
基于MRAS内置式永磁同步电机无位置传感器控制研究
2016-06-04 06:02张伯泽
电机与控制应用 2016年4期
张伯泽, 阮 毅
(上海大学,上海 200072)
基于MRAS内置式永磁同步电机无位置传感器控制研究
张伯泽,阮毅
(上海大学,上海200072)
摘要:对一种基于模型参考自适应系统(MRAS)的内置式永磁同步电机(IPMSM)无位置传感器矢量控制策略进行了研究。该控制策略仅需很少的参数就可以估算出电机转速。该控制策略中,IPMSM本身作为参考模型,将含有待估参数的IPMSM数学模型作为可调模型,这两个模型的输出之差驱动自适应律,从而获得估算转速。在MRAS中引入比例积分环节,提高了系统的动态性能。该控制策略实现了IPMSM在极低速0.5Hz下的运行。仿真结果表明: 提出的控制策略有良好的动态响应和稳态响应,估算转速有较高的精度,系统有较强的鲁棒性,IPMSM在极低速下运行良好。
关键词:内置式永磁同步电机(IPMSM); 模型参考自适应; 无位置传感器控制
0引言
内置式永磁同步电机(Interior Permanent Magnet Synchronous Motor, IPMSM)因具有体积小、质量轻、响应快、损耗小、功率密度大和效率高等优点而获得了广泛应用。IPMSM可实现控制精度高、动态性能好、调速范围宽等优越的调速控制[1-2]。通常情况下,对IPMSM转速和转矩的精确控制,是用位置或速度传感器实现的。然而,位置或速度传感器的安装需要额外的空间,且有位置或有速度传感器系统的成本高、可靠性低、不易维护。
为了消除位置和速度传感器,提出了各种控制策略,比如Kalman滤波器法[3-4]、状态观测器法[5-6]、滑模控制法[7-8]、高频信号注入法[9-10]、人工智能法[11]等。
在众多无位置和无速度传感器控制策略中,模型参考自适应(Model Reference Adaptive System, MRAS)法[12-15]因为结构简单和稳定而被广泛采用。本文基于Popov超稳定理论,对基于MRAS的IPMSM无位置传感器控制进行了研究。该控制策略仅需很少的参数就可以估算出电机转速。该控制策略中,将不含待估参数的IPMSM本身作为参考模型,将含有待估参数的IPMSM数学模型作为可调模型,这两个模型有相同的输出物理量。参考模型与可调模型的输出之间存在偏差,用这个偏差构造一种自适应律,来调节可调模型中的待估参数。这样,控制目标的真实输出就可以追踪参考模型的输出,从而产生较准确的估算转速。最后,本文建立了系统仿真模型,对所提出的控制策略进行了验证。仿真结果表明: 本文提出的控制策略有良好的动态响应和稳态响应,估算转速有较高的精度,系统有较强的鲁棒性,IPMSM在极低速下运行良好。
1IPMSM的数学模型
在以转子磁场定向的同步旋转d-q坐标系中,IPMSM的电压方程为
(1)
磁链方程为
(2)
将式(2)代入式(1)整理并写为状态方程,则IPMSM的电流数学模型为
(3)
电磁转矩为
Te=np(ψsdisq-ψsqisd)=
np[ψfisq+(Lsd-Lsq)isqisd]
(4)
式中:usd、usq——定子电压直、交轴分量;
isd、isq——定子电流直、交轴分量;
Lsd、Lsq——直、交轴电感;
Rs——定子电阻;
np——电动机极对数;
ωr——IPMSM转子电气角速度;
ψf——转子永磁体产生的磁链。
本文采用的坐标变换前提是功率不变原则,所以上述电磁转矩算式(4)中电动机极对数np前的系数为1。
2基于MRAS的IPMSM无速度传感器矢量控制策略

(5)
(6)
(7)
(8)
则可得IPMSM可调模型的状态方程如下:
(9)
其中:
(10)
(11)
自适应律为
(12)
F1、F2分别如下:
(13)
其中:
(14)
(15)
(16)
e为广义误差,将式(13)、(14)、(15)和(16)代入方程(12),同时为了提高系统的动态性能,引入比例积分环节,则可得转速的自适应律为

ω^r= kp+kipæèçöø÷LsqLsdisdi^sq-LsdLsqisqi^sd-éëêê
(17)
对表面贴式IPMSM的Lsd=Lsq。则式(17)可简化为

ω^r= kp+kipæèçöø÷[isdi^sq-isqi^sd-
(18)
根据Popov超稳定理论,如果满足下列条件:
(1) 传递函数H(s)=C(SI-A)-1严格真实;


基于MRAS的IPMSM无位置传感器控制系统框图如图1所示。

图1 基于MRAS的IPMSM无位置传感器控制系统框图
3仿真研究
对提出的基于MRAS的IPMSM无位置传感器控制系统进行了仿真验证,负载为1N·m,电机运行速度范围从极低速30r/min(对应0.5Hz)至高速3600r/min,仿真结果如图2~图6所示。
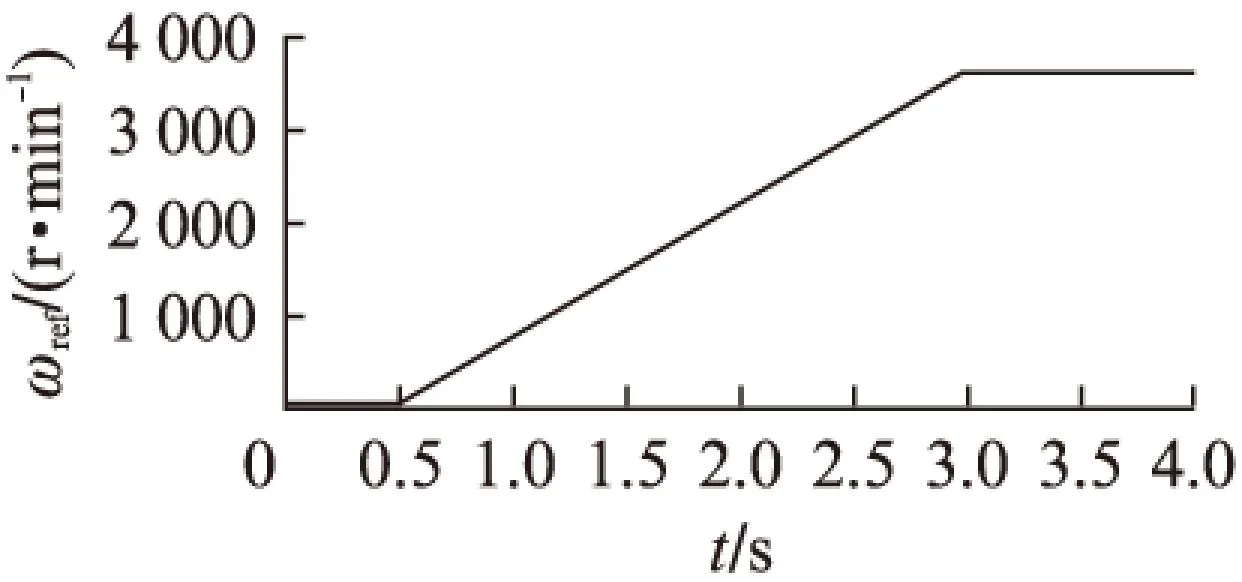
图2 IPMSM的参考转速

图3 IPMSM的估算转速
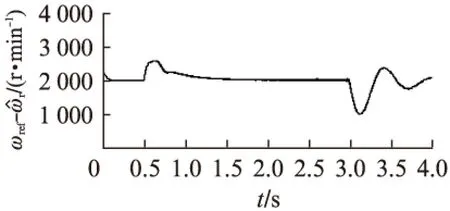
图4 IPMSM估算转速与参考转速之差

图5 IPMSM转子估算位置(前段展开)

图6 IPMSM转子估算位置(后段展开)
IPMSM的参数如表1所示。

表1 IPMSM的参数
从仿真波形可以看出,基于MRAS的IPMSM无位置传感器控制策略具有良好的动态响应和稳态响应,在极低速0.5Hz下仍运行良好,转速估算在稳态时具有较高的精度。
4结语
本文对基于MRAS的IPMSM无位置传感器控制策略进行了研究。该控制策略仅需很少的参数就可以估算出电机转速。该控制策略中,将不含待估参数的IPMSM本身作为参考模型,将含有待估参数的IPMSM数学模型作为可调模型,这两个模型有相同的输出物理量。参考模型与可调模型的输出之间存在偏差,用这个偏差构造一种自适应律,来调节可调模型中的待估参数。这样,控制目标的输出就可以追踪参考模型的输出,从而产生较准确的估算转速。
最后,本文用仿真对所提出的控制策略进行了验证。仿真结果表明: 研究的控制策略具有良好的动态响应和稳态响应,估算转速有较高的精度,系统有较强的鲁棒性,IPMSM在极低速下运行良好。
【参 考 文 献】
[1]ACARNLEY P P, WASTON J F. Review of position-sensorless operation of brushless permanent-magnet machines[J]. IEEE Transactions on Industrial Electronics, 2006,53(2): 352-362.
[2]张伯泽,阮毅.内置式永磁同步电机最大转矩电流比控制研究[J].电机与控制应用,2015,42(2): 13-15.
[3]BOLOGNANI S, TUNIANA L, ZIGLIOTTO M. Extended kalman filter tuning in sensorless PMSM drives[J]. IEEE Transactions on Industry Applications, 2003,39(6): 1741-1747.
[4]CAUX S. Kalman filter and redundant observer comparison for sensorless PMSM velocity control[C]∥IEEE International Symposium on Industrial Electro-nics, 2005: 887-892.
[5]SHINNAKA S. New sensorless vector control using minimum-order flux state observer in a stationary reference frame for permanent magnet synchronous motors[J]. IEEE Transactions on Power Systems, 2006, 53(2): 388-398.
[6]JONES J A, LANG J H. A state observer for the permanent-Magnet Synchronous Motor[J]. IEEE Transactions on Industrial Electronics, 1989,36(3): 374-382.
[7]LI C, ELBULUK M. A sliding mode observer for sensorless control of permanent magnet synchronous motors[C]∥Proceedings of IEEE Industry Applications Society Annual Meeting, Chicago, 2001: 1273-1278.
[8]ZHOU F, LI B Z, YANG J G. A sliding mode speed/position observer integrated with a PI controller for PM synchronous motors[C]∥ IEEE International Conference on Robotics and Biomimetics, 2007: 1372-1377.
[9]JANG J H, HA J I. Analysis of permanent-magnet machine for sensorless control based on high-frequency signal injection[J]. IEEE Transactions on Industry Applications, 2004,40(6): 1595-1604.
[10]CORLEY M J,LORENZ R D. Rotor position and velocity estimation for a salient-pole permanent magnet synchronous machine at standstill and high speeds[J].IEEE Transactions on Industry Applications, 1998,34(4): 784-789.
[11]BATZEL T D, LEE K Y. A diagonally recurrent neural network approach to sensorless operation of the permanent magnet synchronous motor [C]∥Proceedings of IEEE Industry Power Engineering Society Summer Meeting, Seattle, WA, 2000: 2441-2445.
[12]LIANG Y, LI Y. Sensorless control of PM synchronous motors based on MRAS method and initial position estimation[C]∥Proceedings of IEEE International Conference on Electrical Machines and Systems, Beijing, China, 2003: 96-99.
[13]KIM Y S, KIM S K, KWON Y A. MRAS based sensorless control of permanent magnet synchronous motor[C]∥Proceedings of IEEE Annual Conference of the Society of Instrument and Control Engineering, Fukui, Japan, 2003: 1632-1637.
[14]YAN R Z, LI B Z, ZHOU F.Sensorless control of PMSMs based on parameter-optimized MRAS speed observer[C]∥Proceedings of IEEE International Conference on Automation and Logistics, Qingdao, China, 2008: 1573-1578.
[15]RASHED M, MACCONNEL P, STRONCACH A, et al. Sensorless indirect rotor field orientation speed control of permanent magnet sycnchronous motor using adaptive flux estimator [C]∥Proceedings of IEEE International Conference Decision and Control, Seville, Spain, 2005: 647-652.
Research of Interior Permanent Magnet Synchronous Motor Sensorless Control Based on MRAS
ZHANGBoze,RUANYi
(Shanghai University, Shanghai 200072, China)
Abstract:One novel control strategy for IPMSM sensorless control based on MRAS was presented. This control strategy can estimate the rotor speed with a few parameters. IPMSM itself was selected as reference model, and the mathematical model of IPMSM which includes estimated parameters was regarded as adaptive model. The output error of these two models was used to drive the adaption mechanism and the estimated speed was obtained. Also the PI control in MRAS to increase the dynamic performance was introduced.Using this control strategy, IPMSM could work under very low speed condition of 0.5Hz. The simulation results verify the proposed control strategy was effective, it had excellent dynamic and static responses, the estimated speed had good precision and the system was robust and could still work well in the very low speed range.
Key words:interior permanent magnet synchronous motor(IPMSM); model reference adaptive system(MRAS); sensorless control
收稿日期:2015-09-15
中图分类号:TM 351
文献标志码:A
文章编号:1673-6540(2016)04- 0013- 04
作者简介:张伯泽(1976—),男,博士研究生,研究方向为电力电子与电力传动。
阮毅(1955—),男,博士,教授,博士生导师,研究方向为电力电子与电力传动。
