
基于用户侧微网单相逆变器的控制器设计
2016-07-12 09:23匡洪海曾丽琼张曙云李圣清
电源学报 2016年2期
匡洪海,曾丽琼,张曙云,李圣清
(湖南工业大学电气与信息工程学院,株洲412007)
基于用户侧微网单相逆变器的控制器设计
匡洪海,曾丽琼,张曙云,李圣清
(湖南工业大学电气与信息工程学院,株洲412007)
摘要:为解决用户侧微电网单相逆变器系统输出电压的谐频问题,考虑采用双反馈控制策略来进行系统控制器设计。针对在非线性负荷条件下采用PID控制器进行用户侧微电网单相逆变器控制,不能取得满意的谐频抑制问题,提出采用电压外环路伺服系统鲁棒性控制和电流内环路滑模控制相结合的控制设计。仿真结果表明,在不同负荷条件下用户侧光伏微电网单相逆变器系统输出电压总谐波失真低,瞬态响应快和渐近跟踪基准输出电压好,谐频效应减到最小。
关键词:用户侧微网;单相逆变器;伺服鲁棒性;滑模变结构
引言
微电网在实际运行中需要解决的关键问题之一就是控制问题。当微电网中的负荷或网络结构发生变化,或者微电网外部发生故障,需要与大电网断开独立运行时,如何对微电网进行合理控制,以保证其不同运行模式下都能够满足负荷的电能质量要求,是微电网能否可靠运行的关键[1-2]。
由于目前绝大多数用电负荷属于交流负载,而微电网中的分布式光伏发电系统产生的电能是直流,不能直接与市政电网并网或直接给负载供电,故需要一种控制装置来实现微电网的多功能控制[3]。微电网中的大多数分布式发电DG(distributed generation)通过逆变器接入系统,因此对DG的控制即为对其逆变器的控制[4-5]。
目前,示范微电网工程大多仅立足于微电网拓扑结构和内部稳定,涉及用户侧微电网与配电网协调运行的研究还较少[6-7],由于用户侧微电网功率较小,可以采用单相交流供电,这样可避免负载三相不平衡等问题对逆变器冲击[8-10]。
单相逆变器中常见的电压瞬时值反馈控制方法控制电路简单[11],输出电压波形基本能满足负载的要求,但对于负载波动较大情况下控制效果不佳,而且在带非线性负载时,输出电压波形会产生比较严重的畸变,并含有大量的谐波,若采用常见的PID控制策略进行用户侧微网单相逆变器控制,则在非线性负荷条件下不能取得满意的谐频抑制[12-14],因此需对用户侧光伏微电网单相逆变器系统的谐频抑制策略进行研究。
1 用户侧微网单相逆变器系统
我国太阳光非常丰富。太阳能是我国广大内陆地区最直接便利的能源,把太阳能作为微网逆变器的输入能源,符合我国清洁能源推广条件。根据接入电网的不同,光伏微电网又分为光伏电站微电网和用户侧光伏微电网两类。
用户侧微电网的额定值是在kW级,单相逆变器是微电网的主控子系统。在光伏微电网系统中,光伏发电的接入是通过逆变器来连接的,它是功率变换的关键单元,因此逆变器的控制在整个光伏微电网系统中显得很重要。DC/AC逆变器的组成主要包括逆变桥电路、输出滤波器等,用户侧微网单相逆变器系统模型如图1所示。
利用基尔霍夫电压电流定律可以推导图1所接阻抗负荷的单相逆变器的状态空间模型,具体推导为:回路1,由KVL得;回路2,由KCL得;由KVL得
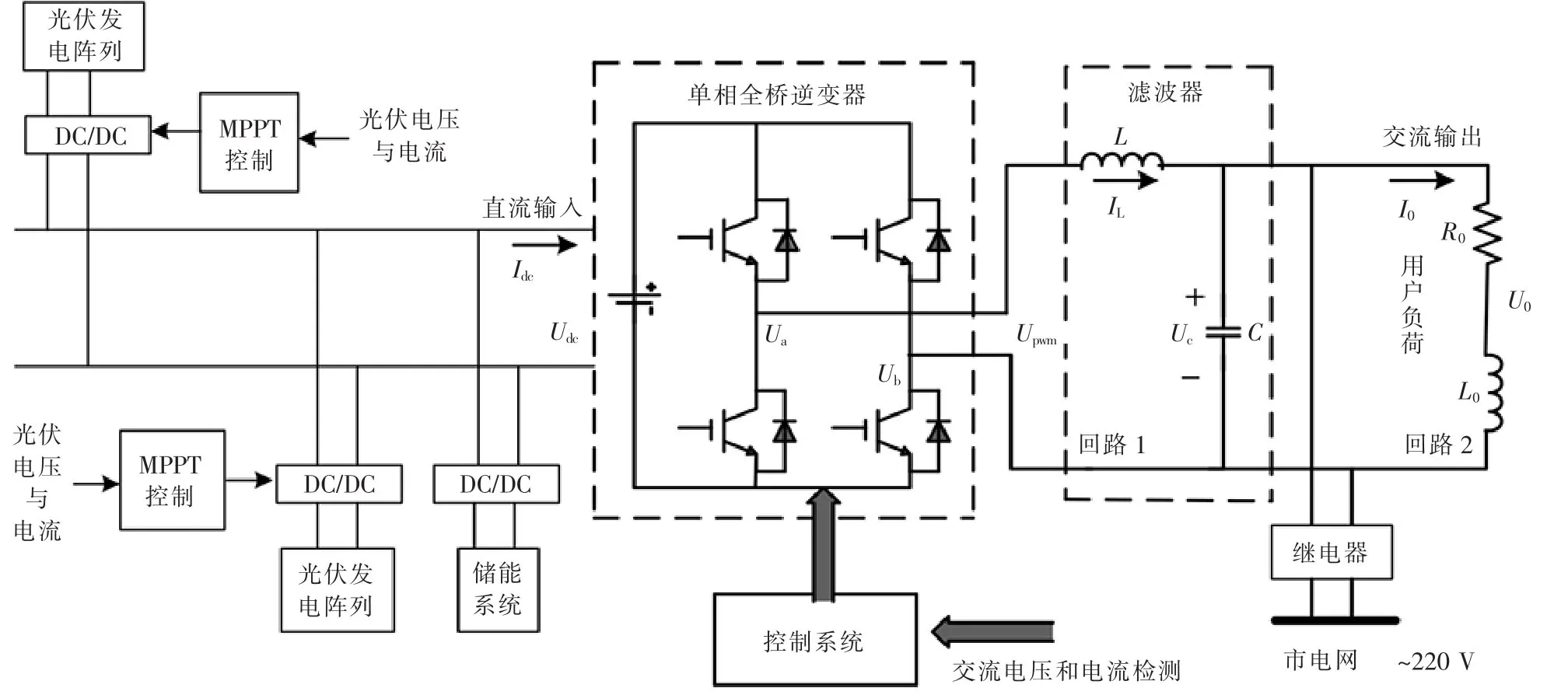
图1 用户侧单相微网逆变器系统Fig.1 Single-phase inverter system based on the user side

式中:
为将连续时间电路模型变成离散时间电路模型,需选择合适取样时间,即取样时间选为脉宽调制开关频率的倒数。因此连续时间模型可离散成式中:

对于电流的变化率远高于电压的变化率的功率逆变器系统,可设计级联的双环控制结构即电压外环路和电流内环路,电压误差信号EU=Uref-U0加到电压外环路,电压外环路控制负荷电压U0,使其跟踪50 Hz的正弦基准电压Uref,此外环路产生电流内环路的命令信号即逆变器的基准电流Iref。
2 用户侧微网单相逆变器控制方案
2.1传统的PID控制
首先考虑采用PID控制的策略来控制单相逆变器系统,PID控制器既用在电压外电路,也用在电流内环路,并在不同负荷条件下对控制设计进行测试。PID控制器在连续时域中的标准转移函数为

由式(3)可知,控制器有2个零点和1个极点,在离散时间域(z域)内,可得PID控制器的传递函数为

式中:

对于线性负荷来说PID控制器工作良好,可以使谐波减少到可接受的水平,但对非线性负荷来说,PID控制器对不需要的奇次谐频无能为力,即使增加PID控制器的增益也无法改善。
2.2伺服系统鲁棒性电压控制和滑模变结构电流控制相结合
在不同负荷条件下对控制设计进行测试可得,在非线性负荷条件下PID电压和电流控制器不能取得满意的谐频抑制。在单相逆变器中,没有偶次谐频分量,但可能存在奇次谐频分量,特别需要把系统输出中的3次谐频分量消除掉或减至最小,因为它比高次如5次、7次等谐频分量产生更大的谐频电流。为此考虑采用伺服系统鲁棒性电压控制和滑模变结构电流控制相结合的控制策略,离散时间伺服系统鲁棒性电压控制器用于电压外环路,离散时间滑模变结构电流控制器用于电流内环路,所提控制策略如图2所示。为单相逆变器专门设计的离散时间伺服系统鲁棒性电压控制器是为了把系统输出中的3次谐频分量消除或减至最小;使用滑模变结构电流控制器的主要原因是其响应速度快,没有过冲,对系统参数变化的灵敏度低。
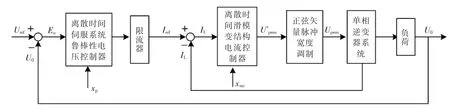
图2 单相逆变器系统伺服系统鲁棒性电压控制和滑模变结构电流控制的控制策略Fig.2 Control strategy combinated with robust servomechanism problem(RSP)control and sliding mode control for single-phase inverter system
3 伺服系统鲁棒性控制和滑模变结构控制相结合的控制设计
3.1离散时间滑模变结构电流控制设计
首先考虑不接任何负荷的单相逆变器模型来设计离散时间滑模变结构电流控制器,负荷电流I0按干扰来处理,则有

使用滑模变结构电流控制的单相逆变器连续时间模型可离散成

式中:


选择式(7)表示的滑动面,使逆变器电流IL服从电流Iref,则有

将式(6)中的y(k)代入式(7),经整理后可得

当滑模变结构控制存在时,滑动表面s(k)=0或IL=Iref。若将控制输入u(k)设计为式(9)的解,则可实现离散时间滑模变结构控制,即

从而可推导出

由此可见,式(10)所描述的ueq(k)可给出电流内控制环路中待实现的离散时间滑模控制律。
3.2直流变交流的功率变换器的方程式推导
为设计伺服系统鲁棒性电压控制器,必须知道受系统鲁棒性电压控制器控制的功率变换器。因伺服系统鲁棒性电压控制器是用在控制单相逆变器的双环路级联控制策略中的电压外环路中,则伺服系统鲁棒性电压控制器所看到的等效功率变换设备是单相逆变器系统与离散时间滑模变结构电流控制器的结合体。
式(2)代表接有负荷的单相逆变器,而式(6)代表离散时间滑模变结构电流控制器,因此必须把式(2)和式(6)结合起来,以便列出伺服系统鲁棒性电压控制器所等效功率变换设备的算式。式(10)给出的滑模变结构控制律是式(2)给出的单相逆变器的控制输入,因此将式(10)代入式(2)可得

令xsm(k)=C11xp(k),经一系列推导化简可得


因此式(12)表示使用伺服系统鲁棒性电压控制器的直流变交流功率变换器,也即使用需设计伺服系统鲁棒性电压控制器的等效功率变换器。
3.3离散时间伺服系统鲁棒性电压控制设计
在用户侧微网单相逆变器系统中,要求负荷电压在因负荷汲取电流而引起干扰的情况下,跟踪50 Hz的正弦基准电压。图1所示单相逆变器的LC滤波器能抑制开关作用所引起的高次谐频。但在逆变器的输出中会存在低次谐频分量,其产生的谐波电流会影响整个系统的性能。在单相逆变器系统可能存在的低次谐频分量中,3次谐频分量会比较高次的5次、7次谐频分量产生更大谐频电流,因此在系统输出中需将它消除或减至最小。
伺服系统鲁棒性电压控制器是由伺服补偿器和稳定补偿器两部分组成。离散时间伺服系统鲁棒性电压控制器的结构为

式中:η(k)为伺服补偿器输出;xp(k)为系统状态;K1和Kp分别为所要求的伺服补偿器增益和稳定补偿器增益。
3.3.1伺服补偿器的设计
为式(12)系统设计伺服补偿器,其伺服补偿器是一个反馈补偿器,电压误差作为它的输入。在连续时域内,伺服补偿器的方程为

式中,Eu为输入到伺服补偿器的电压误差,Eu=Uref-U0中矩阵Acon的构成取决于系统中的基准输入和干扰输入。对于单相逆变器系统来说,希望系统能跟踪基频f1=50 Hz,并将系统输出中存在的3次谐频减到最小或消除。因此单相逆变器系统的基准输入为基准频率ω1=2πf1,rad/s,干扰输入频率为ω3=2πf3,rad/s。
从而可以得到离散时间伺服补偿器为

经计算,其平均地震影响系数曲线与振型分解反应谱法所采用的地震影响系数曲线在统计意义上相符。每条时程曲线计算所得结构底部剪力均大于振型分解反应谱法计算结果的65%,且3条时程曲线计算所得结构底部剪力的平均值大于振型分解反应谱法计算结果的80%。
3.3.2扩展后系统的确定
为设计稳定补偿器,必须先得到扩大后的系统。将第3.2.1节设计好的伺服补偿器用于式(12)中给出的直流变交流的功率变换器,即可得到扩大后的系统。
将电压误差Eu=Uref-U0代入式(15),可得

式中,U0为负荷输出电压,可描述为


式中:,将式(17)代入式(16),经整理得

则式(12)和式(18)可写成

3.3.3稳定补偿器的设计
稳定补偿器的目的是将伺服补偿器用于直流变交流的功率变换器而获得扩大后的系统,可用线性最佳控制理论来设计稳定补偿器。如果用Uref≡0获得扩大后的闭环系统式稳定的,则式(19)给定的扩大后系统是稳定的。为设计最佳稳定补偿器,可令Uref≡0,于是式(19)变成

式(20)也可写为

为寻找式(21)给定扩大后系统的最佳解,可定义离散时间线性二次方程性能指数,即

本研究中的单相逆变器选ε=10-5,权重矩阵Q的选择对控制性能有重要影响,在所提的控制设计中,把3种不同增益wp、w1、wh用作直流变交流的功率变换器的状态权重。
为获得最佳控制性能权重因数的选择原则是wp选得比w1和wh小很多。为确保基频的最佳跟踪,w1应设置得比wh大很多。式(22)中定义的离散时间线性二次方程性能指数最小化的最佳控制需给定为

为获得最佳增益矩阵K=[K0K1],需解离散时间riccatti方程来求出唯一正的确定解。具有伺服补偿器增益和稳定补偿器增益的离散时间伺服系统鲁棒性电压控制器框图如图3所示。
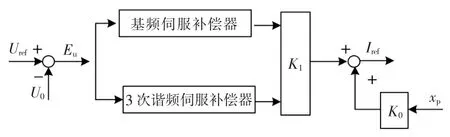
图3 离散时间伺服系统鲁棒性电压控制器框图Fig.3 Block diagram of discrete-time robust servomechanism problem(RSP)controller
4 仿真结果
针对采用电压外环路伺服系统鲁棒性控制和电流内环路滑模变结构控制相结合的控制在图1系统中的应用,本文利用Matlab进行仿真,在不同负荷条件下采用PID控制器和所提控制策略设计的控制器进行用户侧微网单相逆变器控制的仿真结果如图4~图11所示。
图4~图7为线性负荷条件下的仿真曲线,其中图4和图5分别为线性负荷下PID控制时以及伺服系统鲁棒性电压控制和滑模变结构电流控制相结合控制时的仿真结果;图6和图7分别为线性负荷下PID控制时以及伺服系统鲁棒性电压控制和滑模变结构电流控制相结合控制时系统基准电压与实际输出电压的比较。从仿真曲线可以看出:在线性负荷下,PID控制与伺服系统鲁棒性电压控制和滑模变结构电流控制相结合控制皆能使谐频减至令人满意的水平,两者皆能很好地跟踪系统基准电压。
图8~图11为非线性负荷条件下的仿真曲线,其中图8和图9分别为非线性负荷下PID控制以及伺服系统鲁棒性电压控制和滑模变结构电流控制相结合控制时的仿真结果;图10和图11分别为非线性负荷下PID控制时以及伺服系统鲁棒性电压控制和滑模变结构电流控制相结合控制时系统基准电压与实际输出电压的比较。从图8和图9的仿真曲线可以看出,在非线性负荷下,PID控制器不能将谐频降至可以接受的水平,而伺服系统鲁棒性电压控制和滑模变结构电流控制相结合的控制器能很好地抑制谐频;从仿真曲线图10和图11可以看出,在非线性负荷下,PID控制器的负荷电压并不能以令人满意的方式跟踪系统基准电压,而伺服系统鲁棒性电压控制和滑模变结构电流控制相结合的控制器却能很好地跟踪系统基准电压。

图4 线性负荷下PID控制单相逆变器时仿真结果Fig.4 Simulation results of single-phase inverter system using PID control under linear load
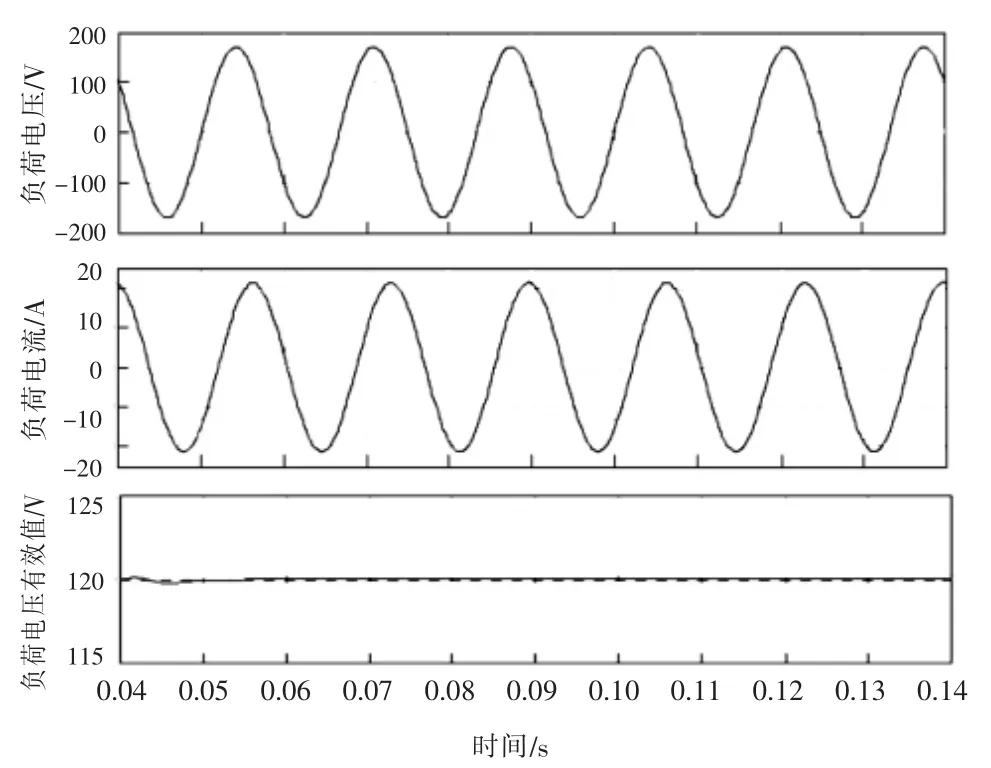
图5 线性负荷下所提控制策略控制单相逆变器时仿真结果Fig.5 Simulation results of single-phase inverter system using RSP control under linear load

图6 线性负荷下PID控制时基准电压与负荷电压的比较Fig.6 Comparison of reference voltage with actual load voltage using PID control under linear load
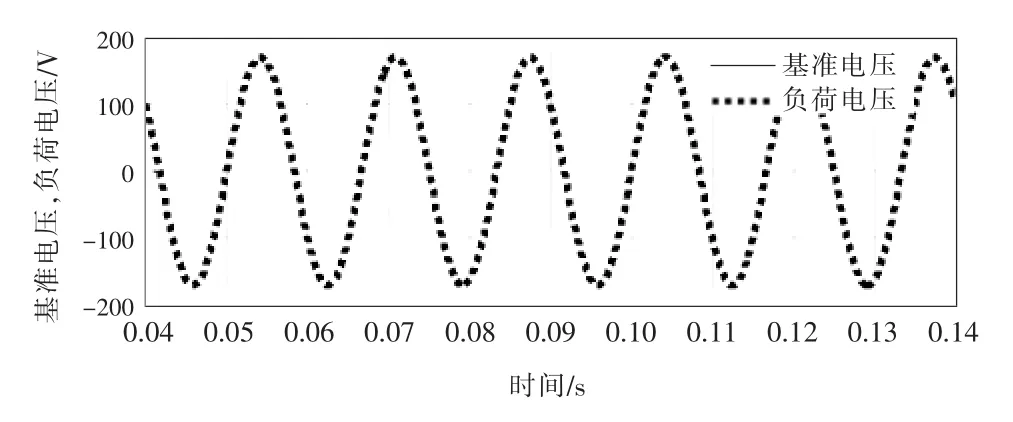
图7 线性负荷下所提控制策略控制时基准电压与负荷电压的比较Fig.7 Comparison of reference voltage with actual load voltage using RSP control under linear load
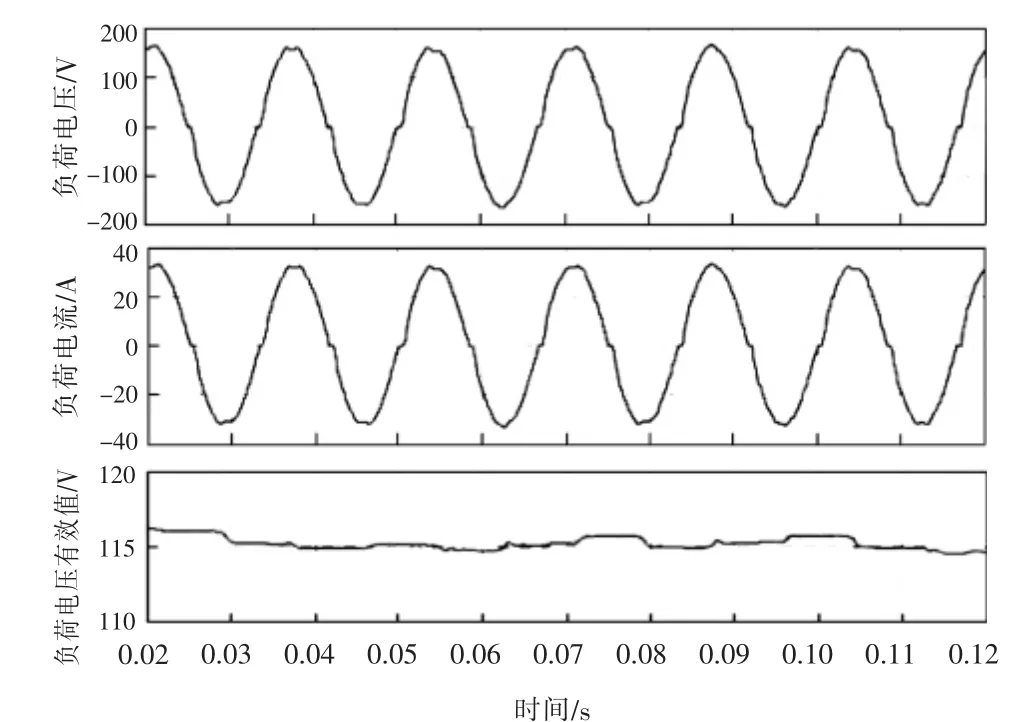
图8 非线性负荷下单相逆变器PID控制时仿真结果Fig.8 Simulation results of single-phase inverter system using PID control under nonlinear load
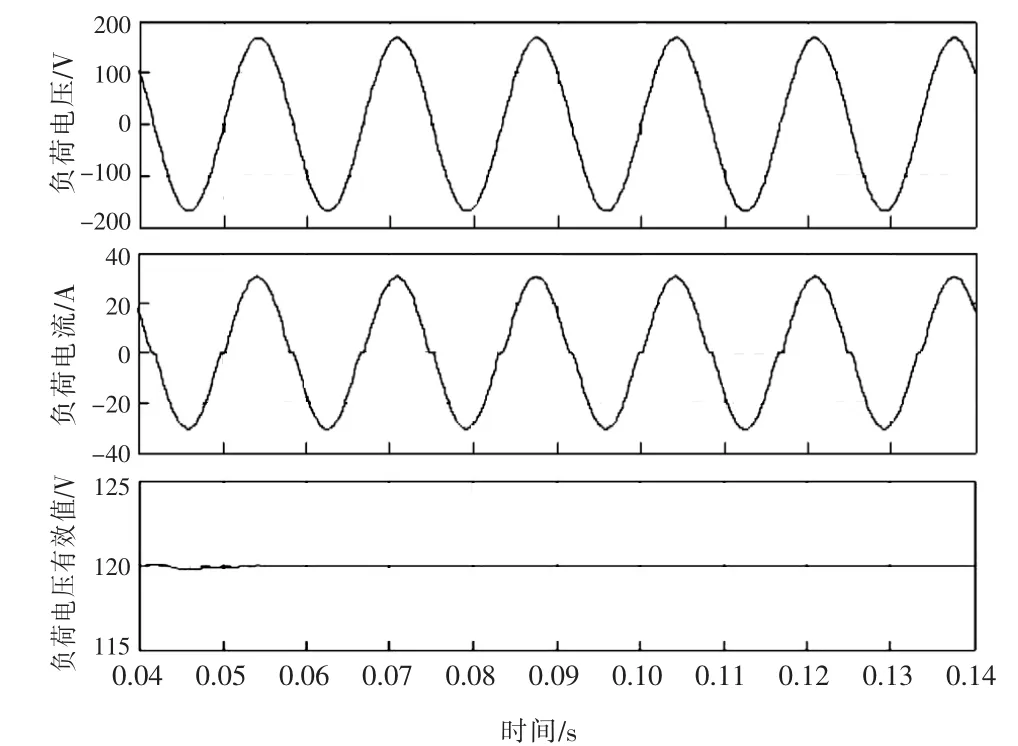
图9 非线性负荷下所提控制策略控制单相逆变器时仿真结果Fig.9 Simulation results of single-phase inverter system using RSP control under nonlinear load
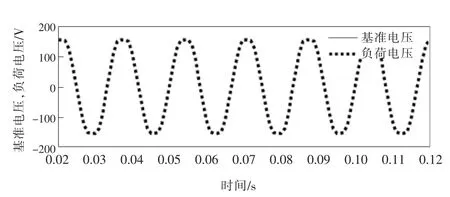
图10 非线性负荷下PID控制时基准电压与负荷电压的比较Fig.10 Comparison of reference voltage with actual load voltage using PID control under nonlinear load

图11 非线性负荷下所提控制策略控制时基准电压与负荷电压的比较Fig.11 Comparison of reference voltage with actual load voltage using RSP control under nonlinear load
5 结语
用户侧微网单相逆变器系统采用PID电压和电流控制器时,在非线性负荷条件下不能取得满意的谐频抑制,因此考虑设计伺服系统鲁棒性电压控制和滑模变结构电流控制相结合的控制器。在设计离散时间滑模电流控制器时,其负荷电流按干扰来处理,而伺服系统鲁棒性控制器是建立在内部模型和线性优化控制理论上的,因此伺服系统鲁棒性电压控制和滑模变结构电流控制相结合而设计的控制器能很好地抑制用户侧微电网单相逆变器系统的谐频;仿真结果表明,在非线性负荷下,伺服系统鲁棒性电压控制和滑模变结构电流控制相结合的控制器不仅能很好地抑制谐频,也能很好地跟踪基准电压。
参考文献:
[1]王成山,肖朝霞,王守相.微网综合控制与分析[J].电力系统自动化,2008,32(7):98-103. Wang Chengshan,Xiao Zhaoxia,Wang Shouxiang. Synthetical control analysis of microgrid[J]. Automation of Electric Power System,2008,32(7):98-103(in Chinese).
[2]王成山.微电网分析与仿真理论[M].北京:科学技术出版社,2013:34-62.
[3]张志文,席自强,周世平,等.智能功率模块在微电网中心控制器中的应用[J].电气技术,2013(4):48-51. Zhang Zhiwen,Xi Ziqiang,Zhou Shiping,et al. The application of IPM in center controller of micro-grid[J]. Electric Technical,2013(4):48-51(in Chinese).
[4]汪小平,李阳.微电网运行控制与仿真[J].中国电力,2011,22(2):73-77. Wang Xiaoping,Li Yang. Operation control and simulation analysis of a micgrid[J]. Elctric Power,2011,22(2):73-77 (in Chinese).
[5]史明明,袁晓冬,陈兵.电压暂降对光伏逆变器的影响分析[J].电源学报,2015,13(5):99-104. Shi Mingming,Yuan Xiaodong,Chen Bing. Analysis of PV inverter characteristeristics under voltage sages[J]. Journal of Power Suppy,2015,13(5):99-104(in Chinese).
[6]张先勇,舒杰,吴昌宏,等.一种海岛分布式光伏发电微电网[J].电力系统保护与控制,2014,42(10):55-61. Zhang Xianyong,Shu Jie,Wu Changhong,et al. Island microgrid based on distributed photovoltaic generation[J]. Power System Protection and Control,2014,42(10):55-61 (in Chinese).
[7]吴朋. 5 kW光伏微网逆变器的研制[D].武汉:湖北工业大学,2011. Wu Peng. Research on 5kW Photovoltaic Micro-grid Inverter[D]. Wuhan:Hubei University of Technology,2011 (in Chinese).
[8]孙向东,任碧莹,张琦,等.单相微电网逆变器的并网/离网工作模式研究[J].电力电子技术,2014,48(1):1-3. Sun Xiangdong,Ren Biying,Zhang Qi,et al. Grid-connected and off-grid modes for a single-phase micro-grid inverter[J]. Power Electronics,2014,48(1):1-3(in Chinese).
[9]Keyhani A,Marwali M. Smart Power Grids 2011[M]. Berlin: Springer Berlin Heidelberg,2012:103-264(in Chinese).
[10]Peng Shuang,Luo An,Lü Zhipeng,et al. Power control for single-phase micro-grids based on the PQ theory[C]. 2011 6th IEEE Conference on Industrial Electronics and Applications. 2011:1274-1277(in Chinese).
[11]李国庆,张馨月,陈继开,等.计及谐波影响的光伏逆变器控制方法研究[J].电测与仪表,2014,51(25):70-76. Li Guoqing,Zhang Xinyue,Chen Jikai,et al. Research on the control method of photovoltaic inverter with harmonic impact considered[J]. Electrical Measurement & Instrumentation,2014,51(25):70-76(in Chinese).
[12]唐文强,吕智林,胡立坤,等.直流微电网孤立运行控制策略研究[J].广西大学学报,2014,39(5):1027-1033. Tang Wenqiang,Lü Zhilin,Hu likun. Control strategy of isolated operation for DC micro-grid system[J]. Journal of Guangxi University,2014,39(5):1027-1033(in Chinese).
[13]Palle S,Arafat N,Sozer Y,et al. Voltage harmonic control of weak utility grid through distributed energy systems[C]. IEEE Energy Conversion Congress and Exposition,2012:1982-1989(in Chinese).
[14]Khaled M,Abo-Al-Ez,Elaiw A,et al. A dual-loop model predictive voltage control/sliding-mode current control for voltage source inverter operation in smart microgrids[J]. Electric Power Components and Systems,2014,42(1):348-359(in Chinese).

匡洪海
Controller Design of Single-phase Inverter Based on User Side Micro-grid
KUANG Honghai,ZENG Liqiong,ZHANG Shuyun,LI Shengqing
(College of Electrical and Information,Hunan University of Technology,Zhuzhou 412007,China)
Abstract:In order to solve the harmonic frequency problem of the user side micro-grid single-phase inverter system output voltage,it is considered using the double feedback control strategy to design the controller. The combined control design of outer voltage loop servo system robustness control and inner current loop sliding mode control is proposed to solve the problem of the satisfied harmonic frequency suppression can't be got that the user side micro-grid single-phase inverter system uses the PID control strategy,the simulation results show that under different load conditions make total harmonic distortion of the user side micro-grid single-phase inverter system output voltage is small,fast transient response,good asymptotically tracking the reference output voltage,harmonic frequency effect being reduced to the minimum.
Keywords:user side micro-grid;single-phase inverter;servo robustness;sliding mode sturcture
DOI:10.13234/j.issn.2095-2805.2016.2.9中图分类号:TM 464
文献标志码:A
收稿日期:2015-09-18
基金项目:湖南省教育厅科研项目(15C0395);湖南省自科基金项目(2015JJ5009);湖南工业大学教改项目(2014B17)Project Supported by Scientific Research Fund of Hunan Provincial Education Department(15C0395);Hunan Natural Science Foundation(14JJ2116);Hunan University of Technology Education Reform Project(2014B17)
作者简介:
匡洪海(1972-),女,通信作者,博士,副教授,研究方向:新能源与分布式发电、现代电力系统分析,E-mail:khhzyz@163. com。
曾丽琼(1990-),女,硕士研究生,研究方向:新能源并网技术,E-mail:3461337 07@qq.com。
张曙云(1991-),男,硕士研究生,研究方向:微网并网控制,E-mail:1286721240@ qq.com。
李圣清(1961-),男,博士,教授,研究方向:电能质量调节与控制技术,E-mail:ls q1961@sohu.com。
