枪托连续冲击作用下的人体参数辨识
2016-07-01 09:14金鑫周克栋赫雷黄雪鹰张俊斌南京理工大学机械工程学院江苏南京009463856部队吉林白城3700
兵工学报 2016年4期
关键词:生物力学
金鑫,周克栋,赫雷,黄雪鹰,张俊斌(.南京理工大学机械工程学院,江苏南京0094;.63856部队,吉林白城3700)
枪托连续冲击作用下的人体参数辨识
金鑫1,周克栋1,赫雷1,黄雪鹰2,张俊斌2
(1.南京理工大学机械工程学院,江苏南京210094;2.63856部队,吉林白城137001)
摘要:针对枪托连续冲击作用下人体系统参数随时间变化的特点,提出了一种人体物理参数辨识方法。该方法通过正交化经验模态分解和Hilbert变换构建输入和输出信号的解析信号。通过推导含参数变量的解析信号方程并计算求解获得人体参数随时间的变化曲线。表面肌电实验结果证明了该方法的有效性。辨识结果表明,该方法获得的连续冲击作用下人体等效刚度和等效阻尼参数曲线与生物学知识相符,具有重要意义。
关键词:兵器科学与技术;参数辨识;生物力学;时变系统;正交化经验模态分解;连续冲击
周克栋(1964—),男,教授,博士生导师。E-mail:zkd81151@126. com
0 引言
如何定量地描述冲击作用下的人体系统是一个十分困难的问题。文献[1]通过Kane方法,建立了人体系统和施力物体(武器)的动力学方程,利用试验测试数据计算获得了人体相关参数。文献[2]采用类似方法,通过第二类Lagrange方程建立动力学模型。文献[3]通过机械导纳方法,辨识获得人体肩部的模态及物理参数。然而,上述工作均存在一个潜在的假设,即人体物理参数是一个恒定的值,不随时间的变化而变化。
实际情况下,人体系统应该属于时变系统。尤其是当人体受到连续冲击作用时,人体系统物理参数明显存在随时间而变化的现象。根据生物学研究[4]可知,神经系统响应时间约为150~200 ms,而肌肉响应时间则在200 ms左右。因此,当冲击开始一段时间后,人体肌肉发生力的作用,宏观上表现为人体系统的物理参数随时间发生变化。
本文以人体立姿持枪连续射击为例,分析了在武器后坐力作用下人体系统的物理参数特性,提出了人体参数的辨识方法。该方法通过正交化经验模态分解(OEMD)和Hilbert变换构建解析信号,通过推导含参数变量的解析信号方程并计算获得人体参数随时间的变化曲线。通过射手表面肌电测量实验验证了方法的可靠性。实际射击试验的辨识结果亦符合生物学常识。
1 人体参数辨识方法
经验模态分解(EMD)自提出以来,被广泛应用于各类信号处理领域[5 -6]。然而,信号经EMD处理得到的内在模态函数(IMF)分量并不存在严格的正交性。大量实践[7]表明,EMD方法的正交性指标IO一般在10-2~10-3数量级,这样的近似正交性会导致信号经EMD分解产生不可知的能量泄露。因此,有学者基于EMD方法提出了OEMD方法[8]。
1. 1 OEMD方法
EMD方法在信号处理领域广为人知,因此不做赘述。本文在此主要对OEMD方法进行描述。OEMD方法的核心思想是对EMD处理得到的各阶IMF分量进行正交化处理。其具体过程如下:
2)令r1(t)= x(t)-(t)作为新信号进行EMD分解,得到第2阶初始IMF分量(t).为了得到与c1(t)严格正交的第2阶正交化IMF分量c2(t),从(t)中去除含有c1(t)的分量为

式中:β21为(t)和c1(t)之间的正交化系数。其离散形式下的表达式为

式中:N为信号长度。
3)将rj(t)= rj -1(t)-(t),j≥2作为新信号进行EMD处理,得到第j +1阶初始IMF分量(t).从中去除前j阶正交化IMF分量,得到第j +1阶正交化IMF分量为

式中:正交化系数βj +1,i的离散形式表达式为

4)重复上述过程,直至rn(t)满足EMD终止条件,OEMD处理过程结束。原始信号x(t)最终表示为

1. 2 解析方程
为了方便分析,假设人体在受到连续冲击作用时各自由度方向运动相对独立,且人体上半身作为同一刚体不发生较大变形[9]。人体在俯仰方向的运动微分方程可表示为

式中:I为人体上半身在俯仰方向的转动惯量;F(t)为作用于人体的连续冲击激励;Φ(t)为俯仰方向的角位移响应;C(t)和K(t)分别为人体随时间变化的广义等效阻尼与等效刚度。

式中:

Z(t)表示信号φ(t)的解析信号(ZF(t)的求法同理),a(t)和ψ(t)分别表示解析信号的幅值函数和相位函数。(t)表示信号(t)的解析信号。



综上所述,识别人体系统阻尼C(t)和刚度K(t)的过程[10 -15]如下:
步骤1 将人体系统在俯仰自由度方向的角位移、角速度、角加速度响应信号以及冲击作用激励信号分别做OEMD处理,获得:φj(t)、(t)、(t)以及fj(t),根据(9)式分别构造相应的解析信号:(t)、(t)、(t)以及(t).
步骤3 对整个时间长度t为0~T重复上述过程,即可获得人体系统阻尼和刚度随时间的变化曲线C(t)和K(t).
2 试验及辨识结果
本文以立姿无依托持枪连续射击情况下的人体作为研究对象,以95-1式自动步枪作为试验用枪,进行了参数辨识试验。试验采用美国Dytran-1050C型压电式力传感器测试武器冲击作用力,采用XSENS MTi-10型陀螺仪测试人体在冲击作用下的动态响应。试验照片如图1所示。试验重复多次,一致性较好。选取其中一次5发连续射击试验的俯仰自由度方向数据进行参数辨识。本文同样对人体的扭转和收展自由度方向进行了辨识,结果与俯仰自由度方向结果类似。但由于后文肌肉电信号试验中无法从生物学知识中明确知晓影响扭转和收展自由度方向等效阻尼和等效刚度的肌肉位置,故而无法有效证明辨识结果。因此,本文仅对俯仰自由度方向进行讨论。
试验获得的输入激励如图2(a)所示,获得的输出角加速度、角速度和角位移响应曲线分别如图2(b)、图2(c)和图2(d)所示。
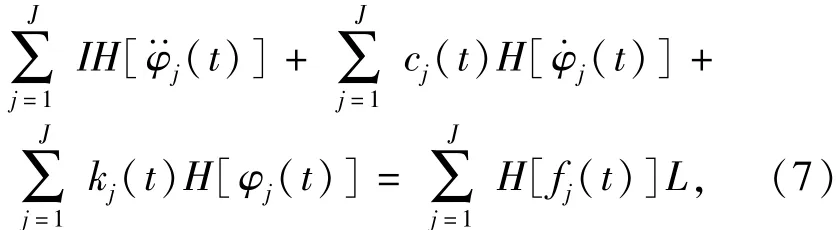
辨识过程中,由国家标准GB 1000—88“中国成年人人体尺寸”可知,人体转动惯量I =0.283 977 kg·m2,同时测量可得冲击作用力的力臂L =0. 692 m.对输入和输出信号进行一定的处理以消除零值偏差带来的影响,即保证射击开始前F(t)和Φ(t)等值均为0.人体系统俯仰自由度方向刚度和阻尼的辨识结果分别如图3(a)和图3(b)所示。

图1 射击试验照片Fig. 1 Photo of shooting experiment
值得注意的是,图3中辨识结果的等效刚度和等效阻尼为广义的等效刚度和等效阻尼参数,其幅值的物理意义为:已知刚度/阻尼的幅值为相应的力与角位移/角速度的比值。如果在t时刻系统的瞬时力与瞬时角位移/角速度方向相反,则此时系统的瞬时刚度/阻尼值为负,反之为正。
由图2已知射击开始于0. 2 s时刻,结束于0. 7 s时刻前后,对应图3中0. 2 s时刻前后人体系统的等效刚度和等效阻尼开始发生变化,在0. 7 s时刻前后基本结束变化。其中,图3(a)表明人体系统的等效刚度于0. 38 s时刻前后发生极大的突变,因为此时人体腹部肌肉在控制神经作用下用力产生弹性刚度导致角位移变化突然减小,宏观反映为人体等效刚度的突然增大。人体系统等效刚度在达到第一个极大值后一段时间内恢复到零值附近,其后又于0.55 s时刻前后(第一次后约0.2 s)达到第二个极大值,表明人体腹部肌肉通过弹性刚度对射击姿态的调整作用是分段的,而非连续的。
同样,图3(b)表明,人体系统的等效阻尼在0. 4 s时刻前后有一次较为明显的波动变化,而后在0. 55 s时刻前后达到突变的最大值,反应了人体腰部肌肉在此过程中产生力的作用,以弹性阻尼的形式阻碍人体产生较大的角位移变化。人体系统的等效刚度和等效阻尼的变化趋势与生物学人体肌肉响应时间200 ms基本相符。整个射击过程人体肌肉作用方式与经验射手的主观感觉相符。
3 试验验证
为了证明表示结果的可靠性,本文进行了连续射击情况下人体肌肉的表面肌电信号(sEMG)测量试验,如图4所示。试验测量了射击过程中射手腰部后侧肌肉和腹部肌肉的sEMG信号,分别如图5(a)和5(b)所示。

图2 输入激励和输出响应曲线Fig. 2 Curves of input force,output angle,angular velocity and angular acceleration
试验观察可以发现,射手腰部后侧肌肉sEMG信号与人体刚度辨识结果,以及腹部肌肉sEMG信号与人体阻尼辨识结果,有着类似的变化趋势。同时幅值明显的极大值点对应出现在0. 38 s和0. 55 s附近,具有良好的一致性。生物力学分析认为[16],人体等效刚度和阻尼与肌肉力间存在内在的因果联系。文献[17]认为:腹部肌肉主要用于降低躯体对载荷响应的频率和振幅,这与阻尼器的效果近似;而腰部竖脊肌的作用在于增加躯干紧张度,这与弹簧的效果近似。因此,辨识结果与sEMG信号近似是有其生物力学内因的,本文辨识方法亦是有效且可靠的。
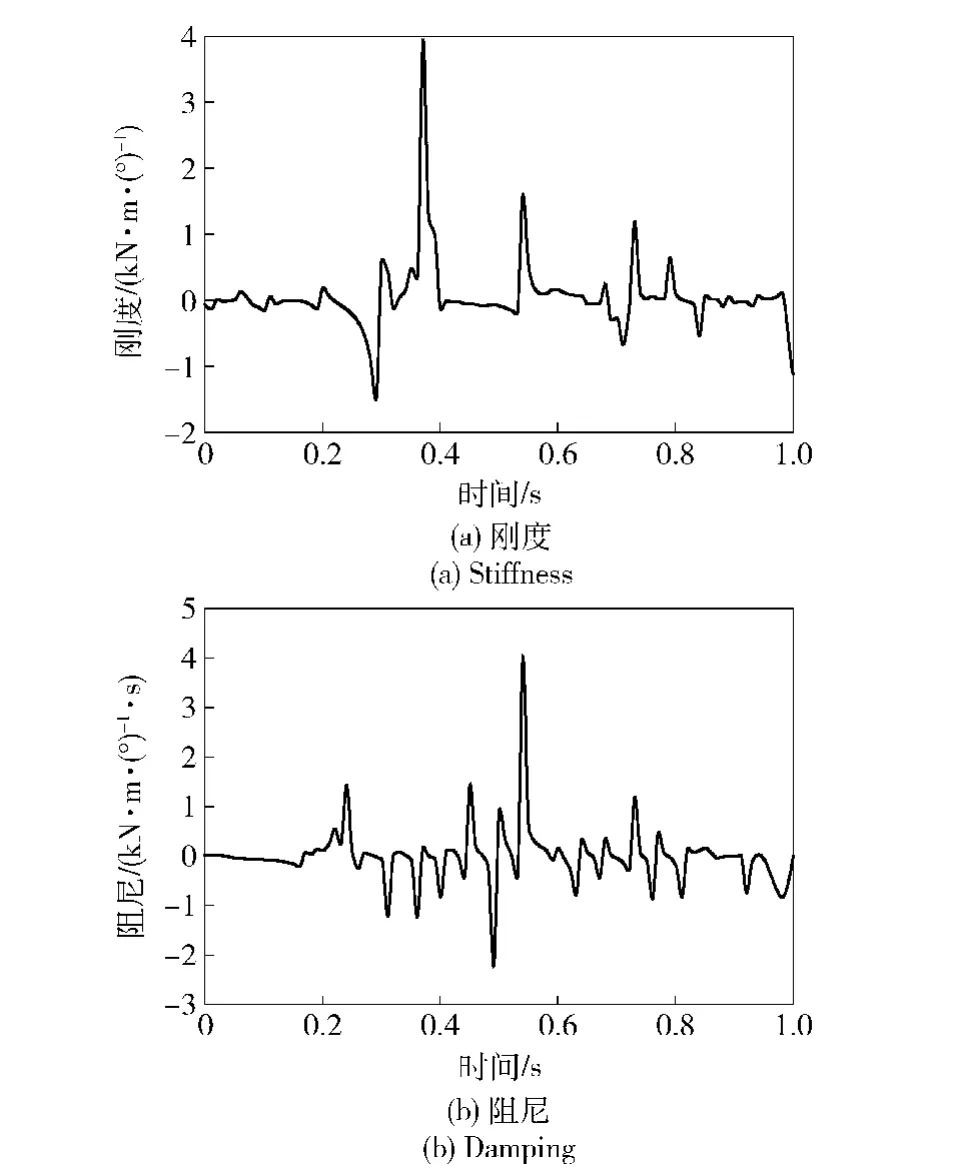
图3 人体阻尼和刚度辨识结果Fig. 3 Identification results of human damping and stiffness

图4 人体肌肉的表面肌电信号测量试验照片Fig. 4 Photo of shooter muscles sEMG measurement
4 结论
1)本文提出了基于OEMD方法的人体时变参数辨识方法。辨识结果表明,射击过程中人体的等效阻尼和等效刚度参数不是一个恒定值,而是一个随时间变化的参数。射击过程中人-枪系统为一个时变系统。
图5 射手表面肌电信号测量结果Fig. 5 Results of shooter muscles sEMG measurement
2)辨识获得的人体等效阻尼和等效刚度时变参数可用于求解人-枪模型的动力学方程系数,使得现有多自由度、多刚体人-枪模型适用于连续射击情况。
3)本文所提方法对分析人体在其他受力情况下的时变参数辨识具有参考价值,因此本文方法具有一定普适意义。
4)基于真实试验数据进行了人体阻尼和刚度的参数辨识,辨识结果对自动武器及相关领域的设计研究具有参考意义。
参考文献(References)
[1] 李永新,朱明武,孙海波,等.人枪系统动力响应研究[J].兵工学报,1999,20(1):8 -12. LI Yong-xin,ZHU Ming-wu,SUN Hai-bo,et al. Dynamic research of man-weapon system[J]. Acta Armamentarii,1999,20(1):8 -12.(in Chinese)
[2] 包建东,王昌明,何云峰.人-枪模型的建立及仿真分析[J].兵工学报,2009,30(5):513 -517. BAO Jian-dong,WANG Chang-ming,HE Yun-feng. Foundation of man-gun model and simulation analysis[J]. Acta Armamentarii,2009,30(5):513 -517.(in Chinese)
[3] 孔德仁,孙海波,李永新,等.枪肩系统机构导纳分析[J].南京理工大学学报,1997,21(5):441 -444. KONG De-ren,SUN Hai-bo,LI Yong-xin,et al. Mechanical admittance analysis of rifle-shoulder system[J]. Journal of Nanjing University of Science and Technology,1997,21(5):441 - 444. (in Chinese)
[4] 王亚平,徐诚,郭凯.人枪系统建模及数值仿真研究[J].兵工学报,2002,23(4):551 -554. WANG Ya-ping,XU Cheng,GUO Kai. Modeling and digital-simulation of a human-gun system[J]. Acta Armamentarii,2002,23(4):551 -554.(in Chinese)
[5] Huang N E,Shen Z,Long S R,et al. The empirical mode decomposition and the Hilbert spectrum for nonlinear and non-stationary time series analysis[J]. Proceedings of the Royal Society A-Mathematical Physical and Engineering Sciences,1998,454(1971):903 -995.
[6] 李鸿光,孟光.基于EMD方法的混沌信号中周期分量的提取[J].应用数学和力学,2006,27(2):199 -203. LI Hong-guang,MENG Guang. Harmonic component extraction from a chaotic signal based on EMD method[J]. Applied Mathematics and Mechanics,2006,27(2):199 -203.(in Chinese)
[7] Huang N E,Shen Z,Long S R. A new view of nonlinear water waves:the Hilbert spectrum[J]. Annual Review of Fluid Mechanics,1999,31(1):417 -457.
[8] 楼梦麟,黄天立.正交化经验模式分解方法[J].同济大学学报:自然科学版,2007,35(3):293 -298. LOU Meng-lin,HUANG Tian-li. Orthogonal empirical mode decomposition[J]. Journal of Tongji University:Natural Science,2007,35(3):293 -298.(in Chinese)
[9] 胡敬坤.轻武器射击平台的初步研究[D].南京:南京理工大学,2007. HU Jing-kun. Preliminary research of small arms firing platform [D]. Nanjing:Nanjing University of Science and Technology,2007.(in Chinese)
[10] 徐晴晴.基于改进经验模态分解的线性系统参数识别问题研究[D].南京:南京航空航天大学,2013. XU Qing-qing. Parameters identification for linear structures based on an improved EMD method[D]. Nanjing:Nanjing University of Aeronautics and Astronautics,2013.(in Chinese)
[11] Liu K. Identification of linear time-varying systems[J]. Journal of Sound and Vibration,1997,206(4):487 -505.
[12] Yang J N,Lei Y,Pan S,et al. System identification of linear structures based on Hilbert Huang spectral analysis. Part 1:normal modes[J]. Earthquake Engineering and Structural Dynamics,2003,32(10):1443 -1465.
[13] Shi Z Y,Law S S. Identification of linear time-varying dynamical systems using Hilbert transform and empirical mode decomposition method[J]. Journal of Applied Mechanics,2007,74(2):223 -230.
[14] Cohen L. Time-frequency analysis:theory and applications [M]. New York:Prentice Hall,1995.
[15] Tözeren A. Human body dynamics:classical mechanics and human movement[M]. New York:Springer-Verlag,1999.
[16] Panjabi M M. The stabilizing system of the spine. Part I:function,dysfunction,adaptation and enhancement[J]. Journal of Spinal Disorders,2015,5(4):383 -397.
[17] Vera-Garcia F J,Brown S H,Gray J R,et al. Effects of different levels of torso co-activation on trunk muscular and kinematic responses to posteriorly applied sudden loads[J]. Clinical Biomechanics,2006,21(5):443 -455.
Parameter Identification of Human Body under Successive Impact
JIN Xin1,ZHOU Ke-dong1,HE Lei1,HUANG Xue-ying2,ZHANG Jun-bin2
(1. School of Mechanical Engineering,Nanjing University of Science and Technology,Nanjing 210094,Jiangsu,China;2. 63856 Unit of PLA,Baicheng 137001,Jilin,China)
Abstract:A parameter identification method of human body under successive impact is proposed,considering the variation of the parameters over time. Orthogonal empirical mode decomposition(OEMD)and Hilbert transform are used in the method to build the analytic signals of input and output signals. The equation of analytic signals with variable parameters is derived,and the human body parameters changing with time are calculated. Surface electromyography experimental results show that the proposed method is effective. Identification result shows that the equivalent stiffness and equivalent damping parameters of human body under successive impact obtained in this paper are consistent with biology.
Key words:ordnance science and technology;parameter identification;biodynamics;time-varying system;orthogonal empirical mode decomposition;successive impact
中图分类号:O32
文献标志码:A
文章编号:1000-1093(2016)04-0598-05
DOI:10. 3969/ j. issn. 1000-1093. 2016. 04. 004
收稿日期:2015-08-05
基金项目:总装备部31基地技术研究项目(2014年)
作者简介:金鑫(1987—),男,博士研究生。E-mail:jay12337@ hotmail. com;
猜你喜欢
现代仪器与医疗(2017年1期)2017-03-29
风湿病与关节炎(2017年2期)2017-03-14
湖南大学学报·自然科学版(2016年10期)2016-11-30
湖南大学学报·自然科学版(2016年8期)2016-10-08
湖南大学学报·自然科学版(2016年2期)2016-03-15
医学信息(2015年7期)2015-03-20
医学信息(2015年6期)2015-03-17
中国现代医生(2015年1期)2015-03-11
中国当代医药(2014年4期)2014-03-03