改善移动终端测量精度的卡尔曼滤波算法
2016-06-27 02:03:37吕伟才蒋法文杭玉付朱亚洲陈小轶
导航定位学报 2016年2期
吕伟才,蒋法文,杭玉付,朱亚洲,杨 旭,陈小轶,汪 洋,汪 泽
(1.安徽理工大学 测绘学院,安徽 淮南 232001;2.淮南矿业(集团)有限责任公司,安徽 淮南 232001)
改善移动终端测量精度的卡尔曼滤波算法
吕伟才1,蒋法文2,杭玉付2,朱亚洲1,杨旭1,陈小轶1,汪洋1,汪泽1
(1.安徽理工大学测绘学院,安徽 淮南232001;2.淮南矿业(集团)有限责任公司,安徽 淮南232001)
摘要:针对开采沉陷监测中常规RTK测量精度偏低的问题,结合开采沉陷监测的特点,以煤矿开采沉陷自动化监测系统的实时数据采集终端系统2 min内各历元采集的坐标及精度为基础,构建卡尔曼滤波模型,以进一步改善移动终端测量精度。利用地表移动观测站的实测数据,通过与常规RTK测量、水准测量结果的比较分析,结果表明滤波后的测量精度得到了较好的改善。从内部符合精度来看,滤波RTK测量的平面位置平均测量精度约为±0.3 cm,高程方向平均测量精度约为±0.5 cm,完全满足开采沉陷监测的精度要求;与水准测量成果相比,高程方向平均外部测量精度约为±0.8 cm,基本满足开采沉陷监测的精度要求。
关键词:开采沉陷监测;移动终端;RTK测量;卡尔曼滤波;精度分析
0引言
《煤矿测量规程》要求,矿区的第一个回采工作面必须建立开采沉陷监测地表移动观测站(以下简称地表移动观测站),通过重复性的数据采集、处理和分析来掌握开采引起的地表移动变形特征与规律,为满足煤矿安全生产、恢复与重建矿区生态环境及研究重复采动时的地表移动变形规律提供基础资料。在建立地表移动观测站的过程中,涉及到连接测量、全面观测、巡视测量、日常观测等阶段的数据采集工作[1],特别是全面观测和日常观测阶段的数据采集工作更为频繁。在监测点较多的情况下(如,顾桥煤矿11171首采面地表移动观测站含18个控制点和174个监测点)[2-4],采用常规方法就需要组织大量的人力物力来实施,建立观测站的成本居高不下。
对于矿山开采沉陷监测,要求相邻两期间平面点位相对中误差≤±2 cm,最弱点高程中误差≤±1 cm,以保证解算的开采沉陷的关键参数(如边界角、移动角等)的精度。这就要求一次测量的平面点位相对中误差≤±1.4 cm,最弱点高程中误差≤±0.7 cm。虽然从外业数据采集速度上来说,目前有多种技术,如连续运行参考站(continuously operating reference stations,CORS)系统、测量机器人、3维激光扫描等可以达到这一要求,但对于开采沉陷监测而言,这些手段还难以推广应用。如与常规实时动态(real-time kinematic,RTK)定位相比,CORS RTK技术具有数据采集速度快、精度高的特点,在20 km范围内公认的平面位置精度约±2 cm,高程精度约±3 cm[5-6]。这种测量精度(特别是高程方向的精度)还难以满足开采沉陷监测的要求,同时对目前的矿区来说,还没有全面建立网络CORS系统的条件。
为解决当前开采沉陷数据采集技术手段落后、效率低、信息化程度低等问题,淮南矿业(集团)有限责任公司与安徽理工大学、南京科博空间信息科技有限公司联合开展“地表移动自动化监测系统研究”项目,其研究内容之一是结合煤矿开采沉陷监测的特点,研究集成CORS和移动地理信息系统(geographic information system,GIS)的高精度快速数据采集终端系统。地表移动自动化监测系统共布设1个基准站(PYDCDP)、9个连续实时监测站(CORS1~CORS9)和约60个非连续实时监测站(地表移动观测站中的监测点)[7]。其中:PYDCDP布设于矿区办公楼顶,提供监测基准及差分数据;CORS1~CORS9分别布设于观测线关键部位,采用连续实时监测、定时实时监测模式;非连续实时监测站采用CORS RTK监测模式,也可采用全站仪、数字水准仪的测量模式。
在“地表移动自动化监测系统研究”项目中,为提高移动终端的CORS RTK测量的精度,特别是高程方向的测量精度,采用了事后卡尔曼(Kalman)滤波算法。目前Kalman滤波被广泛地应用于各种动态测量系统中,特别是在变形监测[8-9]、动态数据处理[10-11]、全球定位系统(global positioning system,GPS)定位定轨等方面的应用更为多见。基于Kalman滤波的RTK 测量算法讨论的较多,但一般是以虚拟参考站的虚拟观测值和移动站的实测观测值为基础,通过快速解算模糊度来实现的[12-14]。本文在介绍对常规CORS RTK测量获得的测点位置序列进行滤波的基本原理基础上,通过与常规CORS RTK测量、水准测量结果的比较分析,获得滤波CORS RTK测量的精度信息,为采用Kalman滤波算法的移动终端进行开采沉陷监测提供参考依据。
1Kalman滤波方程
采用地表移动自动化监测系统的移动终端进行CORS RTK测量时,各测点每一历元的主要测量信息包括点名、参考坐标系下的平面坐标(x,y)、拟合高程h、WGS-84大地坐标(B,L,H)、平面坐标中误差和拟合高程中误差。对某一测点进行了多次测量(如30次)时,Kalman滤波算法的主要思路为:首先将各历元在WGS-84坐标系下的大地坐标转换为高斯平面坐标,并利用Kalman滤波模型进行滤波,获得滤波后的高斯平面坐标和大地高;然后利用连接测量建立的坐标系统转换模型和高程系统转换模型,获得各历元在参考坐标系下(如1954北京坐标系)下的坐标和拟合高程(如1985国家高程基准下的高程);最后取各历元转换后的平面坐标和高程的平均值并进行精度评定。
1.1Kalman滤波的状态方程
采用CORS RTK测量获得的测点3维坐标(WGS-84坐标系下高斯平面直角坐标和大地高)序列中,将t时刻测点i的3维坐标ξi(t)和3维速率λi(t)作为状态向量,将其瞬时加速率Ωi(t)看作随机干扰,则有以下微分关系式[14]
(1)
记i点的状态向量为Xi(t)(在本文中,用X、Y、Z表示测点3维坐标),即:

(2)

(3)
则式(1)可写成
(4)
式中0和E分别为3阶零矩阵和3阶单位阵。对式(4)进行拉普拉斯变换并将其离散化,可得Kalman滤波的状态方程为

(5)
式中:Δtk=tk+1-tk;tk和tk+1分别为第k历元和第k+1历元的观测时刻。将式(5)记为

(6)
式(6)即为采用CORS RTK模式进行动态监测时,动态系统的Kalman滤波状态方程。
1.2Kalman滤波的观测方程
利用CORS RTK测量监测点的3维位置时,采用的是虚拟参考站(virtual reference stations,VRS)技术。移动站开机启动后,先向控制中心发送一个概略位置信息,控制中心接收到该位置信息后,利用基准站(PYDCDP)的观测数据在移动站附近模拟出一个虚拟参考站,整体地改正全球卫星导航系统(global navigation satellite system,GNSS)的轨道误差以及大气折射引起的误差;在此基础上摸拟出高精度的虚拟观测信息并发给移动站。虚拟参考站与移动站构成短基线,从而高精度、快速地解算出移动站的3维位置及相关精度信息[15]。
本文所讨论的Kalman滤波的观测方程,是以VRS技术解算的流动站的3维坐标为观测值,而不是以虚拟参考站的虚拟观测值和移动站的实测观测值为依据。这是因为:一方面,在进行CORS RTK测量时,一般不保留移动站的实测观测值;另一方面,以3维坐标为观测值时有利于Kalman滤波的快速实施。
以CORS RTK测量获得的监测点3维位置为观测值时,某一监测点i在第k+1个历元的观测方程为
Li/k+1=ξi/k+1+Δti/k+1λj/k+1+Δi/k+1。
(7)
式中:Δti/k+1=ti/k+1-tk+1;ti/k+1为监测点i在第k+1历元的观测时刻;tk+1为监测点i本次测量时所有历元(如30个历元)观测的中心时刻。
采用CORS RTK技术进行开采沉陷地表移动变形监测的目的之一,是在保证测量精度的前提下尽量缩短作业时间,如一个测点的测量时间不超过2 min。此时Δti/k+1不超过1 min,对于开采沉陷监测而言,在如此短的时间内,地表下沉速度是可以忽略不计的。
状态方程(6)和观测方程(7)共同构成了监测点3维位置序列的Kalman滤波模型

(8)
式中:Φk,k-1为k-1到k历元的转移矩阵;Γk,k-1为系统噪声矩阵;Ωk-1为k-1历元的系统噪声;Bk为k历元系统的观测矩阵;Δk为k历元系统的观测噪声;Xk为k历元的系统待估状态参数;Lk为k历元系统的观测向量矩阵;Xk和Lk均为监测点的3维位置和速度向量。
2位置序列的Kalman滤波算法
2.1Kalman滤波递推公式
与式(8)相应的Kalman滤波递推公式为

(9)
式中I为单位矩阵,并有

(10)
式中:X(k/k-1)为一步预测值;DX(k/k-1)为一步预测方差阵;Jk为状态增益矩阵;Ek为预测残差。
式(9)和式(10)即为监测点空间位置序列的Kalman滤波递推计算公式。在按一定方法确定了系统的初始状态后,利用新的观测值(下1个历元测点的空间位置)即可求得新的状态参数滤波值。
2.2滤波初值的确定
从Kalman滤波方程可以看出,要确定动态系统在tk时刻的状态,首先必须知道系统的初始状态,即应赋给系统初值。
1)状态参数初值的确定。
对于CORS RTK测量获得测点空间位置的动态系统而言,状态参数为测点的3维坐标和速度。由于此处的Kalman滤波是采用事后处理模式,因此:3维坐标的初值可取为测点各历元3维位置的平均值;3维速度的初值可取为相邻历元间3维位置变化的平均值。若某一测点观测了n个历元,则有

(11)
式中以X分量为例,有:

即状态参数初值为

(12)
2)方差阵初值的确定。
某一历元观测噪声的方差阵DΔ, 即CORSRTK测得的测点该历元3维位置的方差阵,由该历元3维位置的中误差mX、mY、mZ确定,即
(13)
状态参数中的3维位置的初始方差阵,可由CORS RTK测得的测点各历元3维位置的中误差平均值确定,即
(14)
式中:
由协方差阵传播定律,状态参数中的3维速率的初始方差阵为
Dλ0=2Δt-2Dξ0。
(15)
式中△t为相邻历元间的采用间隔,则状态参数的初始协方差阵为
(16)
3)动态噪声的初始方差阵。
当以测点的3维位置和瞬时速率作为状态参数时,则瞬时加速率为动态噪声,根据协方差阵传播定律,其方差阵为
DΩ(0)=4Δt-4Dξ0。
(17)
这样,利用CORSRTK测量获得测点3维位置序列即可获得系统的初始状态;然后利用式(9)和式(10)对此3维位置序列进行滤波。
3试验与结果分析
3.1试验简介
为验证本文提出的滤波算法的正确性,于2014-11-17在研究区的潘一东区1252(1)首采工作面观测站和12421(1)综采面观测站的部分监测点(共45点)上进行试验。试验时,分别采用1台LeciaSprinter150数字水准仪和1台套CORSRTK移动终端(采用兼容BDS/GPS的接收机)进行外业数据采集。采用CORSRTK测量时,每点观测30次以上。

对于RTK测量,坐标系统转换和高程系统转换参数采用连接测量阶段的成果。观测时,要求对中杆对点准确、立杆稳定,两人配合,一人对点,一人采集数据;每点观测2min,采样率为2s,当观测条件较差时(如树底下),适当延长时间。
对于RTK测量,分别采用常规数据处理方法和本文提出的滤波处理方法。采用常规数据处理方法时,取各测点所有观测历元的平均值并进行精度评价;采用滤波方法,数据处理方法参见第一节所述“Kalman滤波算法的主要思路”。
3.2数值结果与分析

(18)
对于滤波RTK测量,若某一测点i观测了n个历元,取各历元滤波后平面坐标(分量)和高程的平均值为该测点的最终成果,即:
则平均值中误差为:
有

(19)
从表1和表2中可以看出:对于RTK测量本身的精度而言,与常规RTK测量相比,采用本文提出的Kalman滤波RTK测量,其平面位置精度和高程位置精度得到了大幅度的提升(约提高了4倍);同时精度分布更为均匀,即滤波后各点的测量成果更为稳定和可靠。这就为获得稳定的正常高提供了基础。
表3中列出了这45个测点上滤波RTK高程测量、常规RTK高程测量与水准测量高程测量之间结果差异的统计信息,图1绘出了该差异图形。

表1 RTK测量平面精度统计信息

表2 RTK测量高程精度统计信息
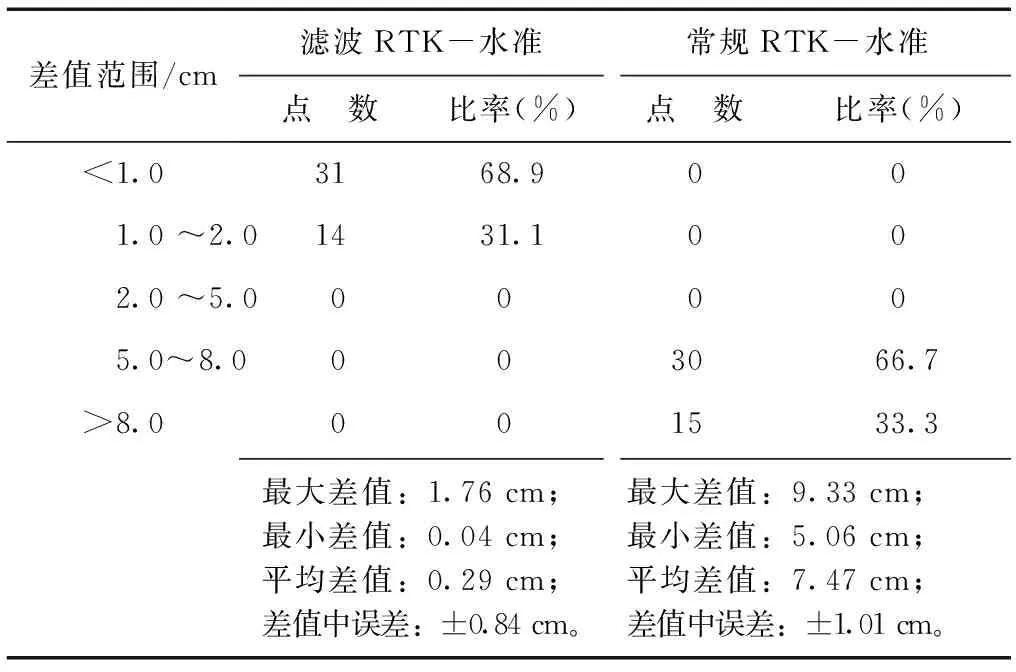
表3 高程测量差值统计信息
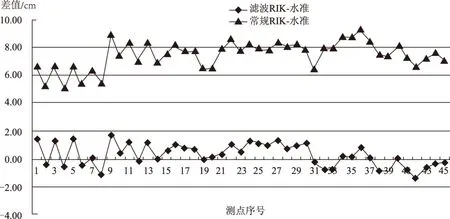
图1 RTK高程测量与水准测量的差异
从表3和图1可以看出,对于本次试验而言:
1)对于常规RTK测量,其转换后的正常高与水准测量成果相比,差异很大,且这种差异存在系统性,最大相差约10 cm,平均差值约8 cm,差值中误差约1 cm,难以满足开采沉陷监测对高程测量的精度要求。
2)对于滤波RTK测量,与常规RTK测量相比,除其内部精度得到大幅度提升外(参见表1和表2),其转换后的正常高的精度也得到了大幅度的提高,且消除了常规RTK高程测量的系统性误差。其转换后的正常高与水准测量成果相比,差异较小,最大相差约1.8 cm,平均差值约0.3 cm,差值中误差约0.9 cm。从中误差来看,略超过要求的±0.7 cm,基本满足开采沉陷监测对高程测量的精度要求。
3)对于滤波RTK测量,与水准测量高程相比,差值在±0.7 cm以内的点有21个,占46.7%,差值在±1.0 cm以内的约占70%以上,差值在±1.5 cm以内的点有44个,占97.7%,极少出现差值超过±1.5 cm的情况。这说明滤波RTK高程测量,具有较好的稳定性和可靠性。
4结束语
在“地表移动自动化监测系统研究”项目中,为提高实时数据采集终端系统采用CORS RTK测量模式获得的各测点空间位置(特别是高程)信息的精度和可靠性,结合开采沉陷监测的特点,本文建立了Kalman滤波算法,对RTK测量获得的测点空间位置序列进行进一步处理。研究区域的实测数据表明:采用Kalman滤波RTK测量,其平面位置精度和高程位置精度得到了大幅度的提升(约为常规RTK测量的4倍);同时精度分布更为均匀,即滤波后各点的测量成果更为稳定和可靠。这就为获得稳定的正常高提供了基础。
对于开采沉陷监测,为确定移动变形边界,要求平面点位相对中误差不超过±1.4 cm,边界部分最弱点高程中误差不超过±0.71 cm。对于本试验的滤波RTK测量而言,平面位置精度平均不超过±2.5 mm,最大不超过±5.0 mm,完全满足开采沉陷监测对平面位置测量的精度要求;对于滤波RTK高程测量,与水准测量高程相比,高程差值的中误差为±0.84 cm,与±0.71 cm相接近。若为确定正确的移动变形边界,该种算法还需要进一步改进;但对于沉陷区的非边界区域测量,滤波RTK高程测量仍可以获得良好的监测成果,这就为高效、快速采集移动变形信息提供了技术保障。
影响滤波RTK高程测量精度的因素主要有RTK测量本身的精度(平面和高程)、天线相位中心偏差、测区高程(似大地水准面)拟合模型的精度、观测条件等,特别是前2种因素,这是后续改进中需要考虑的主要问题。
参考文献
[1]何国清,杨伦,凌赓娣,等.矿山开采沉陷学[M].徐州:中国矿业大学出版社,1991:53-56.
[2]余学祥,秦永洋,孙兴平,等.相邻工作面综合地表移动观测站的设计与连接测量[J].大连大学学报,2008,29(6):74-79.
[3]余学祥,秦永洋,孙兴平,等.顾桥煤矿11-2煤综采面地表移动变形基本特征分析[J].矿山测量,2009(12):8-12.
[4]余学祥,邓蓉蓉,张美微,等.基于似单差法的井筒沉降监测试验与结果分析[J].合肥工业大学学报:自然科学版,2012,35(6):804-808.
[5]马洪滨,孙军,周海壮,等.鞍山市连续运行参考站系统建设与定位精度分析[J].导航定位学报,2013,1(1):89-95.
[6]吴文坛,田挚,李哲,等.河北CORS在大比例尺倾斜航空摄影测量中的应用[J].测绘通报,2013(2):63-66.
[7]蒋法文,刘可胜,杭玉付,等.煤矿开采沉陷自动化监测实时数据采集终端系统研究[J].矿山测量,2014(5):93-97.
[8]余学祥,吕伟才.GPS监测网动态数据处理抗差Kalman滤波模型[J].中国矿业大学学报,2000,29(6):553-557.
[9]余学祥,吕伟才.抗差卡尔曼滤波模型及其在GPS监测网中的应用[J].测绘学报,2001,30(1):27-31.
[10]杨元喜.动态Kalman滤波模型误差的影响[J].测绘科学,2006,31(1):17-18.
[11]尹航,朱纪洪,周池军,等.基于Kalman预报观测器的增量动态逆控制[J].清华大学学报:自然科学版,2014,54(12):1534-1538,1543.
[12]柯福阳,王庆,潘树国.网络RTK长基线模糊度解算方法研究[J].大地测量与地球动力学,2012,32(5):72-77.
[13]徐彦田,程鹏飞,蔡艳辉,等.单频RTK动态解算的卡尔曼滤波算法研究[J].测绘科学,2012,37(4):43-44.
[14]LV Weicai,XU Shaoquan.Kalman filtering algorithm research for the deformation information series of the similar single-difference model[J].Journal of China University of Mining and Technology,2004,14(2):189-194.
[15]余学祥,吕伟才,柯福阳,等.煤矿开采沉陷自动化监测系统[M].北京:测绘出版社,2014:192-217.
Kalman filter algorithm for improving mobile terminal measurement accuracy
LV Weicai1,JIANG Fawen2,HANG Yufu2,ZHU Yazhou1,YANG Xu1,CHEN Xiaoyi1,WANG Yang1,WANG Ze1
(1.School of Geomatics,Anhui University of Science and Technology,Anhui Huainan 232001,China;2.Huainan Mining Group Co.,Ltd.,Anhui Huainan 232001,China)
Abstract:For conventional RTK measurement accuracy is lower in mining subsidence monitoring,according to the characteristics of the coal mining subsidence monitoring,and basing on the coordinate and it’s accuracy collected by the real-time data acquisition terminal system of the coal mining subsidence monitoring automation system,in order to further improve the mobile terminal measurement accuracy,the kalman filtering model was built.Using the measured data of surface movement observation station,and comparing with the results of the conventional RTK measurement and levelling measurement,the filtered measuring accuracy got better improvement.From the internal accuracy of filtering RTK measurement,the plane measurement average accuracy could be up to±0.3 cm,and the height measurement average accuracy was about ±0.5 cm.This internal accuracy could fully meet the accuracy requirement of mining subsidence monitoring.Comparing with the results of the filtering RTK measurement and levelling measurement,the height measurement external accuracy was about ±0.8 cm,which basically meet the accuracy requirement of mining subsidence height monitoring.
Keywords:mining subsidence monitoring;terminal system;RTK surveying;Kalman filter;accuracy analysis
收稿日期:2015-08-12
基金项目:国家自然科学基金资助项目(41474026);淮南矿业(集团)有限责任公司资助项目(HNKY-JTJS(2013)- 28);安徽省国土资源厅科技资助项目(2011-K -22;2011-K-18) 。
第一作者简介:吕伟才(1965—),女,山东青岛人,副教授,硕士生导师,研究方向为GNSS测量与数据处理。
中图分类号:P228.1
文献标志码:A
文章编号:2095-4999(2016)02-0047-06
引文格式:吕伟才,蒋法文,杭玉付,等.改善移动终端测量精度的卡尔曼滤波算法[J].导航定位学报,2016,4(2):47-52.(LV Weicai,JIANG Fawen,HANG Yufu,et al.Kalman filter algorithm for improving mobile terminal measurement accuracy[J].Journal of Navigation and Positioning,2016,4(2):47-52.)DOI:10.16547/j.cnki.10-1096.20160210.
猜你喜欢
北京航空航天大学学报(2017年9期)2017-12-18 07:12:25
黑龙江教育学院学报(2016年11期)2016-12-23 21:10:10
电子技术与软件工程(2016年20期)2016-12-21 11:03:45
人间(2016年27期)2016-11-11 17:32:55
现代经济信息(2016年19期)2016-10-20 18:32:28
科技视界(2016年11期)2016-05-23 20:13:06
电脑知识与技术(2016年8期)2016-05-19 14:24:15
电脑知识与技术(2016年8期)2016-05-19 14:14:00
科技资讯(2015年33期)2016-05-12 21:41:15
电源技术(2016年9期)2016-02-27 09:05:39