
电动轮方案设计及其鲁棒控制研究
2016-08-03 01:08:42方子帆杨蔚华何孔德
三峡大学学报(自然科学版) 2016年1期
方子帆 曹 钢 朱 陈 杨蔚华 何孔德
(1. 三峡大学 机械与动力学院, 湖北 宜昌 443002; 2. 三峡大学 新能源微电网湖北省协同创新中心, 湖北 宜昌 443002;3. 三峡大学 水电机械设备设计与维护湖北省重点实验室,湖北 宜昌 443002)
电动轮方案设计及其鲁棒控制研究
方子帆1,2,3曹钢1朱陈1杨蔚华1何孔德1
(1. 三峡大学 机械与动力学院, 湖北 宜昌443002; 2. 三峡大学 新能源微电网湖北省协同创新中心, 湖北 宜昌443002;3. 三峡大学 水电机械设备设计与维护湖北省重点实验室,湖北 宜昌443002)
摘要:参考某电动车车型参数,设计并建立了新型电动轮模型及其动力学模型,在此基础上设计了可控阻尼力悬架垂直振动的H∞鲁棒控制器.根据轮毂内有限空间,设计了轮毂电机、制动器等部件相应子系统并进行集成.根据电动车控制系统模型,在随机路面激励下,分析了系统时域与频域响应.研究结果表明,H∞鲁棒控制器控制性能稳定,在变参数条件下能保持良好的鲁棒特性;电动车车身垂直加速度、悬架动挠度在H∞鲁棒控制器控制下均得到明显的抑制.
关键词:电动轮;动力学模型;H∞鲁棒控制
随着节能环保问题倍受重视,各种类型的电动汽车正成为全球汽车行业的研究热点.纯电动汽车中,轮毂电机驱动型电动汽车具有很好的发展潜力,是目前国内外学者重点研究对象之一.
电动汽车是一个复杂的振动系统,对其研究时往往需要经过系统简化处理,这样就会导致简化后的系统模型不精确,同时存在着车身质量变化、外界干扰变化、轮胎胎压变化等系统参数的不确定性.如何合理考虑车辆振动系统不确定性参数的影响[1-3],是目前电动汽车研究的难点之一,而鲁棒控制策略针对此类问题有较好的应用.因此,以适用于城市道路交通的电动汽车为研究对象,开展与之相匹配的新型电动轮的设计,采用H∞鲁棒控制策略进行车辆动力学仿真有着十分重要的实用意义.
1电动轮设计
1.1总体设计方案
根据整车性能要求,确定电动轮设计的总体方案,某型电动车参数,见表1.电动轮主要包括轮毂电动机类型、悬架及减震器类型、制动器类型等[4-5],其总体方案设计流程,如图1所示.

表1 某型轮毂电机驱动紧凑型电动车参数

图1 电动轮的总体方案设计流程
1.2轮毂电机功率及制动力计算
1)轮毂电机功率计算
电动轮汽车在道路上行驶时,轮毂电动机正常运行功率在其额定功率附近,通常根据电动汽车的车速及爬坡等性能来初选轮毂电机的功率.
在水平路面上,电动轮汽车以最高车速行驶时的功率[6]为:
(1)
电动轮汽车以某一车速爬坡时所需功率[6]为:
(2)
电动轮汽车的最大功率需要满足最高车速及爬坡度等性能要求,因此,电动轮汽车轮毂电机输出的最大功率[6]为:
(3)
当电动轮汽车在水平路面上以最高车速vmax=110 km/h行驶时,根据式(1)计算得电动轮汽车需要的功率Pu=17.36 kW;当电动轮汽车以车速va=20 km/h行驶在坡度为i=11.3°的坡道时,根据式(2)计算得电动轮汽车需要的功率Pi=17.41 kW.结合式(3)选择电动轮汽车的额定功率为20 kW,文中电动汽车的驱动方式为四轮驱动,每个轮毂电机的额定功率为5 kW.为确保电动轮汽车具有较高的爬坡和承载性能,可将电动轮汽车的最大功率设定为28 kW,每个轮毂电机最大功率为7 kW.
2)制动力计算
制动常分为减速、应急、驻车制动等状态,其中应急制动所需制动力最大,因此,设计制动器时取应急制动力矩进行计算.
应急制动时,后轮一般都将抱死拖滑,后轮制动力FBr为:
(4)
式中,μ是轮胎与地面之间的附着系数;Fzr是制动车轮的垂直负荷.
对于两轴汽车,后轮制动力FBr可表示为:
(5)
式中,Fz是电动车重量(车身自重、乘客体重);l是电动车轴距;lf是电动车质心到前轴的距离;z是制动减速度,单位是g.
根据式(4)、(5)得到需要一个车轮制动器发出的制动力矩Mμ为:
(6)
式中,re是车轮的有效半径.
对于盘式制动器制动力矩的计算,假定制动衬块的摩擦表面全部与制动盘接触,并且各处单位压力p分布均匀,则盘式制动器的制动力矩Mμ为:
(7)
(8)
式中,Ra是有效半径;f是摩擦衬块与制动盘的摩擦系数;R1,R2分别是制动块的内、外半径;θ是制动块包角的一半.
根据表1的整车相关参数及上述公式计算,盘式制动器相应的衬片与制动盘之间的平均压力通常取为pm=1.5 N/mm2、制动块包角θ=30°,并假设电动车内乘员(包含驾驶员)总质量为120 kg,计算得Mμ=602.3 Nm,Ra=140 mm.设计制动衬块的有效作用半径为143 mm,制动盘半径为170 mm.
1.3电动轮设计参数
根据表1电动车的相关参数,选择轮胎型号为345/30 R19105Y,因此,选择尺寸为19×6.5J的深槽J型轮毂,以此型号轮毂的内部空间作为集成设计空间限定条件.
设计轴向磁场无铁心无刷永磁盘式电动机的结构示意图如图2所示.考虑到磁场中存在单边磁拉力,将驱动电机设计成双转子结构,将永磁块均匀分布后粘到电机外壳上.定子电枢无铁心结构,由绕组注塑形成,转子由高性能永磁材料与钢板粘接,两边对称的转子和位于中间的单定子构成双气隙[5-6].

1.电动机转子;2.磁体;3.电动机电枢定子;4.车轴图2 盘式永磁电机结构示意图
由于采用对称式不等长双横臂悬架,轮毂内部空间有较大裕量,可控阻尼力减振器能够安装在轮毂内.设计的可变阻尼减振器是以某紧凑型车减振器为基础,采用GH型连接方式,可控阻尼力减震器可集成在轮毂内.根据计算的轮毂电机功率与制动器制动力,确定电动轮子系统相关结构参数,见表2.

表2 电动轮结构设计参数
将车轮主轴与对称式不等长双横臂悬架连接,独立悬架支座上预留与车身及转向机构连接的安装孔,轮毂与电机外转子通过螺栓固定,电机定子电枢通过平键和套筒固定在车轮主轴上,制动钳固定在车轮主轴上,盘式制动器的制动盘与电机转子总成连接固定.在Pro/E中建立电动轮模型,如图3所示.
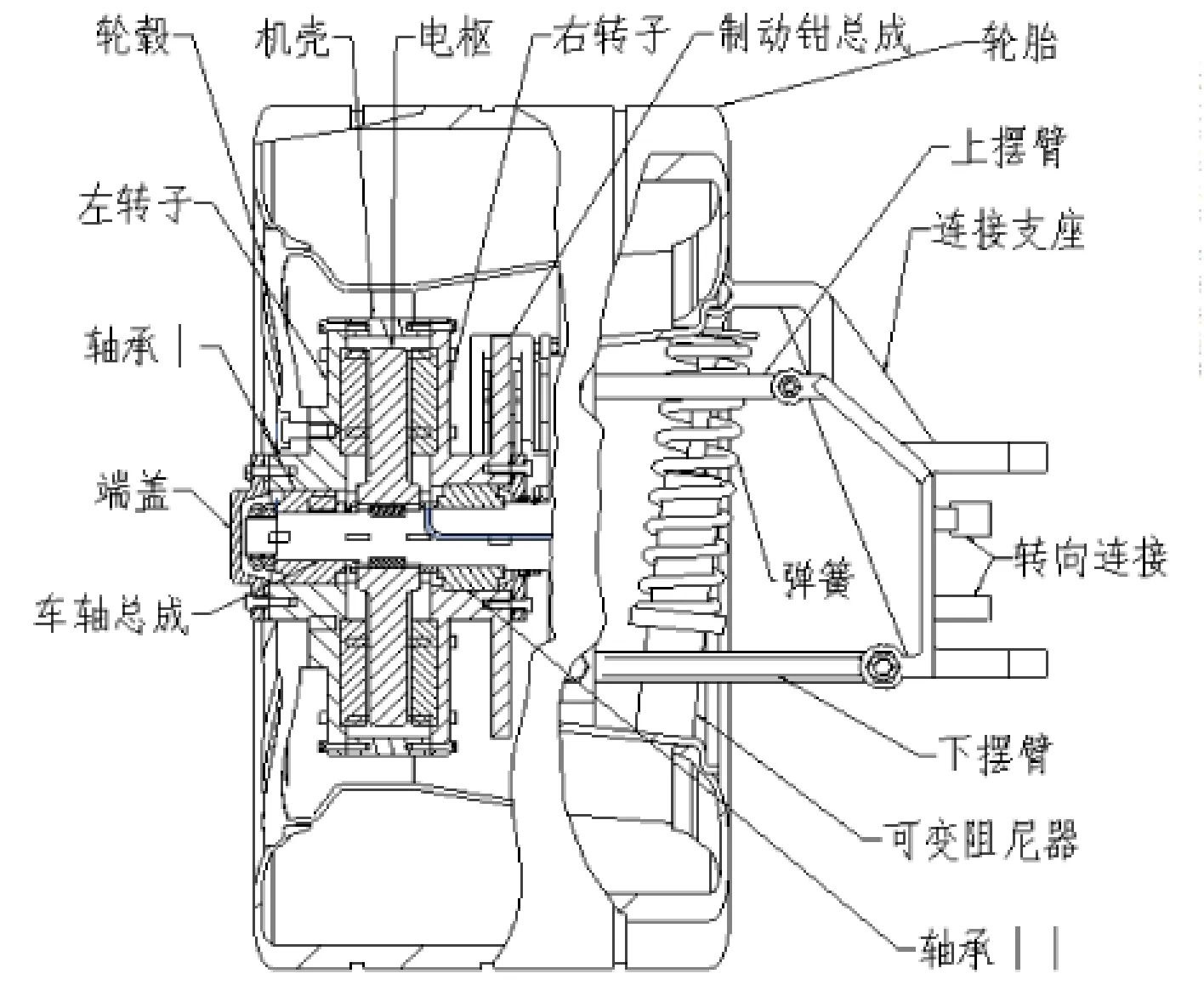
图3 电动轮模型
2单轮动力学模型
假设电动车在静平衡位置作微幅振动时,阻尼器的可控阻尼力是电动车速度的线性函数,螺旋弹簧的弹簧力是电动车垂直方向位移的线性函数;电动车行驶工况为匀速直线行驶在平直路面;不考虑车身质心在水平面内的运动;车轮等效为具有一定弹性的弹簧,此处不考虑车轮的阻尼力;悬架质量分配系数ξ=ρ2/ab的数值为1.将电动轮模型简化后得到其数学模型,用电动轮汽车的数学模型来描述外界干扰输入、系统及系统对外界干扰输入的反馈输出之间的关系.

图4 1/4电动车垂直振动模型
模型中m2为1/4电动车车身质量(簧载质量),m1为电动轮质量(非簧载质量),包括电机、制动器、独立悬架、弹簧减振器等各部件质量,c2为减振器阻尼系数,uc为可控阻尼力减振器的控制力,k1为轮胎刚度,k2为悬架刚度,z2为车身垂直位移,z1为电动轮垂直位移,z0为路面位移.电动车的相关参数,见表3.

表3 电动汽车振动系统参数
根据牛顿定律得到电动车垂直振动动力学微分方程,如式(9)所示.
(9)
式中,uc=cr(z2-z1),cr为可变阻尼系数.
由现代控制理论可选状态变量:
(10)
干扰输入ω=z0,控制输入F=uc,测量输出:
(11)
被控输出:
(12)
系统状态方程:
(13)
结合公式(10)~(13)得到以下矩阵参数:
3H∞鲁棒控制及其算法分析
3.1H∞鲁棒控制
鲁棒多变量反馈控制系统的设计问题可简单描述为设计系统控制规律的问题,即确保系统在外界环境干扰或系统本身存在不确定性影响下仍具有允许误差范围内的系统响应和误差.H∞标准控制的系统结构,如图5所示.

图5 标准问题框图
在H∞标准控制问题中,ω∈Rq为干扰输入信号,z∈Rr为被控输出,u∈Rm为控制输入信号,y∈Rp为测量输出信号,广义受控对象G(s)是系统给定的部分,K(s)为控制器,待设计部分.
为了实现对电动车可控阻尼力悬架垂直振动系统中车身垂直加速度、悬架动挠度及车轮动载荷等性能指标的控制,将系统状态方程(13)改写为:
(14)
(15)
结合式(14)、(15)得变换式:
(16)
考虑控制器uc=K(s)y,由式(14)和(15)可推出ω到z的闭环传递函数为:
(17)
标准设计问题是对于给定增广被控对象G(s),判定是否存在反馈控制器K(s),使闭环系统内部稳定,同时使得:‖Tzω(s)‖∞<γ.为不失一般性,文献中常取γ=1.
为提高系统外界干扰抑制鲁棒性,在系统输入信号中引入加权系数Sw(w);对于可控阻尼力减振器的动态特性,采用一阶微分方程来近似,这样会导致系统中存在高阶未建模不确定性,为提高动态未建模系统的鲁棒性,考虑系统的不确定性Δ,引入鲁棒加权函数矩阵Wrob(s);为改善被控系统的评价指标z,引入性能加权系数矩阵W(s),W1(s),W2(s),W3(s),W4(s)分别是对系统输出的车身垂直加速度、悬架动扰度、车轮动位移和可控输出力的加权;K(s)为设计的输出反馈H∞鲁棒控制器.H∞鲁棒控制的系统结构,如图6所示.
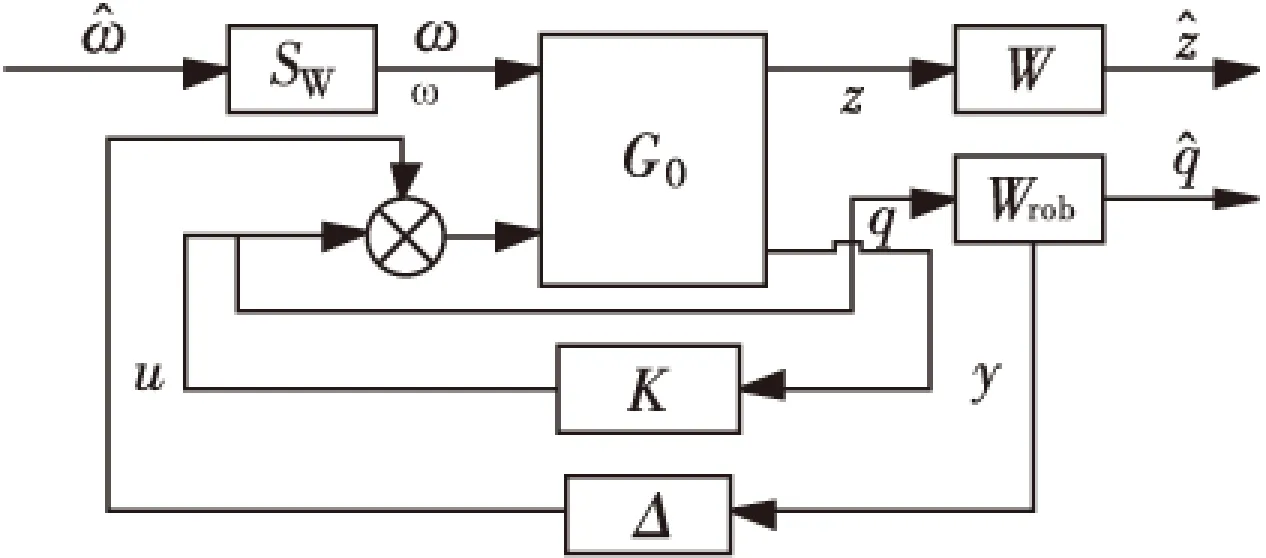
图6 鲁棒控制系统结构图
在一个指导性的原则下确定加权函数,根据所选取的性能指标加权函数来权衡其他性能指标的加权函数[7].对于系统输入、输出加权函数的选取,国内外学者做了很多研究[8-10],常取车身垂直加速度加权函数作为指导加权函数,根据人体对振动频率的敏感程度,应该加大车身垂直加速度加权函数在4~8Hz范围的权重.
通过反复试验验证,得到各性能指标的加权函数为:
3.2控制器参数计算
设计一个通过状态空间实现输出反馈的控制器uc=K(s)y,即
(18)

将控制器(18)应用到系统式后得闭环系统:
(19)
式中,
根据有界引理,闭环系统(13)是稳定的,且从ω到z的传递函数的H∞范数小于γ的充分必要条件是存在一个对称正定矩阵Xcl,使得
(20)
由于Acl,Bcl,Ccl,Dcl是依赖于控制器的未知参数,在式(20)中,矩阵变量Xcl和控制器参数矩阵Acl,Bcl,Ccl,Dcl会出现非线性.采用变量替换法,先对矩阵Xcl和它的逆矩阵进行以下分块:
(21)
式中,X,Y∈Rm×n是对称矩阵,且MNT=I-XY.
对式(20)变换后进行如下的变量替换:
(22)
结合式(19)~(22)可得两个等价的线性矩阵不等式(23)和控制器参数表达式(24):
(23)

*则表示由矩阵的对称性得到的矩阵块.
(24)

4电动车可控阻尼力悬架系统仿真
在Matlab/Simulink中,构建电动车可控阻尼力悬架H∞鲁棒控制原理图,如图7所示.
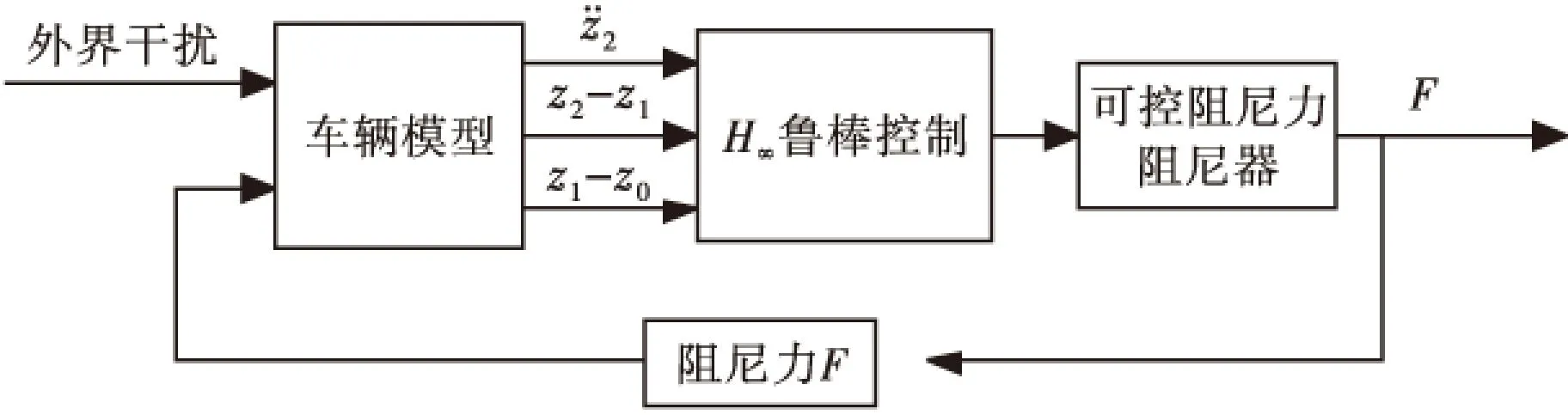
图7 电动车可控阻尼力悬架H∞鲁棒控制原理图
在B级路面上,电动车以V0=20 m/s匀速行驶,取1/4电动车身质量(簧载质量)为变量参数,通过Matlab/Simulink计算得到仿真结果.
1)标称车身质量(315 kg)仿真
从图8看出,经H∞鲁棒控制器控制后,车身垂直加速度在4~8 Hz范围内相对于被动悬架的车身垂直加速度得到了改善.

图8 车身垂直加速度功率谱密度

图9 车身垂直加速度仿真曲线
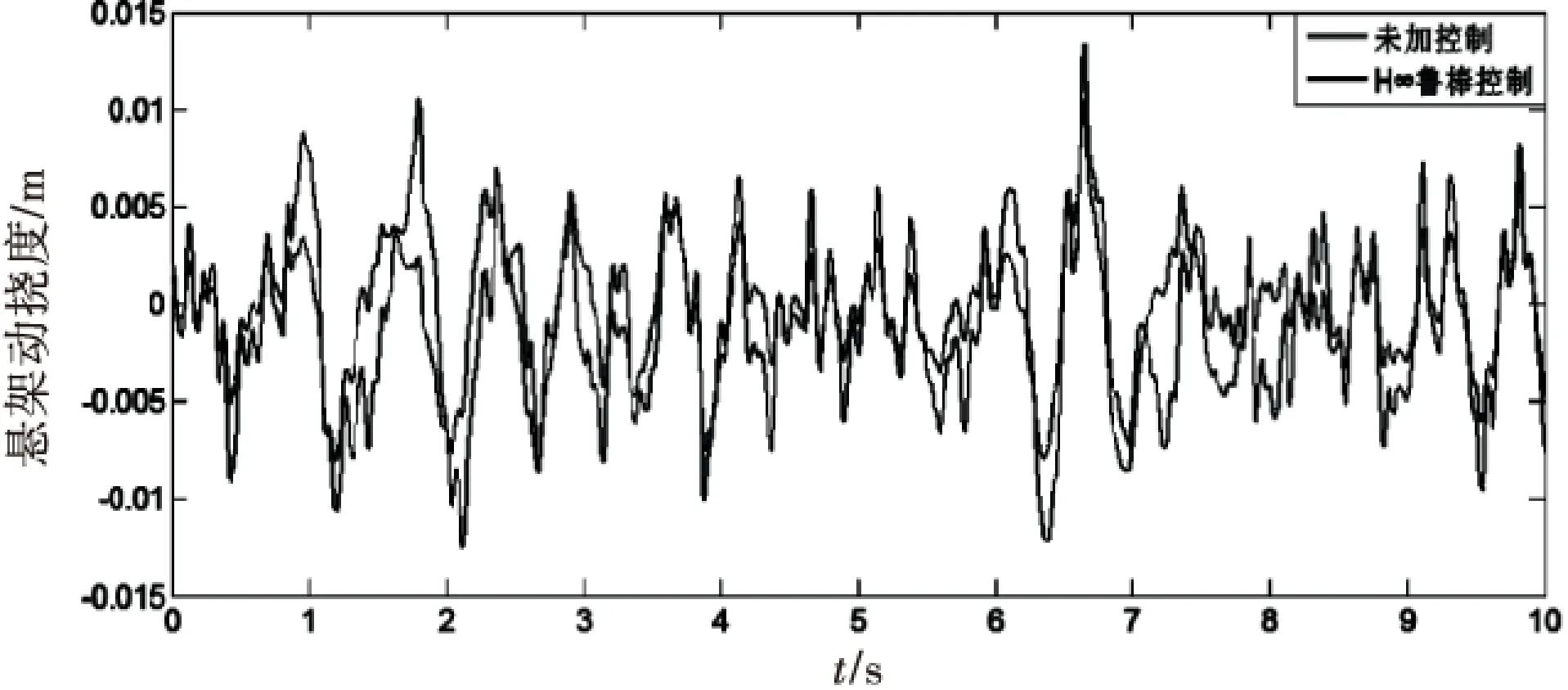
图10 悬架动挠度仿真曲线

图11 车轮动载荷仿真曲线

评价指标未加控制幅值 RMSH∞鲁棒控制幅值 RMS车身加速度/(m·s-2)4.5460.6463.0830.485悬架动挠度/m0.02590.00450.01920.0033车轮动载荷/N2408.54384.461952.09289.59
从表4分析看出,1/4电动车可控阻尼力悬架垂直振动经H∞鲁棒控制器控制后,车身垂直加速度幅值减小了32%,RMS值减小了24.9%;悬架动挠度幅值减小了25.8%,RMS值减小了24.44%;车轮动载荷幅值减小了17.92%,RMS值减小了23.68%.
2)变车身质量(375kg)仿真
从图12看出,经H∞鲁棒控制器控制后,车身垂直加速度在1~4Hz范围内改善效果不好,在4~8Hz范围内相对于被动悬架的车身垂直加速度得到了改善.

图12 车身垂直加速度功率谱密度

图13 车身垂直加速度仿真曲线

图15 车轮动载荷仿真曲线
从表5分析看出,当1/4电动车身质量改变,可控阻尼力悬架垂直振动经H∞鲁棒控制器控制后,车身垂直加速度幅值减小了15.2%,RMS值减小了21.16%;悬架动挠度幅值减小了17.84%,RMS值减小了9.37%;车轮动载荷幅值减小了28.54%,RMS值减小了28.4%.

表5 仿真结果比较
5结论
为适应城市交通的要求,在有限的轮毂空间内通过一体化设计,提出了结构紧凑、高效传动,集轮毂电机、制动器等为一体的电动轮系统,设计了基于输出反馈的H∞鲁棒控制器,进行了动力学仿真分析,结果表明:在H∞鲁棒控制器控制下,车身垂直加速度和悬架动扰度均有较明显的减小,系统具有很好的稳定性.所以,此电动轮设计方案是实用、可行的;此H∞鲁棒控制器具有很好的控制稳定性和参数鲁棒性,可以投入进行后续开发工作.
参考文献:
[1]DuHaiping,KamYimSze,JamesLam.Semi-activeH∞ControlofVehicleSuspensionwithMagnetorheologicalDampers[J].JournalofSoundandVibration, 2005(283): 981-996.
[2]贾英民.鲁棒控制[M].北京:科学出版社,2007.
[3]喻凡,郭孔辉.自适应悬架对车辆性能改进的潜力[J].中国机械工程,1998,9(6): 67-69.
[4]MichelinActiveWheel[EB/OL].http://servicesv2.webmichelin.com/frontnews/servlet/GetElement?elementCode=54609.2008-10-30.
[5]王晓远,陈静,王平欣.电动汽车盘式轮毂永磁电机设计[J].沈阳工业大学学报,2012,34(3):247-252.
[6]杨蔚华,李友荣,方子帆.新型多功能电动轮设计及整车动力性能仿真[J].科学技术与工程, 2014,14(12): 113-117.
[7]王莹.新型汽车主动悬架系统及其鲁棒控制研究[D].广州:广东工业大学,2005.
[8]WangJ,DongC,ShenY,etal.RobustModellingandControlofVehicleActiveSuspensionwithMRDamper[J].VehicleSystemDynamics. 2008, 46:509-520.
[9]SunT,YuF,LiuJ,etal.TheMixed-UncertaintyModelingandControlforActiveSuspensionBasedonRobustμ-Synthesis[J].JournalofShanghaiJiaoTongUniversity(Science). 2006, 6(40): 936-941.
[10]GasparP,SzasziI,BokorJ.DesignofRobustControllersforActiveVehicleSuspensionUsingtheMixedμSynthesis[J].VehicleSystemDynamics, 2003, 40(4):193-228.
[责任编辑张莉]
收稿日期:2015-08-31
基金项目:湖北省教育厅自然科学基金(D20141202);湖北省自然科学基金(2013CFA132);三峡大学科学基金(KJ2013B042);湖北省自然科学基金(2015CFB559)
通信作者:方子帆(1963-),男,博士,教授,博士生导师,主要研究方向为机械系统动力学与控制.E-mail:fzf@ctgu.edu.cn
DOI:10.13393/j.cnki.issn.1672-948X.2016.01.016
中图分类号:TH39
文献标识码:A
文章编号:1672-948X(2016)01-0078-07
Research on Design of Electric Wheel and Its Robust Control Method
Fang Zifan1,2,3Cao Gang1Zhu Chen1Yang Weihua1He Kongde1
(1. College of Mechanical & Power Engineering, China Three Gorges Univ., Yichang 443002, China; 2. Hubei Provincial Collaborative Innovation Center for New Energy Microgrid, China Three Gorges Univ.,Yichang 443002, China; 3. Hubei Key Laboratory of Hydroelectric Machinery Design and Maintenance, China Three Gorges Univ.,Yichang 443002, China)
AbstractReferring to the electric vehicle's parameters, the new electric wheel is designed and its dynamic model is established; and H∞robust controller of controllable damping force suspension is designed based on them. According to the limited space within wheel hub, wheel hub motor, actuator and its subsystem are designed and integrated. Based on the established electric vehicle's control system model, the response of electric vehicle in frequency domain and time domain are analyzed under random road excitation. The results show that the H∞robust controller demonstrates a good stability and robustness to parameter variations. Using H∞robust controller, the amplitudes of electric vehicle's body acceleration and the controllable damping force suspension's deflections are decreased obviously.
Keywordselectric wheel;dynamic model;H∞robust controller
猜你喜欢
制造技术与机床(2019年9期)2019-09-10 07:36:30
自动化学报(2019年6期)2019-07-23 01:18:22
北京航空航天大学学报(2018年1期)2018-04-20 06:38:13
内蒙古教育·职教版(2016年11期)2017-01-05 09:52:20
厦门理工学院学报(2016年1期)2016-12-01 04:50:41
北京航空航天大学学报(2016年7期)2016-11-16 01:51:01
现代经济信息(2016年24期)2016-11-09 05:10:15
系统工程与电子技术(2016年4期)2016-08-24 07:46:18
电脑知识与技术(2016年7期)2016-05-19 14:19:55
电脑知识与技术(2016年9期)2016-05-18 14:25:25
