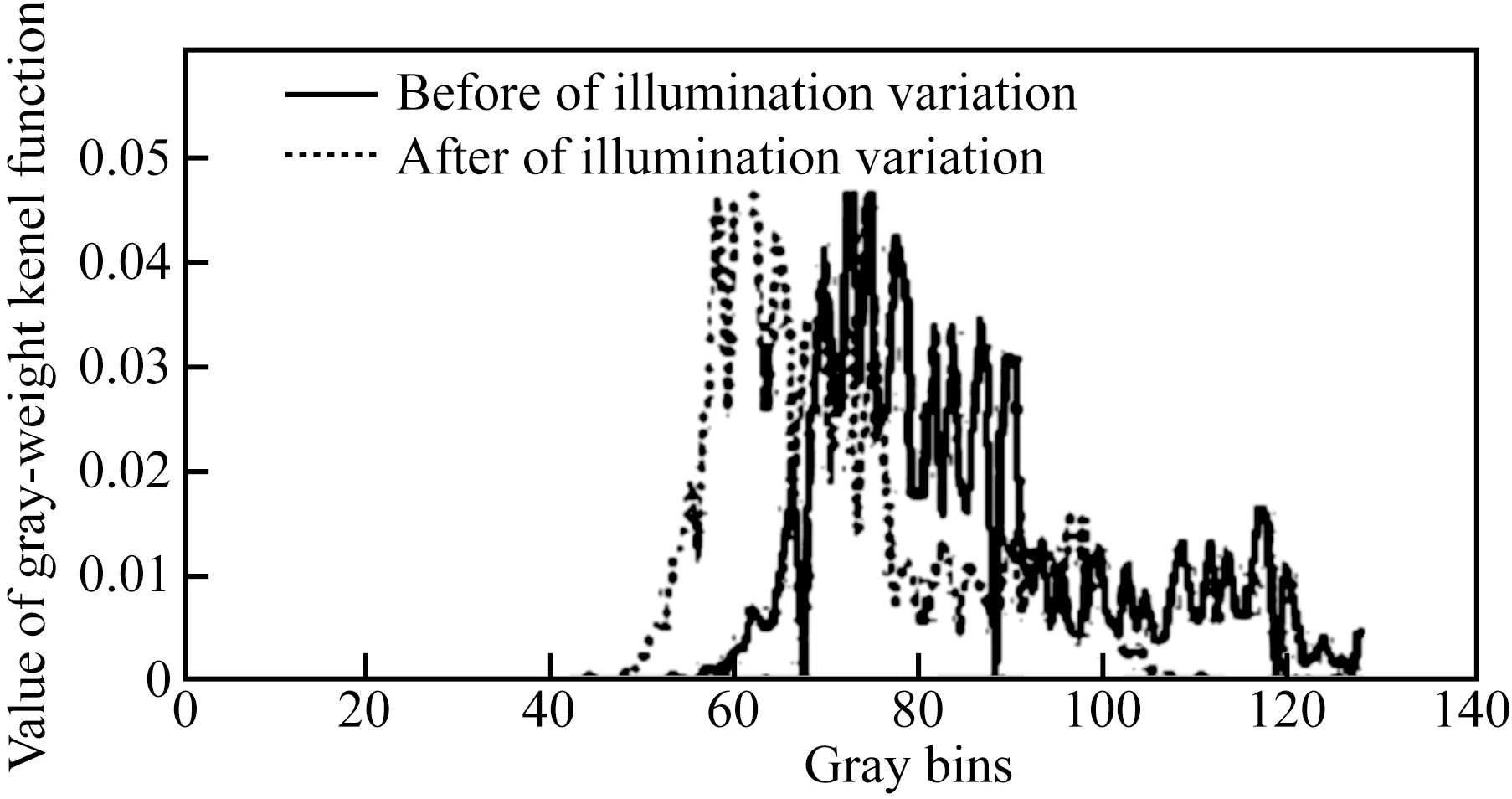
(e)两幅图像的核函数—灰度统计图对比
(a)第56帧图像块(a)The fifty-sixth frameimage block

(b)第76帧图像块(b)The seventy-sixthframe image block
为了验证本文方法的先进性,分别利用传统的帧间差分法和基于核函数—灰度统计图的相似度判别方法进行动基座动目标检测,对比结果如图4所示。

(a)第56帧图像

(b)全局运动补偿结果

(c)传统帧间差分法结果

(d)核函数-灰度统计图检测结果
根据实验对比图可见,传统的帧间差分法的实验结果中有大片的图像残留,不能有效消除背景噪声,匹配残留误差较大。基于核函数—灰度统计图的动基座动目标检测算法能有效地消除由光照变化、背景噪声造成的背景残留,可有效提高检测精度。
4 结 论
针对动基座下的运动目标检测中背景干扰较大,影响运动目标检测精度的问题,利用正交傅里叶变换和核函数—灰度统计图的方法完成了动基座下的运动目标检测。该方法在评价函数的评价系数α取0.7,帧间图像块相似度阈值T取0.3时,可以有效抑制视频图像运动背景中光照变化、背景噪声对运动目标检测带来的影响,达到了动基座下的运动目标检测要求。仿真实验结果表明该算法在视频图像背景干扰较大的情况下,能满足工程上对算法精度方面的要求,验证了该算法的可行性。
[1]赖作镁,王敬儒,张启衡. 背景运动补偿和假设检验的目标检测算法 [J]. 光学 精密工程,2007,15(1):112-116.LAI Z M, WANG J R, ZHANG Q H. Object detection algorithm based on background motion compensation and hypothesis test [J].Opt.PrecisionEng., 2007, 15(1): 112-116.(in Chinese)
[2]程帅,曹永刚,韩广良,等. 用基于二值化规范梯度的跟踪学习检测算法高效跟踪目标 [J]. 光学 精密工程,2015,23(8):2339-2348.
CHENG SH, CAO Y G, HAN G L,etal.. Efficient target tracking by TLD based on binary normed gradients [J].Opt.PrecisionEng., 2015, 23(8): 2339-2348.(in Chinese)
[3]聂海涛,龙科慧,马军,等. 采用改进尺度不变特征变换在多变背景下实现快速目标识别 [J]. 光学 精密工程,2015,23(8):2349-2356.
NIE H T, LONG K H, MA J,etal.. Fast object recognition under multiple varying background using improved SIFT method [J].Opt.PrecisionEng., 2015, 23(8): 2349-2356.(in Chinese)
[4]李静宇,刘艳滢,田睿,等. 视频监控系统中的概率模型单目标跟踪框架 [J]. 光学 精密工程,2015,23(7):2093-2099.
LI J Y,LIU Y Y, TIAN R,etal.. Probabilistic model single target tracking framework for video surveillance system [J].Opt.PrecisionEng., 2015, 23(7): 2093-2099.(in Chinese)
[5]王伟国,刘廷霞,李岩,等. 用于三轴转台的卫星跟踪策略 [J]. 光学 精密工程,2015,23(3):871-878.
WANG W G, LIU T X, LI Y,etal.. Secondary planet tracking tactic arithmetic for three-axis turntable [J].Opt.PrecisionEng., 2015, 23(3): 871-878.(in Chinese)
[6]程帅,孙俊喜,曹永刚,等. 增量深度学习目标跟踪 [J]. 光学 精密工程,2015,23(4):1161-1170.
CHENG SH, SUN J X, CAO Y G,etal.. Target tracking based on incremental deep learning [J].Opt.PrecisionEng., 2015, 23(4): 1161-1170.(in Chinese)
[7]宋策,张葆,尹传历. 适于机载环境对地目标跟踪的粒子滤波设计 [J]. 光学 精密工程,2014,22(4):1037-1047.
SONG C, ZHANG B, YIN CH L. Particle filter design for tracking ground targets in airborne environment [J].Opt.PrecisionEng., 2014, 22(4): 1037-1047.(in Chinese)
[8]MAES F, COLLIGNON A, VANDERMEULEN D,etal.. Multimodality image registration by maximization of mutual information [J].IEEETransactionsonMedicalImaging, (S0278-0062),1999,16(2):189-198.
[9]BARRON J,FLEET D,BEAUCHEMIN S. Performance of optical flow techniques [J].InternationalJournalofComputerVision,(S0920-5691),2011,12(1):42-77.
[10]KUGLIN C,HINES D. The phase correlation image alignment method[C].NewYork:IEEEConferenceonCyberneticsandSociety,2013.
[11]HUANG ZH W, QI F H, CEN F. Background Subtrac-tion and Frame Difference Based Moving Object Detection for Real-time Surveillance[J].JournalofDonghuaUniversity, 2013, 20(1): 15-19.
[12]LUO J. Application and implementation of moving estimate in image stabilation and matching [J].NationalUniversityofDefenseTechnology, 2007, 12(1):42-77.
[13]COLLINS R A. System for video surveillance and monitoring: VSAM final report.Carnegie mellon university technical report[R]. CMU-RI-TR-00-1 2, 2011.
[14]CHEUNG H K, SIU W C. Fast global motion estimation for sprite generation [C].IEEEInternationalSymposiumonCircuitsandSystems, 2012, 3: 26-29.
[15]RICHARD A, STEVEN M K, PETRE S. Estimation of the parameters of a bilinear model with applications to submarine detection and system identification [J].DigitalSignalProcessing, 2013, 17(4): 756-773.
[16]HSU Y N. Optical pattern recognition using harmonic expansion [J].ApplOpt, 2011,21:4016-4019.
[17]HA J E, LEE W H. Foreground objects detection using multiple difference images [J].OpticalEngineering,2010,49(4):047201.
[18]HU W M, TAN T N, WANG L,etal.. A survey on visual surveillance of object motion and behaviors [C].IEEETans.Syst.,Man,Cyben.,Appl.Rev., 2014,34(3):334-352.
[19]MADDALENA L, PETROSINO A. A self-Organizing approach to background subtraction for visual surveillance applications [C].IEEETrans.ImageProcess, 2008,17(7):1168-1177.
[20]ZHANG D. Motion detection for rapidly moving cameras in fully 3D scenes in Pacific-Rim Symposium on Image and Video [J].Technology(PSIVT), 2010: 444-449.
[21]YU X Q, CHEN X N, GAO M N. Motion detection in dynamic scenes based on fuzzy C-means clustering [C].InternationalConferenceonCommunicationSystemsandNetworkTechnologies, 2012:306-310.
[22]JIANG ZH, DING W R, LI H G. Aerial video image object detection and tracing based on motion vector compensation and statistic analysis [C]. 2007AsiaPacificConferenceonPostgraduateResearchinMicroelectronics&Electronics, 2009:302-305.
[23]YANG Y, ZHU H, FU M Y. Lane recognition self-learning scheme of mobile robot based on integrated perception system [J].IntelligentVehiclesSymposium(IV), 2013:78-81.
[24]YANG Y, FU M Y, XIN Y,etal.. Autonomous ground vehicle navigation method in complex environment [J].IntelligentVehiclesSymposium(IV), 2010:458-460.
[25]VAMBORG V, BROVKIN M C. The effect of a dynamic background albedo scheme on Sahel/Sahara precipitation during the mid-Holocene [J].ClimateofthePast,2011,7(1): 117-131.
[26]HUANG S C. An advanced motion detection algorithm with video quality analysis for video surveillance systems [C].IEEETrans.CircuitsSyst.VideoTechnol, 2011,21(1):1-14.
[27]DO B H,HUANG S C. Dynamic background modeling based on radial basis function neural networks for moving object detection [C].Proc.IEEEICME, 2011:1-4
陆牧(1989-),男,吉林长春人,博士研究生,2012年于吉林大学获得学士学位,主要从事图像处理、目标检测、目标跟踪等方面的研究。E-mail:980443913@qq.com
导师简介:

朱明(1964-),男,江西南昌人,研究员,博士生导师,主要从事图像处理,光电成像测量技术,电视跟踪和自动目标识别技术等方面的研究。E-mail:zhu_mingca@163.com
(版权所有未经许可不得转载)
Moving target detection under moving base
LU Mu*, GAO Yang, ZHU Ming
(LaboratoryofAviationImagingandMeasurementofOptical,ChangchunInstitute,FineMechanicsandPhysics,ChineseAcademyofSciences,Changchun130033,China)
*Correspondingauthor,E-mail:980443913@qq.com
Traditional moving target detection under a moving base has a problem of larger background interference, and its detection accuracy is effected by the noise interference. This paper proposes a moving target detection method under the moving base by using orthogonal Fourier transform and kernel-grayscale chart to overcome the influence of a larger illumination change and background noise on moving target detection accuracy. Firstly, the evaluation function was introduced the selection of a feature matching block to implement the sub-block matching of video backgrounds. Then, global motion compensation parameters were estimated by using a phase-correlation algorithm based on orthogonal Fourier transform, and each Gaussian kernel value of each sub-block of the image was calculated to build a nuclear function-gray chart and to determine the area of moving target according on the change of the adjacent frame Gaussian kernel value. Finally, the image sub-block with moving target was divided and processed, and the moving target detection was implemented. The simulation in comparison with conventional moving object detection algorithm shows that when the evaluation coefficient in the evaluation function is set to be 0.7, and inter tile similarity threshold to be 0.3, the algorithm can effectively inhibit the background interference from illumination changes and background noise and can detect the moving target under the moving base. The algorithm has fast calculation speeds and meets real-time requirements of engineering.
moving target detection; moving base; orthogonal Fourier transform; kernel-gray chart
2015-11-13;
2015-12-09.
吉林省科技发展计划青年科研基金项目(No.20150520057JH)
1004-924X(2016)07-1782-07
TP391.4
Adoi:10.3788/OPE.20162407.1782
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02 02:00:02
汽车工程师(2021年12期)2022-01-17 02:29:54
防爆电机(2021年2期)2021-06-09 08:14:48
高技术通讯(2021年3期)2021-06-09 06:57:48
当代陕西(2020年14期)2021-01-08 09:30:42
模具制造(2019年7期)2019-09-25 07:30:00
船舶标准化工程师(2019年4期)2019-07-24 07:21:16
自动化学报(2017年5期)2017-05-14 06:20:56
贵州师范学院学报(2016年4期)2016-12-01 03:54:07
光学精密工程(2016年1期)2016-11-07 09:01:59
