一种减小无刷直流电动机噪声的PWM调制方法
2016-06-14 09:48于慎波
电工技术学报 2016年9期
陈 健 于慎波
(1.沈阳工业大学国家稀土永磁电机工程技术研究中心 沈阳 110870 2.沈阳工业大学机械工程学院 沈阳 110870)
一种减小无刷直流电动机噪声的PWM调制方法
陈健1于慎波2
(1.沈阳工业大学国家稀土永磁电机工程技术研究中心沈阳110870 2.沈阳工业大学机械工程学院沈阳110870)
摘要提出一种三相绕组同时参与调制的方法,以减小无刷直流电动机换相期间的转矩脉动和噪声。该方法包括三种调制方式,分别计算了每种方式关断相、开通相以及非换相相占空比的数学表达式。以1台5.5 kW无刷直流电动机为例,通过瞬态声场有限元仿真,证明采用该方法能有效抑制电动机噪声。最后对该台样机不同PWM调制方法的转矩脉动和噪声进行测试,验证了所提方法的正确性和可行性。
关键词:无刷直流电动机换相转矩脉动噪声调制方法有限元
0引言
无刷直流电动机具有结构简单、功率密度大、高转矩电流比以及调速性能良好等优点,在国防、工业、交通、家用电器等领域得到了广泛应用[1]。然而电动机运行中会产生齿槽转矩与换相转矩脉动,影响系统的控制精度,降低电动机的稳定性,增大噪声,从而限制了电动机在高精度及对稳定性要求较高的场合的应用[2]。因此,抑制无刷直流电动机转矩脉动一直是人们研究和解决的热点问题之一。
无刷直流电动机产生的转矩脉动主要从电动机优化设计和控制策略两方面来解决。电动机优化设计方面:文献[3-5]对电动机的槽口进行了优化,得到使齿槽转矩最小的槽口偏移角度和槽口宽度;文献[6]分析了转子永磁体不对称对齿槽转矩的影响,指出分数槽结构是消除齿槽转矩的有效方法;文献[7,8]采用斜槽、斜极、不等宽齿等方法减小齿槽转矩;文献[9]分析了分块永磁体对表面式永磁电动机齿槽转矩的影响,得到了永磁体分块数、分块宽度和分块间隔与齿槽转矩之间的关系。电动机控制策略方面:文献[10]介绍了抑制无刷直流电动机转矩脉动常用的6种方法,包括电流滞环控制法、重叠换相法、电流预测控制法、二二导通方式与三三导通方式切换法、最佳开通角法、谐波消去法的原理及优缺点;文献[11-13]通过改变PWM调制方式消除转矩脉动;文献[14]给出了一种优化的无刷直流电动机变母线电压六拍控制方法,通过对缓冲区进行PWM调制,降低电动机运行过程中的转矩脉动;文献[15,16]阐述了以转矩脉动最小化为目的的无刷直流电动机直接转矩控制技术。以上文献的研究重点是如何消除转矩脉动,对转矩脉动对噪声的影响研究较少。目前尚未有文献系统研究无刷直流电动机调制方法对转矩脉动和噪声的影响。
本文从控制策略方面减小无刷直流电动机的转矩脉动和噪声,提出了一种减小换相转矩脉动的PWM调制方法。该方法保证换相期间关断相电流下降速率和导通相电流上升速率相等,减小转矩脉动和噪声。以一台5.5 kW无刷直流电动机为例,采用有限元法计算气隙磁通密度、电磁力、声压的分布曲线,得到不同PWM调制方法对噪声的影响规律。最后通过实验验证了本文所提方法的有效性和仿真结果的正确性。
1新的PWM调制方法
三相无刷直流电动机工作于120°导通方式时,每隔60°电角度进行一次换相。换相期间,关断相电流的下降速率和导通相电流的上升速率不相等,导致转矩脉动的出现。减小换相期间转矩脉动的常用方法是减慢绕组电流变化较快的那一相或加快变化较慢的那一相。
无刷直流电动机电磁转矩方程为
(1)
式中,Ω为电动机的机械角速度;iA、iB、iC分别为电动机绕组相电流;eA、eB、eC分别为各相反电动势。
由式(1)可知,要保持电磁转矩恒定,在转速一定时,eAiA、eBiB、eCiC之和必须恒定。本文采用对电动机三相绕组同时进行调制的方法,使关断相与导通相电流的变化率相等,减小了换相期间转矩脉动,从而抑制了噪声。
该方法非换相区采用ON_PWM调制方式,即在开关管导通的120°期间,前60°保持恒通,后60°进行PWM调制。换相区对3个开关管同时进行调制,根据各开关管的占空比不同,可分为3种方式:①如图1a所示,关断相开关管VT1保持恒通,开通相开关管VT3与非换相相开关管VT2同时进行PWM调制;②如图1b所示,非换相相开关管VT2保持恒通,关断相开关管VT1与开通相开关管VT3同时进行PWM调制;③如图1c所示,开通相开关管VT3保持恒通,关断相开关管VT1与非换相相开关管VT2同时进行PWM调制。
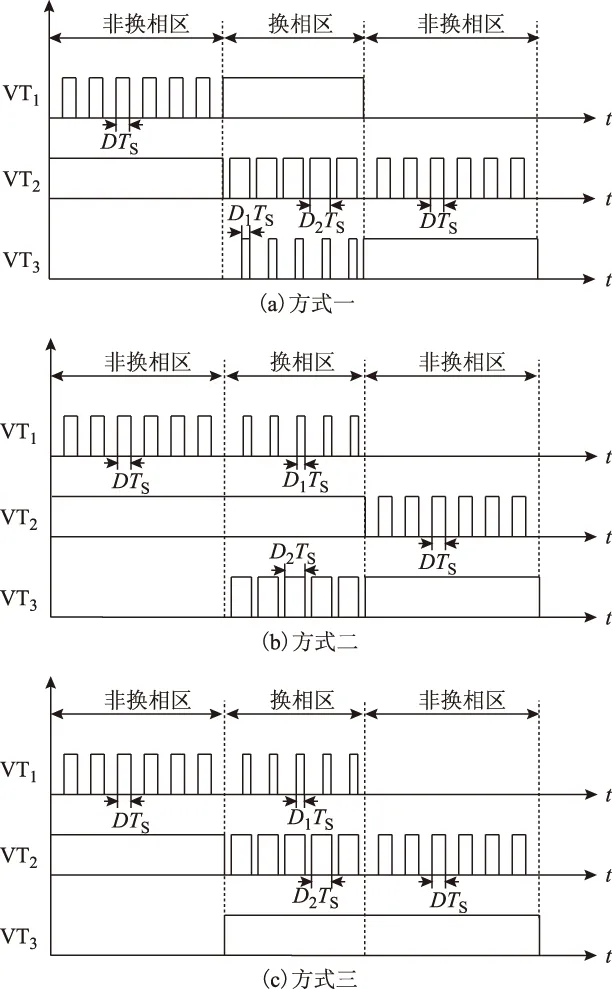
图1 换相区间调制方式Fig.1 Modulation method in commutation interval
1.1方式一
无刷直流电动机采用三相全桥两两导通驱动电路时,以AC→BC换相过程为例进行分析。由图1a可见,此时VT1占空比为1,设VT2占空比为D2(0
等电聚焦完成后,取出胶条,用滤纸吸取胶条表面多余液体,依次放入平衡液Ⅰ[50 mmol/l Tris-HCl缓冲液(pH值8.8),6 mol/l尿素、2%SDS、30%甘油、0.002%溴酚蓝、1%DTT]和平衡液Ⅱ[50 mmol/l Tris-HCl缓冲液 (pH值8.8)、6 mol/l尿素、2%SDS、30%甘油、0.002%溴酚蓝、2.5%碘乙酰胺]中,于摇床上分别平衡15 min。
当VT1导通,VT2、VT3断开时,绕组中电流的流动情况如图2所示。关断相A相上桥臂开关管VT1导通,A相绕组接电源正极;开通相B相上桥臂开关管VT3关断,B相绕组通过下桥臂二极管VD6续流;非换相相C相下桥臂开关管VT2关断,C相绕组通过上桥臂二极管VD5续流。
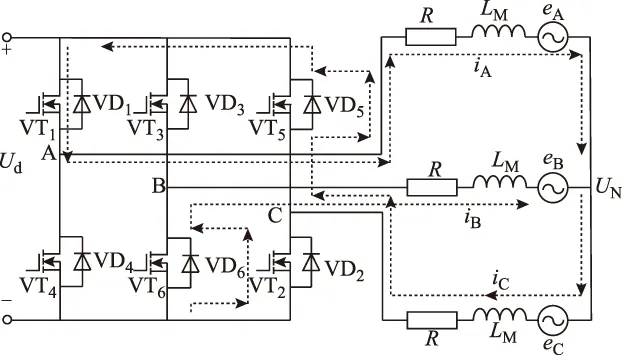
图2 VT1导通,VT2、VT3断开时电流方向Fig.2 Current direction when VT1 on,VT2 and VT3 off
电动机三相端电压平衡方程分别为
(2)
式中,UA、UB、UC分别为电动机绕组三相端电压;UN为三相中心点对地电压;L为每相绕组的自感;M为每两相绕组间的互感;R为绕组相电阻。
在换相区间,eA=eB=E,eC=-E。根据基尔霍夫电流定律
(3)
由于绕组电流和电阻的乘积同绕组反电动势相比一般较小,因此可忽略绕组电阻的影响,令R=0,由式(2)、式(3)得
(4)
将UN、eA、eB、eC带入式(2),三相电流的变化率分别为
(5)
当VT1、VT2导通,VT3断开时,绕组中电流的流动情况如图3所示。关断相A相上桥臂开关管VT1导通,A相绕组接电源正极;开通相B相上桥臂开关管VT3关断,B相绕组通过下桥臂二极管VD6续流;非换相相C相下桥臂开关管VT2导通,C相绕组接电源负极。
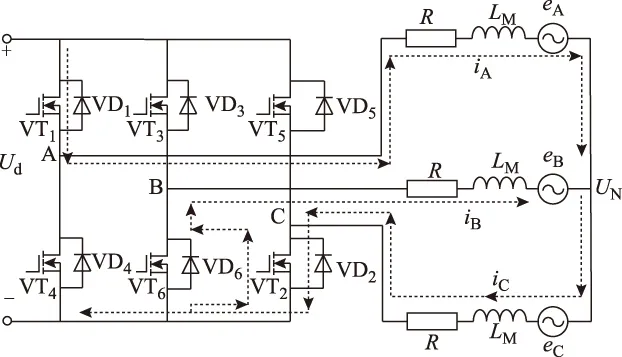
图3 VT1、VT2导通,VT3断开时电流方向Fig.3 Current direction when VT1 and VT2 on,VT3 off
此时电动机三相端电压平衡方程分别为
(6)
由式(3)、式(6)得三相电流的变化率分别为
(7)
当VT1、VT2、VT3均导通时,绕组中电流的流动情况如图4所示。关断相A相上桥臂开关管VT1导通,A相绕组接电源正极;开通相B相上桥臂开关管VT3导通,B相绕组接电源正极;非换相相C相下桥臂开关管VT2导通,C相绕组接电源负极。

图4 VT1、VT2、VT3均导通时电流方向Fig.4 Current direction when VT1,VT2 and VT3 on
(8)
由式(3)、式(8)得三相电流的变化率分别为
(9)
在换相区,VT1导通,VT2、VT3断开所占的比例DA=1-D2;VT1、VT2导通,VT3断开所占的比例DB=D2-D1;VT1、VT2、VT3均导通所占的比例DC=D1。 则在换相区,三相电流的平均变化率分别为
(10)
当关断相A相电流下降速率等于开通相B相电流上升速率时,非换相相C相电流在换相期间恒定,因而没有换相转矩脉动。此时
(11)
将式(5)、式(7)、式(9)、式(10)代入式(11)中并化简得
(12)
当R=0时,无刷直流电动机满足
UdD=2E
(13)
则式(12)可进一步化简为
D1+2D2=1+2DD2>D1
(14)
开通相B相在换相过程中电流由零变化到绕组工作电流I的时间为换相时间t1,则
(15)
电流值I通过电流传感器获得,将式(10)代入式(15)中,得换相时间t1的表达式为
(16)
1.2方式二
以AC→BC换相过程为例进行分析。由图1b可见,此时VT2占空比为1,设VT3占空比为D2(0
(17)
由式(11)、式(17)得
D2+D1=2DD2>D1
(18)
换相时间t2的表达式为
(19)
1.3方式三
以AC→BC换相过程为例进行分析。由图1c可见,此时VT3占空比为1,设VT2占空比为D2(0
(20)
由式(11)、式(20)得
D1+2D2=1+2DD2>D1
(21)
换相时间t3的表达式为
(22)
式(14)、式(18)、式(21)给出了在换相过程中,三相绕组同时参与调制,各相绕组占空比的数学表达式。该PWM调制方法包括3种方式,这3种方式都可以减小无刷直流电动机换相过程的转矩脉动,且算法简单,易于实现。在每个换相区间,采用其中的一种方式时,参与调制的3个开关管占空比不同,损耗不能平均分配。可交替使用这3种调制方式,即每种方式各占用1/3换相时间,这样既减小了转矩脉动,参与调制的3个开关管损耗又可以平均分配。
2PWM调制方法对噪声的影响
本文以一台5.5 kW无刷直流电动机为分析对象,采用有限元软件ANSYS对不同PWM调制方法的二维瞬态声场进行分析。电动机的基本设计参数如表1 所示。
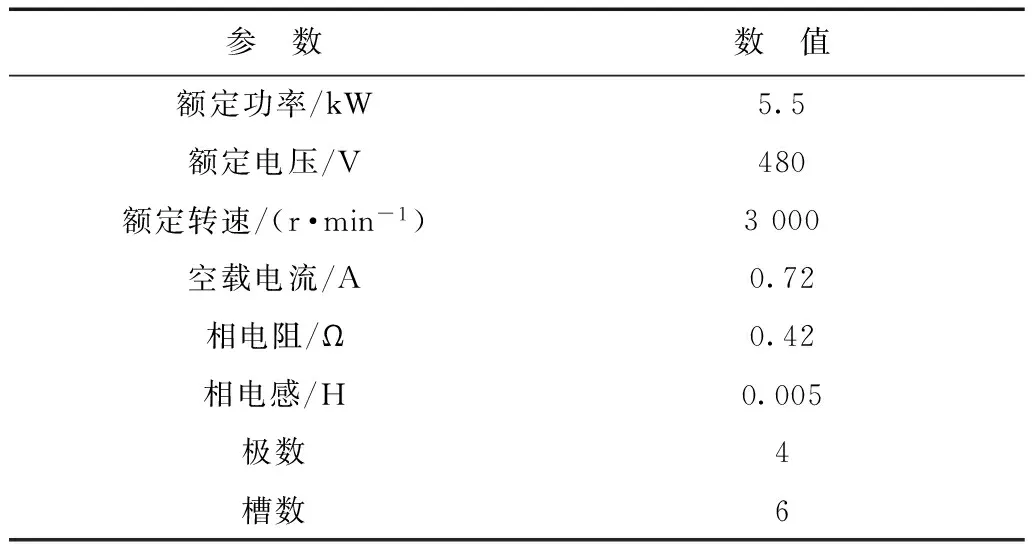
表1 5.5 kW电动机主要参数
无刷直流电动机二维声场的有限元计算流程为:首先,测取不同PWM调制方法时电动机的三相空载电流,通过二维磁场计算得到气隙磁场分布,如图5所示。然后,利用麦克斯韦定律将气隙磁场转换为径向电磁力,作用到定子铁心表面,计算声固耦合的系统有限元模型,如图6所示。最后,提取声压的瞬时曲线,如图7所示,并通过公式转换为声压级的大小。
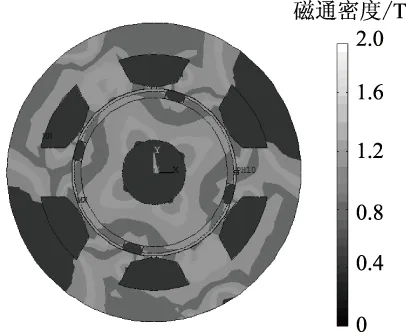
图5 电动机磁通密度分布Fig.5 Distribution of magnetic flux density
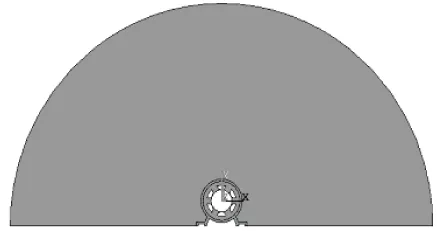
图6 声固耦合有限元模型Fig.6 Model of acoustic-structure coupling
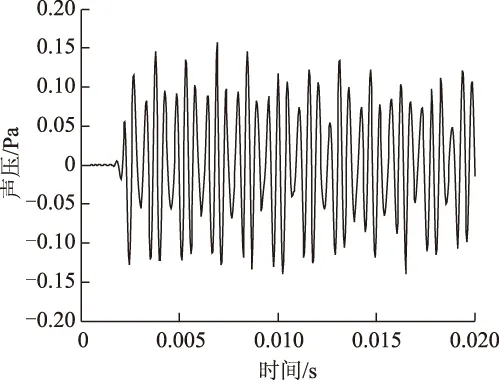
图7 噪声瞬时声压曲线Fig.7 Chart of transient noise pressure
噪声的大小一般用声压级表示,需要将图7中的声压曲线转换成声压级的大小。声压级等于声压有效值P和基准声压比值的常用对数乘以20,即
(23)
式中,Lp为声压级;P为声压;P0为基准声压,P0=2×10-5Pa。
采用有限元方法计算了5.5 kW无刷直流电动机不同调制方法时的空载噪声,计算结果如图8所示。传统的4种PWM调制方法,PWM_ON噪声最大,为75.2 dB(A);ON_PWM噪声最小,为73.8 dB(A);H_PWM_L_ON与H_ON_L_PWM噪声相等,均为74.6 dB(A)。当采用本文提出的方法后(包括单独使用一种调制方式和交替使用3种调制方式),噪声值为69.5 dB(A),有了明显减小。

图8 不同调制方法时的噪声值Fig.8 Noise values using different modulation method
3实验验证与分析
为了对本文所提PWM调制方法及仿真结果进行验证,采用美国TI公司DSP TMS320F2812为控制芯片,PM50RLA120系列IPM为开关器件,构建了实验平台。选用一台5.5 kW无刷直流电动机,电动机参数如表1所示,实验时PWM的载波频率为5 kHz,即周期为0.2 ms。
采用德国HBM公司扭矩传感器测试电动机额定负载时的转矩波动。5.5 kW无刷直流电动机额定转速为3 000 r/min,极数为4,因此电动机旋转360°电角度对应时间为0.01 s。图9、图10分别为采用不同调制方式时转矩随时间的变化规律。
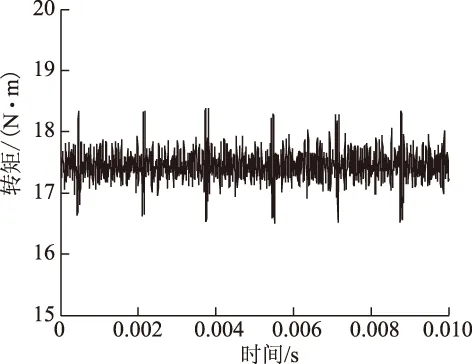
图9 ON_PWM调制方式时的转矩脉动Fig.9 Torque ripple waveforms using ON_PWM modulation method
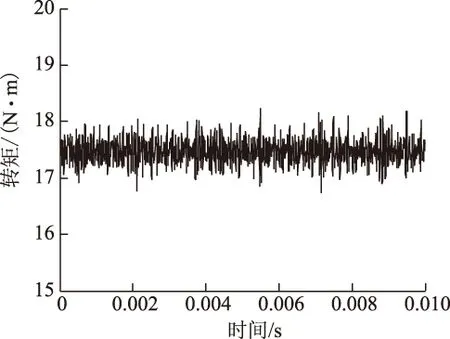
图10 本文调制方式时的转矩脉动Fig.10 Torque ripple waveforms using presented modulation method
图9中,0.01 s时间内产生6次明显的转矩脉动,是由换相引起的。图10中,采用本文所提PWM调制方法后,换相期间转矩波动峰值明显减小,比非换相期间产生的转矩波动稍大。
采用丹麦B&K公司的振动噪声测试系统测取了电动机空载时的噪声信号。图11、图12分别为采用不同调制方式时的噪声频域波形。实验时PWM的载波频率为5 kHz,因此在5 kHz及其倍频处出现了峰值。对比图11与图12,图中高频部分曲线基本吻合,低频部分曲线具有明显区别。
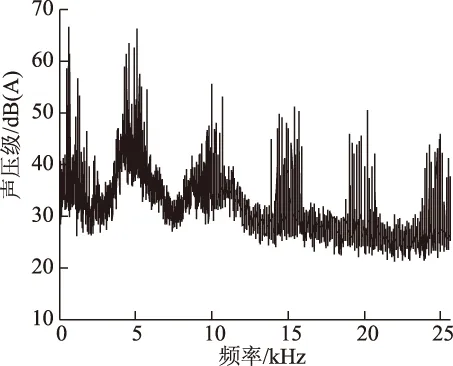
图11 ON_PWM调制方式时的噪声频谱(0~25.6 kHz)Fig.11 Noise spectrum waveforms using ON_PWM modulation method(0-25.6 kHz)
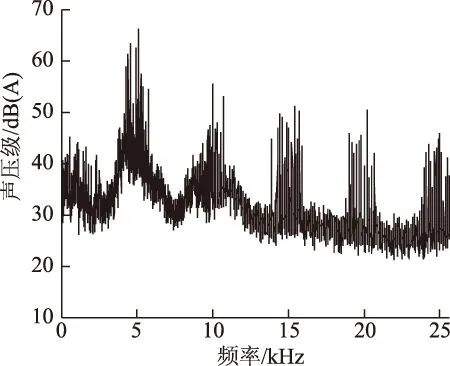
图12 本文调制方式时的噪声频谱(0~25.6 kHz)Fig.12 Noise spectrum waveforms using presented modulation method(0-25.6 kHz)
对图11和图12的低频段进行放大,图13中在频率600 Hz、1 200 Hz、1 800 Hz处出现了峰值。600 Hz是由电动机换相期间转矩波动产生的频率信号,1 200 Hz、1 800 Hz是其倍频信号。图14中采用本文PWM调制方法后,由于换相转矩脉动减小,因此由转矩脉动产生的噪声得到抑制,说明转矩脉动与噪声之间存在较强的关联性。
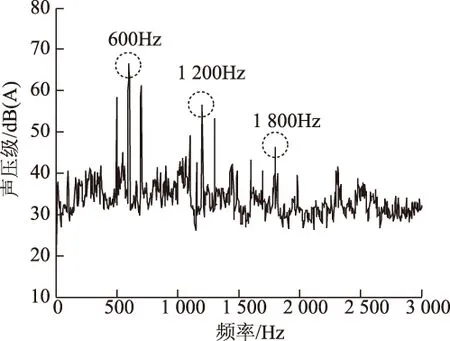
图13 ON_PWM调制方式时的噪声频谱(0~3 000 Hz)Fig.13 Noise spectrum waveforms using ON_PWM modulation method(0-3 000 Hz)
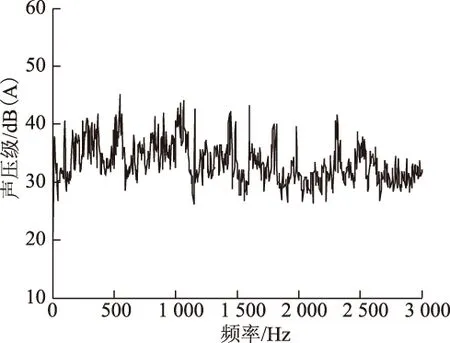
图14 本文调制方式时的噪声频谱(0~3 000 Hz)Fig.14 Noise spectrum waveforms using presented modulation method(0-3 000 Hz)
4结论
转矩脉动和噪声是影响无刷直流电动机性能的重要因素。本文基于对换相过程的分析,提出一种三相绕组同时参与调制的方法来减小无刷直流电动机换相期间的转矩脉动和噪声。经过仿真结果和实验验证,该方法使非换相相电流保持恒定,减小了换相转矩脉动,消除了由换相转矩脉动引起的噪声频率成分。该方法通过软件编程实现,算法简单,不需要增加硬件,有效抑制了换相转矩脉动和噪声,提高了无刷直流电动机的控制精度与稳定性。
参考文献
[1]Takashi K,Shigenobu N.Brushless motors:advanced theory and modern applications[M].Tokyo,Japan:Sogo Electronics Press,2003,1-20.
[2]张冉,王秀和,乔东伟,等.极弧系数选择对永磁无刷直流电机激振力波的影响[J].中国电机工程学报,2010,30(21):79-85.
Zhang Ran,Wang Xiuhe,Qiao Dongwei,et al.Influence of pole-arc coefficient on exciting force waves of permanent magnet brushless DC motors[J].Proceedings of the CSEE,2010,30(21):79-85.
[3]Abbaszadeh K,Rezaee A F,Teshnehlab M.Slot opening optimization of surface mounted permanent magnet motor for cogging torque reduction[J].Energy Conversion and Management,2012,55(10):108-115.
[4]王晓远,贾旭.基于槽口优化的电动汽车用大功率无刷直流电机齿槽转矩削弱方法[J].电工技术学报,2013,28(6):40-45.
Wang Xiaoyuan,Jia Xu.Optimization for the Slot opening to reduce cogging torque in high-power BLDC in electric vehicles[J].Transactions of China Electro-technical Society,2013,28(6):40-45.
[5]Abbaszadeh K,Jafari M.Optimizing cogging torque reduction in slot opening shift method for BLDC motor by RSM[C]//2011 2nd Power Electronics,Drive Systems and Technologies Conference,Tehran,2011:62-66.
[6]程树康,葛新,高宏伟,等.分数槽无刷直流电动机齿槽定位力矩的研究[J].中国电机工程学报,2008,28(21):107-111.Cheng Shukang,Ge Xin,Gao Hongwei,et al.Research of cogging torque in the brushless DC motor with fractional ratio of slots and poles[J].Proceedings of the CSEE,2008,28(21):107-111.
[7]Hwang K Y,Lin H,Rhyu S H,et al.A study on the novel coefficient modeling for a skewed permanent magnet and overhang structure for optimal design of brushless DC motor[J].IEEE Transactions on Magnetics,2012,48(5):1918-1923.
[8]Wang D H,Wang X H,Qiao D W,et al.Reducing cogging torque in surface-mounted permanent-magnet motors by nonuniformly distributed teeth method[J].IEEE Transactions on Magnetics,2011,47(9):2231-2239.
[9]杨玉波,王秀和,朱常青.基于分块永磁磁极的永磁电机齿槽转矩削弱方法[J].电工技术学报,2012,27(3):73-78.
Yang Yubo,Wang Xiuhe,Zhu Changqing.Effect of permanent magnet segmentation on the cogging torque of surface mounted permanent magnet motors[J].Transactions of China Electrotechnical Society,2012,27(3):73-78.
[10]张勇,程小华.无刷直流电机转矩脉动抑制措施研究[J].微电机,2013,46(7):88-91.
Zhang Yong,Cheng Xiaohua.Research on torque ripple suppression measures of BLDC motors[J].Micromotors,2013,46(7):88-91.
[11]Lin Y K,Lai Y S.Pulse-width modulation technique for BLDCM drives to reduce commutation torque ripple without calculation of commutation time[J].IEEE Transactions on Industry Applications,2011,47(4):1786-1793.
[12]石坚,李铁才.无刷直流电动机低转矩脉动超前换相控制方法[J].中国电机工程学报,2012,32(30):112-117.
Shi Jian,Li Tiecai.An advance commutation control method for low torque ripple of brushless DC motors[J].Proceedings of the CSEE,2012,32(30):112-117.
[13]王大方,卜德明,朱成,等.一种减小无刷直流电机换相转矩脉动的调制方法[J].电工技术学报,2014,29(5):160-166.
Wang Dafang,Bu Deming,Zhu Cheng,et al.A modulation method to decrease commutation torque ripple of brushless DC motors[J].Transactions of China Electrotechnical Society,2014,29(5):160-166.
[14]石坚,李铁才.一种消除无刷直流电动机换相转矩脉动的PWM调制策略[J].中国电机工程学报,2012,32(24):110-116.
Shi Jian,Li Tiecai.A PWM strategy to eliminate commutation torque ripple of brushless DC motors[J].Proceedings of the CSEE,2012,32(24):110-116.
[15]Gao Jin,Hu Yuwen.Direct self-control for BLDC motor drives based on three-dimensional coordinate system[J].IEEE Transactions on Industrial Electronics,2010,57(8):2836-2844.
[16]安群涛,孙立志,刘超,等.无刷直流电机的磁链自控直接转矩控制[J].中国电机工程学报,2010,30(12):86-92.
An Quntao,Sun Lizhi,Liu Chao,et al.Flux linkage self-control based direct torque control of brushless DC motor[J].Proceedings of the CSEE,2010,30(12):86-92.
作者简介
陈健男,1982年生,硕士,工程师,研究方向为永磁电机控制、振动噪声抑制、永磁电机测试。
E-mail:343433851@qq.com(通信作者)
于慎波男,1958年生,教授,博士生导师,研究方向为电机噪声的计算与抑制分析。
E-mail:yushenbo@126.com
A PWM Modulation Method to Decrease Noise of Brushless DC Motors
Chen Jian1Yu Shenbo2
(1.National Engineering Research Center for REPM Electrical MachinesShenyang University of Technology Shenyang110870China 2.School of Mechanical EngineeringShenyang University of TechnologyShenyang110870China)
AbstractIn the paper, the three-phase corporative modulation method is proposed for suppressing brushless DC motors commutation torque ripple and electromagnetic noise.In this method, there are three types of modulation.The duty cycle expressions of the off-going phase, the on-going phase, and the non-commutation phase are calculated.The finite element method is adopted to analyze transient acoustic field of one 5.5 kW.The proposed method is illustrated to be suitable to suppress electromagnetic noise.The torque ripple and electromagnetic noise with different PWM modulation method for the 5.5 kW prototype motor is built for test.The validity of the proposed method is confirmed by both simulation and experimental results.
Keywords:Brushless DC motors,commutation torque ripple,noise,modulation method,finite element method
中图分类号:TM315
国家自然科学基金(51175350,51307111)和沈阳市科学技术计划项目(F15-199-1-13)资助。
收稿日期2015-02-05改稿日期2015-05-13
猜你喜欢
电工技术学报(2022年20期)2022-10-29
中国特种设备安全(2022年3期)2022-07-08
重庆理工大学学报(自然科学)(2022年5期)2022-06-18
微电机(2022年1期)2022-03-21
内蒙古电力技术(2021年5期)2021-11-21
莆田学院学报(2021年5期)2021-11-13
甘肃科技(2020年20期)2020-04-13
电测与仪表(2016年1期)2016-04-12
客车技术与研究(2015年3期)2015-08-24
舰船科学技术(2015年8期)2015-02-27