
基于Simulink的CVT电动汽车整车建模与仿真
2016-08-20 08:36李骏聂昕于祥珍
汽车工程师 2016年10期
李骏 聂昕 于祥珍
(1.东风柳州汽车有限公司;2.湖南大学汽车车身先进设计制造国家重点实验室)

环境污染与资源短缺是汽车行业面临的最大问题,新能源汽车可解决这一问题。无级变速器(CVT)可拥有无穷个挡位,这样能够极大地提高能源利用率,同时也能够提高排放的清洁性,同时由于是自动控制,CVT不需要人为的换挡,操作简单高效。综合来说,电动汽车与金属带式无级变速器CVT都是具有很好的发展前景,将二者很好的结合将进一步发挥他们的优势,使汽车节能环保,降低污染。采用Simulink软件能实现装载CVT的纯电动汽车的仿真,Simulink通过给予一个开放平台,通过已有的模块以及自定义模块的组合,在满足事实条件下,模拟出汽车的控制策略实现过程以及汽车的动力性表现等。
1 整车建模
1.1 整车建模依据
在ECE工况和匀速工况下,以汽车理论为基础,仿真汽车模型,计算汽车动力性参数。基本过程是,在驾驶员模型中,主要依靠PID参数调节驾驶员模型,驾驶员模型输出踏板开度后,在ECU模型中,经过特定算法,得到目标转矩发送给电机模型。在电机模型中,根据式(1)[1]得到转矩、转速及功率的关系。同时结合散热控制模块,电池信号输出电机转矩给CVT模型,CVT模型接到电机的转矩后,同时收到转速的信号,经过ECU判断信号后,进行速比调节,然后输出转矩给车身模型[2],依据式(2)得到驱动力,根据式(3)计算得到汽车的加速度,经过积分后得到汽车的车速,反馈给各个模块后进行实时控制[3]。
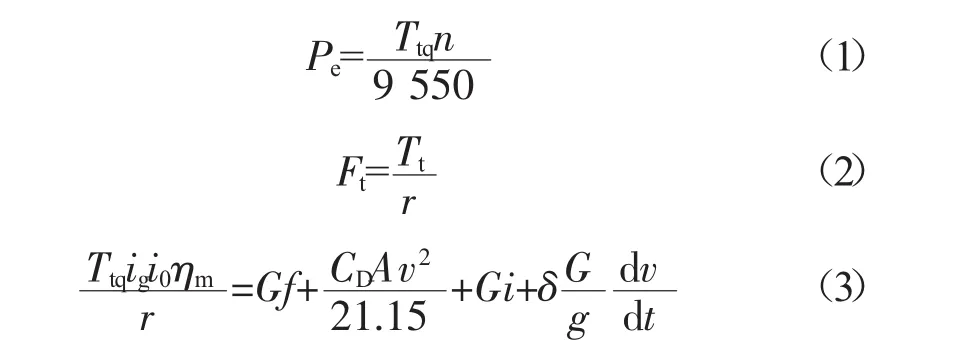
式中:Pe——发动机功率,kW;
Ttq——发动机转矩,N·m;
n——发动机转速,r/min;
Ft——汽车驱动力,N;
Tt——作用于驱动轮上的转矩,N·m;
r——驱动轮半径,m;
ig——变速器的速比;
i0——主传动比;
ηm——传动效率;
G——汽车重力,N;
f——滚动阻力系数;
CD——空气阻力系数;
A——迎风面积,m2;
v——车速,m/s;
i——坡度;
δ——旋转质量换算系数。
1.2 整车Simulink模型
整车模型[4]主要包括驾驶员模型、电机与电池模型、CVT模型、动力方程模型及ECU模型等。无级变速传动系统控制示意图,如图1所示。
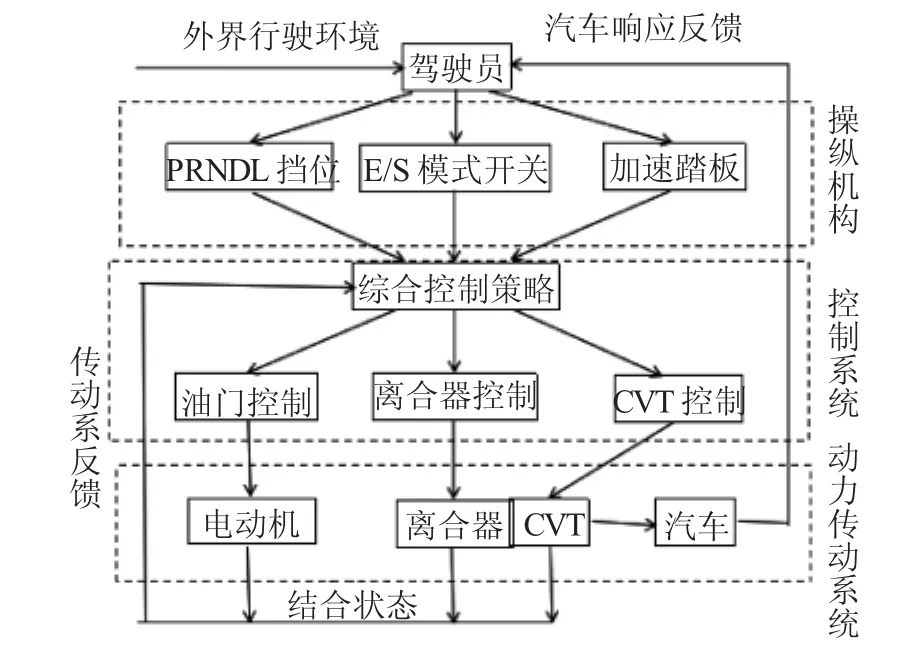
图1 无级变速传动系统控制示意图
1.3 整车参数
整车模型中,电池组参数为30组,单体电压为3.4 V,90 A·h。其余具体参数,如表1所示。

表1 装载CVT电动汽车模型各项参数表
2 仿真结果分析
2.1 ECE工况下汽车加速能力仿真与分析
ECE工况下装载CVT电动汽车速度仿真结果与实际对比,如图2所示。对比城市循环速度曲线和仿真曲线可知,目标车速和实际车速的变化过程基本一致。
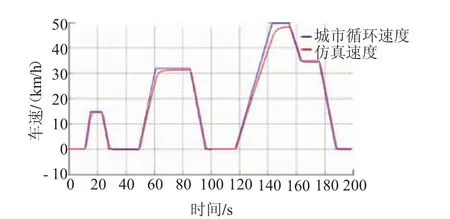
图2 装载CVT电动汽车速度仿真结果与实际对比图
ECE工况下装载CVT电动汽车转速仿真,如图3所示。与图2对比分析,转速变化符合行车规律,因此,电机模型比较成功。
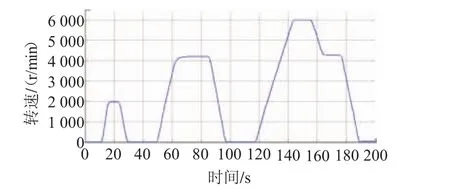
图3 装载CVT电动汽车转速仿真图
汽车的速比变化,如图4所示。速比变化与实际情况比较吻合,CVT的模块验证较为精确。
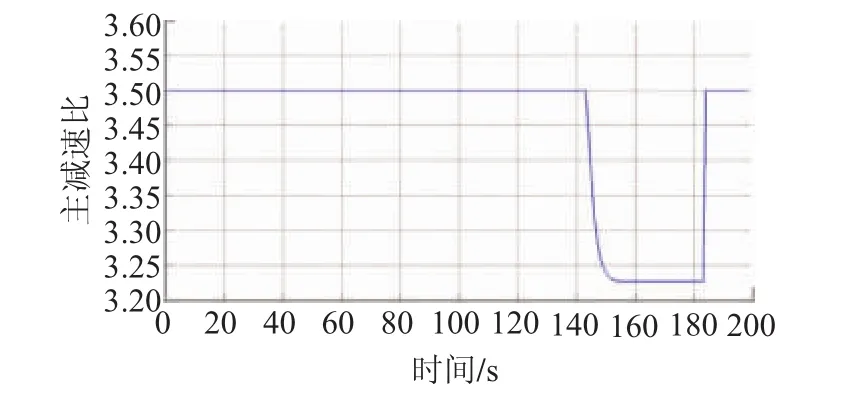
图4 装载CVT电动汽车速比仿真图
汽车实际功率情况,如图5所示。波形基本与实际车速波形吻合,功率的上升情况与速度的上升情况一致。由于实际车速在速度波峰时与目标车速基本接近,在接近区域时,功率有一定的稳定状态,符合功率的发出规律。
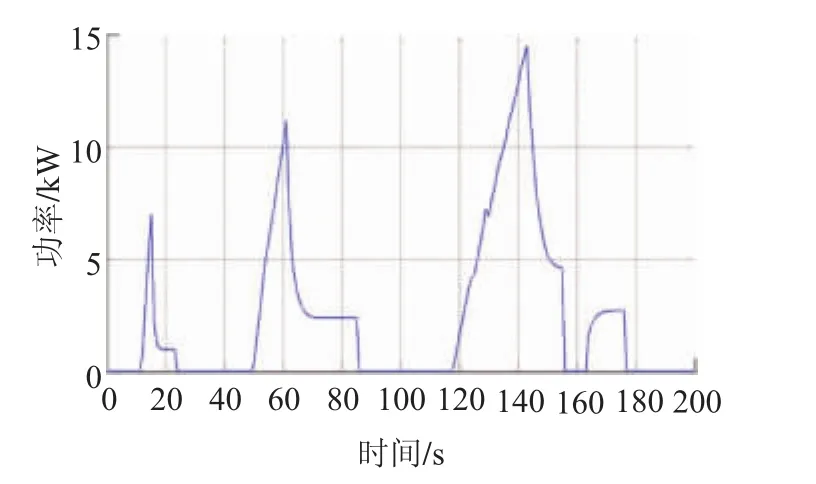
图5 装载CVT电动汽车实时功率图
汽车的加速踏板与制动踏板的开度情况,如图6所示。在汽车的加速与减速区间,踏板开度比较理想。
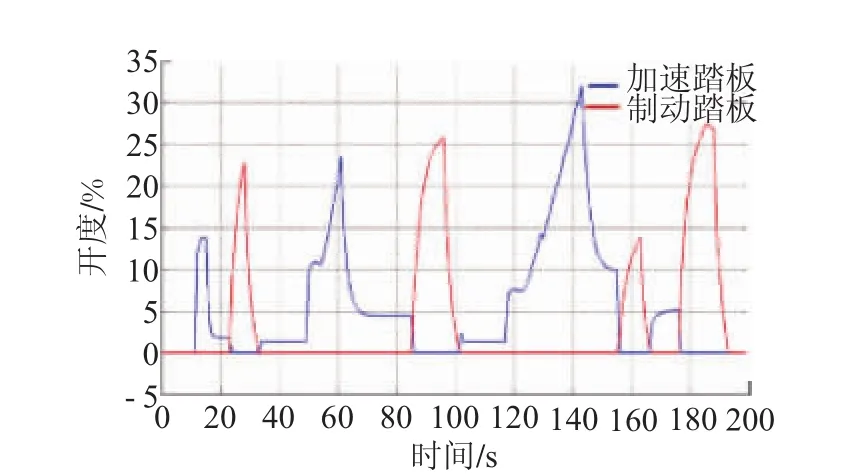
图6 装载CVT电动汽车加速踏板与制动踏板开度图
总的来说,以ECE工况为输入信号时,汽车的仿真结果比较接近真实情况,汽车的加速能力与制动能力均表现良好,各个参数指标都很正常。仿真结果说明装载该款电机时,以同参数为基础的车型可以适应ECE城市工况需求[5]。
2.2 50 km/h匀速工况下加速时间与续驶里程仿真与分析
50 km/h匀速行驶是纯电动汽车比较常见的城市行驶工况,在50 km/h的匀速状态下可以比较真实的反应汽车的续驶里程。在仿真模型中,输入车速信号50 km/h,输入仿真时间5 000 s。仿真结果,装载CVT电动汽车目标车速与实际车速仿真比较,如图7所示。装载CVT电动汽车电池剩余电量比值,如图8所示。
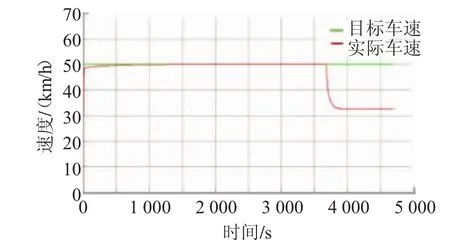
图7 装载CVT电动汽车目标车速与实际车速仿真比较
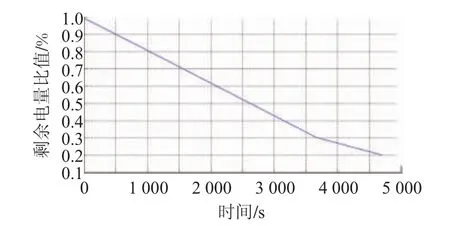
图8 装载CVT电动汽车电池剩余电量比值图
根据图7,仿真时间在4 500~5 000 s时,汽车停止。结合图8可以看出,在电量剩余30%的时候,电量下降速度开始变缓;结合图2说明ECU的控制模块已经将最大功率限制在了2.5 kW,ECU控制模块和电池模块均仿真正常。
装载CVT电动汽车续驶里程放大图,如图9所示。根据动力方程模块,在4 703 s时,停止仿真,此时汽车的行驶里程为6.034 8×104m,即续驶里程大致为60.34 km,与一般纯电动汽车的续驶里程接近,验证了电池控制是基本正确的,进一步验证了模型的准确性。
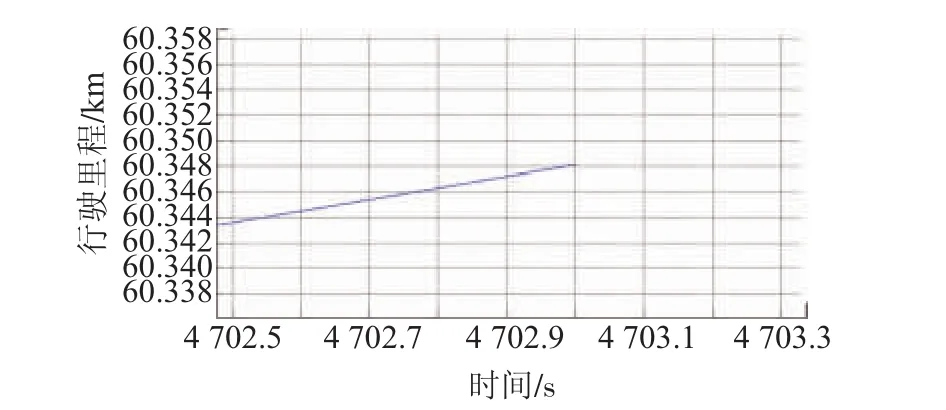
图9 装载CVT电动汽车续驶里程放大图
计算电动汽车的最高车速与加速能力,其仿真的基本思路是,输入一个较大的目标车速信号,这样汽车就会以最大的油门踏板开度即最大的加速度进行仿真,具体输入信号可设为200 km/h的信号,仿真结果,如图10所示。汽车在额定功率为11 kW和最高转速为6 000 r/min下的最大行驶车速为78 km/h。从图10可以看出,汽车的0~50 km/h加速时间为8.99 s,加速度基本能够满足平常的出行需求。
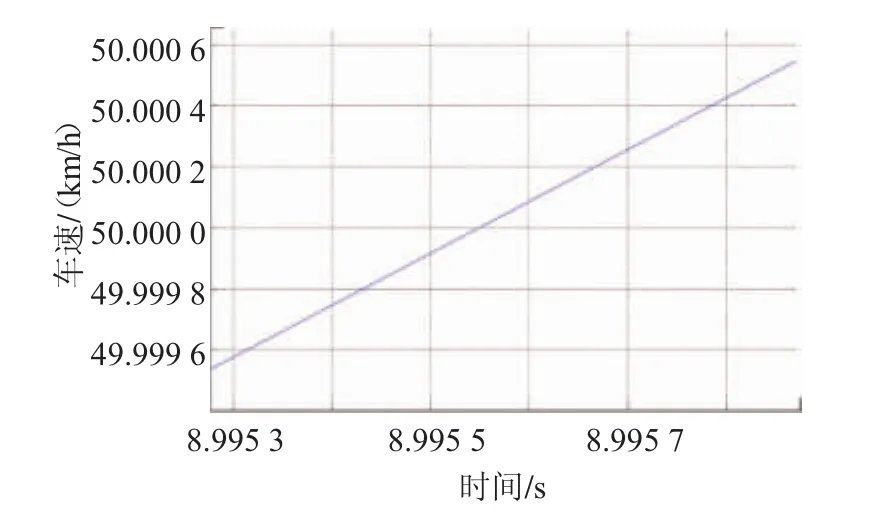
图10 装载CVT电动汽车车速放大图
3 结论
以Simulink软件为基础,通过建立整车的系统动力学模型,进行ECE工况和匀速工况下的整车性能仿真。仿真结果比较真实,符合纯电动汽车的基本数据,CVT控制比较合理。得出装载CVT的纯电动汽车0~50 km/h的加速时间为8.99 s,加速度基本能够满足平常的出行需求。在电机额定功率为11 kW,最高转速为6 000 r/min的条件下,得到汽车的最大车速为78 km/h,完全能够胜任所有的城市工况。当汽车以50 km/h从原地起步并保持匀速行驶状态时,汽车的续驶里程为60.34 km,基本符合正常电动汽车的续驶里程大小,比一般的纯电动汽车续驶里程略长,可以保证在一般的城市工况行驶。
通过仿真和分析可以看出,装载CVT的纯电动汽车,不论在动力性还是经济性上都有良好的表现,未来的汽车发展方向必然还是纯电力驱动方向。而仿真的结果也充分说明了CVT能够很好地运用到电动汽车上,由此不难想象,在未来的汽车领域,搭载CVT的电动汽车将会有一定的竞争力。
猜你喜欢
防爆电机(2022年2期)2022-04-26
昆明医科大学学报(2021年12期)2021-12-30
防爆电机(2021年5期)2021-11-04
汽车维修与保养(2019年1期)2019-05-05
汽车电器(2018年12期)2019-01-04
汽车与驾驶维修(维修版)(2018年8期)2018-09-21
电机与控制学报(2018年9期)2018-05-14
汽车维护与修理(2018年1期)2018-04-04
作文周刊·小学一年级版(2017年27期)2017-08-10
读写算·素质教育论坛(2017年16期)2017-08-04
