
基于MRAS的异步电机飞轮待机模式下转速估计
2016-06-04 05:56梅柏杉刘东洋孟悦然
电机与控制应用 2016年4期
梅柏杉, 刘东洋, 高 宁, 孟悦然, 胡 苏
(上海电力学院 电气工程学院,上海 200090)
基于MRAS的异步电机飞轮待机模式下转速估计
梅柏杉,刘东洋,高宁,孟悦然,胡苏
(上海电力学院 电气工程学院,上海200090)
摘要:提出了一种无速度传感器飞轮储能系统待机模式下转速估计方法。采用现有的转子磁场定向矢量控制策略和模型参考自适应转速观测器,通过输入短时间的激励电流来检测电机转子的转速。仿真结果表明,该方法可以较准确地估算飞轮的转速而不影响飞轮的能量保持。
关键词:飞轮储能系统; 待机模式; 转速估计; 模型参考自适应
0引言
飞轮储能系统的主要特点为响应速度快、能量存储效率高、功率密度高,以及优良的能量循环能力等。在飞轮储能用电机中,异步电机不仅价格便宜、结构简单、性能可靠,更因其在断电待机状态下不存在铁损耗,相对于永磁同步电机具有天然的优势,尤其是在大功率长期储能系统中[1]。存储在飞轮中的能量可用下式表示:
(1)
式中:J——飞轮的转动惯量;
ω——飞轮的角速度。
要估计存储在飞轮中的能量,飞轮的速度信息是必需的,因此,需要在电机中安装速度传感器。但是配上速度传感器势必会增加成本,并且会降低系统的可靠性。鉴于以上缺点,国内外学者提出了诸多无速度传感器的速度估计方法。主要有: 基于模型参考自适应(Model Reference Adaptive System, MRAS)的转速估计方法[2-3]、滑模变结构转速观测器、卡尔曼滤波法[4]、基于神经网络的转速估计器[5]、转子齿谐波法以及高频注入法等。然而这些方法都是在飞轮与电网电源相连时的正常充放电模式下转速估计。
本文提出一种飞轮储能系统在待机模式下的转速估计方法。如果飞轮保持在通电状态下待机,那么速度将由于铁损而逐渐放慢。为了进一步降低功率损耗,在飞轮进入待机模式后,通过禁用所有的门控信号将它与电源转换器断开。当需要飞轮的速度信息时,通过逆变器在感应电机定子侧通一持续时间很短的三相激励电流[6],通过测量定子电压电流可以得到转子的转速信息。为了实现转子磁链和电磁转矩的解耦控制,采用了一种改进的转子磁场定向矢量控制策略。
1系统控制框图
典型的飞轮储能系统如图1所示。飞轮储能系统经一个背靠背的变流器和滤波器与电网相连。网侧变流器通过滤波器与电网相连,主要是对网侧功率因数进行单位化控制,并在一定范围内稳定直流母线电压的输出幅值。机侧变流器直接与飞轮电机相连,主要负责控制电机的变频调速。两个变流器通过直流母线相连,直流母线的电压通常由网侧变流器调节。在充电模式时,当直流母线电压高于设定值时能量通过双向变流器由电网流向飞轮。在放电模式时,能量从飞轮流向电网,直流母线电压开始下降,飞轮通过调节直流母线电压向直流母线提供能量。可以根据不同情况,分别采取合理有效的控制策略。本文主要讨论机侧变流器的控制。
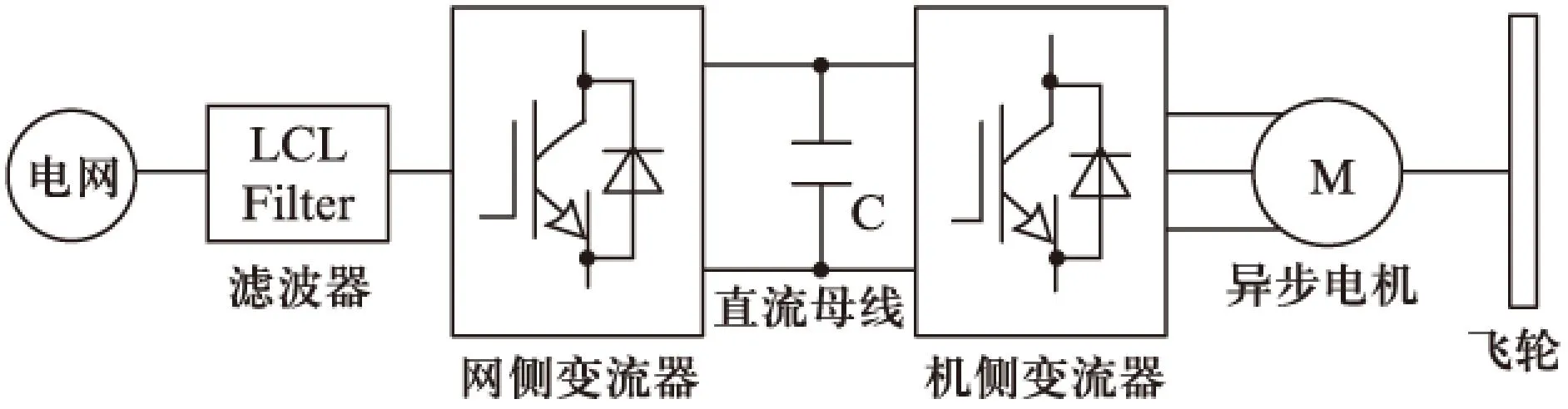
图1 飞轮储能系统基本框图
转子磁场定向矢量控制(Field Oriented Control, FOC)可以实现转矩和磁链的分别控制。在充电/放电模式下,励磁电流和转矩电流在正常的FOC模式下独立控制。在待机模式下,飞轮电机处于断电状态。为了得到飞轮电机待机模式下的转速,使用一个门控信号去实现正常模式与待机模式之间的切换。当需要电机的转速信息时,通过控制门控开关在电机定子侧加入一个持续时间很短的三相正弦激励电流来估计转子转速。在矢量控制下,为了不产生电磁转矩以免对储能系统有影响,电流的转矩分量被设为0。该模式下的控制原理如图2所示。
2转子磁场定向矢量控制原理
如果令d轴与转子磁场方向重合,则转子磁链q轴分量为零(ψrq=0)。由异步电机电机旋转坐标系下的数学模型可以得转子磁场定向控制矢量方程[8]:
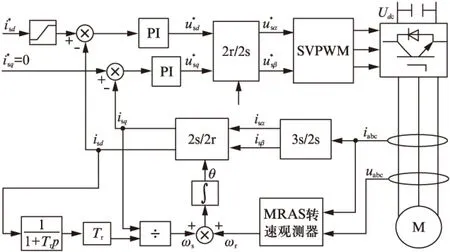
图2 待机模式下转速估计时飞轮电机矢量控制原理图
(2)
(3)
(4)
(5)
(6)
式中:usd、usd——定子电压d、q轴分量;
isd、isq——定子电流d、q轴分量;
ψrd、ψrq——转子磁链d、q轴分量;
Rs、Rr——定子电阻和转子电阻;
Ls、Lr、Lm——定子电感、转子电感和互感;
ωs——转差角速度;
Te——电机转矩;
np——电机极对数;
Tr——转子时间常数;
假设输入到定子侧的激励电流为
(7)
式中:φ0——定子A相电流的初始相位。
三相电流经3/2变化和旋转变换后得:

式中:θ0——d轴相对A相绕组的初始位置角,即转子磁链的初相角。
在间接矢量控制中,转子磁链的方向角由转差频率和转速折算频率相加所得的频率积分求得,即
θ=θ0+∫ω1dt=∫(ωs+ωr)dt
(9)
若磁链的初始相角为0,则加入到定子侧的三相电流的相位角即式(9)中的磁链角θ,励磁电流和转矩电流给定值经过反旋转变化和2/3变换之后,得到三相定子电流的给定值为:
电流给定值的大小要根据转速估计对飞轮储能系统的影响确定。激励电流太大会产生比较大的转矩波动,影响飞轮的能量保持;太小又会影响磁链和转速辨识的准确性。本文中激励电流选择电机额定电流的0.2倍。
矢量控制采用间接矢量控制,加入激励电流之前,先设定励磁电流、转矩电流和转子磁链初相角。设定初相角为零(θ0=0),转子磁链定位在A相绕组中心线上。为减小激励电流对飞轮待机状态下的能量保持,设定转矩电流给定值为零,激励过程中无转矩输出。励磁电流的给定值实际上等于三相定子电流的幅值,其指令遵循斜坡函数,可以保证定子电流平滑上升。
3MRAS转速辨识
MRAS转速观测方法是原理较为简单、应用较为成熟的一种方法。它使用两个单独的磁链模型,一个是不含转速信息的电压模型,另一个是含有转速信息的电流模型。把前者作为参考模型,后者作为可调模型,利用二者输出的磁链偏差,使用自适应收敛算法,得到电机转速的估计值[9]。

图3 模型参考自适应转速观测方法
在两相静止坐标系下,定子电压模型表示的转子磁链模型,即参考模型为:
(11)
以转子电流表示的转子磁链估计模型,即可调模型为:
(12)
以电压模型作为参考模型,电流模型作为可调模型,比较二者得到的转子磁链,取其广义误差:
(13)
根据Popov超稳定性理论,可导出转速自适应算法为:
(14)
通常的MRAS方法都是从电机的零转速开始辨识的,所以控制器的积分项初始值为零。飞轮在待机模式下运行时,虽然加入激励电流的初始时刻时电机的转速是未知的,但是飞轮的惯性比较大,待机时转速不会下降太多,可以根据经验预先设定一个飞轮转速的预估值,作为控制器积分项的初始值。
4仿真结果与分析
根据上述的控制方法,在MATLAB/Simulink平台构建了系统的仿真模型。其中电机参数设置如下: 额定电压UN=380V,额定电流IN=50A,极对数nP=2,额定转速n=1460r/min,定子电阻Rs=0.435Ω,转子电阻Rr=0.816Ω,转子漏电感Lr=0.002H,定子漏电感Ls=0.002H,互感Lm=0.069H,转动惯量J=0.0525kg·m2。
仿真分为3个部分: (1) 0~0.1s。飞轮电机拖动至额定转速后,没有激励电流输入,并有一定的转速下降,用于模拟飞轮的待机模式,且此阶段不需要转速信息。(2) 0.1~0.6s。机侧变流器的门控信号打开,定子侧通过逆变器加入三相激励电流。其d轴和q轴分量如图4(a)、图4(b)所示。检测到的定子电流波形如图5所示。(3) 0.6~0.7s。速度估计完成后,通过选择开关移除激励电流,飞轮再次回到待机模式。
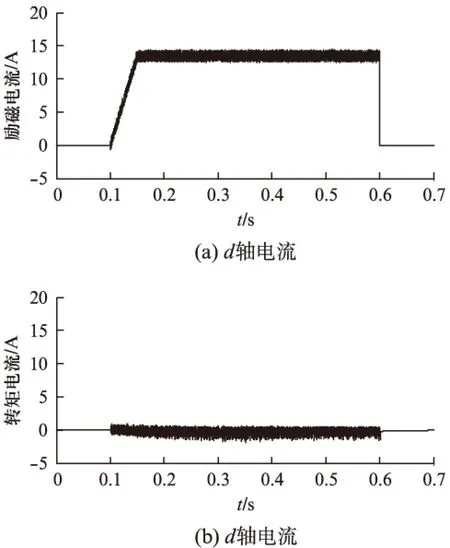
图4 定子电流d、q轴分量
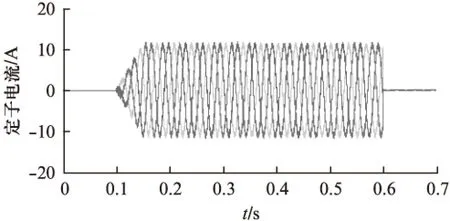
图5 三相定子电流仿真波形
激励电流的大小要根据转速估计对飞轮储能系统的影响确定。激励电流太大会产生比较大的暂态转矩波动,影响飞轮的能量保持;太小又会影响磁链和转速辨识的准确性。本文中激励电流选择电机额定电流的0.2倍。激励过程中电机的转子磁链如图6所示。
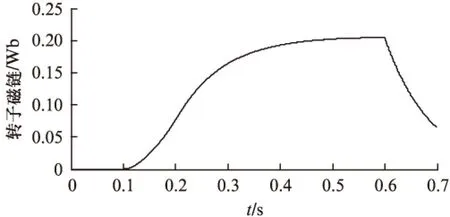
图6 转子磁链波形

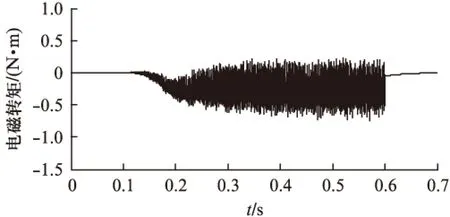
图7 电磁转矩波形
图8为初始估计转速为实际转速的0.9倍时MRAS所估计的转速波形。如果飞轮的转速初始值预估误差比较大,MRAS算法经过一定时间的调节仍会收敛于实际转速。所以为了缩短转速估计所需的时间,就需要其中PI控制器的比例系数KP比较大,而KP过大会使得稳态时MRAS的观测结果具有比较大的波动。因此,实际应用中需反复调试,选择合适的控制参数。

图8 实际转速和估计转速波形
图9为转速估计的局部放大图。仿真波形表明该方法可以较准确的估计飞轮的转速。为了减小所产生的转矩对飞轮转速的影响,应尽可能缩短激励电流持续的时间。但是这个时间必须大于磁链和转速达到稳定所需的调整时间。
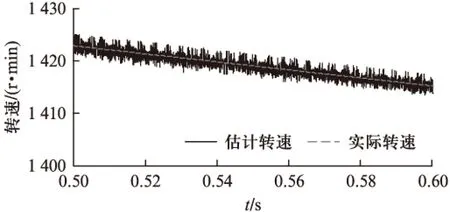
图9 实际转速和估计转速波形局部放大图
5结语
本文研究了一种新的无速度传感器飞轮待机模式下转速估计方法。采用改进的转子磁场定向矢量控制策略和模型参考自适应磁链转速观测器,通过输入短时间的激励电流来探测电机转子的转速。仿真结果证实了该控制策略的可行性和有效性。
【参 考 文 献】
[1]张维煜,朱熀秋.飞轮储能关键技术及其发展现状[J].电工技术学报,2011(7): 141-146.
[2]CIRRINCIONE M, PUCCI M. An MRAS-based sensorless high-performance induction motor drive with a predictive adaptive model[J]. IEEE Transactions on Industrial Electronics, 2005,52(2): 532-551.
[3]缪波涛,孙旭东,刘丛伟,等.一种异步电动机矢量控制的转速辨识方法[J].电工技术学报,2003,18(3): 14-18.
[4]BARUT M, BOGOSYAN S, GOKASAN M. Speed-Sensorless estimation for induction motors using extended kalman filters[J]. IEEE Transactions on Industrial Electronics, 2007,54(1): 272-280.
[5]BA-RAZZOUK A, CHERITI A, OLIVIER G, et al. Field-oriented control of induction motors using neural-network decouplers[J]. IEEE Transactions on Power Electronics, 1997,12(4): 752-763.
[6]徐卫青,窦旺,冯骥.高压变频器失电跨越功能的研究实现[J].电气传动,2014,44(2): 3-6.
[7]BOSE B K.现代电力电子学与交流传动[M].北京: 机械工业出版社,2005.
[8]王成元.现代电机控制技术[M].北京: 机械工业出版社,2008.
[9]王焕钢,徐文立,杨耕.感应电机无速度传感器控制的自适应转速估计[J].电气传动,2002,32(1): 6-9.
[10]张恩睦.基于MRAS的异步电机无速度传感器矢量控制的研究[D].太原: 中北大学,2011.
[期刊简介]
《电机与控制应用》(原《中小型电机》)创刊于1959年,是经国家新闻出版总署批准注册,由上海电器科学研究所(集团)有限公司主办的具有专业权威的电工技术类科技期刊。
期刊定位于电机、控制和应用三大板块,以中小型电机为基础,拓展新型的高效节能和微特电机技术,以新能源技术和智能控制技术引领和提升传统的电机制造技术为方向,以电机系统节能为目标开拓电机相关应用,全面报道国内外的最新技术、产品研发、检测、标准及相关的行业信息。
本刊每月10日出版,国内外公开发行,邮发代号4-199。在半个多世纪的岁月中,该杂志为我国中小型电机行业的技术进步与发展做出了巨大的贡献,在中国电机及其应用领域享有很高的影响。
依托集团公司雄厚的技术实力和广泛的行业资源,《电机与控制应用》正朝着专业化品牌媒体的方向不断开拓创新,在全国科技期刊界拥有广泛的知名度,是“中国学术期刊综合评价数据库来源期刊”、“中国科学引文数据库来源期刊”、“中国学术期刊(光盘版)全文收录期刊”,得到了业内人士的普遍认可,备受广大读者的推崇和信赖,多次被评为中文核心期刊、中国科技核心期刊、全国优秀科技期刊。
MRAS-Based Speed Estimation for an Induction Machine Flywheel in Stand-by Mode
MEIBaishan,LIUDongyang,GAONing,MENGYueran,HUSu
(College of Electrical Engineering, Shanghai University of Electric Power, Shanghai 200090, China)
Abstract:A novel approach for stand-by mode sensorless speed estimation scheme for flywheel energy storage system was presented. With short duration of excitation to the flywheel,the rotor speed was estimated by using existing field orientation control scheme and model reference adaptive system speed observer. The simulation result showed this method could estimate the speed without affecting the energy stored in the flywheel.
Key words:flywheel energy storage system; stand-by mode; speed estimation; model reference adaptive system(MRAS)
收稿日期:2015-09-23
中图分类号:TM 343
文献标志码:A
文章编号:1673-6540(2016)04- 0035- 05
作者简介:梅柏杉(1957—),男,本科,教授,研究方向为特种电机及其控制系统。刘东洋(1989—),男,硕士研究生,研究方向为异步电机控制技术。
