
改进最小二乘法双目视觉位姿测量技术研究与测试
2016-08-13 21:41徐昌源全燕鸣郭清达
中国测试 2016年9期
关键词:工业机器人
徐昌源 全燕鸣 郭清达

摘 要:由于工件表面油污、光照等因素干扰导致工件图像提取的特征点偏离实际位置,对工业机器人的抓取定位带来较大误差。该文以视觉引导工业机器人抓取气缸盖为应用对象,对双目视觉高准确度位姿测量技术进行分析。首先探讨特定条件下的双目视觉定位引导机器人技术以及粗差点产生原因与解决方法情况;其次介绍视觉系统视觉坐标系和目标坐标系,然后在位姿测量数学模型的基础上提出改进最小二乘法的准确计算方法,并搭建双目视觉引导的工业机器人抓取气缸盖系统进行测试分析。测试表明:改进最小二乘法的位姿计算方法可实现双目视觉对目标物的全自由度位姿测量,满足工业机器人高准确度抓取操作。
关键词:改进最小二乘法;双目视觉;位姿测量;工业机器人;气缸盖抓取
文献标志码:A 文章编号:1674-5124(2016)09-0027-04
0 引 言
目前,特定条件下的工业机器人双目视觉定位引导技术已经得到了一定研究与应用。这些研究与应用往往将作业目标简化成一个点,然后使用双目视觉对点进行定位;或者对于一些特定形状的目标(比如长方体、圆柱体),利用目标的特征点和几何特征获得目标的空间坐标[1-2]。这些应用场合的操作对象比较理想,往往不需要末端执行器高精度定位,或者不需要机器人6个自由度操作[3]。
机器人末端执行器抓取指定工件时,需要工件多个不共线特征点来建立工件坐标系。工件图像特征点的正确匹配,是求解工件坐标系相对世界坐标系位姿的关键,然而工件表面由于受油污、环境光等因素干扰导致图像提取的特征点往往偏离实际位置[4-6]。在求解过程中,经典最小二乘法对粗差点影响时获得求解矩阵偏离真实结果。目前去除粗差点解决方法是,在半自动化测量场合由人工剔除粗差点,或者采用RANSAC方法用部分点求解并用剩余点检验[7-8]。
本文采用剔除粗大误差来提高最小二乘法求解精度的思想,在双目视觉位姿计算的数学模型上,探讨一种基于改进最小二乘法的双目视觉位姿测量技术,并将其应用在工业机器人抓取气缸盖工业现场,使其测量精度和可靠性达到工业级应用的要求。
1 位姿计算的数学模型
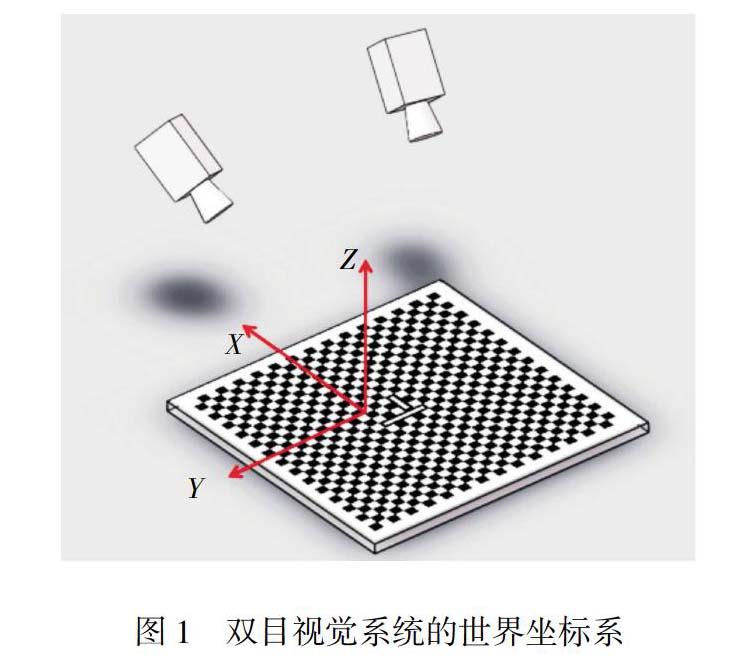
1.1 视觉系统的世界坐标系
在摄像机标定过程中,通过标定板上的特殊几何形状为摄像机指定一个世界坐标系,如图1所示。两台摄像机首先在各自方位同步拍摄一次标定板的图像,然后移动标定板获得其不同方位的多组图像用于标定各摄像机内外参数。其中根据第1组两幅图像所得到的外参数确定两个摄像机的世界坐标系。两个摄像机互相重合的世界坐标系作为双目视觉系统的世界坐标系。
1.2 目标坐标系
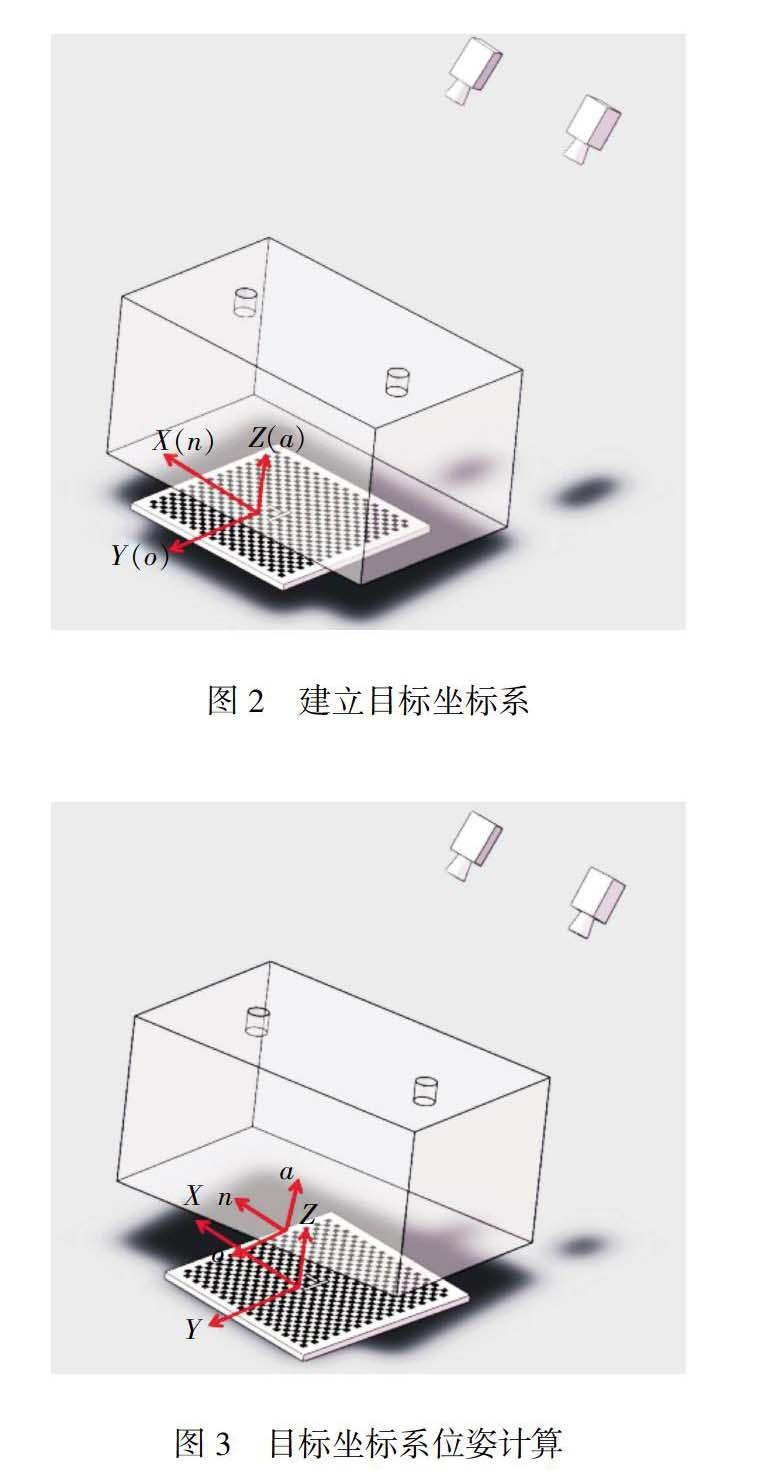
目标坐标系是指1个固定在目标物上的坐标系,通过特征点提取来获得目标上3个不共线的点在世界坐标系中的坐标,即可建立1个与双目视觉系统世界坐标系XYZ完全重合的目标坐标系noa,如图2所示。此时目标物各个特征点在目标坐标系中的坐标与其在世界坐标系中的坐标相同。
1.3 位姿计算
建立目标坐标系后,将图2中目标物移置在双目视觉系统中随机的新位姿,目标坐标系noa与视觉系统视觉坐标系XYZ不再重合,如图3所示。坐标系noa在坐标系XYZ中的方位将被用来表示目标物的位姿,求解目标物位姿就是计算这两个坐标系之间的转换关系。
设有坐标系A表示目标坐标系,坐标系B表示世界坐标系。点集{P1,P2,…,Pn}在坐标系A下的坐标值是{P1A,P2A,…,PnA},在坐标系B下的坐标值是{P1B,P2B,…,PnB}。BAP为目标坐标系在视觉系统的世界坐标系中的位姿,BAR为旋转矩阵,BAT为位移向量,有:
4 结束语
本文采用双目视觉位姿计算方法可以实现对工件上的目标坐标系全自由测量,应用改进最小二乘法可有效地抵抗粗大误差干扰,剔除误差点,得到精度较高的位姿测量结果,对目标工件图像特征点有了相当大的容错性。将获得的位姿计算结果发送给工业机器人控制器,末端机构执行相应的位姿抓取气缸盖。测试表明,系统稳定可靠,可满足工业级应用的准确度与要求。
参考文献
[1] LI H, CHEN Y, CHANG T, et al. Binocular vision positioning for robot grasping[Z]. IEEE,2011:1522-1527.
[2] 王其军. 六自由度机器人运动规划及视觉定位技术的研究[D]. 哈尔滨:哈尔滨工业大学,2008.
[3] 林琳. 机器人双目视觉定位技术研究[D]. 西安:西安电子科技大学,2009.
[4] 郭继平,李阿蒙,于冀平,等. 双目立体视觉动态角度测量方法[J]. 中国测试,2015,41(7):21-23.
[5] 邓桦. 机械臂空间目标视觉抓取的研究[D]. 哈尔滨:哈尔滨工业大学,2013.
[6] 兰太寿,李炜荣,刘向军. 基于虚拟双目视觉的电器电磁机构三维动态测试研究[J]. 电子测量与仪器学报,2014,
28(1):29-35.
[7] CORKE P. Robotics vision and control fundamental algorithms in matlab[M]. Berlin Heidelberg:Springer-Verlag,2011:402.
[8] FISCHLER M, BOLLES R. Random sample consensus: A paradigm for model fitting with applications to image analysis and automated cartography[J]. CACM,1981,24(6):381-395.
[9] ARUN K S, HUANG T S, BLOSTEIN S D. Least-squares fitting of two 3-D point sets[J]. Pattern Analysis and Machine Intelligence IEEE Transactions,1987(5):698-700.
[10] 武汉大学测绘学院. 误差理论与测量平差基础[M]. 武汉:武汉大学出版社,2003:213-217.
[11] 陈艳国. 回归预测模型的稳健性分析(异常值处理)[J]. 工程地质计算机应用,2005(3):22-25.
[12] 王福源,叶英植. 线性回归中粗差的特征值判别法及其应用[J]. 仪器仪表学报,1996(3):273-276.
[13] 顾立才. 基于双目视觉的机器人柔性识别系统的研究[D].合肥:合肥工业大学,2012.
[14] 徐德,譚民,李原. 机器人视觉测量与控制[M]. 2版. 北京:国防工业出版社,2011:53-59.
(编辑:李妮)
猜你喜欢
中国科技纵横(2016年20期)2016-12-28
科技创新与应用(2016年34期)2016-12-23
青春岁月(2016年22期)2016-12-23
汽车科技(2016年6期)2016-12-19
科技创新导报(2016年21期)2016-12-17
中小企业管理与科技·下旬刊(2016年10期)2016-11-18
科技视界(2016年18期)2016-11-03
企业导报(2016年13期)2016-07-19
科技视界(2016年15期)2016-06-30
成才之路(2016年4期)2016-03-23
