
纯电动汽车双电机耦合驱动系统的模式切换研究
2016-07-20 03:52郭兴众高文根孙驷洲
安徽工程大学学报 2016年2期
王 硕,郭兴众,高文根,孙驷洲
(安徽工程大学安徽省检测技术与节能装置重点实验室,安徽芜湖 241000)
纯电动汽车双电机耦合驱动系统的模式切换研究
王 硕,郭兴众∗,高文根,孙驷洲
(安徽工程大学安徽省检测技术与节能装置重点实验室,安徽芜湖 241000)
摘要:对采用双电机耦合驱动系统的纯电动汽车的工作模式进行研究.根据行星耦合驱动系统的结构特性与工作原理,将其工作模式分为低速单电机模式和高速双电机耦合模式等.在满足车辆性能要求的前提下,通过对双电机采用单电机驱动或双电机耦合驱动进行合理、高效地控制,可以提高驱动系统效率.基于单电机驱动模式时车辆的最高车速,控制行星耦合装置中制动器的锁止与松开,实现从单电机驱动模式切换至双电机耦合驱动模式的控制.在Matlab/Simulink环境下搭建仿真模型进行了验证,仿真结果表明,该控制策略能够根据驾驶员的需求对双电机的工作状态进行有效地控制,实现了从单电机驱动模式向双电机耦合驱动模式的切换,满足车辆性能要求.
关 键 词:双电机;耦合驱动;制动器;模式切换
现代城市建设的发展对纯电动汽车需求越来越多,应用多动力耦合技术的双电机耦合驱动系统在大功率纯电动汽车上的应用日益广泛,为受制于电机技术和机械传动材料的大功率纯电动汽车的发展提供了新的解决途径,成为纯电动汽车驱动系统研究的发展趋势.动力耦合驱动技术能够在满足车辆性能要求的前提下,合理分配与合成各个动力源的输出,使动力源工作在其效率最优的范围内,优化动力耦合驱动系统的驱动特性和系统效率,从而提高纯电动汽车的动力性能指标[1-2].双电机耦合驱动系统作为一种多动力耦合技术的应用,主要由驱动电机、耦合装置、控制器等组成.控制器通过对车辆的工作信号、驾驶员的意图、控制命令等信息的采集判断车辆所处的状态,结合所设计的控制策略实现对车辆的控制.选择适合车辆的工作模式,并对驱动系统动力源的功率进行合理分配,使动力源的驱动状态最优.因此,双电机耦合系统在纯电动汽车的发展过程中具有更大的节能潜力和更好的发展前景.
根据行星耦合装置的结构和工作特性,对采用双电机行星耦合驱动系统的纯电动汽车电机的工作模式进行了分析研究,通过合适的模式切换控制策略控制车辆在不同状态下工作模式的切换[3-6],重点研究在不同工况下单电机驱动模式向双电机耦合驱动模式的切换控制.对构建纯电动汽车双电机耦合驱动系统模型进行了仿真验证,仿真结果表明,该模型能够表达出双电机耦合驱动系统的工作情况,选取的控制策略能够对双电机耦合驱动系统进行有效控制,准确实现单电机驱动模式向双电机耦合驱动模式的切换.
1 双电机耦合驱动系统结构与特性分析
双电机耦合驱动系统结构如图1所示.由图1可知,系统主要由电机1、电机2、制动器B和一组行星耦合装置构成.其中,电机1是主驱动电机,与行星耦合装置的太阳轮连接;电机2是辅助电机,与齿圈和制动器B连接;行星耦合装置的行星架与减速装置连接,最终驱动车辆行驶.该系统可以根据车辆工作的不同模式选择单电机驱动或者双电机耦合驱动.在需要低速大转矩的情况下,电机1单独工作,制动器B锁止.电机1驱动太阳轮经行星架驱动车辆,电机经大速比减速增扭后驱动汽车,满足汽车低速大转矩工作要求;在需要高速低转矩的情况下,制动器B松开,辅助电机2开始工作,经行星耦合装置实现双电机耦合驱动.在系统工作过程中,不同的模式切换时电机1一直处于驱动状态.系统主要通过对电机2和制动器B的控制,实现驱动系统的模式切换.双电机耦合驱动系统是一种多动力传动系统,电机1和电机2不仅可以作为动力源驱动车辆行驶,而且在制动过程中,还可作为发电机运行,实现车辆的回馈制动模式,有利于车辆的能量回收.

图1 双电机耦合驱动系统结构简图
根据等效杠杆法[7]将系统中行星耦合装置的3个主要构件等效为水平布置的3个等效杠杆,分别代表行星架c、太阳轮s、齿圈r.无论行星装置的驱动关系如何变化,3个构件的转速转矩结点都在一条直线上.3个杠杆支点相对的位置由行星耦合装置的特性参数k决定,而且任意两个构件的转速(转矩)就可以等效出第3个构件的转速(转矩).
当汽车在起步和爬坡过程中,车辆对转矩的需求较大,此时选择单电机单独工作,制动器B锁止,满足汽车低速大转矩工作要求.电机驱动太阳轮经行星架后驱动车辆行驶.当系统达到稳定状态时,其转速转矩关系[8]为:


当车辆需要较大车速时,电机的转矩小、功率大,此时采用双电机耦合驱动模式满足车辆高速大功率的要求.电机分别通过太阳轮和齿圈经向星耦合装置输入动力,通过耦合后经行星架输出动力驱动车辆行驶.当系统达到稳定状态时,转速关系满足:

利用等效杠杆法可得单电机驱动和双电机耦合驱动时的最高车速为:

式中,vmax1为电机1的最高车速;nmax1为电机1的最高转速;vmax12为双电机耦合驱动时的最高车速;nmax2为电机2的最大转速;i为定减速比;r为车轮有效半径.
2 工作模式及切换
采用双电机耦合驱动系统的纯电动汽车,根据双电机耦合驱动系统中电机和制动器的关系,分析得到5种车辆工作模式[9]:空挡模式、低速单电机驱动模式、高速双电机耦合驱动模式、低速单电机制动模式、高速双电机耦合制动模式.双电机耦合驱动系统实现工作模式的基础是对驱动电机和制动器的控制.合理的控制算法既可实现两个驱动电机的协调控制,又能提高车辆运行效率,增强车辆的操纵感和舒适度.
在Matlab/Simulink环境下搭建了制动器控制的模型,以单电机驱动下的最高车速vmax1作为限制条件,控制制动器的锁止与松开,实现车辆由单电机驱动模式切换至双电机耦合驱动模式的控制.当车速低于vmax1时,控制制动器锁止,车辆处于单电机驱动模式;当车速高于vmax1时,控制制动器松开,车辆切换到双电机耦合驱动模式.
当车辆由低速模式(单电机工作模式)切换到高速模式(双电机耦合工作模式)的过程中,电机1一直工作在最高转速附近,处于驱动状态.在车速等于u2时,制动器解除,电机2转为驱动状态,实现两台电机的功率耦合.在模式切换的过程中,系统一直有动力输出,以克服车辆的行驶阻力,实现模式切换无动力中断,以保证车速上升或至少保持不变.

式中,nmax1为电机1的最高转速.
在模式切换过程中,系统一直有动力输出,以克服车辆的行驶阻力,实现模式切换无动力中断,保证车速上升或至少保持不变.当车速接近车辆最高车速时,驱动力与行驶阻力达到平衡,车辆不再具有后备功率.合理有效地模式切换是实现车辆经济性、动力性、舒适性的基础,对于采用以转速作为模式切换的约束条件,可以使控制系统结构简单,在车辆运行过程中模式切换次数较少,能更好地改善车辆的动力性.
3 仿真分析
采用前向式的仿真模式,在Matlab/Simulink环境下搭建了双电机行星耦合驱动的纯电动汽车仿真模型,主要包括驾驶员模型、电机模型、整车模型、行星耦合装置和蓄电池模型等[10-11].驾驶员模型由Signal Builder模块构成,模拟驾驶员对踏板的踩踏角度;整车模型将整车质量、迎风面积、空气阻力系数、滚动半径、摩擦系数等参数封装在一起来模拟车辆行驶信息;行星耦合装置由Sim Driveline工具箱下的Planetary Gear模块和制动器模块构成.在仿真实验中根据双电机耦合驱动系统的结构特性和相关设计要求,完成对应的电机参数、行星耦合装置特性参数k、定减速比i等参数的匹配[12].由于研究的重点是双电机行星耦合驱动系统的模式切换,不研究蓄电池,因此假设驱动状态下蓄电池SOC足以满足车辆的动力需求.假设车辆在城市道路上行驶,在不同路况下,驾驶员对踏板踩踏的强度不同,车辆在单电机驱动模式下行驶的时间不同.踏板强度较大时,车辆需要在低速模式工作的时间越短,应尽快切换到双电机耦合驱动模式使之达到较大车速.踏板强度如图2所示.将其定义为低速行驶模式,该模式下车辆车速在30 km/h以下,驾驶员对加速踏板进行小角度的控制,车辆对车速要求小,没有达到设置的切换条件,此时由电机1单独驱动,制动器锁止.车速行驶状态如图3所示.

图2 踏板强度

图3 行驶车速
踏板强度如图4所示.将其定义为正常行驶模式,该模式下驾驶员对踏板的踩踏角度是从小到大,可以识别为驾驶员驾驶车辆从低速起步到逐渐加速的过程.车速状态如图5所示.由图5可以看出,车辆在近13 s时,车速达到了30km/h的切换条件,车辆从单电机驱动模式切换到双电机耦合驱动模式.切换成功后车辆用较高的加速度对车辆进行加速,满足车辆对车速需求.

图4 踏板强度

图5 行驶车速
踏板强度如图6所示.将其定义为高速行驶模式,该模式下驾驶员对踏板的踩踏程度一直保持着较大的幅度,说明对车辆具有高速度的需求.行驶车速如图7所示.从图7中可以看出,车辆在近5 s时即达到了切换条件,从单电机驱动模式切换到双电机耦合驱动模式.在整个仿真过程中车速一直保持在较高的状态,满足驾驶员对动力性的要求.
踏板强度如图8所示.由图8可知,该模式下驾驶员踩踏加速踏板到最大角度并保持长时间状态.车速状态如图9所示.由图9可知,在该模式下约18s时车辆达到最大车速,且在约5 s时就从单电机驱动模式切换到双电机耦合驱动模式,满足车辆在短时间对车速达到最大的要求,使车辆具有更好动力性.在仿真过程中,当车辆在18 s达到最大车速时,由于车辆达到了最高车速,即驱动力与行驶阻力达到了平衡点,车辆不再具有后备功率.
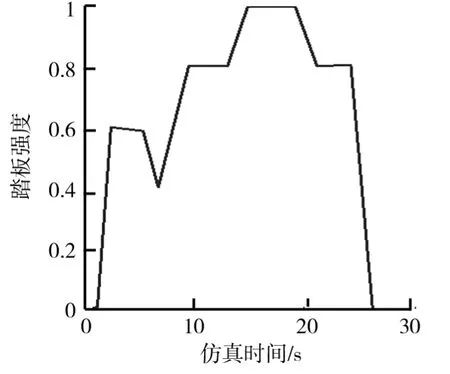
图6 踏板强度

图7 行驶车速

图8 踏板强度

图9 行驶车速
4 结论
以双电机行星耦合驱动系统的纯电动汽车作为研究对象,并对双电机耦合驱动系统的工作状态及其在工作模式之间切换进行了研究,探索出一种适用于从单电机驱动模式向双电机耦合驱动模式进行切换的控制策略.通过仿真验证了在不同路况下车辆能够根据驾驶员对踏板的控制实现相应的车速需求,同时,根据车速判断车辆的工作模式,实现从单电机驱动模式向双电机耦合驱动模式的切换.在满足车辆性能的前提下,优化驾驶员对车辆的操纵感,改善纯电动汽车的动力性.
参考文献:
[1] 蒋科军,何仁,束驰,等.混合动力汽车动力耦合技术综述[J].机械传动,2015,39(4):175-181.
[2] 张硕,张承宁,王志福,等.电动汽车多动力耦合系统结构与分析[J].大功率变流技术,2012(5):47-50.
[3] 赵治国,何宁,朱阳,等.四轮驱动混合动力桥车驱动模式切换控制[J].机械工程学报,2011,47(4):100-109.
[4] C N Zhang.Mode switching control strategy of dual motors coupled driving on electric vehicle[J].Journal of Beijing Institute of Technology,2011,20(3):394-398.
[5] 刘振军,史波,赵江灵,等.强混CVT轿车模式切换控制[J].重庆理工大学学报:自然科学,2013,27(7):1-7.
[6] 韩光伟.张承宁.双电机耦合驱动系统试验台构建及控制策略试验[J].微特电机,2014,42(9):70-75.
[7] 邹乃威,王庆年,刘金刚,等.混合动力汽车行星机构动力耦合装置控制研究[J].中国机械工程,2010,21(23):2 847-2 851.
[8] 饶振刚.行星齿轮传动设计[M].北京:化学工业出版社,2003.
[9] 武小花.纯电动客车双电机耦合驱动系统控制策略研究[J].高技术通讯,2013,23(8):863-867.
[10]白羽鹤,范健文,谭光兴,等.基于Matlab/Simulink的混联式混合动力电动汽车建模与仿真[J].计算机与现代化,2014 (3):24-30.
[11]杜波,秦大同,段志辉,等.HEV多领域物理建模与模式切换控制仿真[J].系统仿真学报,2013,25(7):1 668-1 674.
[12]范健文,郭毅锋,林川,等.纯电动大客车双电机行星耦合传动系统参数设计[J].科学技术与工程,2013,13(35):10 741-10 745.
Mode switching of dual motors coupled driving on pure electric vehicle
WANG Shuo,GUO Xing-zhong∗,GAO Wen-gen,SUN Si-zhou
(Anhui Key Laboratory of Detection Technology and Energy Saving Devices, Anhui Polytechnic University,Wuhu 241000,China)
Abstract:The operational mode for the dual motors of coupled drive system used in pure electric vehicle is studied.The planetary coupling drive systems were divided into the low-speed single motor and highspeed dual-motor mode based on the structure and working principles.The reasonable and efficient control strategy can improve the efficiency of the drive system using a single motor drive or dual-motor coupling drive in meeting the requirements of the premise.Controling the brake in the planetary coupling device for mode switching from the single motor drive to the dual-motor coupling drive based on the maximum speed of the vehicle can improve the system efficiency.They were verified by building simulation models in Matlab/Simulink environment.The test results show that this control strategy can control the double motor for effective state according to the drive's needs.The mode switching from the single motor drive to the dual-motor coupled drive is achieved and satisfies the performance requirements of the vehicle.
Key words:dual-motor;coupling drive;brake;mode switching
中图分类号:U469.72
文献标识码:A
收稿日期:2015-10-15
基金项目:安徽省自然科学基金资助项目(1408085ME105)
作者简介:王 硕(1990-),男,河南商丘人,硕士研究生.
通讯作者:郭兴众(1962-),男,安徽阜阳人,教授,硕导.
猜你喜欢
车主之友(2022年6期)2023-01-30
机电信息(2022年9期)2022-05-07
黄河之声(2019年23期)2019-12-17
汽车实用技术(2019年17期)2019-09-21
中国特种设备安全(2019年3期)2019-04-22
装备制造技术(2018年8期)2018-10-17
汽车维护与修理(2018年1期)2018-04-04
作文周刊·小学一年级版(2017年27期)2017-08-10
黄河之声(2017年13期)2017-01-28
汽车维护与修理(2015年5期)2015-02-28
