基于矩形特征的无空间参考DEM图像模糊匹配
2016-06-20 09:04:24杨彦通杨武年吴晓萍佘金星
物探化探计算技术 2016年2期
关键词:分类器
杨彦通,杨武年,石 磊,吴晓萍,佘金星
(成都理工大学 国土资源部地学空间信息技术重点实验室,成都 610059)
基于矩形特征的无空间参考DEM图像模糊匹配
杨彦通,杨武年*,石磊,吴晓萍,佘金星
(成都理工大学国土资源部地学空间信息技术重点实验室,成都610059)
摘要:多源、多时相与多尺度DEM的匹配是DEM(Digital Elevation Model)应用中的关键技术。对无空间参考的DEM进行匹配时,若特征点不足或匹配DEM之间的分辨率、地形特征等差异较大,已有的DEM匹配技术往往难以成功。为此,这里提出了基于矩形特征的模糊匹配方法。首先利用矩形特征构建了五种图像相似度指标BRFSI并统计分析了各个指标的分类性能;然后,使用Gentle AdaBoost算法对大量样本进行训练后,得到了用于判定“匹配”与“非匹配”的分类器;最后建立了进行DEM图像模糊匹配的匹配模型。经过四种典型数据验证,该方法很好地解决了无空间参考DEM匹配中特征点不足、DEM之间相似度较低的难点问题,为进一步的DEM精匹配提供了良好的初始条件。
关键词:矩形特征;无空间参考DEM;Gentle AdaBoost算法;分类器;图像模糊匹配
0引言
地理位置无疑是数字高程模型必不可少的基础信息。由于技术、人文以及历史等诸多因素,导致很多DEM数据空间参考不完整甚至完全缺失,使这些数据的应用变得极其困难。因此需要使用多源、多时相和多尺度DEM匹配技术,对空间参考缺失的DEM和具有完整空间参考的基准DEM进行匹配,从而确定无空间参考DEM的空间位置。
然而,已有DEM匹配研究[1-4]多是针对具有完整空间参考信息的数据而进行的,无法用于无空间参考DEM的定位。基于改进SURF算子的特征点匹配方法[5-6]在一定程度上可以解决无空间参考DEM的定位问题,但该方法要求DEM图像特征点足够多,且待匹配DEM与基准DEM的相似度较高。当DEM图像特征点不足或匹配与待匹配DEM之间的分辨率、地形特征等差异较大时,上述方法则很难成功。
为此,这里提出了基于矩形特征的无空间参考DEM图像模糊匹配方法。利用矩形特征构建了五种图像相似度指标,通过使用这些相似度指标对无空间参考DEM图像与具有完整空间参考的基准DEM图像进行模糊匹配来确定其概略空间位置,为进一步的DEM精匹配提供了良好的初始条件。
1基于矩形特征的图像相似度指标
1.1矩形特征
矩形特征即Haar特征,最早由Paul Viola和Michael Jones[7-8]提出,主要是为了解决人脸检测过程中人脸特征的描述问题。由于矩形特征反映了图像局部的灰度变化情况,比单纯的像素级描述表达的信息要有效的多,对噪声、光照等更具鲁棒性,且计算方便[9],提出后便被广泛用于人脸检测[10]、手势识别[11]、车辆检测[12-13]、虹膜检测[14]等领域。
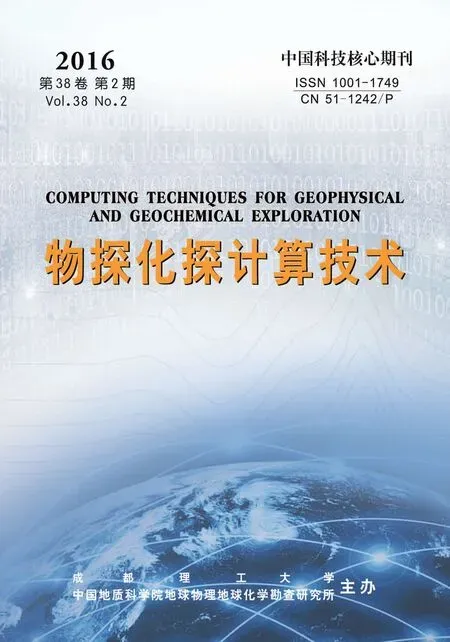
矩形特征的特征模板一般由两个或多个具有相同尺寸和形状的矩形组成,模板中的矩形有白色和灰色两种,两种颜色的矩形依次交错排列。矩形特征值被定义为白色矩形对应图像区域像素和减去灰色矩形对应图像区域像素和。常见的五种类型的矩形特征模板如表 1所示,其中,a、b为两矩形特征可以反映图像中的边缘特征,c、d为三矩形特征可以反映图像中的水平和垂直方向的线性特征,e为四矩形特征可以反映图像中的对角特征。
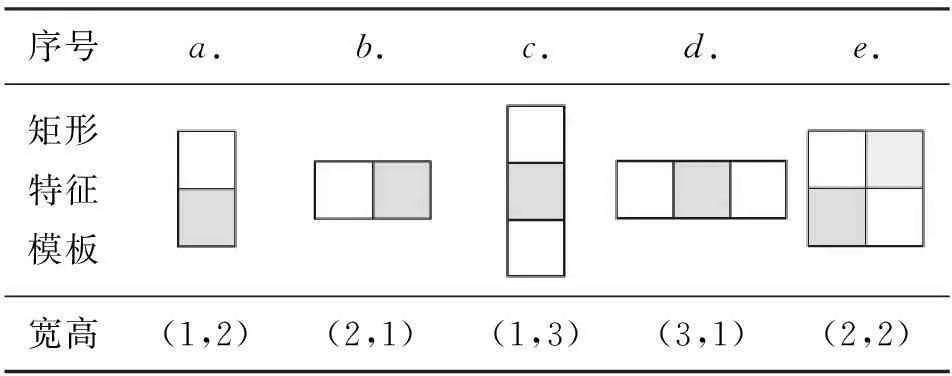
表1 矩形特征类型Tab.1 Types of rectangle features


表2 24*24的图像子窗口内的矩形特征数目Tab.2 The number of rectangle features in A 24*24 image sub window
(1)
1.2BRFSI的定义
DEM有野外实测、地形图数字化、摄影测量立体观测、合成孔径雷达干涉测量和激光扫描等多种不同的生产获取技术方法[16]。进行多源、多时相和多尺度DEM间的匹配时,待匹配DEM与基准DEM之间往往存在较大差异,若使用精确的图像相似度指标来衡量两者之间的相似性,匹配成功率一般较低。因此,允许待匹配DEM图像之间有一定程度差异的模糊匹配技术对实现多源、多时相DEM之间的匹配具有重大意义。矩形特征不像单纯的像素级指标那样“视野太小”且过于精确,它反映了图像局部的灰度变化情况,能够在一定程度上表示边缘、线段、对角线等简单图形结构特征,能够容纳匹配图像之间细微的差异,对噪声、光照等引起的图像灰度变化更具鲁棒性,在二分类问题上表现良好[8],因此,作者将矩形特征用于DEM之间的模糊匹配,提出了基于矩形特征值的匹配图像相似度指标BRFSI(Similarity Indicator Based on Rectangle Features)。
若表 1中a、b、c、d、e五种类型的矩形特征模板依次对应序号1、2、3、4、5,则基于第i(i=1,2,…,5)种矩形特征模板的BRFSIi的定义如式(2)所示。
(2)

DEM之间的模糊匹配问题本质上也是二分类问题,即判定待匹配DEM与基准DEM中特定区域“匹配”与“非匹配”的问题。如图 1所示,假设基准DEM中与待匹配DEM对应的区域为正确匹配区域C,DEM模糊匹配的目标是在基准DEM中找出区域C。为了实现该目标,我们定义搜索模板区域T及待匹配DEM图像重采样后的区域R(且使得wr=wt、hr=ht)。考虑基准DEM比例尺比待匹配DEM小的一般情况,令wt、ht的初始值分别为wt=w0、ht=h0,由基准DEM图像的左上角开始,依次从基准DEM中取出与模板区域T重合的区域判断其是否与区域R匹配,若“非匹配”则不断移动模板区域T的位置直至搜索完全图;如果仍未找到正确匹配区域,则说明当前模板区域T的尺寸不正确,减小搜索模板区域T的宽高wt、ht并对待匹配DEM图像再次重采样使得wr=wt且hr=ht后重复上述搜索与判断过程,直至找到正确匹配区域C,此时wr=wt=wc、hr=ht=hc。对于基准DEM比例尺比待匹配DEM大的情况,只需要将上述过程中减小搜索模板区域T宽高wt、ht的操作变为增大即可。
如表2所示,虽然以第i类矩形特征模板为原型的矩形特征数目众多,但由于不同的待匹配DEM具有不同的特征(DEM的特征主要体现为山顶点、谷底点、山脊线、山谷线和鞍部等),特征类型、特征数量及特征位置都不相同,不像人脸、虹膜等有类型、数量和位置都相对固定的特征,因此,这里只选取覆盖区域与模板区域T相重合的那个矩形特征,即矩形特征的尺寸满足条件m*wrf=wt且n*hrf=ht(其中,wrf、hrf为第i类矩形特征模板的宽高,m、n为正整数)。

图1 DEM图像模糊匹配与二分类问题Fig.1 The relationship between fuzzy matching of DEMimage and two-category
1.3BRFSI的计算
计算图像相似度指标BRFSI的关键是求矩形特征的值,Paul Viola和Michael Jones[7-8]将积分图引入矩形特征的计算,使得可以快速地在几乎相同的时间内完成任意尺寸和各种类型矩形特征值的计算。一幅图像的积分图拥有与该图像相同的宽高,积分图中某点p(x,y)的灰度值II(x,y)是原图像中点(x,y)左上部分所有像元灰度值的累加和,若i(x,y)为原图像上点(x,y)的灰度值,则II(x,y)的值如式(3)所示。

(3)
图2 矩形特征值计算示意图Fig.2 Diagram of calculating the value of rectangle feature(a)原图像;(b)积分图
如图 2所示,以表 1中a类矩形特征值f(x1)的计算为例,若sum(A)表示原图像中A区域所有像元灰度值之和(对区域B、C、D、E、F也依次类推),II(i)(i=1,2,…,6)表示积分图中点i的灰度值,则有:
f(x1)=sum(D)- sum(F)
又
sum(D)=II(4)- II(3)- sum(B)
sum(F)=II(6)- II(5)-(sum(B) + sum(D))
sum(B)=II(2)- II(1)
sum(B) + sum(D)=II(4)- II(3)
sum(D)=II(4)- II(3)-(II(2)- II(1))
整理可得
f(x1)=II(1)-II(2)- 2*II(3) + 2*II(4) + II(5)-II(6),只需从积分图中取出点i(i=1,2,…,6)的灰度值,即可快速计算f(x1)的值。
2基于BRFSI的模糊匹配模型
在前面提出了基于矩形特征值的匹配图像相似度指标BRFSI,且只选取覆盖区域与模板区域T相重合的那个矩形特征,则对于重采样区域R与模板区域T是否匹配的每次判断操作,都可以计算出这两个区域的包含五个值的一组图像相似度指标(BRFSI1,BRFSI2,BRFSI3,BRFSI4,BRFSI5),但是仅有这几个指标还不能判断区域R与T是否匹配,这里采用Gentle AdaBoost算法来建立“匹配”与“非匹配”的判别模型。
2.1Gentle AdaBoost算法
AdaBoost算法最早由Yoav Freund和Robert E.Schapire[17-18]提出,其核心思想是对同一个训练样本集,经过多次循环迭代训练出若干个不同的弱分类器(弱分类器是指分类错误率仅比随机猜测稍低的分类器,也即分类错误率稍低于50%),然后按一定的规则将弱分类器组合成分类正确率很高的强分类器。该算法在机器学习、数据挖掘以及识别和分类等领域发挥了重要作用[19],经不断研究和改进,目前主要有Discrete AdaBoost、Real AdaBoost、Gentle AdaBoost等不同形式[20],Rainer Lienhart等[21]人对几种主要形式的AdaBoost算法进行了对比,证明Gentle AdaBoost通常比前两种形式的算法表现更好,可以有效地避免过拟合现象(即为了对训练所使用的样本数据得到较好的分类结果而训练过度,反而导致分类器对现实数据分类能力较差),因此,作者选择Gentle AdaBoost来训练“匹配”与“非匹配”的分类器。Gentle AdaBoost算法流程如下[20,22]:
1)给定一个训练样本集
{(x1,y1),(x2,y2),…,(xn,yn)}(n为样本个数),xi为第i个样本,yi∈{-1,1},yi=-1表示该样本为负样本(非匹配),yi=1表示该样本为正样本(匹配)。
2)对训练集中的每个样本,初始化其权重为wi=1/n(i=1,2,…,n,n为样本个数)。

弱分类器Fm(x)的定义为:
(i=1,2,…,n)
(4)

在已确定权重分布的情况下,训练弱分类器的算法如下:
1)若M为图像相似度指标个数(本文中M=5),n为正样本与负样本总个数。
2)循环,for m=1,2,…,M,①若BRFSI[n]用于存储所有样本在当前图像相似度指标下的值,θ表示当前图像相似度指标的分类阈值,SquareError为当前图像相似度指标对该训练样本集在当前权重分布情况下的最小加权均方误差,并初始化SquareError为最大的浮点数;②对BRFSI[n]从小到大排序;③循环,forj=1,2,…,n;



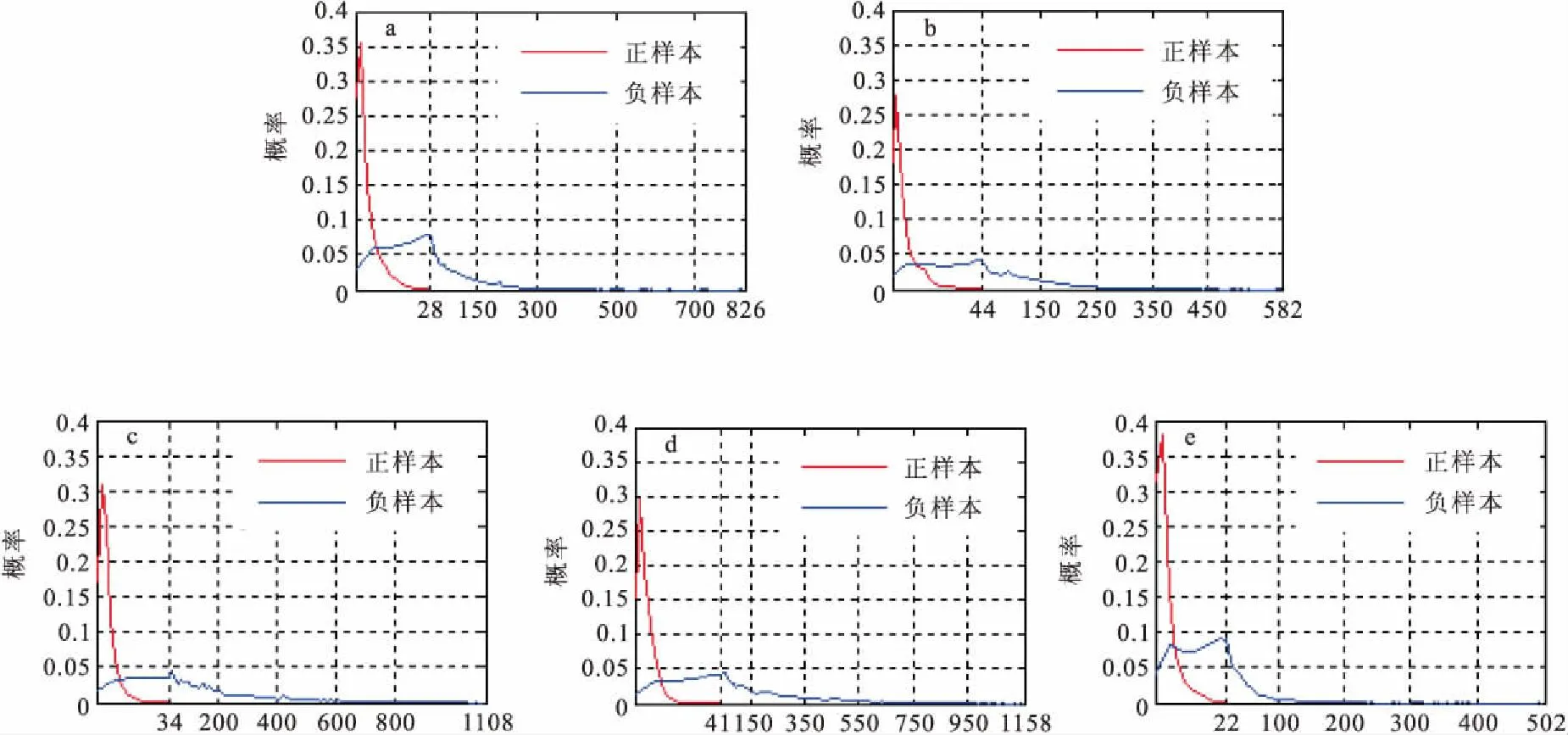
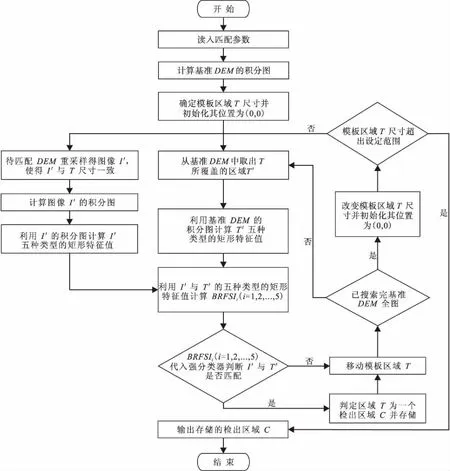
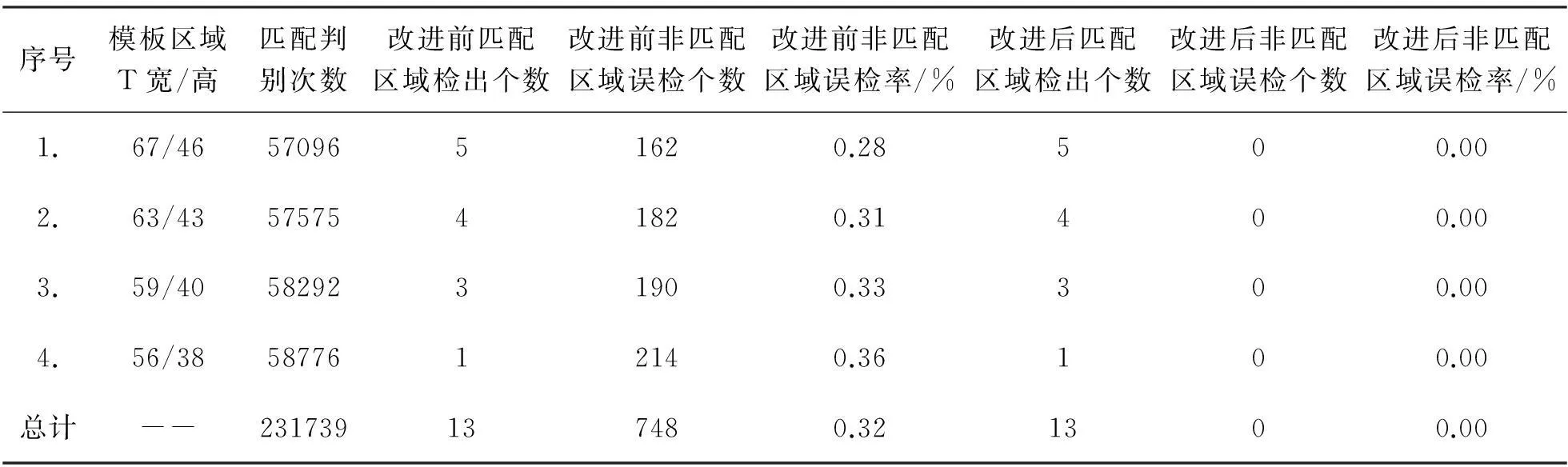
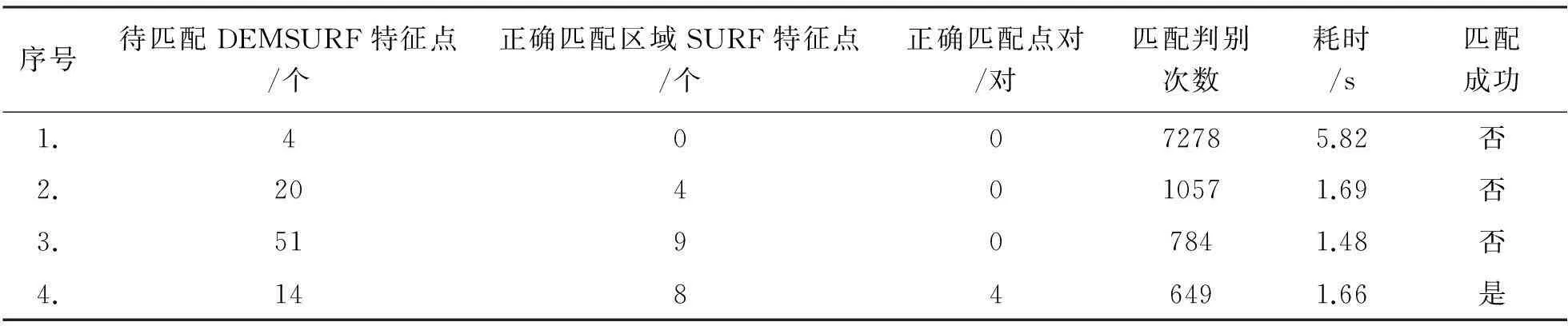
c)if(LeftError + RightError) ·SquareError=(LeftError+RightError), ·θ=BRFSI[j], ·α1=LeftConfidence, ·α2=RightConfidence; 3)挑选加权均方误差SquareError最小的图像相似度指标,并保存对应的α1、α2和θ。 2.2训练样本数据 Gentle AdaBoost算法需要有大量的样本数据才能训练出可用性较强的分类器,为此这里收集了大量的正样本(匹配样本)和负样本(非匹配样本),与一般情况下训练样本为单个图像不同,这里的样本是指图像对(待匹配图像与基准图像)中的区域R和T(R为待匹配图像重采样后的区域,T为基准图像上的搜索模板区域,R应与T具有相同尺寸)。由于区域T的位置和尺寸是不断变化的,因此,对同一对待匹配图像与基准图像有可能存在多对区域R和T,对于每对区域R和T,都可以计算出这两个区域的包含五个值的一组图像相似度指标(BRFSI1,BRFSI2,BRFSI3,BRFSI4,BRFSI5)。为了保证训练出的分类器的可用性和有效性,这里搜集了正样本6 072个,负样本29 400个,样本的具体信息如表 3所示。 表 3 训练样本集数据信息Tab.3 Information of training samples 对当前训练样本集中的正样本与负样本数据分别进行统计分析,可以绘制出每个基于矩形特征的图像相似度指标的概率分布曲线图,如图 3所示。图 3中的a、b、c、d、e分别为图像相似度指标BRFSI1、BRFSI2、BRFSI3、BRFSI4、BRFSI5的概率分布曲线图,图中的横轴为图像相似度指标的值,纵轴为概率值,每个图中从左边起第一条垂直虚线标注了该类图像相似度指标的正样本最大值(以Positive_Max表示),最右边的垂直实线标注了该类图像相似度指标的负样本最大值(以Negative_Max表示)。为了充分展示正样本的概率分布曲线,绘图时作者对横轴0~Positive_Max之间的部分进行了拉伸,如果将该部分与Positive_Max~Negative_Max部分按同比例绘制,则正样本的概率分布曲线会聚集在垂直轴的左侧而无法对正负样本概率分布曲线进行对比。 从图 3中可以看出,对于任意一个图像相似度指标,负样本的取值范围都远远大于正样本,正样本的值都集中分布在大于零的很窄的范围内,而负样本的值相对来说分布较分散,且位于距离零较远的区域,因此这五个图像相似度指标对正负样本都有较好的区分性能。对每个图像相似度指标,将正负样本数据联合后排序,找出使分类错误率最低(正样本被错分为负样本的数目与负样本被错分为正样本的数目之和最小)的元素作为分类阈值,可得单个图像相似度指标的分类性能,(表 4)。由表4可以看出,BRFSI4的分类性能最好,正确率高达95.6 %,而BRFSI5的分类性能最差,正确率只有89.01 %,且多达2 207个正样本被错分,正样本被错分率高达6.22 %。 图3 基于矩形特征的图像相似度指标概率分布曲线图Fig.3 Probability distribution curve of similarity indicators based on rectangle features(a)BRFSI1;(b)BRFSI2;(c)BRFSI3;(d)BRFSI4;(e)BRFSI5 阈值正样本错分个数负样本错分个数正样本错分率/%负样本错分率/%正确率/%BRFSI15.113141814184.04.092.0BRFSI27.5863137816353.884.6191.51BRFSI311.173432512580.913.5595.54BRFSI411.051245411051.283.1295.60BRFSI52.7714220716916.224.7789.01 2.3匹配模型 按2.1节中的方法训练出用于判定“匹配”与“非匹配”的分类器并制定匹配的流程,就建立了用于模糊匹配的匹配模型。对样本数据进行训练后首先可得五个弱分类器,参数见表 5。表5中的图像相似度指标按训练过程中被挑选为最佳弱分类器的顺序由前向后依次排列,其正确率是指弱分类器按照参数α1、α2和θ对样本数据进行分类的正确率。对比表 4和表 5可以看出,图像相似度指标在训练过程中被挑选为最佳弱分类器的顺序与该指标的分类性能一致,分类性能越好,越早被挑选出来。 对表 5中的弱分类器按Gentle AdaBoost算法联合为强分类器,如表 6所示。由表 6可知,随弱分类器个数增加,强分类器分类正确率不断增长,五个弱分类器构成的最终强分类器的理论分类正确率高达99.08 %。采用Gentle AdaBoost算法训练得到“匹配”与“非匹配”的强分类器后,在基准DEM中搜索与待匹配DEM相匹配的检出区域的流程如图 4所示,若匹配结束时检出区域C个数不为零,则以所有区域C的平均地理位置作为待匹配DEM的概略地理位置,否则匹配失败。 表5 弱分类器参数Tab.5 Parameters of weak classifiers 表 6 按Gentle AdaBoost算法联合成的强分类器Tab.6 The strong classifier obtained by combining weak classifiers using Gentle AdaBoost algorithm 3匹配模型验证 作者通过对DEM进行模糊匹配来确定待匹配DEM的概略空间位置,因此,统计时以实际正确匹配区域尺寸的1/10为标准,将位置偏离超过该标准的检出区域才认为是非匹配区域误检为匹配区域。由于最终是以所有检出区域的平均地理位置作为待匹配DEM的概略地理位置,非匹配区域误检为匹配区域会导致计算出的待匹配DEM的概略地理位置出现较大偏差,在对匹配模型进行验证时作者统计了非匹配区域误检个数和非匹配区域误检率,并以此作为衡量匹配模型优劣的参考。 图4 DEM图像模糊匹配流程Fig.4 Flowchart of fuzzy matching of DEMimage 以天宫庙某矿区DEM为例,待匹配DEM宽高为(67,46),基准DEM宽高为(800,750),搜索模板区域T初始尺寸设置为与待匹配DEM一致,对基准DEM图像进行四次遍历的统计数据如表 7所示。表 7中第五列为直接用2.3的匹配模型进行匹配的非匹配区域误检个数,第六列为该次实验的实际非匹配区域误检率,可以看出与理论非匹配区域误检率(也即负样本错分率) 0.33 %基本一致。虽然强分类器的负样本错分率只有0.33 %,但是由于每次遍历过程中要进行许多次 “匹配”与“非匹配”的判别,一次遍历的非匹配区域误检个数一般都在103量级甚至更多。为了减少非匹配区域误检个数,作者提高了“匹配”区域的判定条件,将被判定为“匹配”的区域四等分,对等分后的每块区域再进行一次判定,若四块区域中有三个以上仍被判定为“匹配”,才将原区域判定为一个检出区域。仍以该矿区DEM为例,按改进后的方法进行四次遍历的非匹配区域误检个数及误检率分别如表 7中的第八列和第九列所示,可见改进后的方法有效地避免了将非匹配区域误检为匹配区域。改进前后检出区域对比效果如图 5所示,图5中白色矩形为检出区域,红色矩形为实际正确匹配区域。 作者选取具有代表性的数据对改进后的匹配模型进行了验证,验证结果统计数据如表 8所示,该表中第八列反映了每次试验的非匹配区域误检情况。表 8中的序号1代表了待匹配DEM面积较小特征点不足且与基准DEM分辨率差异较大(3倍)的数据,序号2代表了待匹配DEM与基准DEM之间存在旋转(旋转角为8°)且分辨率差异较大(4倍)的数据,序号3代表了待匹配DEM与基准DEM之间存在旋转(旋转角为8°)但分辨率差异较小(2倍)的数据,序号4代表了待匹配DEM面积较大且与基准DEM分辨率差异较小的数据。图 6中(a)、(b)、(c)、(d)依次为表 8中序号1、2、3、4的匹配验证结果,每个小图的左上角白框内为待匹配DEM,右上角白框内为基准DEM中的正确匹配区域。由图 6可见,作者提出的匹配模型对待匹配DEM面积较小特征点不足、待匹配DEM与基准DEM之间存在轻微旋转(小于8°)、待匹配DEM与基准DEM分辨率差异较大(4倍)和较小(1.2倍)的几种典型情况都取得了良好的匹配效果。 表 7 天宫庙某矿区DEM图像模糊匹配验证结果Tab.7 Fuzzy matching verification result of A tiangongmiao mine’s DEMimgae 图5算法改进前后检出区域对比Fig.5 Comparison on selected areas before and after improving the algorithm(a)算法改进前检出区域;(b)算法改进后检出区域 序号待匹配DEM分辨率/m待匹配DEM面积/km2基准DEM分辨率/m基准DEM面积/km2匹配判别次数匹配区域检出个数非匹配区域误检个数非匹配区域误检率/%耗时/s1.10.00.462530207.994545750930.006611.322.7.52.423930160.859729401300.000022.203.15.03.796330242.81145293300.000039.254.25.07.629330271.65663279300.000081.59 对同样的实验数据,使用基于改进 SURF 算子的特征点匹配方法进行验证,结果如表 9所示。表 9中各行所用实验数据与表 8中各行依次对应。由表 9可知,除了序号4对应的汶川某矿区因待匹配DEM面积较大特征点较多且与基准DEM分辨率差异较小而匹配成功,特征点匹配方法对其他数据的验证均未成功。 图6 改进后匹配模型对四种典型数据的验证结果Fig.6 Verification result of the improved matching model on four typical data(a)小坪沟某矿DEM匹配验证结果;(b)撒海卡某矿DEM匹配验证结果;(c)朱窝子某矿DEM匹配验证结果;(d)汶川某矿DEM匹配验证结果 序号待匹配DEMSURF特征点/个正确匹配区域SURF特征点/个正确匹配点对/对匹配判别次数耗时/s匹配成功1.40072785.82否2.204010571.69否3.51907841.48否4.14846491.66是 4结论 根据五种基本类型的矩形特征,作者提出了五种新的基于矩形特征值的匹配图像相似度指标BRFSI(i=1,2,…,5),搜集整理了包含6 072个正样本和29 400个负样本的训练样本数据集,通过对训练样本数据集的统计分析得到了五种图像相似度指标各自的分类性能(分类正确率高达89.01%~95.6%),使用Gentle AdaBoost算法在该样本数据集上训练得到了“匹配”与“非匹配”的判别模型(判别模型理论判别正确率高达99.08 %)。由四种典型数据的验证结果来看,这里的模糊匹配模型很好地解决了无空间参考DEM匹配中因特征点不足或匹配DEM间相似度较低而匹配失败的问题,为图像模糊匹配和无空间参考DEM空间位置确定提供了一种新的方法技术。虽然该研究是在无空间参考DEM定位困难的背景下进行的,但是基于矩形特征的模糊匹配方法也适用于常规图像的模糊匹配。 然而,作者提出的匹配方法需要在基准DEM图像中不断变换模板区域的尺寸并移动其位置进行大量“匹配”与“非匹配”的判别,才能找出正确匹配区域,当基准DEM图像尺寸较大时,搜索过程耗时将大大增加。如何在兼顾匹配正确率的前提下,大幅度降低搜索过程耗时是以后还需要深入研究。另外,由于矩形特征是针对图像处理问题而提出的,这里的算法只适用于图像形式的规则格网DEM,其他表示形式的DEM可以转化为图像形式的规则格网DEM后再运用该算法。 参考文献: [1]ROSENHOLM D,TORELEGARD K.Three dimensional Absolute Orientation of Stereo Models Using Digital Elevation Models[J].Photogrammetric Engineering and Remote Sensing,1988,54(10):1385-1389. [2]ZHINLIN LI,ZHU XU,MINYI CEN,et al.Robust Surface Matching for Automated Detection of Local Deformations Using Least-Median-of-Squares Estimator [J].Photogram- metric Engineering and Remote Sensing,2001,67(11):1283-1292. [3]张同刚,岑敏仪,冯义从,等.采用截尾最小二乘估计的DEM匹配方法[J].测绘学报,2009,38(2):144-151. ZHANG T G,CEN M Y,FENG Y C,et al.DEMMatching Algorithm Using Least Trimmed Squares Estimator[J].Acta Geodaetica et Cartographica Sinica,2009,38(2):144-151.(In Chinese) [4]杨容浩.无控制DEM匹配算法性能比较与改进研究[D].成都:西南交通大学,2012. YANG R H.The Research on Performance Comparison and Improvement of DEMMatching Algorithms Without Ground Control Point[D].Chengdu:Southwest Jiaotong University,2012.(In Chinese) [5]吴晓萍,杨武年,佘金星,等.等高线与地形特征点云在矿山位置快速定位中的应用[J].科学技术与工程,2014,14(28):247-251. WU X P,YANG W N,SHE J X,et al.Application of Contour and Terrain Feature Point Cloud to Mine Location Quickly [J].Science Technology and Engineering,2014,14(28):247-251.(In Chinese) [6]佘金星,杨武年,吴晓萍,等.基于SURF算法的无坐标矿山空间位置匹配方法[J].国土资源科技管理,2014,31(6):103-109. SHE J X,YANG W N,WU X P,et al.Matching Method for No-Coordinate Mining Space Position Based on SURF Algorithm [J].Scientific and Technological Management of Land and Resources,2014,31(6):103-109.(In Chinese) [7]PAUL VIOLA,MICHAEL J.JONES.Robust Real-time Object Detection[J].International Journal of Computer Vision,2004,57(2):137-154. [8]PAUL VIOLA,MICHAEL J.JONES.Rapid Object Detection using a Boosted Cascade of Simple Features[C].Proceedings of the 2001 IEEE Computer Society Conference on Computer Vision and Pattern Recognition,2001,1:511-518. [9]孟庆涛.基于Haar特征概率分布与SVM的人脸检测[D].上海:华东师范大学,2008. MENG Q T.Face Detection Based on Haar-Feature Probability Distribution and SVM [D].Shanghai:East China Normal University,2008.(In Chinese) [10]PAUL VIOLA,MICHAEL J.JONES.Robust Real-Time Face Detection [J].International Journal of Computer Vision 2004,57(2):137-154. [11]QING CHEN,NICOLAS D.GEORGANAS,EMIL M.PETRIU.Hand Gesture Recognition Using Haar-Like Features and a Stochastic Context-Free Grammar[J].IEEE Transactions on Instrumentation and Measurement.2008,57(8):1562-1571. [12]文学志,方巍,郑钰辉.一种基于类Haar特征和改进AdaBoost分类器的车辆识别算法[J].电子学报,2011,39(5):1121-1126. WEN X Z,FANG W,ZHENG Y H.An Algorithm Based on Haar-Like Features and Improved AdaBoost Classifier for Vehicle Recognition[J].Acta Electronica Sinica,2011,39(5):1121-1126.(In Chinese) [13]金立生,王岩,刘景华,等.基于Adaboost算法的日间前方车辆检测[J].吉林大学学报:工学版,2014,44(6):1604-1608. JIN L S,WANG Y,LIU J H,et al.Front Vehicle Detection Based on Adaboost Algorithm in Datime [J].Journal of Jilin University:Engineering and Technology Edition,2014,44(6):1604-1608.(In Chinese) [14]陈瑞,林喜荣,丁天怀.基于AdaBoost算法的快速虹膜检测与定位[J].清华大学学报:自然科学版,2008,48(11):1923-1926. CHEN R,LIN X R,DING T H.High-speed Iris Detection and Localization Based on AdaBoost Algorithm[J].Journal of Tsinghua University(Science and Technology),2008,48(11):1923-1926.(In Chinese) [15]LIENHART,R.,MAYDT,J..An Extended Set of Haar-like Features for Rapid Object Detection[C].Proceedings of the International Conference on Image Processing,2002.1:900-903. [16]NASER EL-SHEIMY,CATERINA VALEO,AYMAN HABIB.Digital Terrain Modeling:Acquisition,Manipulation,and Applications [M].Artech House,INC.,2005. [17]YOAV FREUND,ROBERT E.Schapire.Experiments with a new boosting algorithm[C].Machine Learning:Proceedings of the Thirteenth International Conference,1996,148- 156. [18]YOAV FREUND,ROBERT E.Schapire.A Decision-Theoretic Generalization of On-Line Learning and an Application to Boosting[J].Journal of Computer and System Sciences,1997,55(1):119-139. [19]曹莹,苗启广,刘家辰,等.AdaBoost 算法研究进展与展望[J].自动化学报,2013,39(6):745-758. CAO Y,MIAO Q G,LIU J C,et al.Advance and Prospects of AdaBoost Algorithm[J].Acta Automatica Sinica,2013,39(6):745-758.(In Chinese) [20]JEROME FRIEDMAN,TREVOR HASTIE,ROBERT TIBSHIRANI.Additive logistic regression:a statistical view of boosting[J].The Annals of Statistics,2000,28(2):337-407. [21]RAINER LIENHART,ALEXANDER KURANOV,VADIM PISAREVSKY.Empirical Analysis of Detection Cascades of Boosted Classifiers for Rapid Object Detection[C].Pattern Recognition,Lecture Notes in Computer Science.2003,297-304. [22]曹二奎.基于Gentle Adaboost的人脸检测算法研究[D].西安:西安电子科技大学,2013. CAO E K.Research on Face Detection Algorithm Based on Gentle Adaboost[D].Xian:Xidian University,2013.(In Chinese) Fuzzy matching of DEMimage without spatial reference based on rectangle features YANG Yan-tong,YANG Wu-nian,SHI Lei,WU Xiao-ping,SHE Jin-xing (Key Laboratory of Geoscience Spatial Information Technology,Ministry of Land and Resources of the P.R.China,Chengdu University of Technology,Chengdu610059,China) Abstract:One of the key technologies of DEMapplication is multi-source,multi-temporal and multi-scale DEMmatching.The existing DEMmatching technologies usually fail when DEMis matched without spatial reference because of the insufficient feature points or the vast differences of resolution,terrain features and some others.Therefore,the method,fuzzy matching of DEMwithout spatial reference based on rectangle features,is proposed in this paper.First,five images similarity indicators were constructed based on rectangle features and then the statistical analysis was used respectively in every indicator’s classification performance.Second,the classifier,to discriminate whether matched or not,was obtained after using Gentle AdaBoost algorithm training massive samples.Finally,a model of DEMimage fuzzy matching was established.The method used in this paper shows a capability in solving two difficult problems,the lack of feature points when DEMis matched without spatial reference and low similarity between DEMdata,by verifying of four typical data.All these above may provide precise DEMmatching a fine initial condition. Key words:rectangle features;DEMwithout spatial reference;Gentle AdaBoost algorithm;classifier;imagefuzzy matching 收稿日期:2015-10-10改回日期:2015-11-05 基金项目:国家自然科学基金资助项目(批准号:41372340);国土资源部地学空间信息技术重点实验室开放基金资助项目(KLGSIT2014-05) 作者简介:杨彦通(1987-),男,硕士,主要研究方向为数字图像处理与遥感地学分析,E-mail:yytcdut@163.com。*通信作者:杨武年(1954-),男,博导,主要从事3S技术及地学应用科研与教学,E-mail:ywn@cdut.edu.cn。 文章编号:1001-1749(2016)02-0264-11 中图分类号:TP 79 文献标志码:A DOI:10.3969/j.issn.1001-1749.2016.02.19






猜你喜欢
电子测试(2018年1期)2018-04-18 11:52:35
电子技术与软件工程(2017年14期)2017-09-08 06:54:08
计算机应用(2017年4期)2017-06-27 08:10:42
光学精密工程(2016年4期)2016-11-07 09:05:00
光学精密工程(2016年3期)2016-11-07 09:03:33
计算机工程与科学(2015年1期)2015-04-01 06:26:36
电子与信息学报(2014年10期)2014-11-18 03:15:16
电子世界(2014年12期)2014-10-21 11:09:39
航天返回与遥感(2014年5期)2014-07-31 17:57:09
电测与仪表(2014年15期)2014-04-04 12:05:20