叶菜种苗移植机器人开发
2016-08-05 07:08杨艳丽江海宇杨丹彤陈伟健蔡桂林陈树基广州实凯机电科技有限公司广州5064广州市绿翔机电安装工程有限公司广州540华南农业大学工程学院广州5064
现代农业装备 2016年3期
杨艳丽,江海宇,杨丹彤,辜 松※,陈伟健,蔡桂林,陈树基(.广州实凯机电科技有限公司,广州 5064;.广州市绿翔机电安装工程有限公司,广州 540;.华南农业大学 工程学院,广州 5064)
叶菜种苗移植机器人开发
杨艳丽1,江海宇2,杨丹彤3,辜松3※,陈伟健3,蔡桂林3,陈树基3
(1.广州实凯机电科技有限公司,广州510642;2.广州市绿翔机电安装工程有限公司,广州511401;3.华南农业大学工程学院,广州510642)
目前叶菜生产作业环节机械化程度低,国内外针对蔬菜苗由穴盘向栽培槽内移植的自动移植机尚未有研究。本文对叶菜种苗移植机器人进行开发,实现了将叶菜种苗由穴盘向栽培槽自动移植,在保证95%移植作业成功率条件下,移植生产率可达1 500株/h,约为人工移植作业的2倍以上,显著提高了叶菜种苗移栽作业的生产率。
叶菜,种苗,移植,机器人
0 引言
我国是世界上最大的蔬菜生产国,蔬菜种植面积由1990年的600多万hm2增加到2010年的1 500 万hm2左右,产量由2亿t提高到5亿t,占世界总产量的60%左右[1],人均占有量由170 kg左右增加到370 kg左右,常年生产的蔬菜达14大类150多个品种,预计到2020年在播种面积不变的情况下,蔬菜产量将达到近6亿t,人均占有量400 kg[2]。叶菜类蔬菜是人们健康生活必不可少的食物。随着时代的发展,生活水平的提高,人们的健康意识也在逐步增强,因此对蔬菜的需要量也越来越大。
叶菜类蔬菜生产一般包括精量播种、种苗培育、种苗移植、叶菜培育和叶菜收获五个阶段。目前生产中的各作业环节机械化程度很低,仅在精量播种阶段实现了一定的机械化,其他作业环节仍需要大量的劳动力,尤其是种苗移植阶段,需要将叶菜苗由密集的栽培穴盘内移植到低密度、栽培空间较大的栽培容器内,目前移植作业主要依靠人工作业完成,且种苗高产移植期时间短,作业量集中,因此人工移植作业的劳动强度非常大,效率低。目前国内外的自动移植技术主要针对花卉苗由穴盘或小花盆向大花盆移植,针对蔬菜苗由穴盘向栽培槽内移植的自动移植机尚未有研究[3-5]。基于以上现状,本文对叶菜种苗移植机器人进行开发。
1 叶菜种苗移植机器人的开发
1.1构成
该叶菜种苗移植机器人主要由机架、上苗架、移植机构、送苗机构和行走机构组成,上苗架包括2个苗盘位,可放置2个穴盘,移植机器人对其中一个穴盘进行移植作业的时候,操作人员可进行上、下苗盘作业;移植机构是关键部分,其主要部件为移植手,完成对穴盘内的种苗抓取及将种苗放入到栽培槽内的作业;送苗机构是实现移植机构在穴盘上方和栽培槽上方的往复运动;行走机构在机架的下方,带动移植机器人整机运动,将种苗移植到不同位置的栽培槽内。
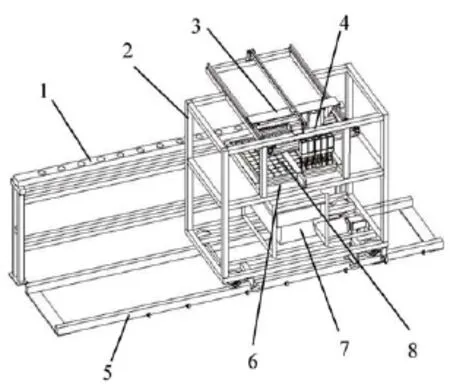
图1 叶菜种苗移植机器人构成
1.2作业原理
叶菜种苗移植机器人作业原理如下:首先由作业人员将载有叶菜的穴盘放置在上苗架后,移植机构动作,将移植手的滑针插入到穴盘的第一行穴孔内,将连带基质的种苗从穴孔内取出,移植机构一次动作,可实现对穴盘的一行种苗同时进行抓取;送苗机构将移植机构由穴盘取苗位置的上方移动到栽培槽放苗位置的上方,在移动的过程中,移植手的间距通过调节机构自动由穴孔的小间距调节为栽培孔的大间距,使移植手抓取的各个种苗的位于栽培槽的各栽培孔的正上方,此时,移植手向下动作,将种苗放入栽培槽的栽培孔内;送苗机构带动移植机构复位,使移植机构回到穴盘下一行穴孔的正上方,再进行移植作业;当完成一次移植作业后,行走机构带动移植机器人整机沿栽培槽运动,将穴盘种苗依次移植到整条栽培槽内。
2 关键机构设计
2.1移植机构设计本文开发的移植机器人移植对象为广东华农农业股份有限公司的叶菜种苗,使用穴盘为50穴,上口径为45 mm×45 mm,下口径为20 mm×20mm、深度约为48 mm。图2所示为叶菜移植机的作业对象形态,移植手滑针插入基质时其倾角的大小,需考虑夹紧力大小能够克服基质与穴盘的粘着力及基质重力将苗取出,同时还应考虑滑针插入时不损坏穴盘和尽可能不伤及种苗的根系,以免影响种苗后续的生长情况。在实际生产过程中,种苗基本都在基质的中部,为了避免滑针与穴盘接触及伤及种苗,滑针倾角设计为15°,滑针倾斜方向基本与穴孔斜度方向一致,如图3所示。图4为移植机构实物图。

图2 叶菜移植作业对象

图3 滑针倾角为15°时夹持状态

图4 移植手及滑针实物图
2.2行走机构设计
图5为移植机器人的行走机构。为保证行走机构的准确定位,采用整机在轨道上运行的方式,并在一边设定导轮确保移植机向定运动,承重轮为橡胶轮,可有效增加与型材轨道的摩擦力,减少滑转。驱动电机为交流异步电动机,电压 220 V,功率0.25 kW,减速比为60的减速机,整机动力由一台理力3500型汽油发电机提供电力。
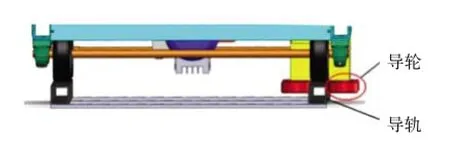
图5 行走机构仿真图
3 样机试验
3.1行走精度试验
行走机构的定位精度直接影响移植手取苗和放苗的精准性。为了考察移植机器人的行走定位准确性,对整机进行行走精度测定试验,考察在相同行走时间内,机器在变频器不同工作频率条件下的停机位置的准确性。行走时间为3 s,变频器的工作频率取高、中和低3个水平,分别为50 Hz、40 Hz和30 Hz,测量移植机在不同工作频率下的行走距离,每组试验进行9次,取平均值。试验结果如表1所示。
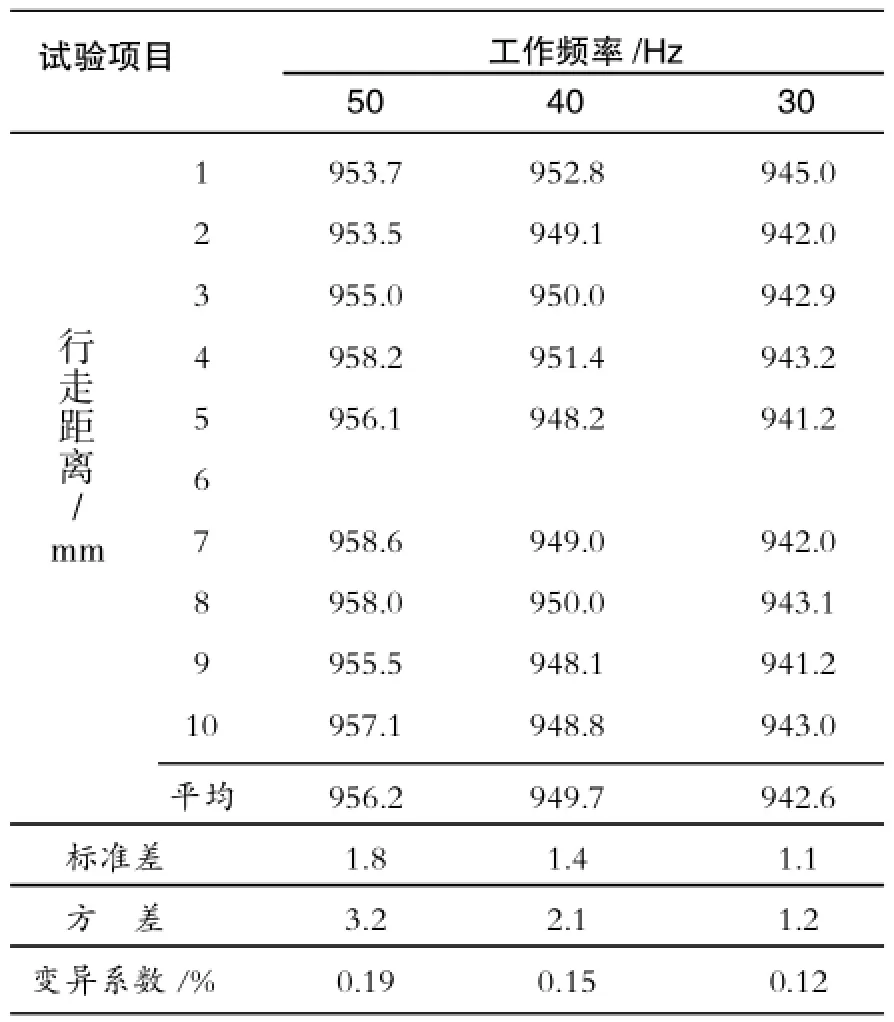
表1 行走精度试验结果
通过试验可以得到,变频器工作频率越低,即机器行走速度越慢时,整机的停机稳定性越好,行走越精准。整机的停机变异系数均不超过0.2%,能够满足移植生产需求。
3.2叶菜种苗移植作业试验

图7 叶菜种苗移植机器人样机
如图7所示为本文开发的叶菜移植机器人样机。针对广东华农农业股份有限公司生产条件培育的生产种苗,对样机进行种苗移植作业性能试验。采用50穴穴盘,轻型育苗基质,保证了良好的保水性和透气性。基质类型和质量配比为草炭∶椰糠∶珍珠岩=2∶8∶1;移植作业过程中基质含水率保持在70%~80%;移植作业性能试验用苗为苗龄18d的生菜种苗。在该条件下对4盘200株生菜苗进行移植作业,移植生产率达到了1 500株/h,自动移植成功率达到95%,不成功的原因主要由于本文设计的移植手对于基质填充不饱满和盘根效果不好的小苗不能适用。因此,为了保证较高的移植成功率,需对基质填充和苗的长势有一定的要求。
4 结束语
本文针对叶菜开发的种苗自动移植机器人,在作业精度上可以满足蔬菜种苗移植作业的要求。种苗自动移植机器人样机实现了将叶菜种苗由穴盘向栽培槽自动移植作业,在采用配比为草炭∶椰糠∶珍珠岩=2∶8∶1,含水率为70%~80%的栽培基质条件下,移植苗龄为18 d的生菜种苗,移植成功率可达95%,移植生产率可达1 500株/h,约为人工移植作业的2倍以上,显著提高了叶菜种苗移栽作业的生产率。
[1]李崇光,包玉泽.我国蔬菜产业发展面临的新问题与对策[J].中国蔬菜,2010,(15)∶1-5.
[2]冯青春,王秀,姜凯等.花卉幼苗自动移栽机关键部件设计与试验[J].农业工程学报,2013,29(6)∶21-27.
[3]国家发展和改革委员会,农业部.全国蔬菜产业发展规划(2011-2020年)[EB/OL](2011-12-01)[2016-06-22].http∶//www.ndrc.gov.cn/.
[4]韩长杰,杨宛章,张学军,等.穴盘苗移栽机自动取喂系统的设计与试验[J].农业工程学报,2013,29(8):51-61.
[5]韩绿化.蔬菜穴盘苗钵体力学分析与移栽机器人设计研究[D].镇江:江苏大学,2014.
Development of Leaf Vegetables Transplant Robot
Yang Yanli1,Jiang Haiyu2,Yang Dantong3,Gu Song3※,Chen Weijian3,Cai Guilin3,Chen Shuji3
(1.Guangzhou Sky Mechanical&electrical Technology co.,Ltd,Guangzhou 510640,China;2.GBC(GuangZhou)Mechatronics installation engineering co.,Ltd,Guangzhou 511401,China;3.College of Engineering,South China Agricultural University,Guangzhou 510642,China)
Currently,the mechanization of leaf vegetable seedlings production is weak,and study on leaf vegetables transplant robot remains unexplored at home and abroad.In this paper,the leaf vegetables transplant robot has been developed,and the automatic transplanting for leaf vegetable seedlings from potted tray to culture trough has been achieved.With 95%of success rate of transplanting,the productivity of the leaf vegetables transplant robot was at 1500 plants per hour,which was twice as manual transplanting operation.The productivity of transplanting operation of leaf vegetable seedlings had been improved significantly.
leaf vegetables,seedlings,transplant,robot
杨艳丽(1986—),女,博士,主要从事现代园艺生产装备的研究。广州广州实凯机电科技有限公司,510640。E-mail:yangduod@sina.com
※
辜松(1963—),男,博士生导师,教授,博士,主要从事现代园艺生产装备的研究。广州华南农业大学工程学院,510642。Email:sgu666@sina.com
猜你喜欢
南方农机(2022年20期)2022-10-20
农业装备与车辆工程(2021年8期)2021-08-28
南方农机(2021年1期)2021-01-20
今日农业(2020年23期)2020-12-31
四川蚕业(2020年3期)2020-07-16
现代营销·理论(2019年10期)2019-09-10
机电工程技术(2018年11期)2018-12-03
农业工程学报(2018年21期)2018-11-05
农机化研究(2018年6期)2018-06-06
现代园艺(2018年15期)2018-01-18