
基于统一控制策略的光伏微网控制器参数敏感性分析
2016-07-12 07:45:45茆美琴李晶菁申亚涛
电源学报 2016年2期
关键词:敏感性分析
茆美琴,李晶菁,黄 辉,申亚涛
(合肥工业大学教育部光伏系统工程研究中心,合肥230009)
基于统一控制策略的光伏微网控制器参数敏感性分析
茆美琴,李晶菁,黄辉,申亚涛
(合肥工业大学教育部光伏系统工程研究中心,合肥230009)
摘要:针对低压光伏微网中逆变器的控制,设计了一种基于统一控制策略的控制器,能够避免微网在并网和孤岛两种运行方式间切换时控制策略的转换,实现不同运行模式间的平滑切换及光伏微源功率均分。对传统的下垂控制进行改进,在传统下垂控制的基础上引入一个功率PI补偿器。根据阶跃响应动态指标和稳定性要求,利用根轨迹法优化设计控制器参数。最后,在Matlab/Simulink环境下进行了仿真,结果验证了所设计的控制器的可行性和有效性。
关键词:光伏微电网;统一控制器;根轨迹法;动态响应指标;敏感性分析
Project Supported by the National Basic Research Program of China(973 Program)(2009CB219708);The National Natural Science Foundation of China(51077033);National International Cooperation Project(2014DFA70660-03);Anhui Province Scientific and Technological Research Project(1501021049)
引言
典型的光伏微网由光伏阵列、储能装置和本地负载组成,通过电力电子变换器集成到交流母线,并利用静态开关SS(static switch)经由公共耦合点PCC(point of common coupling)接入中/低压配电网[1-2]。借助静态开关,光伏微网既可以并网运行也可以离网(孤岛)运行。电力电子变换器在保证光伏微网中负载可靠供电,实现微网运行模式平滑切换等方面发挥了重要作用。近年来,已经提出了多种能够实现上述控制目标的算法和策略。文献[3]提出了一种基于储能系统的微网无缝切换技术,深入分析了储能控制器功率环、电压环和电流环的三环控制策略,能够保证微网系统电压和频率稳定。但是这种方法需要监测微网的运行模式以选择相应的控制算法,难以保证快速且平滑的无缝切换;文献[4-5]都提出了基于下垂控制的统一控制策略,但对逆变器控制器的参数设计并没有进行详细介绍。
为了使微网光伏逆变器控制器实现快速稳定的双模式运行,本文对传统的下垂控制进行改进,引入一个功率PI补偿器,设计了统一控制器。将功率环和下垂控制环组合起来,使逆变器在并网时自动实现电流型控制,而在离网时自动实现电压型控制,达到光伏微网并/离网无缝切换的目的。根据预先设定的系统动态响应指标和稳态限制条件,采用根轨迹法对控制器参数进行了优化设计,仿真结果验证了该控制算法的可行性和有效性。
1 光伏微网组成及统一控制策略
本文所述光伏微网由光伏阵列、储能蓄电池、本地负载和电力电子变换装置等组成,如图1所示。光伏阵列和储能电池通过电力电子变换器连接到交流母线,交流母线经静态开关SS与低压配电网相连,图中的DC/DC环节代表直流变换器,DC/ AC环节表示逆变器。光伏微网正常运行时,接受主电网调度,同其他常规电源共同维持主电网可靠稳定运行;若主电网发生故障,微网脱离主电网独立运行,提高本地重要负载的供电可靠性;一旦主电网恢复正常,微网又能并入主电网[1]。
光伏微网运行状态不同,光伏逆变器的控制目标也不相同。并网运行时,微网的电压和频率被电网箝位,此时要求光伏阵列最大限度输出电能,因此需要对它进行最大功率跟踪以保证输出更多能量,逆变器等效为恒功率(PQ)控制;孤岛运行时,微网中的逆变器除了要给本地负荷提供必要的功率外,还要给微网提供电压和频率支撑,常采用下垂控制。为了避免逆变器在不同的运行模式下因控制目标的不同而切换不同的控制策略,本文对传统的下垂控制策略作了改进,设计了基于统一控制策略的控制器,使其能够更好地适应并/离网无缝切换。

图1 光伏微电网结构框图Fig.1 Structure block diagram of a PV-MG
图2为基于统一控制策略的逆变器控制框图,DER为分布式发电电源,代表光伏列阵或者储能电池组,本文特指光伏阵列,假定传输线路呈感性。控制器包括功率外环和电压电流内环,功率外环分为有功功率环和无功功率环,与传统下垂控制的差别如图中虚线框所示。
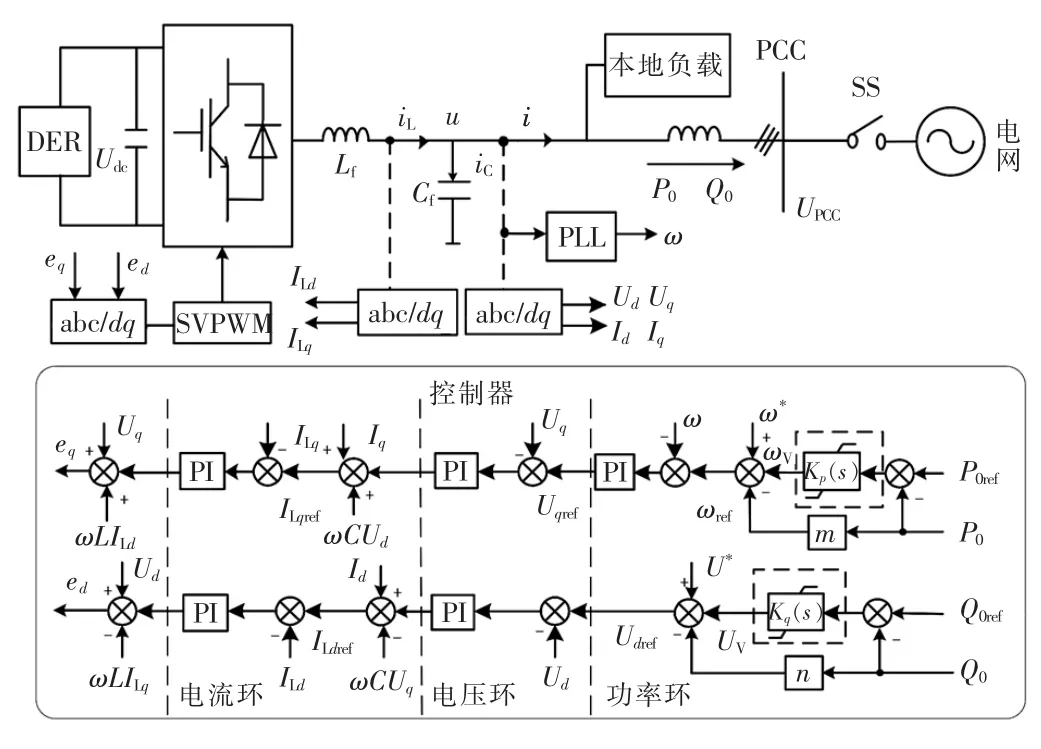
图2 基于统一控制策略的微网逆变器结构及其控制框图Fig.2 The control block diagram of converters based on unified control strategy for PV-MG
图中,KP(s)和KQ(s)分别为有功功率和无功功率补偿器,均采用PI调节器。光伏微网并网运行时,逆变器输出功率跟踪P0ref和Q0ref,有功和无功补偿器KP(s)和KQ(s)均不饱和,可等效为PQ控制;孤岛运行时,控制器KP(s)和KQ(s)自动饱和,输出功率由下垂系数决定,用于跟踪负载变化,补偿器的输出ωV和UV被限制在0值附近,此时可等效为传统的下垂控制。因此统一控制策略能够实现并网运行和孤岛运行2种模式平滑切换。
2 光伏微网逆变器控制器设计
光伏微网中的逆变器无论并网运行还是孤岛运行,电压电流环的数学模型相同,功率外环则不同。设计外环调节器参数时,应在2种模式下分别进行。本文采用根轨迹法,利用波特图(bode diagram),按照阶跃响应指标确定控制环路的参数。
2.1电压电流环设计
电压电流环均采用PI控制,其控制结构如图3所示。图中Rf为滤波电感电阻,Cf为滤波电容,ksvp为SVPWM调制的等效增益,I为滤波后电流,If为滤波电感电流,Ic为滤波电容电流。本文中ksvp=1,Lf=1 mH,Rf=0.2 Ω,Cf=20 μF。

图3 简化电压电流环控制结构Fig.3 Simplified control sturture of voltage and current loop
由于电流流经电容会产生较大延迟,可近似认为电容电压在一个开关周期内保持不变,忽略电压反馈作用,电流内环闭环传递函数为

电流内环主要控制目标是快速跟踪给定的电流指令,具有良好的抗干扰性能。本文电流环路的动态特性指标如表1所示。

表1 动态特性指标Tab.1 Dynamic performance index
电流内环中积分参数保持20不变,增大比例参数,阶跃响应曲线和根轨迹分别如图4和图5所示。随着比例参数的逐渐增加,主极点S1向左移,上升时间和调节时间增大,为了满足控制目标选用图中的蓝线为最佳阶跃响应曲线,此时KiP= 25.2,KiI=20。

图4 电流内环阶跃响应曲线Fig.4 Step response curves of current loop
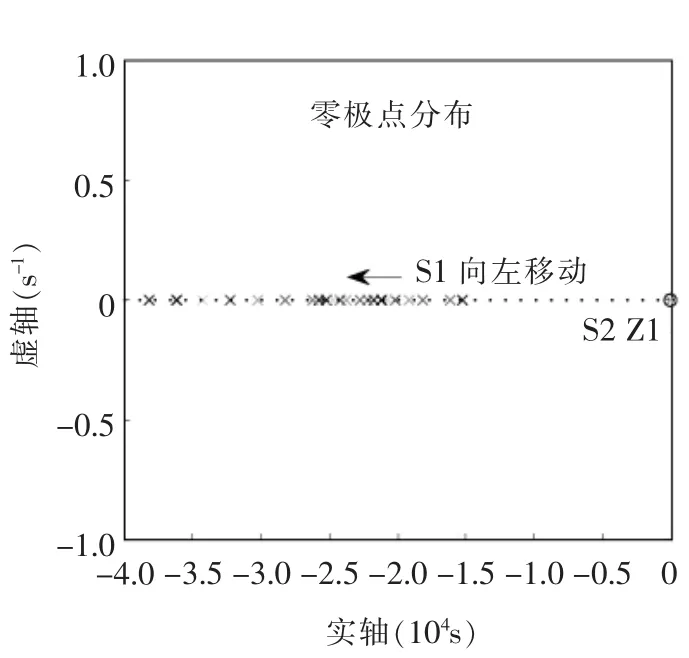
图5 电流内环根轨迹Fig.5 The root locus of current loop
将比例参数值定为25.2,改变积分参数,零极点分布和阶跃响应曲线变化幅度很小,说明了电流环的积分参数对电流回路的特性几乎没有影响,综合考虑设置KiI=20。
根据电流内环的零极点分布和阶跃响应曲线,可以得到确定了最优比例积分参数后的电流环MP%=0,tr=0.08 ms,ts=0.17 ms,此时电流内环稳定,阶跃响应快速且无超调。
图6为参数确定后电流内环的开环波特图,从图中可以看出,幅值裕度和相位裕度分别为无穷大和90.5°。根据自动控制原理,此时系统具有良好的稳定性,能满足稳定性要求。

图6 最优比例参数下电流内环的开环波特图Fig.6 The open-loop bode plot of current loop with optimal designed proportional parameter
根据整个控制系统的要求,电压外环控制系统应具有良好的跟随性和抗干扰性能,即在负载电流的扰动下,保持良好的稳态及动态性能。电压电流内环输出电压表达式为
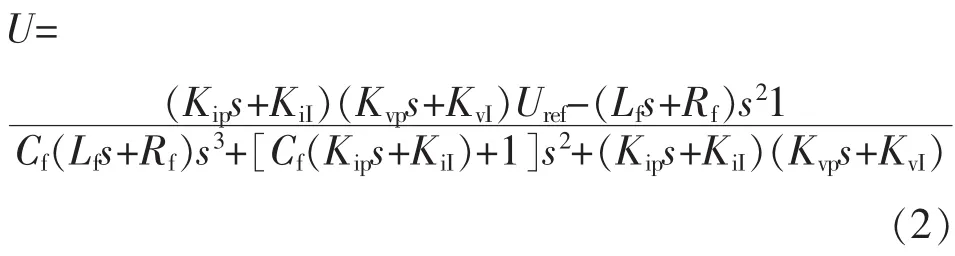
由于电压环参数优化过程与电流内环步骤类似,此处省略电压环参数优化过程。经设计,电压环PI调节器参数为Kvp=0.04,KvI=0.03,MP%=0,tr=1 ms,ts=1.8 ms,幅值裕度和相位裕度分别为无穷大和85.5°,满足稳定性要求。
光伏阵列输出功率对外界环境十分敏感,忽略功率传输过程中电力电子变换器产生的损耗,若光伏阵列输出的功率变化,负载电流也会随之波动。为了满足稳定性要求,在负载电流扰动下,电流内环控制系统仍然需要具有良好的稳定性。图7为负载电流作为扰动信号时,电压电流环的单位阶跃响应曲线。从图中可以看出,负载电流变化不影响电压环输出,满足抗干扰性能要求。
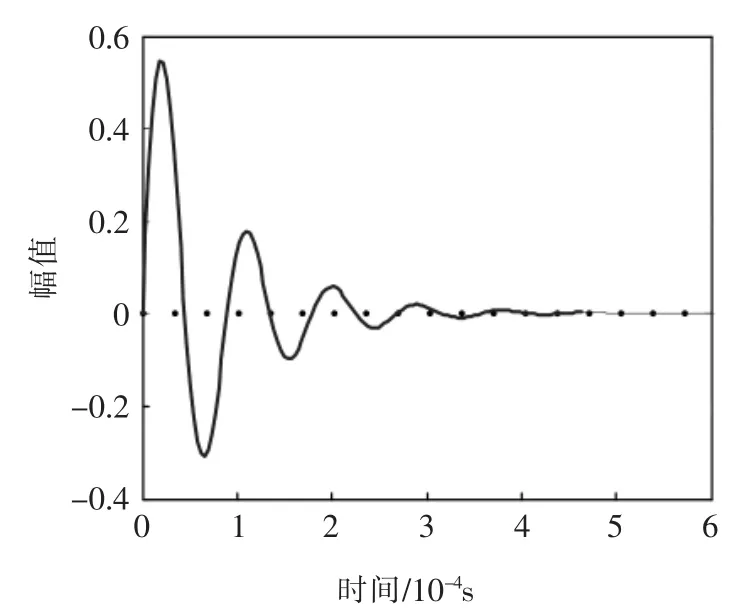
图7 电压环单位阶跃扰动响应曲线Fig.7 Step response curve of voltage loop with optimal parameters
2.2频率环设计
频率控制环如图8所示。
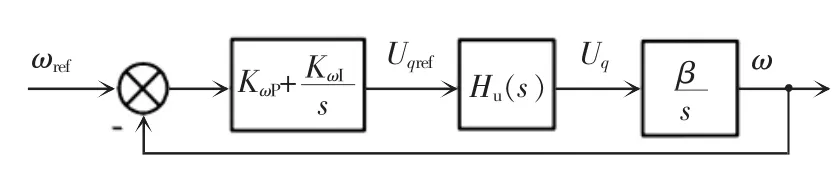
图8 并网运行时频率环控制框图Fig.8 Control block diagram of frequency loop at grid-connected mode

通过计算,频率环PI参数为KωP=150,KωI=30。
2.3功率环设计
加入PI功率补偿器后,并网和离网模式下的功率环控制结构不同,因此确定功率回路PI参数时需要分别进行。
2.3.1并网运行
(1)有功功率环
有功功率环的控制框图如图9所示。
同样采用PI调节器,其中β=5是锁相环积分参数,可以得到频率环的闭环传递函数为

图9 并网运行时有功环控制框图Fig.9 Control block diagram of active power loop at grid-connected mode
误差信号Poref-Po经由补偿器KP(s)作用得到ωV,加上ω*,减去与滤波后Po成正比的值后得到ωref。ω*为电网额定频率标幺值,通常设为1。m和τf分别为下垂系数和滤波器的时间常数,τf=0.01,g=UUPCC/Xline,有功功率环的传递函数为


图10 并网运行时有功环开环波特图Fig.10 The open-loop bode plot of active power loop
(2)无功功率环

图11 并网运行时无功环控制框图Fig.11 Control block diagram of reactive power loop at grid-connected mode
根据阶跃响应动态性能指标,选择KpP=0.44,KpI=0.2为最优参数值,此时tr=4.4 ms,ts=9.3 ms,MP=5.61%。从有功功率环的开环波特图中可得到,系统的增益裕度为14 dB,相位裕度为61.4°。
并网运行时无功功率环控制框图如图11所示。
图中h=UPCC/Xline由功率传递函数给出,根据无功功率环控制框图,得到无功功率环传递函数,即

无功环PI参数的设计过程与有功环设计类似,经过设计无功环最优参数值为KqP=0.003,KqI= 20。将确定了最优参数后的值带入传递函数中可得,tr=1.8 ms,ts=2.6 ms,MP%=0.864%,增益裕度为无穷大,相位裕度为78.8°。
2.3.2离网运行
光伏微网转为孤岛运行时,功率环的PI调节器自动饱和,功率环控制结构与并网运行时不同。
(1)有功功率环
光伏微网孤岛运行时有功环如图12所示。
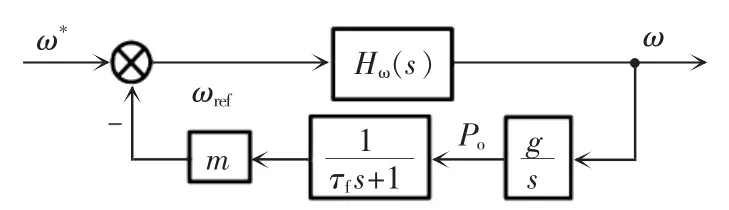
图12 孤岛运行时有功环控制框图Fig.12 The control block diagram of active power loop at islanding mode
此时有功环的传递函数为

下垂系数m也是影响系统稳定性因素之一,当下垂系数由5×10-5增加到5×10-2,根轨迹的主特征值分布如图13所示,此时根轨迹分布在图形的右半平面,系统变得不稳定。下垂系数对系统稳定性和动态性能十分重要,因此需要选择最佳的下垂系数,提高系统的稳定性[4-5]。

图13 有功环下垂系数m增加时根轨迹Fig.13 The root locus when active power droop coefficient m increases
(2)无功功率环
图14为光伏微网孤岛运行时无功功率环控制框图。无功环传递函数为

图14 孤岛运行时无功功率环控制框图Fig.14 The control block diagram of reactive power loop at islanding mode

式(4)~式(7)建立了基于统一控制策略的双模式逆变器控制器系统传递函数,通过预先设定阶跃响应的动态性能指标和稳定性限制值,下垂系数可以被限制在合适的小范围可行域内,如图15所示。
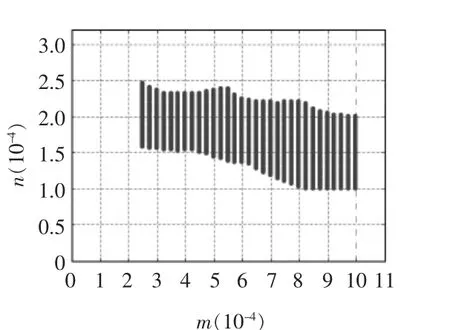
图15 光伏微网逆变器并/离网运行下垂系数最优值范围Fig.15 Optimal value range for droop coefficients of converter which adapt to grid-connected andislanding mode operation of PV-MG
3 系统仿真
光伏微网中的逆变器均采用统一控制方法,电池组可以实现功率双向流动,光伏阵列只能输出能量,光伏微电网系统详细参数如表2所示。
3.1光伏微网孤岛运行
孤岛运行时,储能电池组输出连续稳定的电压,能够稳定光伏逆变器输出电压的幅值和频率,光伏阵列和储能电池根据负载变换共同维持系统功率平衡。

表2 光伏微网系统参数Tab.2 Parameters of PV-MG system
假定光伏阵列输出最大功率,0.085 s前,电池组放电功率Pbatt=5 kW,光伏输出功率Ppv=10 kW,负载功率Pload=15 kW;0.085 s后负载功率减小到Pload=5 kW,电池组由放电状态转变为充电状态,以维持系统能量平衡,电池组此时充电功率Pbatt= 5 kW,光伏输出功率仍为Ppv=10 kW,输出功率动态性能平稳,仿真波形如图16所示。。
3.2光伏微网并网运行
并网运行时,统一控制等效为定功率PQ控制,光伏阵列和储能电池能够追踪给定功率值。光伏发电单元和储能电池组输出功率给定值及负载功率分别为P*pv=10 kW,P*batt=5 kW,Pload=15 kW。

图16 孤岛运行时光伏微网系统电压频率和输出功率波形Fig.16 The voltage,frequency and output power waveforms of PV microgrid at islanding mode
0.08 s前,光伏阵列和储能电池组输出功率总和等于负载功率,0.08 s时,负载功率增加到Pload= 20 kW,功率缺额由电网提供。0.14 s时,储能电池组的功率给定变为P*batt=10 kW。相应的电压和功率仿真波形如图17所示。由图表明这种算法在并网模式下,负载突然变化时,实现功率跟踪。

图17 并网运行时光伏微网系统电压、输出功率波形Fig.17 The voltage and output power of PVmicrogrid at grid-connected mode
3.3光伏微网并/离网切换
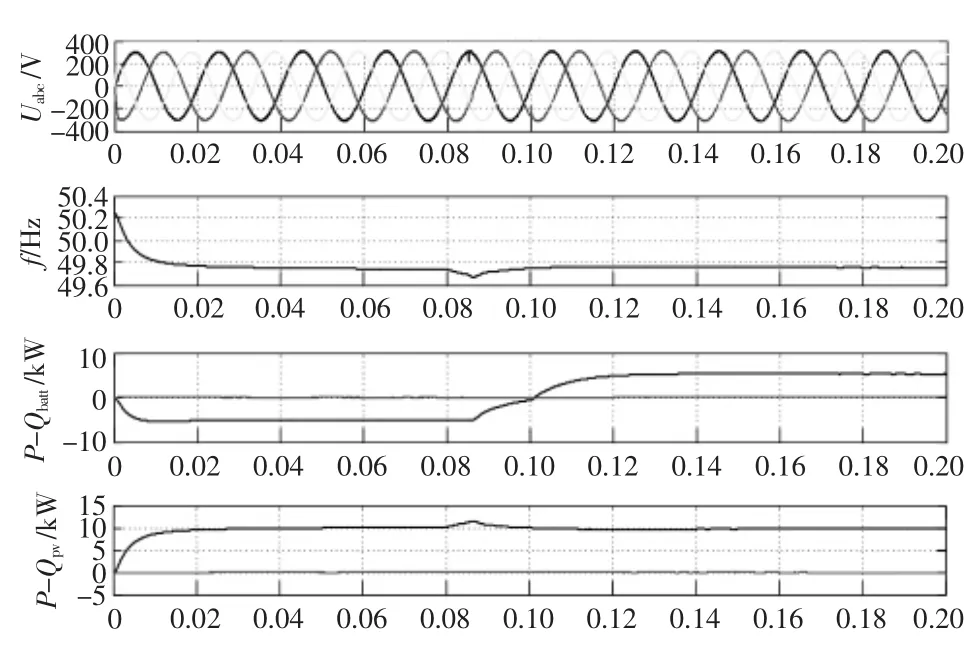
图18 离网转并网运行时光伏微网系统电压、频率和输出功率波形Fig.18 The voltage,frequency and power waveforms of PV microgrid when operation mode switched from islanding mode to grid-connected mode
光伏微网孤岛运行时,电池组充电功率为5 kW,光伏输出功率为10 kW,负载功率Pload=5 kW。0.085 s时微网由离网运行转为并网运行,光伏输出功率在10 kW附近波动,负载功率保持不变,电池组放电功率为5 kW,仿真波形如图18所示。
从图18中可以看出,运行模式切换时,逆变器输出电压和频率能够保持稳定,功率变化范围很小,系统没有发生超调。由此验证了控制器参数设计合理,光伏微网能够获得预期动态性能。
4 结语
为了实现光伏微网逆变器在并/离网两种状态下稳定运行,以及这两种模式间的平滑切换,本文对传统的下垂控制进行了改进,设计了可以达到上述目的的统一控制器。根据阶跃响应动态指标和稳定性限制条件,采用根轨迹法对控制器的参数进行了优化设计,最后通过Matlab/Simulink仿真平台对控制算法的可行性进行了验证,仿真结果证明了该算法的有效性。
参考文献:
[1]杜燕.微网逆变器的控制策略及组网特性研究[D].合肥:合肥工业大学,2013.
Du Yan. Control Strategies and Performance of Microgrid Inverters[D]. Hefei:He Fei University of Technology,2013 (in Chinese).
[2]Mao M,Huang H,Chang L. Real-time energy coordinated and balance control strategies for microgrid with photovoltaic generators[C].// Power Electronics for Distributed Generation Systems(PEDG),2013 4th IEEE International Symposium on. IEEE,2013:1-7.
[3]王晓寰,张春江.分布式发电系统无缝切换控制策略[J].电工技术学报,2012,27(2):217-222.
Wang Xiaohuan,Zhang Chunjiang. Study of control strategy for seamless transfer of grid-connecteddistributed generation systems[J]. Transactions of China Electrotechnical Society,2012,27(2):217-222(in Chinese).
[4]Zeng Liu,Jinjun Liu,Yalin Zhao. A unified control strategy for three-phase inverter in distributed generation[J].IEEE Transactions on Power Electronics,2014,29(3):1176-1191.
[5]Delghavi M B,Yazdani A. A unified control strategy for electronically interfaced distributed energy resources[J]. IEEE Transactions on Power Delivery,2012,27(2):803-812.
[6]Mao M,Liu Y,Jin P,et al. Energy coordinated control of hybrid battery-supercapacitor storage system in a microgrid [C].//Power Electronics for Distributed Generation Systems (PEDG),2013 4th IEEE International Symposium on.IEEE,2013:1-6.
[7]杨柳,王萍.基于虚拟阻抗参数优化的并联逆变器控制研究[J].电源学报,2014,12(6):73-78.
Yang Liu,Wang Ping. Parameter optimization of virtual impedance for parallel inverter[J]. Journal of Power Supply,2014,12(6):73-78(in Chinese).
[8]Wei Yao,Min Chen,Matas J,et al. Design and analysis of the droop control method for parallel inverters considering the impact of the complex impedance on the power sharing [J]. IEEE Transactions on Industrial Electronics,2011,58(2):576-588.
[9]Guerrero J M,Vasquez J C,Matas J,et al. Control strategy for flexible microgrid based on parallel line-interactive UPS systems[J]. IEEE Transactions on Industrial Electronics 2009,56(3):726-736.

茆美琴
Parameter Sensitivity Analysis of Controller Based on Unified Control Strategy in Photovoltaic Microgrid
MAO Meiqin,LI Jingjing,HUANG Hui,SHEN Yatao
(Research Center for Photovoltaic System Engineering,Hefei University of Technology,Hefei 230009,China)
Abstract:A controller based on unified control strategy for the DC/AC converters in a low-voltage photovoltaic micro-grid(PV-MG)is proposed for both grid-connected and islanding mode operation and seamless switching as well as power sharing of the PV generators,which can avoid using two different control strategies when the PV-MG operates at grid-connected or islanding mode. The unified controller is designed by combining the power PI compensator with droop control,and can realize the automatic and seamless switching between the two modes of PV-MG. According to the step response dynamic index and stability constraints,the parameters of the controller are optimized with root locus methods. The Matlab/Simulink simulation results verfy the feasibility and effectiveness of the proposed controller.
Keywords:photovoltaic microgrid(PV-MG);unified controller;root locus;dynamic index;sensitivity analysis
DOI:10.13234/j.issn.2095-2805.2016.2.121中图分类号:TM 464
文献标志码:A
收稿日期:2015-12-07
基金项目:国家重点基础研究发展计划(973计划)资助项目(2009CB219708);国家自然科学基金资助项目(51077033);国家国际合作资助项目(2014DFA70660-03);安徽省科技攻关项目(1501021049)
作者简介:
茆美琴(1961-),女,通信作者,博士,教授,博士生导师,IEEE高级会员,研究方向:电力电子技术在可再生能源发电系统中的应用、微网系统,E-mail:pvcenter @hf ut.edu.cn。
李晶菁(1992-),女,硕士研究生,研究方向:微网系统中电力电子变换技术,E-mail:lijingjing2354@163.com。
黄辉(1988-),男,硕士研究生,研究方向:微网系统中能量管理技术,E-mail:huanghui765928349@126.com。
申亚涛(1991-),男,硕士研究生,研究方向:微网系统中的电力电子变换技术,E-mail:shen_yatao@foxmail.com。
猜你喜欢
价值工程(2017年20期)2017-07-10 05:29:46
贵州财经大学学报(2017年3期)2017-06-02 10:11:42
现代商贸工业(2017年11期)2017-05-25 11:05:24
土木建筑与环境工程(2017年1期)2017-03-29 21:54:04
财会学习(2017年6期)2017-03-25 18:30:17
科技创新与应用(2017年6期)2017-03-23 21:53:05
财经理论与实践(2017年1期)2017-02-16 18:43:04
财经理论与实践(2017年1期)2017-02-16 18:42:57
商(2016年35期)2016-11-24 10:42:45
南方农业·下旬(2015年6期)2015-08-07 02:13:14
