
数码照片中摄影物距推算与摄影现场重建
2016-06-12 01:10冯永平满勤浙江警察学院浙江杭州310053
中国司法鉴定 2016年3期
冯永平,满勤(浙江警察学院,浙江杭州310053)
数码照片中摄影物距推算与摄影现场重建
冯永平,满勤
(浙江警察学院,浙江杭州310053)
摘要:目的研究推算数码照片中的目标物与摄影机位的距离(即物距)。方法首先在电脑中查看数码照片拍摄所用的焦距值,其次在Adobe Photoshop软件中测得目标物成像在照片中的影像大小值,在拍摄现场实际测量目标物的大小值,最终依据摄影成像原理结合应用商用图像处理软件(ACDSee、Adobe Photoshop)完成对摄影物距的推算。结果实验测试表明,推算的物距与实际物距的误差一般在0.2%~1%以内。结论在满足一定拍摄条件下可借助数码影像资料还原当时摄影者的方位,对摄影现场重建具有实际的应用价值。
关键词:数码照片;数字图像;EXIF;物距;现场重建
照相机不仅是一种影像记录设备,也可作为测距仪器使用。当照相机对准某物体对焦清晰后,照相机与物体的距离(即物距)就已经被锁定,拍摄者可以从照相机的调焦环上得知拍摄时物距的大体数值,但因照相机上的调焦标尺的档位难以细分,无法读取精确的数值,也无法从事后的影像资料中获得物距数值。对大多数的摄影者或观赏者来说,无需知道摄影物距的大小,这对摄影实践没有多大意义。但是,在侦查实践中,有时候我们可能有机会获得与案件侦查有关的影像资料,进而想要知道当时拍摄影像资料时的摄影物距,以便进一步推断摄影者所处的方位,重建摄影当时的情形。笔者对此进行了实验研究,依据摄影成像原理,结合商用图像处理软件(ACDSee、Adobe Photoshop)的应用完成了对数码照片中摄影物距的推算,现将原理与方法报道如下。
1 方法
1.1摄影成像原理与物距理论计算
照相机通过镜头把被拍景物成像在感光片(数码相机的CCD或CMOS)上,镜头的成像原理符合凸透镜的成像规律[1]。
设:v为像距、u为物距、f为镜头焦距、h为景物成像在CCD或CMOS上的影像高度或宽度、H为景物的实际高度或宽度,M为放大率,则透镜成像满足下列公式:

依据公式(1)、(2)推论得到

在公式(3)中,镜头焦距f可以简单地通过在电脑上查看数码照片文件的摘要(右键单击—属性—摘要)查看拍摄当时照相机的品牌、型号、像素大小、拍摄参数及所用的焦距值(图1),也可用ACDSee等图像查看软件查看图像的属性显示的EXIF详细信息[2-3];景物的实际高度或宽度H可以到现场通过测量器具测得;景物影像的高度或宽度h是指景物成像在CCD或CMOS感光器件上的影像尺寸大小,这需要在Adobe Photoshop软件窗口中加以求算的。
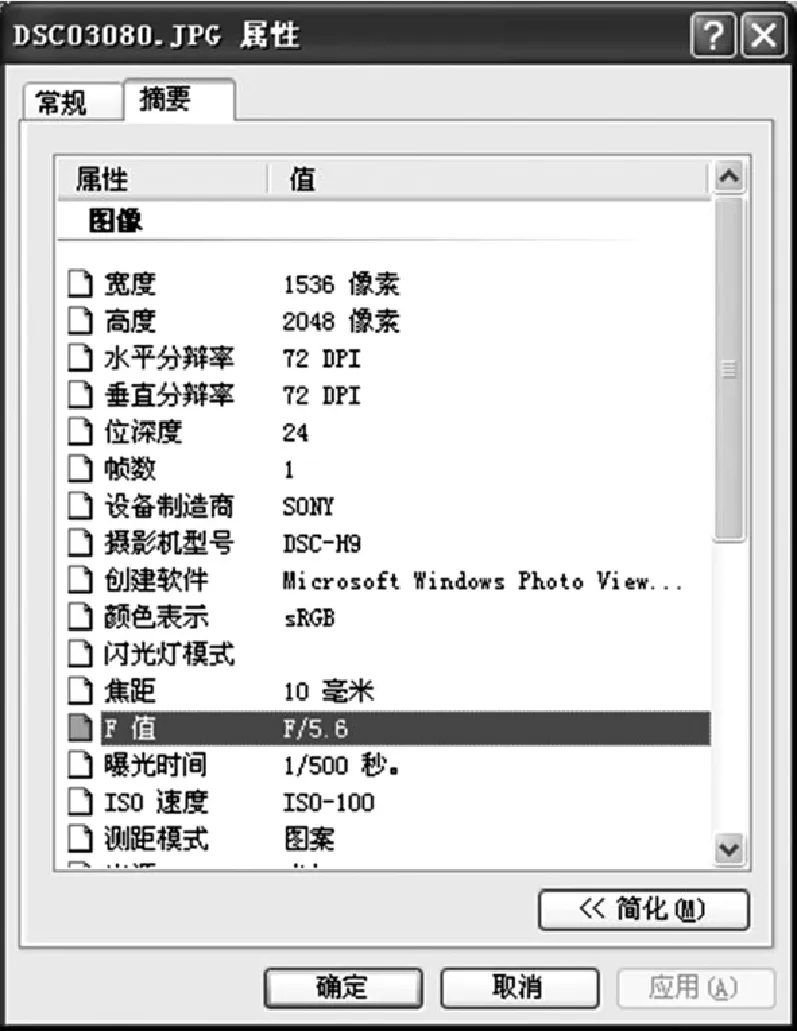
图1 照片文件属性信息
具体方法如下:
在Photoshop软件窗口打开所拍的图像(图2),利用矩形对角线法找到图像中心点O,向下适当扩大图像的画布大小,背景色选白色,过O点的纵向垂直线即为拍摄照片时的光轴轴线,摄影者位置即照相机位置必处于该光轴轴线的某一位置,设为B点。使用度量工具仔细测量目标物的高度或宽度像素值D1,如图2中远处的门框高度或近处的石柱高度像素值,像素值显示于图像的信息栏上(D1值,注意标尺栏的单位需切换为像素)。此像素值除以原始图像(未扩大画布前的图像)的纵向或横向总像素值D再乘以该照相机的CCD或CMOS感光器件的纵向或横向尺寸,即得到h值。

图2 物距测算示意图
用公式表示为:

其中,D1为影像h(如门框)在图像中的纵向或横向像素值,D为图像的纵向或横向总像素值。
不同品牌型号的数码照相机选用的CCD或CMOS的尺寸不尽相同,可以上网搜索数码照相机的详细参数获得。譬如,Canon EOS 650D数码单反相机采用APS-C规格的新型CMOS图像传感器,靶面尺寸约22.3mm×14.9mm;Nikon D7100数码单反相机采用APS画幅的CMOS图像传感器,靶面尺寸约23.5mm×15.6mm。
用上述方法可以比较精确计算图2中的远处的门框所在平面与照相机之间的距离(即物距,B点是照相机位,严格地讲是照相机的光心所在位置)。同样也可计算图像中其他景物对焦平面(与照相机光轴垂直的虚拟平面)与照相机之间的垂直距离(即物距),如图3中的石柱与照相机之间的物距,图中OB长度。O点为照相机光轴与景物焦平面的相交点,也就是图像中的几何中心点。

图3 摄影者(摄影机位)方位作图推算
欲知照相机与被摄景物的直线距离,如图2中的AB的实际距离,尚需先求解AO的实际距离(石柱A到镜头光轴的垂直距离),再利用直角三角形AOB计算。而要求解AO的实际距离,必须首先求解AO在图像中的影像尺寸大小,再利用石柱A影像的成像放大倍率换算出AO的实际距离。
具体计算步骤如下:
(1)在Photoshop窗口中,用度量工具仔细测量AO的像素值,利用公式(4),得到AO的影像大小。
(2)石柱所在平面成像放大倍率M=石柱A的影像高度/石柱A的实际高度,其中石柱A的影像高度通过公式(4)计算获得。石柱A的实际高度通过现场测量获得。
(3)AO的实际距离=AO的影像大小/M。
(4)AB的实际距离=(实际距离AO2+物距OB2)的平方根,即
1.2摄影者(摄影机位)方位的推算
从图2我们虽然可以计算出摄影者与石柱A的距离以及物距OB的大小,并大体上可以判断O点的位置,从而依据直角三角形AOB计算出∠ABO的大小,在现场寻找确定B点位置。但是,O点的位置在实际场景中并不容易准确确定,较好的办法是再选择利用现场照片中另一个景物作为参照系(如图3中的立柱C),依照石柱A的物距计算法,推算出直角三角形COB的各边长度,由于石柱A、立柱C在现场实际场景中的位置是确定的,∠ABC的大小可以依据直角三角形AOB、COB计算的,最终利用激光测距仪(Leica DISTO D5激光测距仪)等测量工具可以准确锁定B点的方位。
2 案例应用
2.1简要案情与破案经过
2012年1~4月,浙江省的多个县、区的居民住宅小区发生系列入室盗窃案件,经技术部门勘查分析结合遗留的现场鞋印和雨天模糊视频资料共串并12起,涉案总价值15万余元,选择作案的时机均为雨夜黄昏期间,选择的作案场所均为中高档小区的1~2楼商品房,作案手段均为撑雨伞、戴手套、攀爬落水管、钻窗侵入,选择的财物均为现金、数码产品、烟酒、首饰等,且案犯反侦查意识非常强,现场很少遗留有价值的线索。经多日侦查,专案组对被盗的物品进行布控中发现重大线索。据某物资回收店老板反映,有一名陌生男子近期曾到该回收店出售过一台数码相机,目前还在店内未处理。经侦查员对该台数码相机进行初步检查,并与受害人电话联系,发现与前期某小区内发生的一起盗窃案中被盗赃物吻合,侦查员在对该数码相机进行查看时,发现该数码相机内已拍摄了部分照片。经询问回收店老板,老板否认是其拍摄的。经仔细查看照片,侦查员发现拍摄时间是该案案发后的时间,侦查员大胆猜测该照片极有可能是犯罪嫌疑人自己拍摄的。一个以照片找拍照地点的思路马上在侦查员脑海中浮现,经侦查员对相机内的照片进行仔细分析,认为其中的一张照片(图4)应该是从某楼房高处向外拍的,而且拍摄的地方大体上是在城区的某条路段上。尽管范围已明显缩小,但还无法通过照片确定具体拍摄位置。专案组决定派一路经验丰富的侦查员前往该区域进行走访调查,另一路继续通过照片分析研究具体拍摄位置,最终通过测算确定该路段上其中一家的某小型旅馆的三楼某沿街客房就是拍摄照片的位置。据此,锁定了犯罪嫌疑人。
2.2物距计算与摄影现场重建
查看涉案照片文件属性显示:本案中的被盗数码相机品牌型号是索尼DSC-H9(图1)。经网上查询得知,该款数码相机系于2007年5月15日正式上市,采用1/2.5英寸,810万有效像素“Super HAD”CCD,15倍光学变焦卡尔蔡司镜头。为进一步查明该款照相机CCD的靶面尺寸以及所用的焦距是否属于标准焦段,通过查阅了相关资料获悉,早期的数码相机CCD/CMOS靶面尺寸表示方法来源于早期的摄像机成像器件——光导摄像管。在CCD出现之前,摄像机是利用一种叫做“光导摄像管(Vidicon Tube)”的成像器件感光成像的,这是一种特殊设计的电子管,其直径的大小,决定了其成像面积的大小。因此,人们就用光导摄像管的直径尺寸来表示不同感光面积的产品型号。CCD出现之后,最早被大量应用在摄像机上,也就自然而然沿用了光导摄像管的尺寸表示方法,进而扩展到所有类型的图像传感器的尺寸表示方法上(表1)。由表1查询得知,1/2.5英寸的CCD靶面尺寸宽度为5.760mm,高度为4.290mm。照片拍摄当时所用的焦距值是10mm,根据表1中对应的转换系数(6.024),相当于用35mm电影胶片尺寸(36mm×24mm)拍摄时的镜头焦距为60mm,属于标准镜头的视角,图像无视觉变形。
根据本文第二部分的摄影者(摄影机位)方位的推算方法,首先在Photoshop窗口中打开照片,并通过向摄影者的方位适当扩大画布大小,以便后期作图时设定虚拟的摄影机位(B点)。其次,在照片中选取前方两处建筑物的适当位置作为测量计算的定位点线。该定位点线的选择要求定位明确,能够在图中和现场建筑物中确切定位,如图5中的A点和C点,用度量工具分别在图中量取过A点的景物H2的图像的像素值D2和过C点的景物H1的图像像素值D1。在现场用激光测距仪或其他测量工具分别量取H1、H2的实际高度。
根据公式(4)公式(3)公式(2)我们可以依次求出图像中的BO、BD、BA、BC值的大小,以及∠ABO、∠CBD的大小。要注意图5中的O点和D点实际上为非重合的两个点(虚拟点)(图6)。这是因为C点所在景物平面距离照相机远,A点所在景物平面距离照相机近,两个物方对焦平面并非在一个平面上,俯视照相示意图说明了摄影当时各个点位的关系。
最后,利用三角形ABC中已知的BA、BC长度及∠ABC(∠ABC=∠ABO+∠CBD)的大小,利用三角函数中的余弦定理:对于边长为a、b、c而相应角为A、B、C的三角形,有:
可以计算出AC的距离以及∠ACB、∠BAC的大小,这样就可以实现在摄影现场使用激光测距仪、三脚架、大号量角器等测量工具进行定点、定角度、定距离地逆推出照相机的位置(B点)。

图4 数码相机拍摄的照片

图5 摄影者(摄影机位)方位作图推算
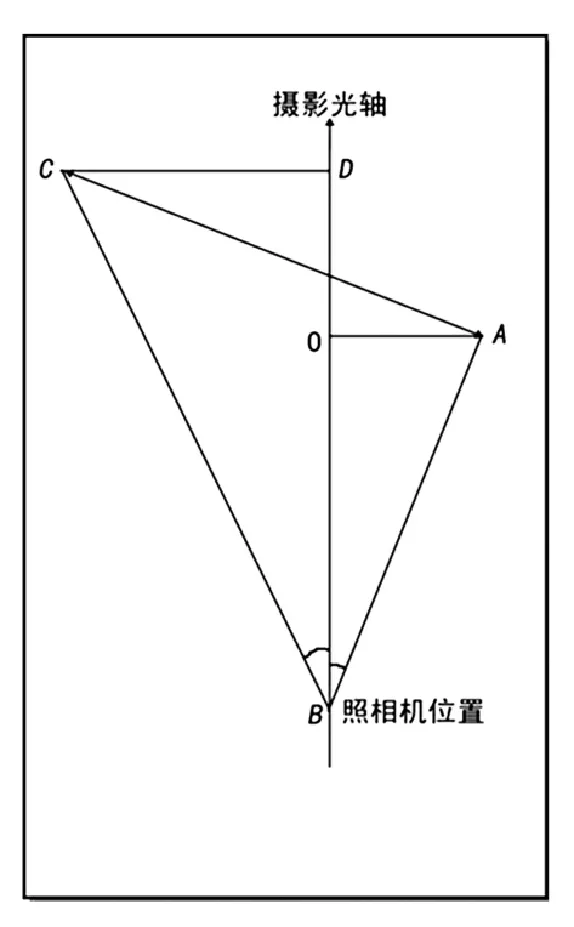
图6 俯视照相示意图

表1 CCD/CMOS靶面尺寸各型号一览
3 讨论
本方法建立的摄影物距计算以及摄影者方位推断适用于可知的原始摄影参数的数码照片。换言之,就是数字图像的EXIF信息未被删除或人为的修改,如果照相机中的照片被删除,或数字图像的EXIF信息被删除或人为的修改,当通过数字图像原始性的检验[4]和数字图像恢复技术才能使用。
拍摄照片时所用的镜头焦距以相当于标准镜头的焦距或长焦镜头所拍的图像计算出来的值更加接近实际值,广角或超广角镜头成像畸形变形较大,误差也随之增大。
选择测量目标景物时尽可能选择那些垂直于主光轴的建筑物轮廓线、电灯立柱等易于定位的点和线,也就是如图5中那些基本上平行于OB轴线的H1、H2轮廓线。对仰视、俯视摄影造成明显倾斜变形的还要考虑变形修正,计算将变得复杂。显然,最简单的情形莫过于照相机光轴垂直面对景物平面(如建筑物的墙面),原理如同痕迹物证的垂直摄影法那样,变形系数几乎为零,误差也就越小。
作图选择点位时尽可能做到细腻精准,根据公式(4)和公式(3),图像中的D1(像素值)测量误差增大,必导致物距u的误差增大,累计的误差就会较大。同时,在选择D1时,应尽可能选择那些景物轮廓线较长的部位,就好比我们用比例尺校验鞋印等痕迹大小时,要尽可能用较长的比例尺一样。
本方法建立的摄影物距计算以及摄影者方位推断一般只适用于成像相对清晰的空间景物,也即是处于成像清晰的景深范围之内,依据超出景深的模糊像推算物距误差将明显增大。
摄影现场重建是建立在数字图像和景物场景两者俱在的情形下,依据可知的图像信息和可测量的实际数据重建摄影者的方位距离,虽然有一定误差,但误差一般仅在0.2%~1%以内。也就是依据距离景物100m远处拍摄的照片,推算摄影者的方位误差大约在半径1m以下的范围内,显然这是可以接受的误差。
4 结论
依据摄影成像原理结合应用商用图像处理软件(ACDSee、Adobe Photoshop)可以实现对数码照片中的目标物与摄影机位的距离(即物距)的理论推算,推算的物距与实际物距的误差在0.2%~1%以内,在满足一定拍摄条件下可借助数码影像资料还原当时摄影者的具体方位,对摄影现场重建具有实际的应用价值。
参考文献:
[1]马文元.刑事照相与录像教程[M].北京:群众出版社,2000:9-35.
[2]许刚,董士崇.EXIF格式浅析及读取[J].电脑开发与应用,2005,(3):39-41.
[3]刘猜.利用Exif信息内容鉴定数码照片[J].中国司法鉴定,2010,(5):49-51.
[4]单大国,董岩,冯泊.基于数字图像EXIF信息进行原始性检验研究[J].甘肃警察职业学院学报,2008,6(4):63-66.
(本文编辑:卞新伟)
Calculation of Object Distance and Scene Reconstruction Based on Digital Photo
FENG Yong-ping,MAN Qin
(Zhejiang Police College,Hangzhou 310053,China)
Abstract:Objective To establish a method for calculating the object distance,i.e. the distance between the target and camera,in digital photos. Method Based on the imaging principles,the commercial image processing software of Acdsee and Adobe Photoshop were used to complete the calculation of object distance. Results The errors between the calculated object distances and the actual object distances were generally within 0.2%-1%. Conclusion Under certain shooting conditions,digital images can be used to restore the location of photographer,which is of practical value for scene reconstruction.
Key words:digital photo;digital image;EXIF;object distance;scene reconstruction
中图分类号:DF793.2
文献标志码:A
doi:10.3969/j.issn.1671-2072.2016.03.010
文章编号:1671-2072-(2016)03-0058-06
收稿日期:2015-05-08
基金项目:浙江警察学院校级合作项目(20140603)
作者简介:冯永平(1965—),男,副教授,硕士,主要从事刑事科学技术与犯罪现场重建研究。E- mail:fengyongping@zjjcxy.cn。
猜你喜欢
湖南理工学院学报(自然科学版)(2022年1期)2022-03-16
锦绣·上旬刊(2020年3期)2020-06-08
北京档案(2020年4期)2020-04-27
理科考试研究·初中(2018年10期)2018-12-11
艺术品鉴证.中国艺术金融(2018年12期)2018-08-26
艺海(2018年3期)2018-05-17
办公室业务(2017年17期)2017-11-25
中学物理·初中(2017年4期)2017-05-31
中国市场(2016年45期)2016-05-17
中央民族大学学报(自然科学版)(2015年2期)2015-06-09
