
空间遥感器大口径反射镜的复合支撑结构
2016-08-23 06:31王克军董吉洪张缓缓迟春燕赵伟国
光学精密工程 2016年7期
王克军,董吉洪,宣 明,张缓缓,迟春燕,赵伟国
(1.中国科学院 长春光学精密机械与物理研究所,吉林 长春 130033;2.中国科学院大学,北京 100049;3.吉林建筑大学,吉林 长春 130118)
空间遥感器大口径反射镜的复合支撑结构
王克军1,2*,董吉洪1,宣明1,张缓缓1,迟春燕3,赵伟国1
(1.中国科学院 长春光学精密机械与物理研究所,吉林 长春 130033;2.中国科学院大学,北京 100049;3.吉林建筑大学,吉林 长春 130118)
针对空间遥感器反射镜对支撑功能的需求,设计了一种应用于空间领域的大口径反射镜复合支撑结构。该复合支撑结构包括A框加切向拉杆的周边支撑和3组whiffletree结构组成的背部支撑。研究了复合支撑的支撑原理和工程实现。基于功能分配和指标分配的理念设计了复合支撑结构。采用有限元分析的手段对设计结果进行了静力学和动力学仿真验证,然后对实际的支撑系统进行了相关的试验测试。试验结果表明,采用复合支撑的反射镜组件在工作状态下的面形精度优于λ/50(λ=632.8nm),镜体刚体位移小于0.01mm,镜体转角小于2″,质量小于50kg。整个组件模态分布合理,基频为161Hz,远高于设计要求的120Hz。各项仿真和测试结果均表明该复合支撑效果良好,满足空间遥感器对可靠性和稳定性的需求。
空间遥感器;大口径反射镜;复合支撑;仿真分析;面形检测;力学试验
1 引 言
反射镜组件是空间遥感器中最关键的部件之一,其性能的优劣直接影响遥感器的成像质量。目前国内外大口径反射镜的支撑形式,主要可分为3大类:被动支撑方式、重力卸载方式和主动光学方式。被动支撑是一种传统的支撑方式,反射镜口径越大,被动支撑的结构越复杂,设计越困难,但是其可靠性高,性能稳定。主动光学是一种新兴的支撑技术,它可以通过实时调整促动力的大小校正主镜面形,保证系统成像质量,但是其可靠性不高,目前还没有真正用于航天领域。重力卸载可以说是一种半主动光学形式,在地面通过对主镜施加一定数量的重力卸载装置来模拟在轨环境,使其面形达到指标要求,在轨运行时重力卸载装置断开,重力消失,反射镜面形不变。重力卸载方式要求必须能在地面精准地模拟在轨环境,否则达不到预期效果,风险大[1-3]。主动光学和重力卸载方式主要用于1m以上口径的反射镜的支撑,对于1m以下口径的反射镜则多采用被动支撑形式。被动支撑又可细分为背部支撑、周边支撑和复合支撑形式。
本文旨在研究用于空间领域的口径为Φ700mm的反射镜的高可靠性和高稳定性支撑,本文通过深入研究复合支撑的工作原理及工程实现途径,采用功能分配、指标分配的手段完成了支撑结构的设计,并通过有限元仿真和试验验证的手段验证了反射镜组件的性能。
2 复合支撑的支撑原理
2.1反射镜支撑原则
对于反射式望远镜主光学系统而言,反射镜支撑的关键点有两个:一是确定反射镜的空间位置,保证主、次镜间的相对位置关系;二是保证镜面面形精度。因此,一方面需要将反射镜视为刚体,约束空间6个自由度;另一方面又需将反射镜视为弹性体,以保证镜体自身变形最小。
对于第一方面,根据机构运动学原理,首先要确定反射镜的空间位置,即约束反射镜的6个空间自由度,见图1,其支撑形式应为静定或超静定支撑。

图1 反射镜6个空间自由度
对于第二方面,保证反射镜面形精度的手段主要包括:提升反射镜自身结构刚度,如采用轻量化结构来提高等效结构刚度或采用高刚度材料(如SiC)等;增加支撑点数,因为相同刚度的镜体,支撑点数越多,镜体弯曲变形越小。本文通过实验分析了不同支撑点数下的反射镜面的变形量。由图2可知,反射镜面的变形量与支撑点间距d的4次方成正比,与材料的弹性模量和惯性矩成反比[4]。

图2 等间距支撑平板变形趋势
2.2复合支撑工作原理
为了保证镜体的空间位置和镜体的面形精度,复合支撑结构的工作原理必须满足反射镜的支撑原则。
针对功能需求,复合支撑采用周边支撑和背部支撑相结合的支撑结构。前期镜体设计时已确定背部支撑点数为6点,周边支撑点数也为6点。背部支撑采用3组Whiffletree结构,周边支撑采用3组“A框+切向拉杆”结构。
Whiffletree结构是一种根据“三点定一平面”原则发展而来的无定向板支撑系统[5-6]。其原理图见图3。
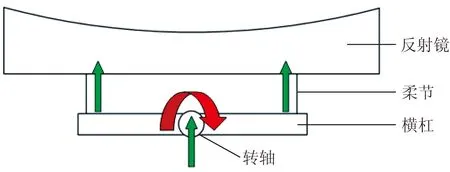
图3 Whiffletree结构原理图
Whiffletree结构特点:
(1)采用杠杆平衡原理分散支撑力,增加支撑点数,减小支撑跨距。
(2)使支撑力处于平衡状态,从而消除支撑带给反射镜的弯矩。
(3)柔性环节消除了温度变化时由于各个零部件线胀系数不一致带来的热应力。
(4)Whiffletree结构中的柔性环节可消除过约束,实现静定支撑,装配工艺性好。
背部采用3组Whiffletree结构可将背部支撑点数由3点变为6点。每组Whiffletree结构由两个柔节、一个横杠、一个转轴组成。柔节可约束一个沿杆轴向移动自由度。转轴释放一个转动自由度。横杠是转轴和柔节的连接环节,是一个高刚度结构件。两个柔节各约束一个移动自由度,结合实际支撑情况,其效果等价于约束一个移动自由度和一个转动自由度,再通过转轴将约束的转动自由度释放掉,最终一个Whiffletree结构仅约束一个移动自由度。3组Whiffletree约束3个移动自由度,等价于约束一个移动自由度和两个转动自由度:Tx,Ry,Rz。
A框+切向拉杆结构是国内外大口径反射镜所普遍采用的一种周边支撑方式,其原理图如图4所示。

图4 A框+切向拉杆结构原理图
A框+切向拉杆的结构特点:
(1)这种结构可分散支撑力,增加支撑点数,减小支撑跨距,降低支撑点处的局部应力;
(2)A框在支腿端部有柔节,可降低装配应力,削弱热膨胀时产生的热应力;与背部支撑约束的3个自由度解耦;
(3)切向拉杆在反射镜径向的柔性大,因此可降低装配应力,削弱热膨胀时产生的热应力。
周边支撑可以简化为平面机构,去掉虚约束,见图4,采用平面机构自由度计算公式计算其自由度,z=3×(n-1)-2pL=3×(11-1)-2×15=0,恰好可约束3个平面自由度:Rx,Ty,Tz。无过约束,也无欠约束。
综上可知,通过周边支撑的A框,背部支撑的Whiffletree结构增加了对镜体的支撑点数,再通过轻量化镜体结构提升了镜体的等效刚度,保证了镜体面形。
周边支撑和背部支撑共同约束反射镜的6个空间自由度,两者独立作用,互不耦合,无过约束,对反射镜实现静定支撑。如图5和表1所示。

图5 反射镜空间自由度分配
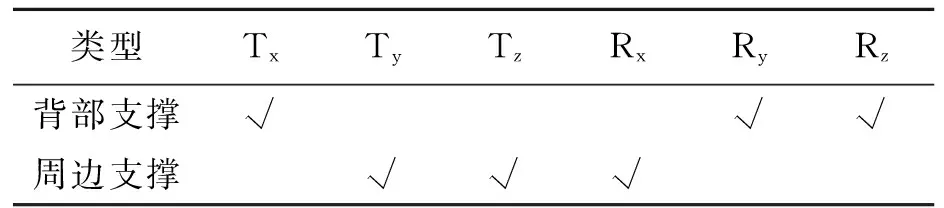
(mm)
3 支撑方案设计
3.1指标分析
反射镜组件的设计时要综合考虑镜面面形精度、刚体位移、倾角、质量、动力学性能。各项指标具体要求如下:
(1)在综合因素影响作用下,反射镜镜组件的镜面面形RMS值要优于λ/50(λ=632.8nm);
(2)在重力载荷作用下,反射镜在重力方向的位移量要优于0.01mm;
(3)在重力载荷作用下,反射镜在重力方向的倾角要优于2″;
(4)反射镜组件的一阶基频要优于120Hz;
(5)反射镜组件质量要小于50kg。
面形值:与镜体刚度、支撑点个数以及合理的支撑结构有关。
刚体位移:与支撑结构的刚度有关,支撑结构刚度小,则刚体位移大,支撑结构刚度过大,则组件的抗热载荷能力变差,需折中设计。
倾角:与支撑结构的支撑位置有关,复合支撑中的支撑点均通过反射镜重心,以限制反射镜产生过大倾角。
动力学性能:与各个结构件的刚度有关,在保证热载荷与重力载荷下反射镜面形值的前提下,增加组件内各个零部件的刚度,可使组件获得高刚度。
质量:对空间遥感器来说,质量与发射成本成正比,在保证组件性能的情况下,限制组件质量。
3.2功能分配
复合支撑采用了周边支撑和背部支撑共同支撑的结构形式。为保证反射镜的支撑效果,两者均需具备相应的支撑功能。
为使背部Whiffletree支撑结构实现约束3个空间自由度、增加支撑点数和消除热应力的功能,对其各个零件的功能进行分配。
柔节:约束反射镜轴向自由度,完全释放其它方向的自由度,对柔节的设计目标是轴向刚度高,径向刚度低。
横杠:将支撑点由一点分为两点,设计目标是刚度越高越好,以保证其沿反射镜轴向的刚体位移小。
转轴:单自由度柔节,其功能之一是释放两个柔节引入的过约束,使背部支撑满足“三点定一平面”原则;其二是消除由于镜室局部变形和Whiffletree组件内各个零件的加工误差引入的扭矩,保证反射镜面形值满足设计要求,因此它的设计目标是扭转刚度要满足其释放转动自由度功能,同时沿反射镜轴向的刚度要高,避免引入过大的轴向刚体位移。
为使周边支撑结构实现约束3个空间自由度、增加支撑点数和消除热应力的功能,对其各个零件的功能进行分配。
A型框:消除反射镜的热膨胀应力;限制反射镜垂直光轴方向的刚体位移;增加支撑点数,分散支撑力;释放背部支撑约束的3个自由度,避免形成过约束。
切向拉杆:限制反射镜垂直光轴方向刚体位移;消除反射镜和A框的热膨胀应力(主要是A框)。
3.3指标分配
为满足反射镜组件的指标要求,对引起反射镜组件面形误差RMS变化的原因进行了归纳,并对各部分进行了面形误差分配[7];对反射镜组件的各个零部件的质量进行了分配;对支撑结构各个零部件产生的刚体位移进行了分配。
另外本文没有对两项指标—倾角和基频进行详细的分配。这是因为周边支撑与背部支撑相结合的支撑形式不会产生较大倾角,周边支撑作用在质心面上,而背部6点支撑对反射镜可实现均匀支撑,都不存在倾覆力矩,理论倾角为零。对于反射镜组件来说,组件基频主要取决于支撑结构的比刚度,结构设计时要在保证满足其它性能指标要求的前提下使每个结构件都有一个较高的比刚度,设计完成后,进行动力学仿真计算基频,如不满足要求,则对模型关键结构进行迭代设计。
通过研究确定,影响反射镜面形误差的因素主要有6个方面:单镜加工残余面形误差、重力引入的面形误差、温度变化引入的面形误差、支撑装配引入的面形误差、镜室安装引入的面形误差和余量。上述误差产生的原因各不相同,可以近似认为互不相关,满足随机误差和系统误差的误差合成公式:

(1)
其中:σi为随机误差,Sj为单项未定系统误差。
单镜加工残余面形误差由光学加工保证;重力引入的面形误差和温度变化引入的面形误差取决于反射镜组件的设计优劣,由机械设计保证;支撑装配引入的面形误差取决于零件的加工精度和装配工艺,由加工和装调阶段保证;镜室安装面引入的面形误差取决于安装面的精度和刚度,由支撑反射镜组件的结构刚度和安装面的加工保证。
反射镜组件光轴水平检测、装调,光轴竖直状态加工,两个状态的规定面形精度均优于λ/50。
根据当前光学反射镜的面形加工能力、机械零部件的加工能力,对反射镜组件的总面形误差λ/50(12.66nm)进行了分配,确定了各项误差的量级大小,详见图6。在设计时保证每个环节引入的面形误差值均优于分配值,最终的总面形误差值才能优于λ/50。
反射镜组件的装调、检测是在光轴水平状态完成的。根据指标需求,光轴水平时,镜面沿重力方向的刚体位移小于0.01mm。同时,为保证整个组件的动力学性能,其轴向支撑刚度不能太弱,规定在光轴竖直时,镜面沿重力方向的刚体位移设计值要小于0.01mm。
由于支撑结构各个零件产生的刚体位移都是沿重力载荷方向,总刚体位移可采用代数和法将各个环节的位移进行合成或分解,公式如下:

(2)
其中:Δi是各个零件沿载荷方向产生的刚体位移。根据反射镜组件的总刚体位移大小,对各个零件在重力载荷下产生的刚体位移的最大值进行了限制,详见图7。设计零件时,保证其在承受载荷下产生的刚体位移要小于相应的分配值,总刚体位移小于0.01mm,满足指标需求。
为保证空间遥感器的发射成本,对反射镜组件的质量有严格限制,不得大于50kg,因此,对反射镜组件的各个组件的质量进行了分配,每个部组件在设计时不得超过相应的分配量,总质量可采用代数和法将各个环节的质量进行合成或分解,公式:
(3)
其中:mi是各个部、组件的质量。各个部、组件质量分配详见图8。

图6 反射镜组件总面形误差分配

图7 反射镜组件刚体位移分配

图8 反射镜组件质量分配
3.4结构设计
通过分析支撑原理和指标要求,进行功能分配和指标分配,明确了反射镜组件的设计目标和设计约束。综合考虑反射镜组件的功能需求、质量限制和空间尺寸限制,根据复合支撑原理完成了背部6点Whiffletree结构+周边3组A框加切向拉杆的复合支撑结构的设计[8-15],详细方案见图9。
反射镜组件由反射镜、周边支撑结构、背部支撑结构和镜室组成。其中反射镜材料选择应用广泛的SiC,其具有比刚度大、尺寸稳定、高轻量化率、可获得高精度镜面的优点。

图9 反射镜组件结构组成
3.4.1背部支撑结构设计
根据支撑结构的支撑原理和指标分析,结合背部支撑的功能分配和指标分配,开展背部支撑结构设计。单组Whiffletree结构由背部殷钢件、柔节、横杠、转轴和背部修研垫组成,见图10。其中:背部殷钢件是横杠组件与反射镜的一个过渡连接件,它一端通过环氧树脂胶与反射镜粘接,另一端通过螺钉与柔节连接,殷钢材料,热胀系数可调,避免存在热载荷时镜体与其产生较大的热应力;柔节是柔性结构件,其主结构是一个空心圆柱,在圆柱的两端开垂直布置的切槽,其在轴向的刚度高,可以约束轴向移动自由度,在六分之一镜重的载荷作用下,轴向压缩量小于指标分配值。其它方向刚度低,释放了其余5个自由度。柔节及径向变形趋势详见图11。柔节采用性能稳定的钛合金材料。柔节要消除温度变化时镜体和背部支撑及镜室结构材料由于热胀系数不一致带来的热应力,如图11所示,即通过柔节沿径向的变形量来消除镜体和背部支撑及镜室沿镜体径向的变形量的差值,从而消除热应力;横杠为高刚度结构件,其一端与柔节连接,另一端与转轴连接,由1点变为2点。在三分之一镜重载荷的作用下,在主镜光轴方向的变形量要小于指标分配值。横杠采用高体分SiC/AL复合材料,这种材料弹性模量高、导热率高、密度小、线胀系数略低于钛合金,是一种新型的航天应用材料;转轴为单自由度柔节,它的关键结构是两片垂直相交的薄板。对于单片薄板来说,垂直于薄板宽度方向的刚度小,平行于薄板宽度和长度方向的刚度大,两个薄片垂直布置,变形趋势见图12。其可释放转动自由度,约束其它5个自由度。在三分之一镜重载荷的作用下,主镜光轴方向的变形量小于指标分配值,其采用性能稳定的钛合金材料;背部修研垫为装配时的调整结构,采用钛合金材料。
迭代设计完成的背部支撑组件质量为4.4kg。

图10 Whiffletree结构组成

图11 柔节及径向变形图

图12 转轴及绕轴向变形图
3.4.2周边支撑结构设计
根据支撑结构的支撑原理和指标分析,结合周边支撑的功能分配和指标分配,开展周边支撑的结构设计。周边支撑的位置布局见图13。单组周边支撑由周边殷钢件、A框、切向拉杆和周边修研垫组成,见图14。

图13 周边支撑位置布局
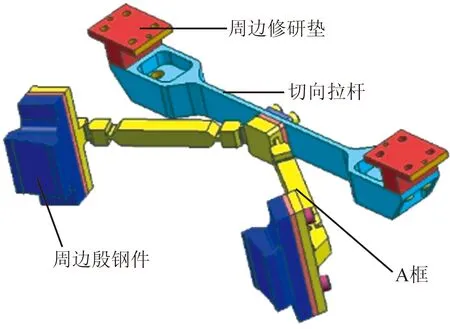
图14 A框+切向拉杆结构组成
周边殷钢件是周边支撑与反射镜的一个过渡连接件,它一端通过环氧树脂胶与反射镜粘接,另一端通过螺钉与柔节连接。与背部殷钢件一样采用殷钢。
A框结构形式见图15,在A框每个支腿的两端各设计两个柔槽:径向柔槽和轴向柔槽。径向柔槽用来替代图4原理图中的铰链,配合拉杆约束平面机构的3个自由度。轴向柔槽使A框沿垂直轴向柔槽的方向(即反射镜光轴方向)刚度小,释放背部支撑约束的3个空间自由度,与背部支撑解耦。A框采用性能稳定的钛合金材料。
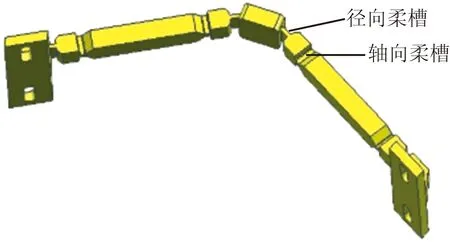
图15 A框
径向柔槽可释放由于镜体材料和周边支撑及镜室材料热特性不一致带来的沿镜体径向的热应力;轴向柔槽可释放由于镜体材料和背部支撑及镜室材料热特性不一致带来的沿光轴方向的热应力。
图13所示的A框在反射镜组件中的布局,2、3#A框起主要支撑作用,并限制反射镜重力作用下刚体位移,使其小于设计值。其在温度载荷和重力载荷共同作用下的变形趋势见图16。
切向拉杆:弹性薄片,沿厚度方向刚度小,沿长度方向和宽度方向刚度大,类似图4原理图中的二力杆,配合A框约束平面机构的3个自由度。光轴呈水平状态时,图13中的2、3#拉杆起主要支撑作用,限制反射镜在重力作用下的刚体位移,使其小于设计值;消除反射镜和A框的热膨胀应力(主要是A框)。其在温度载荷和重力载荷共同作用下的变形趋势见图16。切向拉杆采用强度、弹性等综合力学性能优良的65Mn。

(a)1#组件的变形趋势

(b)2、3#组件的变形趋势
周边修研垫:反射镜组件装配时的调整结构,采用钛合金材料。
迭代设计完成的周边支撑组件质量为2.3kg。
3.4.3镜室结构设计
镜室是背部支撑和周边支撑的安装基准,相对周边支撑和背部支撑来说,是一个高刚度的结构件,起到抵抗外部部分变形的作用,减轻柔性环节消除外界扰动变形的负担。以高比刚度为设计目标,同时考虑镜室的加工周期和加工成本,展开对镜室的设计,整个镜室可分为后盖板和支腿两部分。在满足使用要求的前提下,结构力求简单,易于加工与装配。见图17。镜室在组件光轴水平状态和光轴竖直状态时,在组件重力载荷作用下,镜室的变形量要小于刚体位移指标分配值。
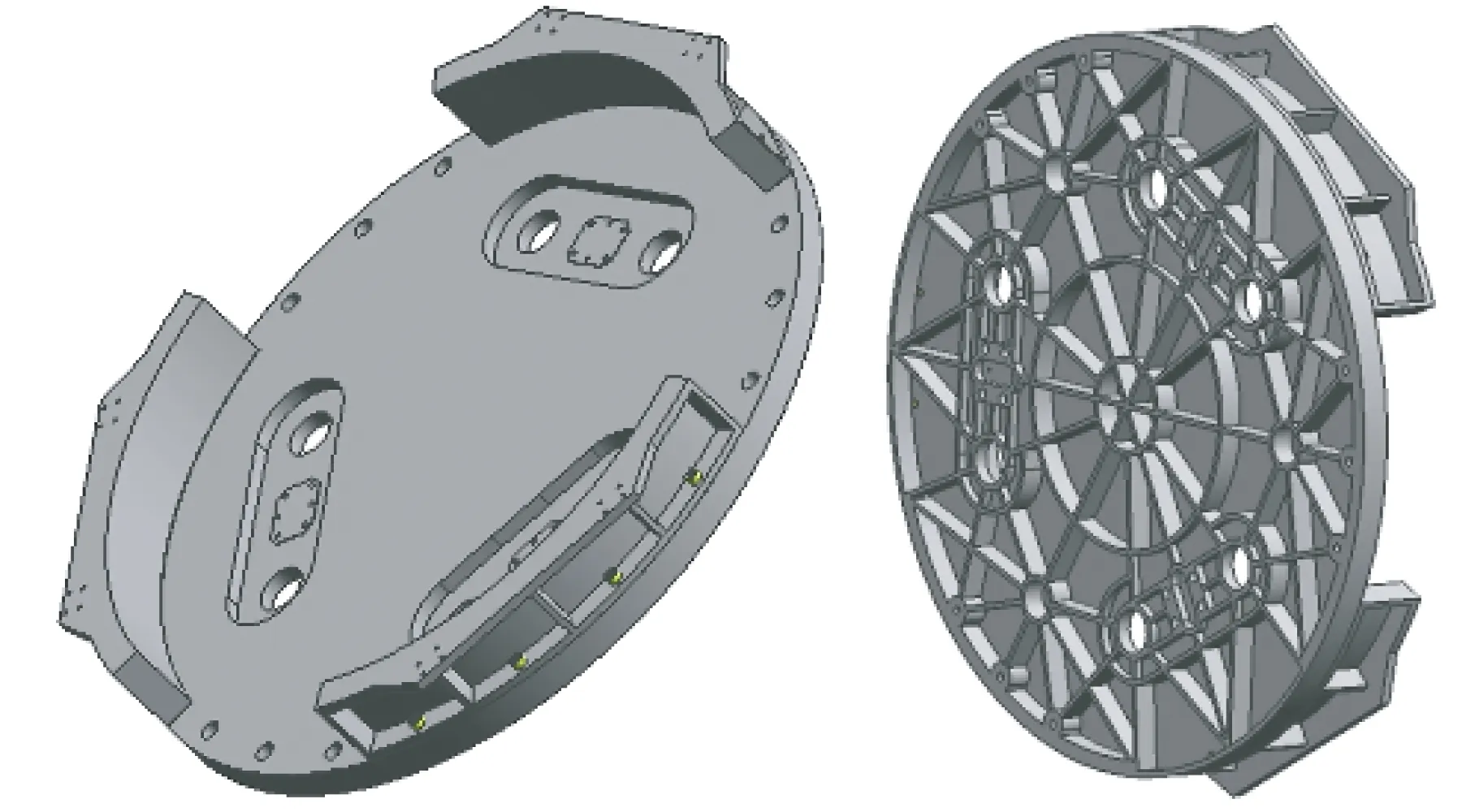
图17 镜室
镜室采用高比刚度的高体分SiC/AL复合材料。迭代设计完成后,镜室质量为17kg。则整个组件的几何模型估算质量为48.7kg,小于50kg。
4 工程分析
根据反射镜组件的各项指标需求,对反射镜组件进行了力、热耦合静力学仿真和动力学仿真[16-17]。反射镜组件的有限元模型见图18。
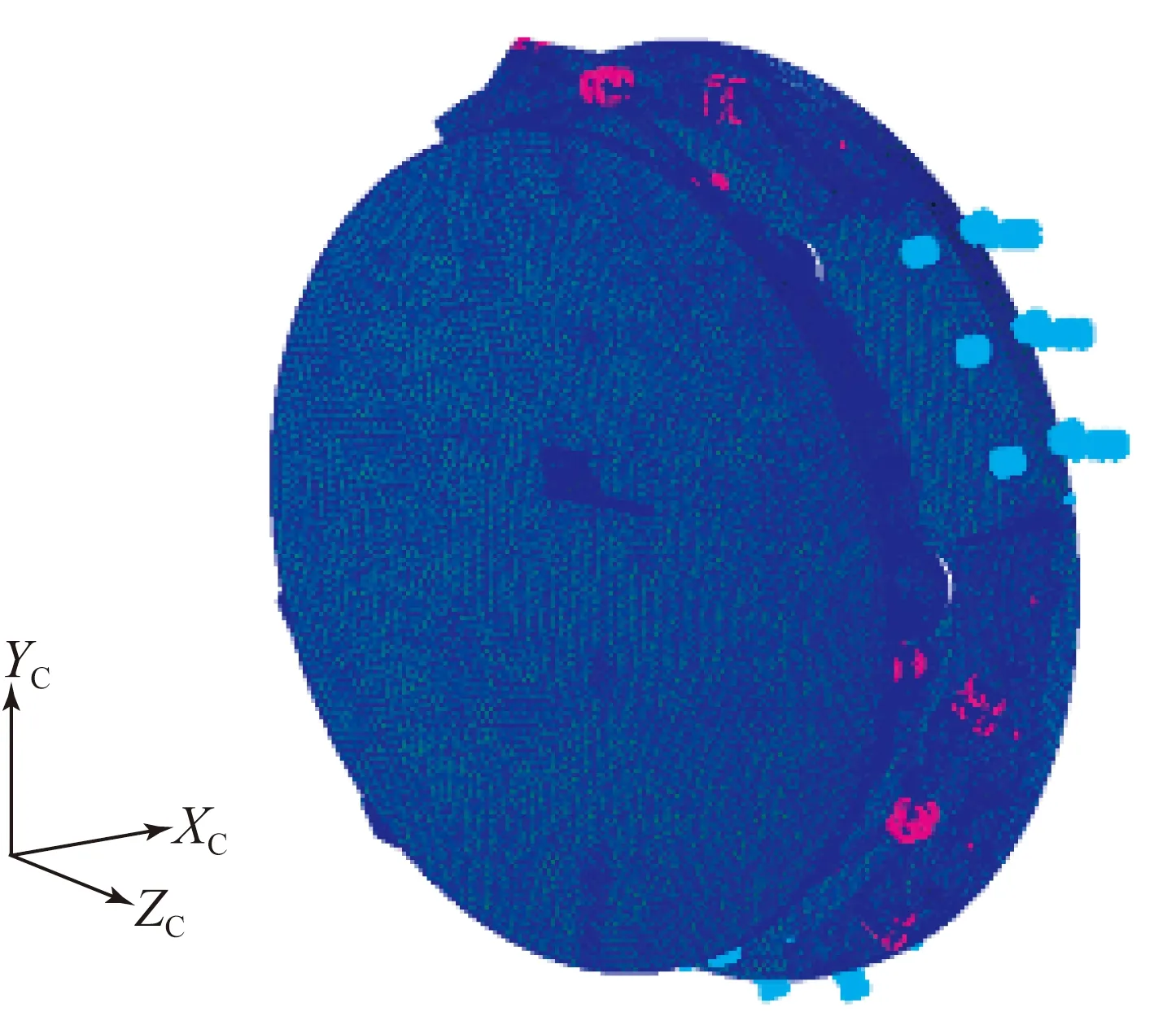
图18 反射镜组件有限元模型
4.1力、热耦合静力学分析
为验证整个结构组件的静力学特性,分别对X(光轴竖直)、Y(光轴水平)两个方向施加1g和25 ℃(室温20 ℃)温升的力及热耦合载荷[10],分析整个反射镜组件在各工况下的面型精度、刚体位移和倾角变化。X、Y向施加1g重力和5 ℃温升力、热耦合载荷时的组件位移云图如图19、20所示。

图19 Y向1 g重力与5 ℃温升耦合载荷位移云图
Fig.19Displacementcloudchartof1gravitinYdirectionwithtemperatureriseof5 ℃
图20 X向1 g重力与5 ℃温升耦合载荷位移云图
Fig.20Displacementcloudchartof1gravitinXdirectionwithtemperatureriseof5℃
采用后处理分析软件计算得到镜面的面形、刚体位移和倾角,计算结果见表2。根据总面形误差分配表,重力载荷和温升载荷产生的面形误差分别小于λ/97和λ/127,通过误差合成,两者共同影响时的面形误差要小于λ/77(8.2nm)。而设计结果为λ/84(7.5nm)和λ/90(7nm),满足设计指标。刚体位移为0.009mm和0.007mm,小于指标要求的0.01mm。倾角为0″和0.5″,小于指标要求的2″。

表2 反射镜组件各工况分析结果
4.2动力学分析
反射镜组件的模态振型反应了整个组件的动态刚度特性,为防止结构在运载以及发射过程中遭受冲击、振动、过载而被破坏,组件需要具有一定的刚度,避开恶劣环境中的外部激励以防止产生共振。对反射镜组件进行了模态分析和Y向10~2 000Hz的0.2g扫频分析。
结果表明反射镜组件的一阶固有频率是165Hz,大于设计要求的120Hz,表明该结构组件具有足够高的动态刚度。第一阶固有振型如图21所示。第一阶固有振型是沿X轴上下振动且有摆动趋势。0.2g扫频分析曲线见图22。
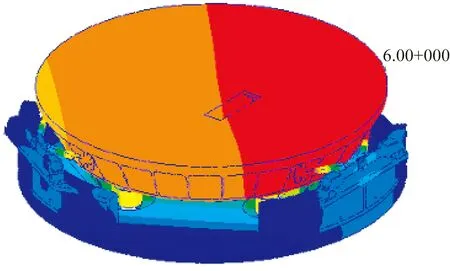
图21 一阶固有振型
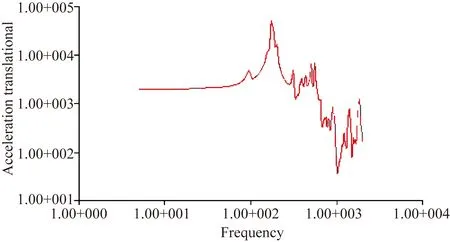
图22 Y方向0.2 g扫频分析曲线
5 实验验证
镜坯改性前以单镜状态进行加工,改性后安装支撑结构,以组件形式继续加工至要求面形。将设计完成的支撑零、部件按照公差要求进行加工,采用合理的装配工艺完成装配,确保支撑结构装调引入的面形误差在分配指标范围内。装配完毕、面形加工完成后开展相应的环境模拟试验和测试试验。图23为反射镜组件实物。组件质量为49.2kg。
5.1面形检测
针对反射镜组件的面形精度指标需求,对反射镜组件用ZYGO干涉仪进行了面形检测,验证面形精度能否满足设计要求。室温20℃下反射镜的面形值为0.018λ,绕光轴180 ℃翻转后面形值为0.019λ。室温25 ℃下反射镜的面形为0.019λ,绕光轴180 ℃翻转后面形值为0.019λ。
力学环境试验前后面形值基本无变化。
图24为面形检测搭建的试验环境。图25为室温25 ℃下反射镜的面形检测干涉图。图26为室温25 ℃下反射镜翻转180 ℃后的面形检测干涉图。

图25 25 ℃时的ZYGO检测干涉图
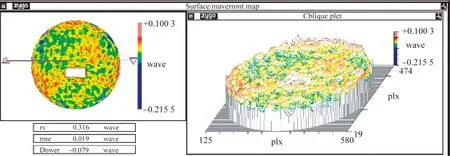
图26 25 ℃时反射镜翻转180 ℃后的ZYGO检测干涉图
5.2刚体位移、倾角检测
针对反射镜组件的刚体位移和倾角指标需求,采用莱卡经纬仪和千分表分别对镜体的刚体位移量和倾角进行了检测,刚体位移检测环境见图27,倾角检测结果见图28。将测试结果进行数据处理,得到1g重力下的镜体位移量为0.008mm,倾角为0.9″,满足设计指标。

图27 刚体位移检测

图28 倾角检测

图29 力学振动试验

图30 Y方向0.2 g扫频实验曲线
5.3力学试验
为验证反射镜组件的动力学特性,对反射镜组件进行了力学振动试验,对Y方向进行大小为0.2g的力学特性扫频实验,测定整个组件在10~2 000Hz频率范围内的响应频率,图29所示为力学振动试验环境,图30为0.2g力学特性扫频试验曲线,由试验可得反射镜组件的基频是161Hz,与力学仿真结果基本一致,远大于设计需求的120Hz,满足使用需求。
6 结 论
本文根据空间遥感器面形精度高、稳定性高的要求,提出了复合支撑的支撑方式,并研究了反射镜支撑及复合支撑的原理,采用指标分配和功能分配的方法,完成了大口径反射镜复合支撑的结构设计。针对反射镜的各项指标,采用有限元方法进行了仿真,有效地指导了结构设计。最后,针对反射镜组件的各项指标需求开展了相应的环境试验,试验结果与仿真结果基本一致。反射镜组件的面形精度为λ/53,优于λ/50。刚体位移是0.008mm,小于指标需求的0.01mm。倾角是0.9″,小于指标需求的2″,总质量为49.2kg,小于指标需求的50kg。基频161Hz,大于设计需求的120Hz。
基于复合支撑原理的空间遥感器大口径反射镜复合支撑结构满足使用需求。指标分配和功能分配的设计方法也可以应用于同类结构设计。
[1]曾勇强,傅丹鹰,孙纪文,等.空间遥感器大口径反射镜支撑结构形式概述[J].航天返回与遥感,2006,27(2):18-22.
ZENGYQ,FUDY,SUNJW, et al..Summaryofsupportstructurepatternsoflargemirrorforspaceremotesensor[J]. Spacecraft Recovery and Romote,2006,27(2):18-22.(inChinese)
[2]JIAOSJ,CUISC.AchievementandprospectofsatelliteremotesensingtechnologyinChina[J]. Proceedings of SPIE(S0277-786X),1998,3505:26-30.
[3]关英俊,辛宏伟,李志来,等.大口径空间反射镜组件结构设计与分析[J].激光与红外,2014,44(7):777-782.
GUANYJ,XINHW,LIZHL, et al..Structuredesignandanalysisoflargeaperturemirrorsubassembly[J]. Laser & Infrared,2014,44(7):777-782.(inchinese)
[4]范磊.2m口径地基望远镜SiC主镜轻量化设计及支撑技术研究[D].长春:中国科学院大学,2013.
FANL. Research on the lightweight design and support of 2 m-SiC primary mirror for ground-based telescope [D].Changchun:UniversityofChineseAcademyofSciences,2013.(inchinese)
[5]张丽敏,王富国,安其昌,等.Bipod柔性结构在小型反射镜支撑中的应用 [J].光学 精密工程,2015,23(2):438-443.
ZHANGLM,WANGFG,ANQCH,et al..ApplicationofBipodtosupportingstructureofminitypereflector[J]. Opt. Precision Eng.,2015,23(2):438-443.(inChinese)
[6]邵亮,吴小霞,陈宝刚,等.SiC轻量化主镜的被动支撑系统[J].光学 精密工程,2015,23(5):1381-1386.
SHAOL,WUXX,CHENBG,et al..Passivesupportsystemoflight-weighedSiCprimarymirror[J]. Opt. Precision Eng.,2015,23(5):1381-1386.(inChinese)
[7]杨飞,刘国军,安其昌.基于结构函数的大口径望远镜光机系统误差分配[J].光学 精密工程,2015,23(1):119-121.
YANGF,LIUGJ,ANQCH.Errorallocationofopto-mechanicalsystemforlargeaperturetelescopebasedonstructurefunction[J]. Opt. Precision Eng.,2015,23(1):119-121.(inChinese)
[8]龙波,邢廷文,廖胜.铝镜消应力支撑及SPDT辅助装配设计[J].光电工程,2014,41(3):1-6.
LONGB,XINGTW,LIAOSH.Designofstress-reliefsupportofaluminummirrorsandassemblyassistedbySPDT[J].Opto-Electronic Engineering,2014,41(3): 1-6.(inChinese)
[9]范磊,张景旭,邵亮,等.采用液压Whiffle-tree的大口径主镜轴向支撑[J].红外与激光工程,2013,42(8):2126-2131.
FANL,ZHANGJX,SHAOL, et al..AxialsupportforlargeapertureprimarymirrorbasedonhydraulicWhiffle-tree[J]. Infrared and Laser Engineering, 2013,42(8):2126-2131.(inChinese)
[10]王忠素,翟岩,梅贵,等.空间光学遥感器反射镜柔性支撑的设计[J].光学 精密工程,2010,18(8):1833-1841.
WANGZHS,ZHAIY,MEIG, et al..Designofflexiblesupportstructureofreflectorinspaceremotesensor[J].Opt. Precision Eng.,2010, 18(8):1833-1841.(inChinese)
[11]辛宏伟,关英俊,李景林,等.大孔径长条反射镜支撑结构的设计[J].光学 精密工程,2011,19(7):1560-1568.XINHW,GUANYJ,LIJL, et al..Designofsupportforlargeaperturerectangularmirror[J]. Opt. Precision Eng.,2011,19(7):1560-1568.(inChinese)
[12]周子云,高云国,邵帅,等.采用柔性铰链的快速反射镜设计 [J].光学 精密工程,2014,22(6):1547-1554.
ZHOUZY,GAOYG,SHAOSH, et al..Designoffaststeeringmirrorusingflexiblehinge[J]. Opt. Precision Eng.,2014,22(6):1547-1554.(inChinese)
[13]刘福贺,程志峰,石磊,等.长条形反射镜支撑结构设计与分析[J].红外与激光工程,2015,44(5):1512-1517.
LIUFH,CHENGZHF,SHIL, et al..Designandanalysisofsupportingstructureforrectangularmirror[J]. Infrared and Laser Engineering, 2015,44(5):1512-1517.(inChinese)
[14]李畅,何欣.大口径反射镜轻量化及其支撑结构设计[J].激光技术,2015,39(3):337-340.
LICH,HEX.Designoflightweightoflargeaperturemirrorsandsupportingstructures[J]. Laser Technology, 2015,39(3):337-340.(inChinese)
[15]薛军,扈海滨,宋汉忠.光学反射镜挠性支撑结构研究[J].长春工业大学学报:自然科学版,2009,30(4):457-461.
XUEJ,HUHB,SONGHZH.Researchontheflexiblesupportingstructureoftheopticalreflector[J]. Journal of Chang chun University of Techonology(Natural Science Edition),2009,30(4):457-461.(inChinese)
[16]吴清文,杨洪波,杨近松,等.空间相机中反射镜及其支撑方案设计与分析方法[J].光学技术,2004,30(2):152-156.
WUQW,YANGHB,YANGJS, et al..Designandanalysisforprimarymirroranditssupportofspacecamera[J].Optical Technique,2004,30(2):152-156.(inChinese)
[17]王克军,董吉洪,李威,等.空间遥感器整机有限元分析[J].光机电信息,2010,27(12):81-87.
WANGKJ,DONGJH,LIW, et al..Finiteelementanalysisofoverallstructureofspacecamera[J].OME Information, 2010,27(12):81-87.(inChinese)

王克军(1982-),男,山东乐陵人,硕士,助理研究员,2006年、2008年于吉林大学分别获得学士、硕士学位,现主要从事空间遥感器光机结构设计。E-mail:wangkejun1@163.com
(版权所有未经许可不得转载)
Compound support structure for large aperture mirror of space remote sensor
WANG Ke-jun1,2*, DONG Ji-hong1, XUAN Ming1, ZHANG Huan-huan1, CHI Chun-yan3, ZHAO Wei-guo1
(1.Changchun Institute of Optics,Fine Mechanics and Physics,Chinese Academy of Sciences,Changchun 130033, China;2.University of Chinese Academy of Sciences,Beijing 100049,China;3.Jilin Jianzhu University,Changchun 130118, China)
*Corresponding author, E-mail:wangkejun1@163.com
Forrequirementsofthemirrorinaspaceremotesensorforsupportfunction,acompoundsupportstructureusedinthemirrorwithalargeapertureinthespacefieldwasdesigned.ThecompoundsupportstructureincludesaperipheralsupportcomposedofanAframeandatangentialpullrodandabacksupportcomposedofthreegroupsofwhiffletreestructures.Thesupportprincipleandengineeringrealizationofthecompoundsupportstructurewereresearched.Then,thedesignideaoffunctionallocationandindexallocationwasusedtodesignthecompoundsupportstructure.Thestaticsanddynamicssimulationswerecarriedoutonthedesignresultbythefiniteelementanalysis,andtherelativetestwasperformedontheactualmirrorsupportcomponent.Experimentalresultsshowthatthesurfaceshapeerrorofthemirrorwiththecompoundsupportstructureisbetterthanλ/50(λ=632.8nm),therigidbodydisplacementofmirrorandthedipanglearesmallerthan0.01mmand2″respectively,andthemassofmirrorcomponentislessthan50kg.Furthermore,thecomponenthasareasonablemodaldistribution,andthefundamentalfrequencyis161Hz,higherthantherequirementof120Hz.Thesimulationandtestresultsdemonstratethatthecompoundsupportstructurehasgoodsupporteffects,whichmeetsthedemandofspaceremotesensorsforhighreliabilityandhighstability.
spaceremotesensor;largeaperturemirror;compoundsupport;simulationanalysis;surfaceshapeerrortest;mechanicaltest
2015-08-03;
2015-09-09.
国家自然科学基金资助项目(No.41175208)
1004-924X(2016)07-1719-12
TH751
Adoi:10.3788/OPE.20162407.1719
猜你喜欢
新能源科技(2022年9期)2022-11-20
航天返回与遥感(2022年3期)2022-07-07
科技信息·学术版(2021年8期)2021-01-10
高师理科学刊(2020年2期)2020-11-26
四川工商学院学术新视野(2020年2期)2020-08-13
环境技术(2020年1期)2020-03-06
航天返回与遥感(2018年2期)2018-05-17
北京航空航天大学学报(2017年1期)2017-11-24
光学精密工程(2016年6期)2016-11-07
光学精密工程(2016年1期)2016-11-07
