
磁路法与有限元法相结合的磁悬浮人工心脏泵驱动电机设计*
2016-06-04 05:56张文山刘淑琴
电机与控制应用 2016年4期
张文山, 刘淑琴
(1. 国网德州供电公司,山东 德州 253000;2. 山东大学 电气工程学院,山东 济南 250061)
磁路法与有限元法相结合的磁悬浮人工心脏泵驱动电机设计*
张文山1,刘淑琴2
(1. 国网德州供电公司,山东 德州253000;2. 山东大学 电气工程学院,山东 济南250061)
摘要:介绍了一种可用于轴流式磁悬浮人工心脏泵的无槽式永磁无刷直流电动机。电机具有大气隙、高转速特点。电机本体采用经典磁路法和有限元辅助分析相结合的方法研制而成。试验结果表明,电机运行平稳、转速高、噪声低、发热小,有限低电压下调速范围宽,调速曲线在不超过空载转速范围内近似一条直线,证明了设计方法合理有效。
关键词:磁悬浮; 人工心脏泵; 无槽式永磁无刷直流电机; 有限元
0引言
心力衰竭是影响人类健康的重大疾病之一,而人工心脏泵作为一种部分或完全替代心脏泵血功能的机械装置,能够帮助衰竭心脏完成血液循环功能,给患者带来了新的希望。轴流式磁悬浮心脏泵以其体积小、质量轻、能有效地解决血栓和溶血问题等优点,已经成为全球人工心脏泵研究的重点和热点[1],而电机是人工心脏泵的研制过程中的关键。目前,国内人工心脏泵的驱动电机多为有槽电机。这些电机结构简单、输出转速高,但是存在齿槽效应,使人工心脏泵在运行平稳性、噪声等方面略显不足[2]。为降低心脏泵噪声,改善其运行性能,使其能更好为病人的生活服务,笔者设计了一种无槽式永磁直流无刷电动机。无槽式永磁直流无刷电动机不仅具有普通无刷直流电机调速性能优良、可靠性高、免维护、无换向火花等优点,而且具有无齿槽效应、电枢电感小、绕组散热条件好等特点,特别适用于轴流式磁悬浮人工心脏泵系统。心脏泵整体结构要求本文设计的电机具有工作气隙大、体积小的特点;电机工作环境要求电机具有转速高、调节方便的特点。这都给电机的设计增加了难度。为此,采用经典磁路法与有限元软件Maxwell 2D辅助分析相结合的方法对心脏泵电机进行设计,并进行了试验验证分析。限于篇幅,本文不讨论控制系统以及磁悬浮支撑的相关内容。
1磁悬浮人工心脏泵及电机结构
1.1磁悬浮心脏泵总体结构[2]
本文设计的一种磁悬浮人工心脏泵采用径向永磁轴承和轴向电磁轴承相结合的悬浮系统,实现五自由度全悬浮。其结构如图1所示,由前导叶、叶轮转子、后导叶、电动机、轴向电磁轴承、径向永磁轴承和外壳等组成。心脏泵转子位置由霍尔位移传感器进行实时监测,并由外部的主动磁悬浮支撑控制系统实现位置的实时控制。转子与定子之间没有机械接触。
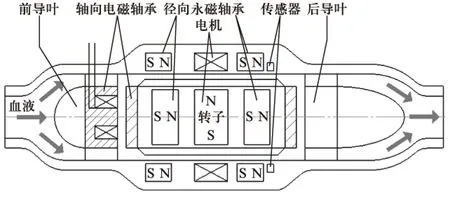
图1 磁悬浮人工心脏泵的结构图
泵的驱动电机位于整个结构的中部,电机的定转子与血液接触部分用医用钛合金包裹,转子与磁轴承的转动部分组装为一体,电机转子在定子旋转磁场的作用下,带动叶轮旋转。
1.2驱动电机特点与结构
本课题最终设计的电机的结构如图2所示。电动机由杯形绕组、定转子铁心和圆环形永久磁铁组成。杯形绕组采用叠型双层绕线形式,A、B、C三相绕组各占120°均匀对称分布,每匝线圈的跨距为一个极距。图2中间部分为圆环形永久磁铁(电机转子),采用NdFePn_N45H材料,沿径向上某个方向平行充磁。电机定转子铁心均采用导磁性能好的电工纯铁。

图2 电机截面图
为与磁轴承转子相配合,电机采用内转子结构。由于心脏泵叶轮和钛合金的存在,使得该电机比普通无槽无刷直流电机的气隙更大。本课题需为叶轮和钛合金留有2.6mm的空间,如图2所示。
2电机设计
为设计出满足要求的电机,本课题采用经典磁路法设计与有限元软件Maxwell 2D辅助分析相结合的方法对心脏泵电机进行设计。具体设计过程如图3所示。

图3 人工心脏泵驱动电机设计流程
2.1电机的初步计算[3-4]
2.1.1电机配用功率的计算
电机配用功率是电机设计的重要参数,与设计的叶轮结构密切相关。由北京航空航天大学为该课题设计的叶轮结构在额定转速5500r/min下,血泵进出口压力差能达到120mmHg,血流量能达到5L/min,泵的效率为23%。由此可以计算出泵的扬程、泵的轴功率,进而计算出电机的配用功率,如式(1)~式(3)所示。
(1)
式中:H——泵的扬程;
p1、p2——泵进出口处液体的压力;
Z1、Z2——考虑泵体直立时的进出口高度;
ρ——血液密度;
g——重力加速度。
(2)
式中:pa——轴功率,即泵的输入功率;
Q——血液的体积流量;
ηp——泵的效率,由叶轮机构决定。
(3)
式中:PN——电机配用功率;
ηt——泵传动装置效率;
K——原动机功率富裕系数。
2.1.2定子设计
永磁无刷直流电机与一般电磁式直流电动机一样,也必须满足定子尺寸、电机容量、转速和电磁负荷之间的一定关系,即
(4)
式中:Da——电枢直径;
la——电枢铁心计算长度;
P′——计算容量;
ai——计算极弧系数;
Kφ——磁场波形系数;
Kw——绕组系数;
A——线负荷;
Bδ——气隙磁密。
对于连续工作状态的小功率电动机,其计算容量为
(5)
2.1.3转子的设计
当永磁材料沿充磁方向的厚度不断增加时,磁性能会不断加强;但厚度增加到一定值时,磁性能增加量会趋于平缓。因此,对于所采用的转子结构,总能找到一个最佳的内径,使转子质量尽量轻的情况下能够提供最大的磁性能。
本课题设计转子永磁材料采用NdFePn_N45H,磁性能如表1所示。转子磁钢外径一定的情况下,内孔半径为Rr,转子长度为L。利用电机磁场数值计算,当Rr从0到Rm变化时,求得电枢处径向磁感应强度与内孔半径的关系曲线图如图4所示。选用径向磁感应强度最大的Rr为最佳孔半径。

表1 转子材料磁性能

图4 磁钢外径为20mm时Brm-Rr关系曲线图
2.1.4电枢绕组计算
电枢绕组每相匝数wφ:
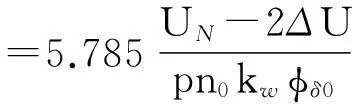
(6)
式中:UN——电机额定电压;
ΔU——晶体管的饱和管压降;
n0——空载转速;
kw——电枢绕组的绕组系数;
φδ0——空载时每极气隙磁通量。
2.1.5电机主要参数
经过计算得出电机的主要参数如表2所示。
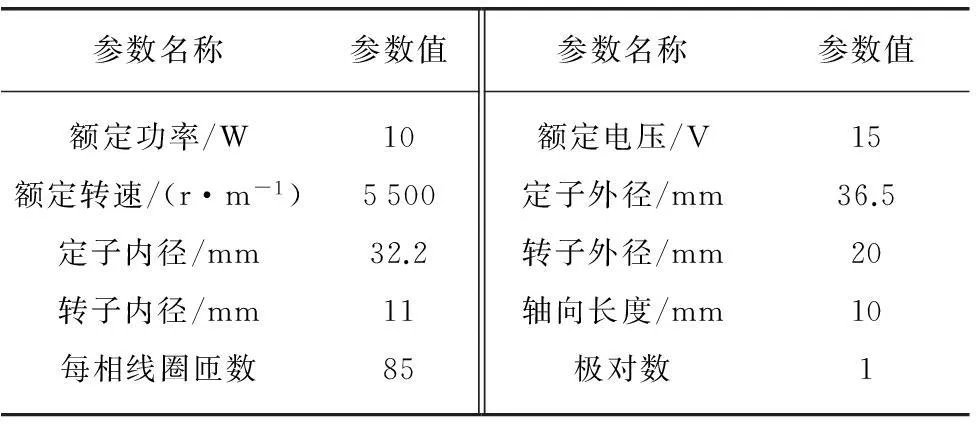
表2 电机主要参数
某些参数是按照图3所示的过程反复优化的结果。
2.2电机的有限元分析[5]
为了验证上述参数的合理性,本文利用Maxwell 2D建立了模型,进行了有限元分析。
2.2.1静态场分析
有限元网格剖分结果如图5所示。

图5 网格剖分结果
经过求解得到气隙磁场分布如图6所示,可见气隙磁场具有良好的正弦性。
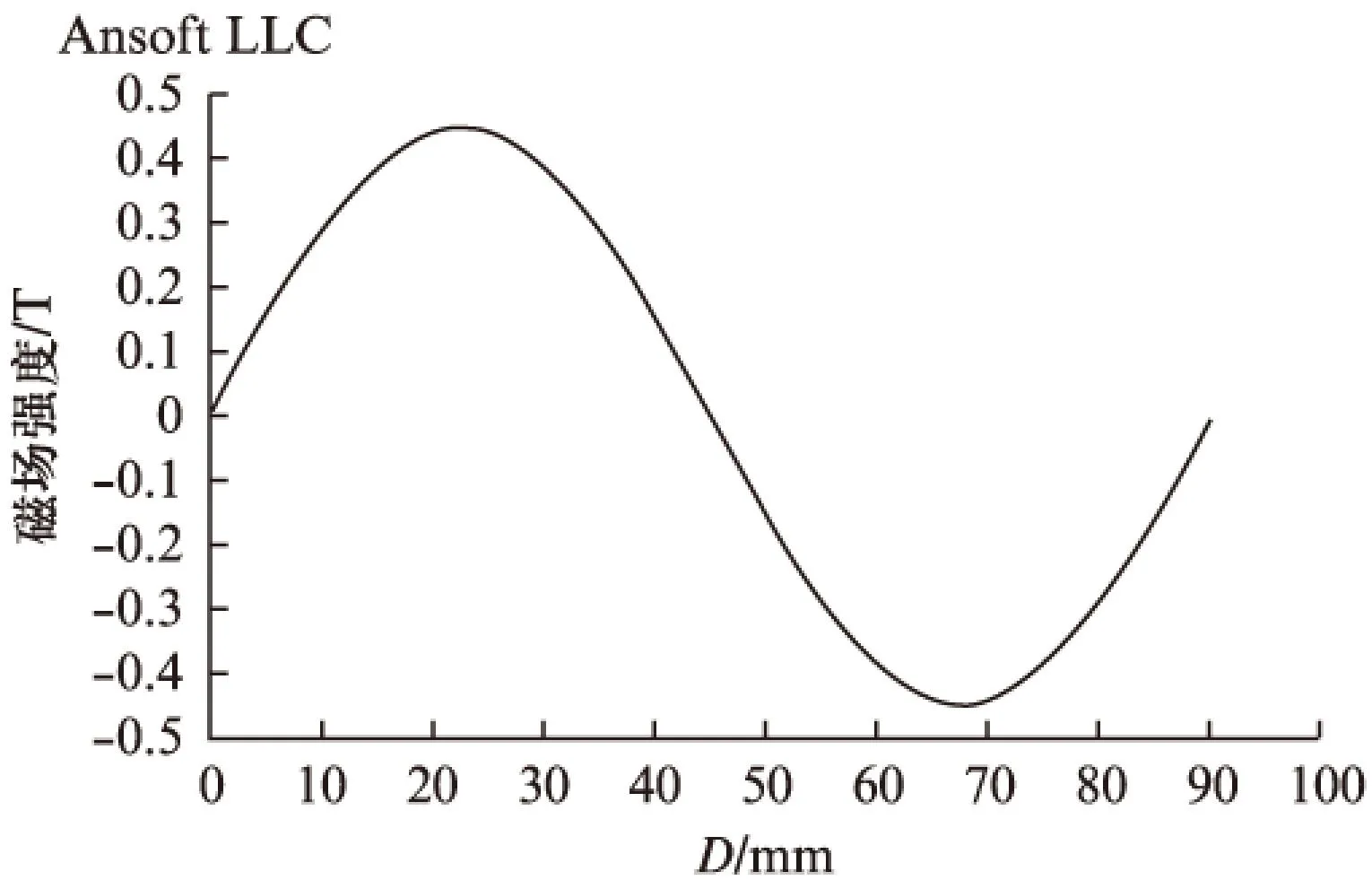
图6 气隙磁场
电机铁心材料是否出现磁饱和现象是评价电机磁路设计的一项重要指标。通过仿真电机的磁密分布,可以看出电机的铁心是否饱和。图7为磁密云图,可以看出电机最高磁密不超过1.45T,电机定子铁心未出现磁密饱和现象。

图7 磁密云图
2.2.2瞬态场分析
本文为绕组所加的激励源外电路如图8所示。外电路中S1-S6为受Vg1~Vg6控制的开关(高电平为打开,低电平为关断)。Vg1~Vg6为在不同时刻开起高电平的6个位置控制型脉冲电源,以实现三相绕组两两导通六状态工作制。

图8 绕组激励源的外电路图
经过计算可以得到电机启动过程中的一些特性曲线,见图9~11。

图9 起动过程中的速度波形

图10 起动过程中的转矩波形
从仿真波形可知,电机起动电流约为3.3A,启动转矩约为0.05N·m。电机可以在大约0.4s 时间内平滑起动,具有良好的起动特性。在额定负载下,电机最终稳定运行转速约为 5500r·m,满足设计要求。

图11 起动过程中的三相电流波形
3试验分析
磁悬浮人工心脏泵驱动电机采用两相导通星形三相六状态的运行模式。控制系统的硬件电路部分采用ML4425、IR2103、HCF4069等芯片组成方波产生与调频及开关管驱动电路[7]。人机接口界面主要有电源开关、工作指示灯、转速显示窗口及转速调节旋钮。图12(a)所示为加工制作完成的控制器电路板;图12(b)所示为控制器外部界面。

图12 电机控制器
图13所示为研制的心脏泵封闭式试验系统装置,电机位于内部中间处。在转子稳定悬浮的状态下,开起电机控制器,实现电机的闭环锁相稳定旋转。此时下桥控制信号出现PWM斩波,调节ML4425管脚8外接的滑动变速器,可实现电机的调速功能。

图13 心脏泵封闭式试验系统
图14所示为调速试验时的界面,信号1为转子位置悬浮信号,2为A相上桥控制信号,信号3为ML4425管脚8的电位信号。试验时,通过调节滑动变阻器改变信号3的电位,读取信号2的频率,可计算出电机的转速。表3列出了试验得到的脚8的电位与A相上桥控制信号周期时间、A相上桥控制信号频率、电机转速的对应关系表,并绘制了图15的调速曲线图。

图14 调速试验时示波器界面

调节电压Ut/V上桥开断频率/Hz电机转速n/(r·min-1)2.2817.041022.42.6221.211272.62.8625.381522.83.1029.551773.03.3433.722023.23.6037.592255.43.8041.682500.84.0645.752745.04.3049.522971.24.5553.683220.84.7957.653459.05.0361.623697.25.2765.663939.65.5069.724183.25.7573.714422.66.0277.654659.06.2481.734903.86.4885.595135.46.7289.755385.06.9092.635557.87.0092.635557.87.1092.635557.87.2092.635557.8

图15 电机调速曲线
试验结果表明,系统以较高的精度实现了闭环稳定运行,旋转平稳,噪声低,发热小,抗干扰能力强,可在1022~5557r/min范围内无级调速,满足了心脏泵的各项性能指标要求。
4结语
本文介绍了一种应用于轴流式磁悬浮人工心脏泵的无槽式永磁无刷直流电动机。该电机本体采用经典磁路法与Maxwell 2D有限元分析相结合的方法设计完成,具有计算快捷和精度高的特点。经实验验证,研制的电机可以在短时间内平滑起动,达到额定转速5500r/min,同时可以在1200~5500r/min范围内无级调速,效率高,电机噪声小,运行平稳,可连续工作。由此可见,设计电机的各项性能均满足指标要求,所采用的方案和设计方法合理有效,对心脏泵电机的设计具有一定的借鉴作用。
【参 考 文 献】
[1]刘淑琴,边忠国,李红伟,等.磁悬浮轴承人工心脏泵的研究[J].中国科技成果,2009(4): 14-16.
[2]杨晟,刘淑琴,关勇.轴流式磁悬浮人工心脏泵驱动电机的研究[J].中国机械工程,2010(4): 893-896.
[3]唐任远.现代永磁电机理论与设计[M].北京: 机械工业出版社,1997.
[4]叶金虎.现代无刷直流永磁电动机的原理与设计[M].北京: 科学出版社,2004.
[5]许志伟,谢卫才,林友杰,等.基于Ansoft的开关磁阻电机设计和有限元分析[J].防爆电机,2009(4): 14-17.
[6]黄国治,傅丰礼.中小旋转电机设计手册[M].北京: 中国电力出版社,2007.
[7]刘刚,王志强,房建成.永磁无刷直流电机控制技与应用[M].北京: 机械工业出版社,2008.
Design of Drive Motor for Magnetic-levitation Artificial Heart Pump Combining Magnetic Circuit Design and FEA*
ZHANGWenshan1,LIUShuqin2
(1. Dezhou Power Supply Company of The State Grid, Dezhou 253000, China;2. College of electrical engineering, Shandong University, Jinan 250061, China)
Abstract:A kind of brushless DC motor which can be used for axial-flow maglev artificial heart pump was introduced. The motor has characteristics of large air gap and high-speed. The motor body was developed by the method of combining the traditional magnetic circuit design and finite assistant analysis(FEA). The experimental results shows that the motor can run stably, has high speed and low noise, dissipate less hate, has wide speed regulation at limited-low voltage. The speed curve is approximately a straight line below the no-load speed point. This design approach is proved to be reasonable and effective.
Key words:magnetic-levitation; artificial heart pump; slotless brushless DC motor; finite element analysis(FEA)
收稿日期:2015-10-08
中图分类号:TM 302
文献标志码:A
文章编号:1673-6540(2016)04- 0071- 06
作者简介:张文山(1987—),男,硕士研究生,工程师,研究方向为配电运维管理和电机设计。刘淑琴(1958—),女,教授,博士研究生导师,研究方向为磁悬浮轴承理论及应用、垂直轴风力发电技术。
*基金项目:国家自然科学基金(51075236)
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
小猕猴智力画刊(2022年4期)2022-05-23
小学科学(学生版)(2021年4期)2021-07-23
上海节能(2020年3期)2020-04-13
装备制造技术(2019年12期)2019-12-25
天津医科大学学报(2019年6期)2019-08-13
军事文摘(2017年16期)2018-01-19
中学生数理化·八年级物理人教版(2017年6期)2017-11-09
中学生数理化·七年级数学人教版(2017年6期)2017-11-09
中国科技教育(2016年12期)2017-08-11
