
基于简化磁链法的SRM无位置传感器的研究
2016-06-04 05:56梅柏杉孟悦然刘东阳
电机与控制应用 2016年4期
关键词:神经网络
梅柏杉, 孟悦然, 高 宁, 刘东阳
(上海电力学院 电气工程学院,上海 200082)
基于简化磁链法的SRM无位置传感器的研究
梅柏杉,孟悦然,高宁,刘东阳
(上海电力学院 电气工程学院,上海200082)
摘要:为了提高开关磁阻电机(SRM)调速系统的适用范围,在直接转矩控制SRM的条件下,提出了一种基于简化磁链法的转子位置辨识方法。选取一条特定位置的电机磁链特性曲线,通过神经网络对磁链特性曲线进行拟合,与检测的实时磁链比较,输出比较脉冲信号,编译脉冲信号得到转子位置角。在MATLAB/Simulink环境下搭建了SRM转子位置辨识控制模型,对简化磁链法转子位置辨识进行了仿真。结果表明了简化磁链法能够简化控制系统,提高系统的可靠性。
关键词:开关磁阻电机(SRM); 转子位置辨识; 简化磁链法; 神经网络
0引言
开关磁阻电机(Switched Reluctance Motor, SRM)由于其结构简单、调速范围广、启动转矩大、抗干扰强等优点,在电力传动领域具有较好的发展前景。在SRM控制系统中,需要位置传感器来确定转子位置信号。传统的位置传感器如光电式传感器、霍尔传感器,结构复杂,减低了系统可靠性,并且限制了电机的应用领域[1]。因此无位置传感器控制是SRM研究的热点之一。
针对SRM位置辨识控制,国内外学者做了大量研究,提出了多种估计方法。小电流脉冲法[2]通过给各相注入短周期脉冲,比较各相响应电流大小来判断转子位置。该方法便于实现,但是无法估计转子初始位置,而且高速运行阶段不适用。磁链电流法[3]需要预先获得电机磁链-电流-转子位置的磁化曲线,并将其以三维表的形式储存,占用内存资源大。基于磁链电流法,本文提出一种简化磁链法,仅需要检测特定位置下的磁链特性曲线,可以大大减少内存需求,提高使用度。在Simulink平台下搭建控制系统,对SRM无位置传感器进行了仿真,验证了简化磁链法对于转子位置辨识的有效性和可靠性。
1简化磁链法的转子位置辨识原理
SRM运行中,假设忽略各相绕组互感影响,绕组磁链关于相电流和转子位置的关系如式(1)所示。
ψk=ψ(θ,ik)
(1)
式中:ψk——第k相磁链;
ik——第k相电流;
θ——转子位置角。
通过试验或者有限元分析可得各个角度下的电流和磁链的关系。磁链特性曲线如图1所示。
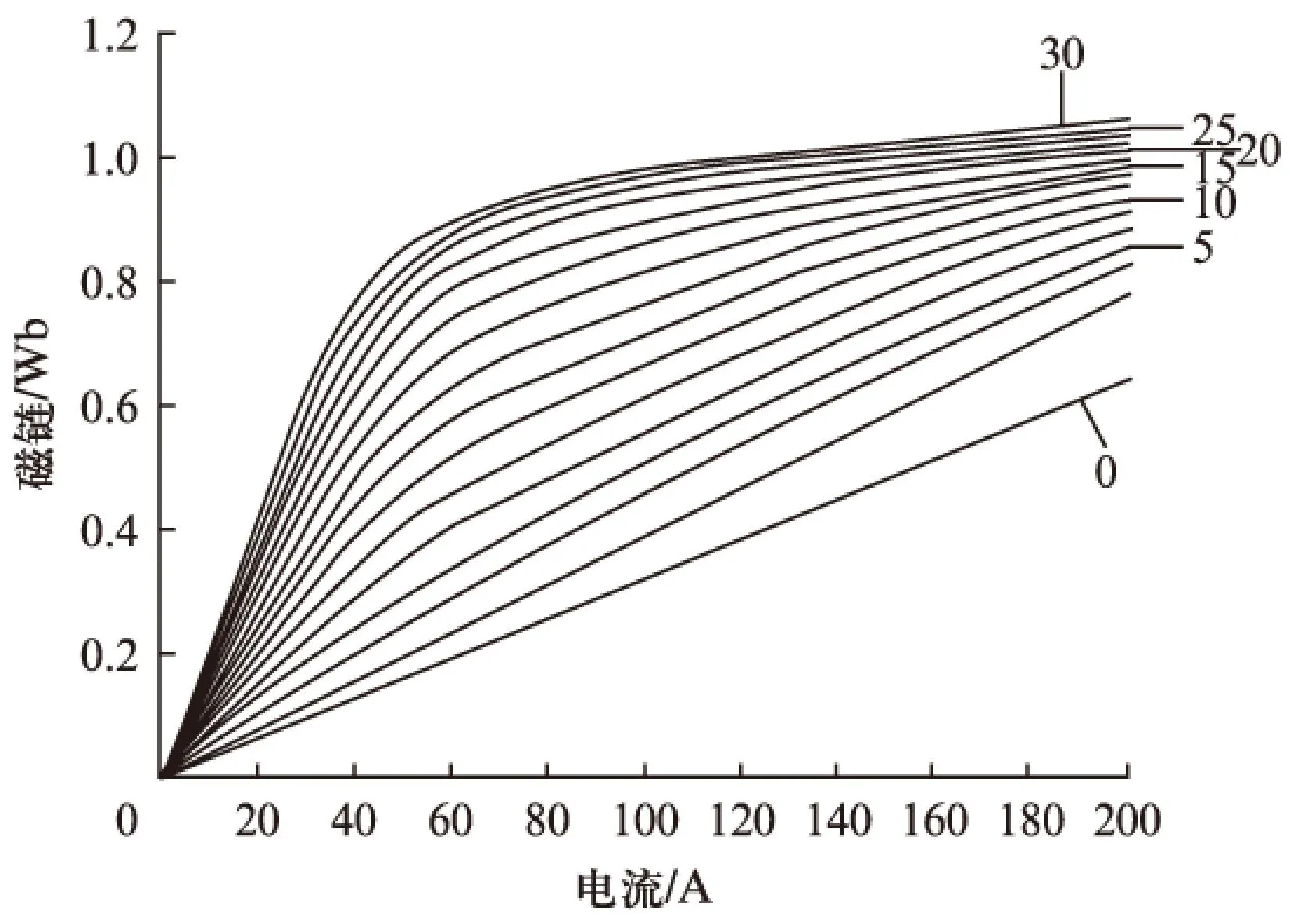
图1 各个角度下的磁链特性曲线
由图1中可知,每一个转子位置角都对应了一条磁链特性曲线,而且各个曲线之间无交点(除0点)。因此,式(1)可以写成转子位置角关于相绕组磁链和相电流的非线性函数:
θk=θ(ψk,ik)
(2)
由式(2),将图1中的数据建立三维数据库,或者利用神经网络拟合出磁链、电流和转子位置角的非线性函数。当给出某一时刻的磁链和电流,就能确定转子位置。但全周期磁链电流法的缺陷在于,要建立三维数据表非常繁琐,需要大量的存储空间,在计算时所占的内存庞大。
针对上述的问题,提出一种改进磁链法对转子位置进行辨识,选取某一特定转子位置的磁链特性曲线作为基准磁链特性曲线。基准磁链特性曲线是在θ=θf时磁链关于电流的函数。
(3)

θf——选取的基准角度。
根据电压平衡方程,电机第k相基本电压方程为[4]:
(4)
式中:Rk——第k相电阻;
ik——第k相电流;
ψk——第k相磁链。
由式(4)得出一相磁链方程为
ψk=∫(Uk-ikRk)dt
(5)
由式(5)可得,检测到某一时刻的绕组电压和电流,通过积分可以算出这一时刻的磁链。将实时磁链与参考磁链比较,得到转子位置的脉冲信号,应用测速算法得到转子位置角和转速。简化磁链法测速示意图如图2所示。

图2 简化磁链法测速原理图
在简化磁链法中,当A相转到基准位置θf,那么此时θA=θf,ψA=ψθf(iA),磁链比较器输出脉冲。同样,在B相转到基准位置时,输出位置脉冲。两个脉冲之间,转子转过的机械角度为电机的步进角[5]。

图3 位置脉冲信号测速原理
编译脉冲信号,可计算出转子位置角和速度。
(6)
式中: Δθ——电机步进角;
ΔT——两个脉冲的时间差;
m——开关磁阻电机相数;
Nr——SRM转子极数。
在8/6结构SRM中,步进角为15°。
θt=θf+∫ωdt
(7)
式中:θt——转子位置角;
θf——选取的基准角度[6]。
参考磁链法计算转子位置的关键在于正确地比较参考磁链和实时磁链的大小[7],因此在电流较小的范围内,电流的波动较大,将会导致估算磁链和实际值之间存在较大误差。因此在选取基准磁链特性曲线时,应选取靠近对齐位置的磁链曲线,减小因电流波动频繁而输出无效的脉冲。
2基于神经网络简化磁链法
神经网络是智能理论学科的一个重要分支,可以充分地逼近复杂的非线性函数,并且具有自适应学习的能力。这些特点使得神经网络为SRM建模提供了极大的便利[8]。
BP神经网络对于非线性函数有强大的逼近拟合能力,而且结构简单。基本原理是梯度下降法,按误差的负梯度方向修正权值,直到误差达到目标为止[9-10]。BP神经网络学习过程如图4所示。

图4 训练BP网络流程图
在本系统中,选取A相0°~30°的磁链特性曲线作为数据样本(8/6结构SRM的磁化曲线0°~30°与30°~60°是对称的),选定隐层神经元数为9,隐层和输出层的传输函数分别选用tansig函数和purelin函数。设定最大训练次数为500次,训练目标(均方误差)为0.001。
训练过程的误差性能分析如图5所示。从曲线中可知,进过8次训练后已经到达了要求的目标误差0.001,说明训练的收敛速度较快。训练结束后,可以在Simulink环境下生成BP神经网络的模型。
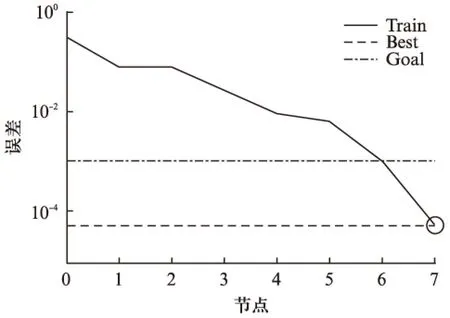
图5 BP神经网络训练结果误差分析
3建模与仿真
基于上述的简化磁链法,搭建了如图6所示的8/6级四相SRM无位置传感器控制系统。该系统外环采用PI速度控制,内环采用直接转矩控制。系统主要由以下几个部分组成: SRM模块,直接转矩控制模块,实时磁链计算模块,参考磁链计算模块,磁链比较器及位置脉冲编译器。

图6 SRM转子位置辨识控制
电机控制环节采用直接转矩控制,将检测的磁链和转矩与参考量比较,结合磁链的幅值和相位,经过开关表判断,给出功率变换器的开关信号。实时磁链计算模块通过电压和电流的积分计算出磁链。参考磁链模块基于神经网络参考磁链计算模型搭建,输入转子电流得到参考磁链值。磁链比较器比较实时磁链与参考磁链,通过编译脉冲信号得到转子位置角和角速度。编译器采用上升沿有效。
在MATLAB/Simulink平台下搭建了SRM转子位置辨识控制系统并进行仿真。仿真具体参数如下: 绕组电压U=220V,额定转速n=1500r/min,功率P=750W,绕组电阻4.2Ω,参考磁链ψf=0.36Wb,参考转矩由PI调节器得到,功率变换器采用不对称半桥结构,仿真步长Ts=1e-6s。
在电机空载的情况下,对控制系统进行仿真。仿真结果如图7~9所示。

图7 磁链比较器输出结果

图8 实际转子位置与估计转子位置比较

图9 转子位置辨识误差
由图7可知,在A点实际磁链与参考磁链相等,则输出一相位置脉冲信息,此时θA=θf。
由图8~图9可知,估计转子位置与实际转子位置之间存在误差,位置误差为100μs,相差的位置角为0.7°。在8/6级四相SRM,齿距角为60°,误差不会影响电机正常运行。
在负载转矩T=0.5N·m时对系统进行仿真。仿真结果如图10~图11所示。
由图10~图11可知,在负载运行情况下,位置误差为300μs,在启动阶段误差略大,但在稳定之后稳定在±1°,误差在不影响电机正常运行的范围内。
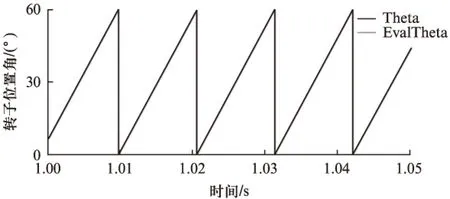
图10 负载情况下位置辨识比较
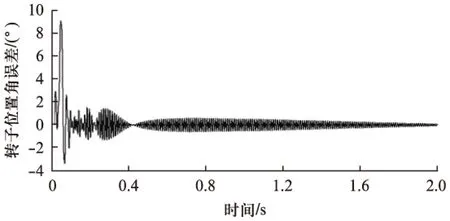
图11 负载情况下位置辨识误差
在空载和负载的情况下对系统进行了仿真,仿真证明了简化链法能够实现对转子位置角的辨识。
4结语
本文简化了磁链电流法,通过比较参考磁链与定子磁链的值输出位置信号脉冲,再对脉冲进行编译得到了转子位置角和转速。应用神经网络离线学习磁链特性曲线得到参考磁链的非线性函数,增加了系统的精度。仿真结果证明了该方法简化了SRM驱动系统的复杂性,增加了系统的可靠性,拓宽了SRM调速系统的应用范围。
【参 考 文 献】
[1]吴建华.开关磁阻电机设计与应用[M].北京: 机械工业出版社,1999.
[2]LOPEZ G G, KJAER P C, MILLER T J E. A new sensorless method for switched reluctance motor drives[J]. IEEE Transaction on IA, 1997,1(4): 832-840.
[3]王旭东,张奕黄,王喜莲,等.无位置传感器开关磁阻电动机位置的检测与预报[J].中国电机工程学报,2000,20(7): 5-8.
[4]王宏华.开关型磁阻电动机调速控制技术[M].北京: 机械工业出版社,1999.
[5]邱亦慧,詹琼华,马志源,等.基于简化磁链法的开关磁阻电机间接位置检测[J].中国电机工程学报,2001,21(10): 59-62.
[6]MA Q Q, LIANG W H, FERREIRA F J T E, et al. Improved flux linkage method for position sensorless control of high-speed SRM// Electrical Machines(ICEM), 2014 International Conference on, 2, Sep, Berlin, Germany 2014: 783-788.
[7]李珍国,李彩红,阚志忠,等.基于改进型简化磁链法的开关磁阻电机无位置传感器速度控制[J].电工技术学报,2011,26(6): 62-66.
[8]夏长亮,王明超,史婷娜,等.基于神经网络的开关磁阻电机无位置传感器控制[J].中国电机工程学报,2005,25(13): 123-128.
[9]王明超.基于RBF神经网络的开关磁阻电机的无位置传感器控制及单神经元PID控制[D].天津: 天津大学,2004.
[10]毛宇阳,开关磁阻电机无位置传感器技术研究[D].南京: 南京航空航天大学,2011.
[期刊荣誉]
中文核心期刊中国科技核心期刊中国学术期刊(光盘版)
全国优秀科技期刊华东优秀科技期刊
中国科学引文数据库来源期刊中国学术期刊综合评价数据库来源期刊
Switched Reluctance Motor Sensorless Speed Control Based on the Improved Simplified Flux Method
MEIBoshan,MENGYueran,GAONing,LIUDongyang
(College of Electrical Engineering, Shanghai University of Electric Power Shanghai 200082, China)
Abstract:In order to improved the application range of the switched reluctance motor drive system, a simplified flux method to identify the rotor position under the condition of direct torque control of switched reluctance motor was presented. By using neural network to fit the nonlinear flux linkage curve, compared with the real time flux linkage. The position signal was estimated by means of the real-time flux linkage compared with the special position flux linkage. In the MATLAB/Simulink environment, the model of the position sensorless switched reluctance motor was built. The simulation results showed that the simplified flux method could simplify the control system and confirm the validity of the presented method.
Key words:switched reluctance motor(SRM); position sensorless control; improved flux method; neural network
收稿日期:2015-09-02
中图分类号:TM 302
文献标志码:A
文章编号:1673-6540(2016)04- 0062- 04
作者简介:梅柏杉(1957—),男,本科,教授,研究方向为特种电机及其控制系统。孟悦然(1991—),女,硕士研究生,研究方向为开关磁阻电机控制系统。
猜你喜欢
现代电力(2022年2期)2022-05-23
装备制造技术(2020年11期)2021-01-26
电子制作(2019年19期)2019-11-23
中国生物医学工程学报(2019年5期)2019-07-16
电子制作(2019年24期)2019-02-23
通信电源技术(2018年3期)2018-06-26
北京航空航天大学学报(2017年12期)2017-04-23
重型机械(2016年1期)2016-03-01
现代计算机(2016年17期)2016-02-28
舰船科学技术(2015年8期)2015-02-27
