
观测噪声对重力场数据融合方法的影响
2016-07-22 06:27崔立鲁
成都大学学报(自然科学版) 2016年2期
关键词:数据融合
崔立鲁
(成都大学 建筑与土木工程学院, 四川 成都 610106)
观测噪声对重力场数据融合方法的影响
崔立鲁
(成都大学 建筑与土木工程学院, 四川 成都610106)
摘要:随着信息获取手段越来越丰富,重力研究领域面临对大量不同类型数据的处理以及如何更好利用这些数据还原真实地球重力场等问题.利用配置法融合2种不同类型重力场数据来恢复某地区局部地球重力场为例,利用模拟数据分析不同大小的观测噪声和非稳态误差对数据融合结果的影响.模拟计算结果验证了配置法处理数据融合的有效性.数据融合结果对于精化地球重力场有较为显著的效果,同时对于不同大小的观测噪声和非稳态误差数据,数据融合结果均能获得一定的改善.
关键词:数据融合;观测噪声;重力场数据
0引言
测绘学科本身的发展以及地球相关学科的研究迫切需要精细地球重力场的支持.目前现代重力测量技术已能够提供多种不同类型的重力场参数或相关重力场信息,这些不同类型的观测值反映了地球重力场不同的频谱特性,各自具有不同的分辨率和精度水平[1-2].如何有效地综合利用这些不同类型的数据精化地球重力场,是大地测量学中迫切需要解决的问题之一.目前,常用的重力场数据融合方法主要有最小二乘配置法、最小二乘联合平差法、最小二乘谱组合法和频域输入输出法等[3-6].其中最小二乘配置法应用于重力场数据融合处理的有效性及观测噪声如何影响融合结果等有待进一步深入研究.为此,本研究通过分析最小二乘配置法的基本原理和计算公式,并利用模拟数据探讨不同大小的观测误差和非稳态观测误差对于数据融合的影响.
1最小二乘配置法
在重力场逼近中,最小二乘配置方法的最大优点是可以同时利用多种不同类型的重力观测值来确定地球外部重力场,运用该方法的关键是要获得一个符合实际情况的关于观测值的协方差函数.
根据Moritz H(1984)的理论推导,最小二乘预估公式为,
(1)
式中,s表示推估点的值,l为观测值的数据,Csl为推估值与观测值的互相关协方差,Cll为观测值之间的协方差.
如果要估计的信号s是某一点的异常位T(P),组成l向量的观测值是异常引力场中的任意量,例如,大地水准面高、重力异常或垂线偏差.上面这些量中任一个都可以用位T的线性泛函来表示.一般有,
li=LiT
(2)
或,
l=BT
(3)
式中,向量B是由泛函Li组成,li(i=1,2,…,q)为观测值.
(4)
如果q个线性泛函LiT是由观测给出,将式(1)应用到该问题上,可得,
(5)
式中,CPi(i=1,2,…,q)为异常位与观测值之间的协方差函数,Cii(i=1,2,…,q)为观测值之间的协方差函数.
在重力数据融合中,当观测值为大地水准面高和重力异常,推估值为任意值时,其相应公式为,
(6)
协方差函数主要表示了不同类型数据及数据与误差之间的相互关系,而数据融合所依据的标准是根据这些相互关系来确定不同数据在融合过程中所占的比重.
协方差函数的计算主要分为2种方法,即,
1)根据数理统计原理运用经验公式计算出相应的协方差值,再运用解析拟合的方法,得到经验协方差函数.
2)利用经典的协方差函数模型,如Tscherning/
Rapp协方差模型,通过全球或局部地区重力观测值数据拟合出函数模型相关参数,从而得到适合全球或局部的协方差函数模型.
本研究采用第1种方法.
观测值f的协方差函数定义为,
C(S)=M(f*,f ′*)
(7)

(8)
式中,C(S)横和C(S)纵分别表示横向和纵向协方差,分别按下式计算.
(9)
在实际应用中,需要知道研究区域内连续的协方差值,即需拟合出一个符合研究区域情况的经验协方差函数.Groten(1966)、Jordan(1972)和Lauer(1973)先后给出了3种经验协方差函数的数学表达式,分别为,
C(d)=C0exp(-dln2/ζ)
(10)
C(d)=C0(1+d/(αζ))exp(-d/αζ)
(11)
C(d)=C0/(1+(d/ζ)2)
(12)
式中,d为两点间的间距,C0、ζ为拟合参数,a≈0.59582.
此外,利用常规的几何拟合方法也可以得到经验协方差函数.例如,多项式拟合函数,
p(x)=p1xn+p2xn-1+…+pnx+pn+1
(13)
式中,p(x)为函数值,(p1,p2,…,pn,pn+1)为函数的参数值,即需拟合的参数,x为函数自变量.
运用最小二乘平差可求解函数参数.下面以多项式拟合函数为例,简单介绍函数参数的求解过程.
1)首先,建立误差方程,V=BX-l,
X=[p1p2…pn+1]T
l=[p(x1)p(x2)…p(xm)]T
V=[v1v2…vm]T
2)根据VPVT=min,可得(p1,p2,…,pn,pn+1)函数参数值,即得到协方差函数的估值,
3)根据上述平差求解,可得到式(10)~(13)中的待定参数和.由结果可知C0是间距为0时的协方差值,ζ为协方差函数的相关长度,可以通过下式求得,
C(ζ)=C0/2
(14)
2试算结果与分析
本研究利用EGM96模型生成某局部地区2'格网大地水准面高和重力异常,以及25个大致均匀分布的检核点数据,包括大地水准面高和重力异常,其纬度范围为29°41′00″N~31°19′00″N,经度范围为103°05′00″E~104°43′00″E,平均高程(相对于参考椭球)为515.221 m.以EGM96模型计算值作为真值,在真值中加入不同的观测噪声作为输入的观测数据,分析不同大小的观测误差和非稳态观测误差对数据融合的影响.
2.1不同误差大小数据的融合
为了验证不同误差大小的观测数据对融合结果的影响,本研究对4种不同大小误差的大地水准面高和重力异常数据分别进行融合计算,输出信号分别为大地水准面高和重力异常,并利用25个大致均匀分布的检核点数据对融合结果进行评价.
1)算例1.标准差为1 cm正态分布误差的大地水准面高和标准差为0.1 mGal正态分布误差的重力异常.
2)算例2.标准差为10 cm正态分布误差的大地水准面高和标准差为1 mGal正态分布误差的重力异常.
3)算例3.标准差为10 cm正态分布误差的大地水准面高和标准差为0.1 mGal正态分布误差的重力异常.
4)算例4.标准差为1 cm正态分布误差的大地水准面高和标准差为1 mGal正态分布误差的重力异常.
表1给出了在不同大小误差情况下2种重力场数据融合结果的精度评价.其中,在进行协方差函数计算时,采用了三次多项式拟合函数.
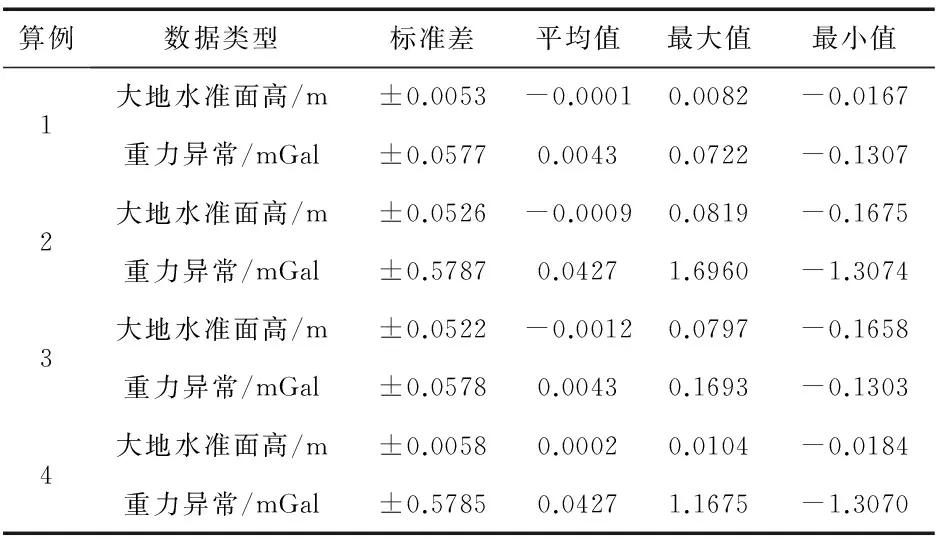
表1 不同误差大小数据融合结果的精度评价
从表1可以看出,融合后的大地水准面高和重力异常的精度明显改善,说明联合多种重力场信息有助于获得更高精度的地球重力场参数.比较算例1~4可知:在相同的数据分辨率的条件下,当大地水准面高的精度足够高时(1 cm),提高重力异常的精度对大地水准面高的影响很小,但随着大地水准面精度的降低(10 cm),重力异常的作用明显增强;大地水准面高的精度随着重力异常精度的提高均有较明显的改善,融合结果的精度主要受输入信号中观测噪声的影响.
2.2非稳态误差数据的融合
为了验证非稳态误差的观测数据对融合结果的影响,本研究模拟了2种非稳态误差的大地水准面高和重力异常数据,其分布如图1(a)和(c)所示.
1)算例1.如图1(a)所示,将研究区域均匀分为4部分,1、2、3和4部分大地水准面高的误差分别为标准差1、2、3和4 cm的正态分布误差,重力异常的误差分别为标准差0.1、0.2、0.3和0.4 mGal的正态分布误差.
2)算例2.如图1(b)所示,与算例1误差分布情况相同的稳态误差分布,即根据算例1中4个区域的观测误差统计出研究区域内总的误差标准差,即大地水准面的误差为标准差2.796 cm的正态分布误差,重力异常的误差为标准差0.2796 mGal的正态分布误差.
3)算例3.如图1(c)所示,将研究区域非均匀分为4部分,1、2、3和4部分大地水准面高的误差分别为标准差1、2、3和4 cm的正态分布误差,重力异常的误差分别为标准差0.1、0.2、0.3和0.4 mGal的正态分布误差.
4)算例4.如图1(d)所示,与算例3误差分布情况相同的稳态误差分布,原理同算例2,即大地水准面的误差为标准差3.163 cm的正态分布误差,重力异常的误差为标准差0.3163 mGal的正态分布误差.
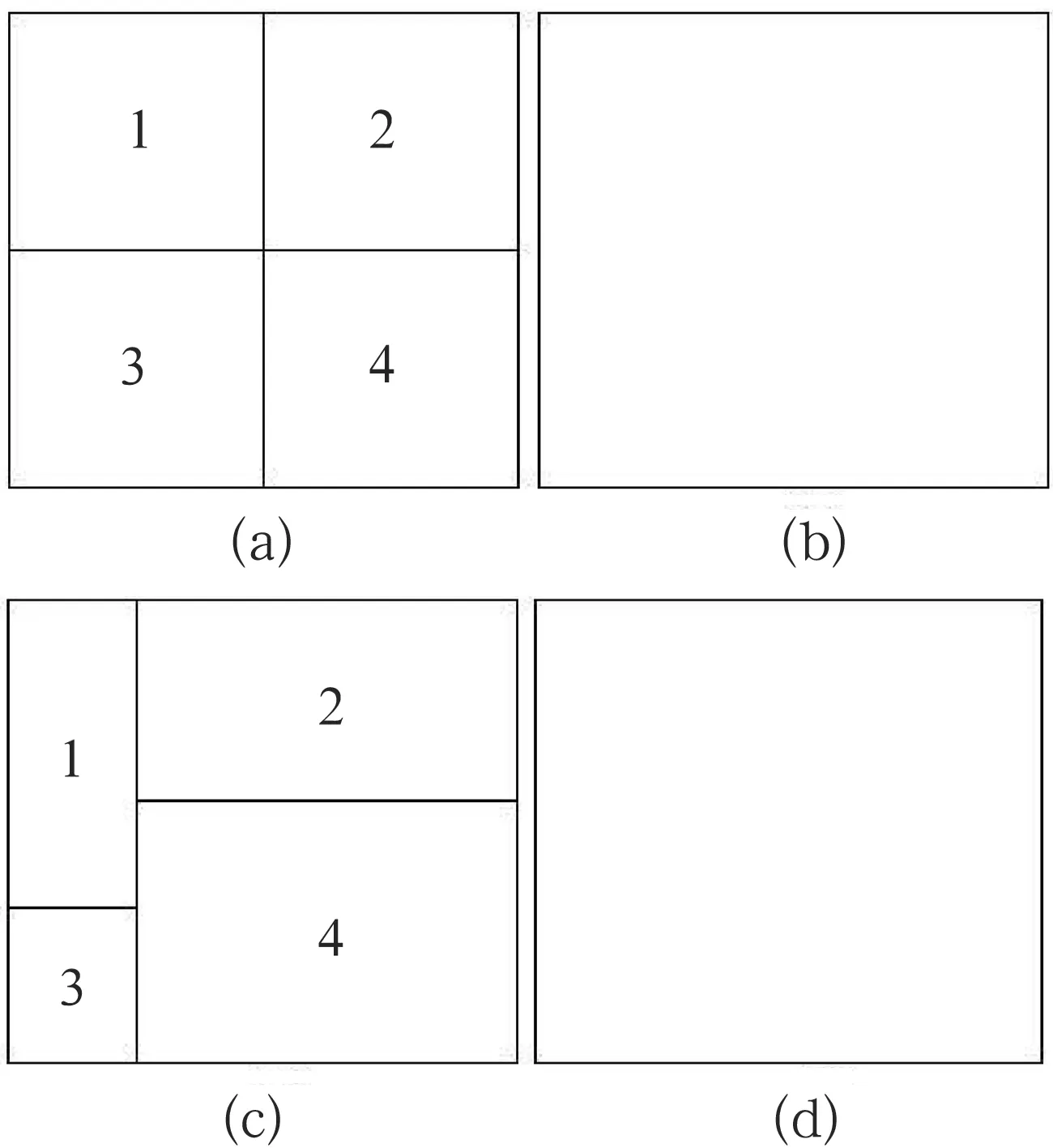
图1 非稳态误差数据的分布示意图
表2给出了在非稳态误差情况下2种重力场数据融合结果的精度评价.从表2中算例1和3的结果可以看出,融合后的大地水准面高和重力异常的精度从整体看来得到了改善,这说明运用最小二乘配置法融合非稳态误差的观测数据时仍然可获得满意的结果.比较算例1和2可知,均匀分布的非稳态误差数据的融合结果优于相应稳态误差分布的融合结果,而算例3和4的结果正好相反,这说明非均匀分布的非稳态误差数据对数据融合有一定影响.
3结论与建议
融合多种重力场信息精化地球重力场,是物理大地测量学中的热点问题之一.本研究采用最小二乘配置法融合大地水准面高和重力异常数据精化局部大地水准面或重力异常为例,通过模拟试算结果分析了不同大小的观测噪声和非稳态误差对数据融合结果的影响.试算结果表明,无论是融合处理不同大小误差的数据还是非稳态误差的数据,融合后的大地水准面高和重力异常的精度均有明显改善,这初步验证了观测误差对于数据融合的影响,如融合重力异常和GPS水准数据精化大地水准面等.
目前,除了大地水准面高和重力异常外,现有的重力场探测技术还可以获取其他多种重力场信息,如卫星测高数据、卫星重力数据等,不同分辨率和不同基准的重力场数据融合问题等都需要在后续工作中进一步深入研究.
参考文献:
[1]Arabelos D,Tziavos I N.EstimationofthegravityfieldandseasurfaceheightsfromheterogeneousdatainthecentralMediterranean[J].Int Ass Geod Symp,1990,106:63-74.
[2]Kern M,Schwarz K P,Sneeuw N.Astudyonthecombinationofsatellite,airborne,andterrestrialgravitydata[J].J Geod,2003,77(3-4):217-225.
[3]汪海洪,罗志才,罗佳,等.多分辨最小二乘配置法初探[J].大地测量与地球动力学,2006,26(1):115-118.
[4]崔立鲁,罗志才,钟波,等.观测噪声对频域输入输出法数据融合的影响[J].大地测量与地球动力学,2009,29(1):79-83.
[5]崔立鲁.局部大地水准面确定方法研究[J].河南科技,2012,37(2):67-69.
[6]Sideris M G.Ontheuseofheterogeneousnoisedatainspectralgravityfieldmodelingmethods[J].J Geod,1996,70(8):470-479.
Influence of Observation Noise on Gravity Field Data Fusion Method
CUILilu
(School of Architecture and Civil Engineering, Chengdu University, Chengdu 610106, China)
Abstract:With the enrichment of information technology,gravity field is faced up with the processing of a great deal of various information as well as the problem of how to make full use of the data to restore the real gravity field of the earth.The paper,taking the restoration of a partial earth gravity field in a certain area by fusing two different kinds of gravity field data through collocation method as an example,utilizes the analogue data to analyze the influence of the observation noise of different scales and the non-steady error on the results of data fusion.Simulation tests show that the collocation method is effective for data fusion processing.Data fusion results have more significant effects on the elaboration of earth gravity field.At the same time,the observation noise of different scales and non-steady error data can improve the data fusion results to a certain extent.
Key words:data fusion;observation noise;gravity field data
文章编号:1004-5422(2016)02-0183-04
收稿日期:2015-11-23.
基金项目:成都大学校青年基金(2014XJZ22)资助项目.
作者简介:崔立鲁(1983 — ), 男, 硕士, 讲师, 从事大地测量学与工程测量研究.
中图分类号:P223
文献标志码:A
猜你喜欢
现代电子技术(2016年24期)2017-01-19
东方教育(2016年10期)2017-01-16
电子技术与软件工程(2016年22期)2016-12-26
科技视界(2016年14期)2016-06-08
科技视界(2016年3期)2016-02-26
物联网技术(2015年11期)2015-11-26
物联网技术(2015年11期)2015-11-26
物联网技术(2015年8期)2015-09-14
物联网技术(2015年5期)2015-07-18
物联网技术(2015年4期)2015-04-27
