
伪微分反馈控制的电励磁双凸极直流发电系统*
2016-06-04 05:56赵凯弟陈志辉王兰凤
电机与控制应用 2016年4期
赵凯弟, 陈志辉, 王 波, 王兰凤
(1. 南京航空航天大学 多电飞机电气系统重点实验室,江苏 南京 210006;2. 南京晨光集团伺服技术研究所,江苏 南京 210006)
伪微分反馈控制的电励磁双凸极直流发电系统*
赵凯弟1,陈志辉1,王波2,王兰凤1
(1. 南京航空航天大学 多电飞机电气系统重点实验室,江苏 南京210006;2. 南京晨光集团伺服技术研究所,江苏 南京210006)
摘要:传统电励磁双凸极无刷直流发电系统的调压器大多采用PI控制算法。为优化发电系统的建压过程与增强鲁棒性,引入一种新的闭环调压策略——伪微分反馈(PDF)控制。首先对电励磁双凸极电机(WFDSM)发电系统进行了阐述,并且构建了对应的传递函数,继而对采用PI调压器与PDF调压器的发电系统动态性能与抗扰动性能进行了理论分析。基于一台四相电励磁双凸极发电机,在MATLAB/Simulink中搭建了发电系统模型,对两种控制策略进行了仿真对比。采用PDF控制有助于改善发电系统的动态性能,建压响应过程迅速且平稳,超调得到明显抑制;应对负载与转速扰动的抗扰性能好,具备优良的鲁棒性。
关键词:电励磁双凸极直流发电系统; 伪微分反馈控制; 建模; 动态性能; 鲁棒性
0引言
电励磁双凸极电机(Wound-Field Doubly Salient Machine, WFDSM)继承了永磁双凸极电机(Doubly Salient PM Machine, DSPM)结构简单、可靠性高等特点,以励磁绕组代替永磁体,便于调节磁场与快速灭磁[1-2]。伴随着电力电子技术的发展,WFDSM不仅在电力传动领域崭露头角,其与调压器等组成的无刷直流发电系统的优势也日益显著,在航空与车载发电领域的研究和应用已取得众多成果[3-4]。
发电系统常采用的闭环调压方法包括: PI控制、模糊控制、自适应控制等。经典的PI控制简单易行,适用范围广。电压环是发电系统调压的关键环节,输出电压能够快速稳定地跟踪基准,既无超调也无振荡,并且具备较强的抗扰动能力是衡量调压性能的重要指标。然而传统的PI调压器难以满足WFDSM直流发电系统高性能指标的控制要求[5]。因此需寻求更佳的调压方法,提升控制精度,以实现快速、准确、稳定地调压。文献[6]将发电机电压、励磁电流、发电机频率和负载电流四个量作为反馈量,构成多环反馈控制进行调压,提升了发电系统的动态特性,然而其控制环节数量较多,结构复杂,并不适用于无刷直流的WFDSM发电系统;文献[7]针对WFDSM直流发电系统提出了一种非线性PI调压技术,改善了发电系统的稳态精度,然而其增加了相关参数的个数,整定较复杂,且未涉及带载建压过程中超调振荡现象的解决。
康奈尔大学R.M.Phelan教授与西南交通大学陈留教授提出的伪微分反馈(Pseudo Derivative Feedback, PDF)控制理论性能优异,具备快速稳定的响应特性与良好的抗干扰能力。PDF控制已经在工业控制领域取得了一定应用。文献[8-9]阐述了PDF策略在电液伺服系统与风轮机控制中的应用,分析并验证了其出色的鲁棒性;文献[10]针对永磁同步调速系统使用PI调节器的速度环带来的转速超调与振荡问题,设计了PDF控制的速度环,实现了电机转速的无超调与振荡。目前国内研究PDF策略在发电调压领域的文献仍较少。
本文首先介绍了PI控制的WFDSM直流发电系统。在阐述了伪微分反馈理论的基础上,构建了使用PDF调压器的发电系统,并结合传递函数与微分方程进行分析。随后基于有限元软件的仿真结果在MATLAB/Simulink中搭建了发电系统模型,同等条件下对PI调压器与PDF调压器控制的系统进行了比较仿真。结果表明,较之PI调压器,PDF调压器发电系统的输出几乎不存在超调与振荡,抗扰动性能强,展现出更佳的调压特性。
1WFDSM发电系统及开环传递函数
电励磁双凸极电机属于变磁阻电机,常配合整流滤波电路等作为无刷直流发电机使用。其磁链方程如式(1)所示:
[ψ]=[L][I]
(1)
式中: [ψ]——各相电枢绕组与励磁绕组匝链的磁链;
[L]——各相绕组、励磁绕组的自感及彼此之间互感;
[I]——相电流与励磁电流。
其电压方程如式(2)所示:
[u]=[e]-[R][I]=
(2)
式中: [u]——各相电枢绕组与励磁绕组的端电压;
[R]——各相绕组与励磁绕组的内阻。相绕组内阻相对较小,分析时常可忽略。
电励磁双凸极直流发电系统由发电机、整流滤波拓扑、调压控制器、励磁电路、负载等组成。其原理结构如图1所示。励磁绕组两端电压决定了励磁电流的大小,进而决定了发电机磁场的强弱。当电机转速或负载变化时,及时控制励磁电压即可实现稳压输出。励磁电路常见的拓扑形式有: Buck型、不对称半桥型。调压控制器采样检测负载电压、负载电流与励磁电流,经过算法解算后调节励磁电路功率开关管的驱动信号占空比,从而实现对励磁电压的控制。
实际的被控系统是非线性的,在分析中常依据具体问题将对象近似为线性系统。为了分析WFDSM直流发电系统动态与稳态性能,需要构建其开环传递函数。鉴于WFDSM的非线性、多变量、强耦合,为简化分析假设: (1) 电机磁路不饱和;(2) 转子与定子之间的磁链仅通过转子凸极与定子凸极相重叠的气隙进行交链,不考虑漏磁;(3) 定子与转子是良好的导磁体。
WFDSM发电系统的开环传递函数主要包括以下环节: 励磁环节、发电机环节、整流滤波环节。图2给出了系统的开环结构示意框图。

图2WFDSM发电系统开环结构示意框图
图2中,Uf为励磁电压;If为励磁电流;U为整流前发电机的输出电压;Uo为负载输出电压。
忽略励磁绕组自感的变化、整流二极管的压降。根据上文的数学方程,降阶简化后式(3)给出了3个环节的传递函数:
(3)

由式(3)得到WFDSM发电系统的开环系统结构如图3所示。整个系统可以视作由比例环节与一阶惯性环节组成的双惯性系统。

图3WFDSM发电系统开环系统结构图
2PI与PDF控制的WFDSM发电系统性能分析
PI调压器的WFDSM发电系统常采用电压与励磁电流双闭环控制。励磁电流环用于抑制发电机电枢反应引起的输出电压纹波,通常其采样周期远小于电压环,控制环路的带宽较大,故在分析时可假设电流环完全跟踪,励磁电路选取Buck型,简化后的PI控制闭环系统结构如图4所示(忽略扰动)。k4,T3为闭环时励磁环节的传递系数与时间常数。
根据图4所示的系统结构图,可以推导出PI控制时系统闭环传递函数如表达式(4)所示:
(4)
发电系统对应的微分方程如表达式(5):
(5)
观察式(4)、式(5),可以发现: 传递函数的分子部分存在较大的微分项;微分方程等号左侧存在两个关于调节点电压uref的运算项。前向回路中每一种对电压误差Δu的运算,可以视为同时对uo、uref的运算。若前向回路中增加了一项对uref的运算,相当于在微分方程等号左侧增加了一项运算。表达式(5)中等号左侧的两个运算项,表征了输出电压不仅需要跟随uref,还需要跟随duref/dt。当输入uref为阶跃信号时,跟踪duref/dt时将引起较大的电压超调,造成带载建压时的过压危害,同时带来的励磁电流冲击将损害励磁回路中的器件。

图4 PI电压反馈发电系统闭环系统结构图
积分(I)控制用于消除系统静差,提升抗扰动能力,并且可以较好的过滤噪声。因此伪微分反馈控制理论认为: 控制器的前向通路上应该只设置积分运算[11]。微分(D)控制能加快系统的响应速度,增大系统阻尼,减小发散振荡,从而改善系统的动态性能。伪微分反馈控制在反馈回路中对系统输出量R加入了微分计算项,及时预测输出量的变化趋势。反馈回路中R经微分后再积分仍为R,故PDF控制器原理框图如图5所示。其中:u为控制器的输出量。

图5 PDF控制器原理框图
PDF控制器可以视为将PI控制器中的比例环节从前向通路移到反馈通路得到,串联校正改为局部反馈校正。图6为PDF控制器的电压反馈发电系统闭环系统结构。

图6 PDF电压反馈发电系统闭环系统结构图
根据图6所示的系统结构图,可以推导出PDF控制时系统闭环传递函数如表达式(6)所示:
(6)
此时对应的微分方程如表达式(7)所示:
(7)
表达式(8)给出了PDF调压系统输出uo对误差e的传递函数G(s)。
(8)
结合式(6)可得系统的误差传递函数:
(9)
误差e(t)包含瞬态分量ets(t)与稳态分量ess(∞)。当uref为阶跃信号时,根据拉式变换的中值定理可以求出:
(10)
系统的稳态误差为0。由此可知,PDF调压器对于阶跃输入uref可以实现无静差控制。同时由于伪微分环节的加入,系统的响应速度与精度得以保证。
通常认为发电系统的扰动主要包括负载加卸与转速变化。由式(3)可知,发电系统各个环节的传递参数和时间常数,与负载电阻RL与转速n之间存在关联。故分析扰动作用时,应借助系统建模的手段。
3WFDSM发电系统的建模
电励磁双凸极无刷直流发电系统的建模主要包括如下部分: WFDSM本体、整流功率模块、发电调压器等。WFDSM的电感随电机转子位置、励磁电流等的变化而非线性变化,且定转子的凸极结构带来了边缘效应、局部饱和程度不同等问题。使用有限元软件对电机本体仿真,可以较精确地获得WFDSM不同运行状态下的电感特性,有助于建模。
为了检验PDF调压器控制的发电系统的抗扰动能力,并对建压过程进一步分析,基于一台四相8/6极结构的电励磁双凸极电机在Simulink中建立发电系统模型。表1为样机的主要参数。
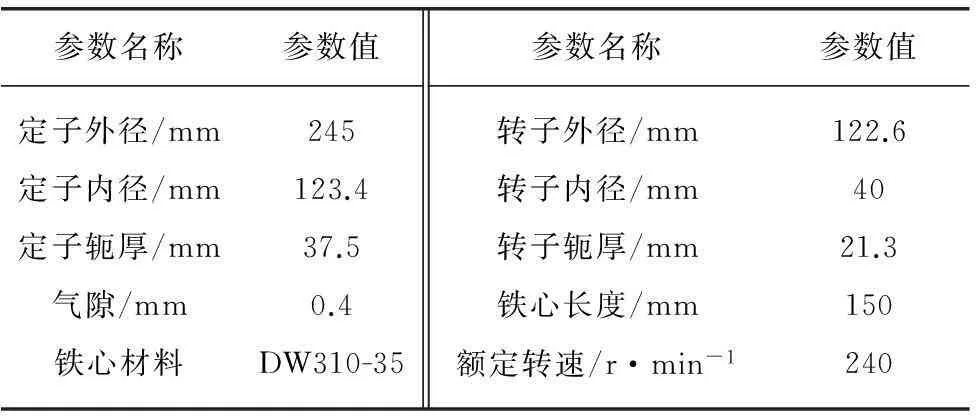
表1 四相WFDSM主要参数
四相WFDSM无刷直流发电系统Simulink模型主要包括电机本体模块GENERATOR、全桥整流模块FBR、调压器模块GCU与负载模块R等部分。
在Simulink中对GENERATOR部分采用分段非线性电感建模。样机转子的极弧系数为 1/3,相绕组的分段电感曲线如图7(a)。不同的励磁电流与电枢电流条件下电感特征值不同,故假设: 双凸极电机的电枢绕组间的互感相对于自感较小,不予考虑;电枢绕组的自感及与励磁绕组间的互感的最小值几乎不随励磁电流和电枢电流的大小而改变,设为恒定值;在固定的励磁电流及电枢电流下,励磁绕组的自感波动较小,取其平均值。一个电周期内可将绕组电感分为A、B、C、D四部分,其中A段采用局部抛物线函数拟合,B、D段等效为线性线段,C段默认为恒定值。在有限元软件Maxwell里建立WFDSM的模型,随后通过仿真获得不同励磁电流和电枢电流下的几个电感特征值Lmin、Lmid和Lmax,最后依据转子位置拟合成连续的电感函数。绕组电感模块如图7(b)。
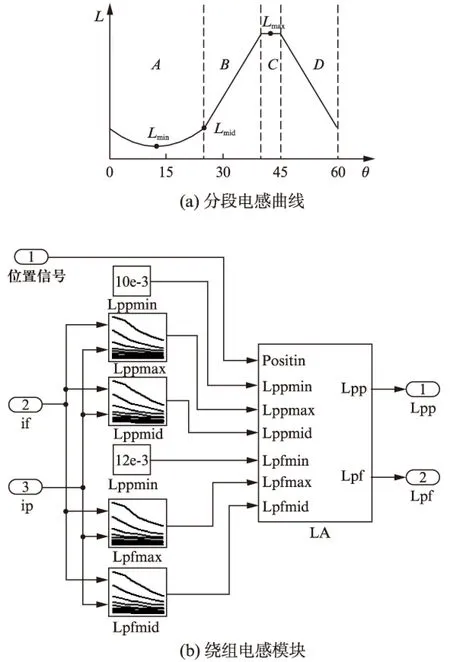
图7 分段电感建模示意图
GCU模块如图8所示,包括Buck型励磁功率电路与控制单元。控制单元可实现PI调压与PDF调压模式的切换,并具备电流限幅等功能。R模块可实现负载加卸。
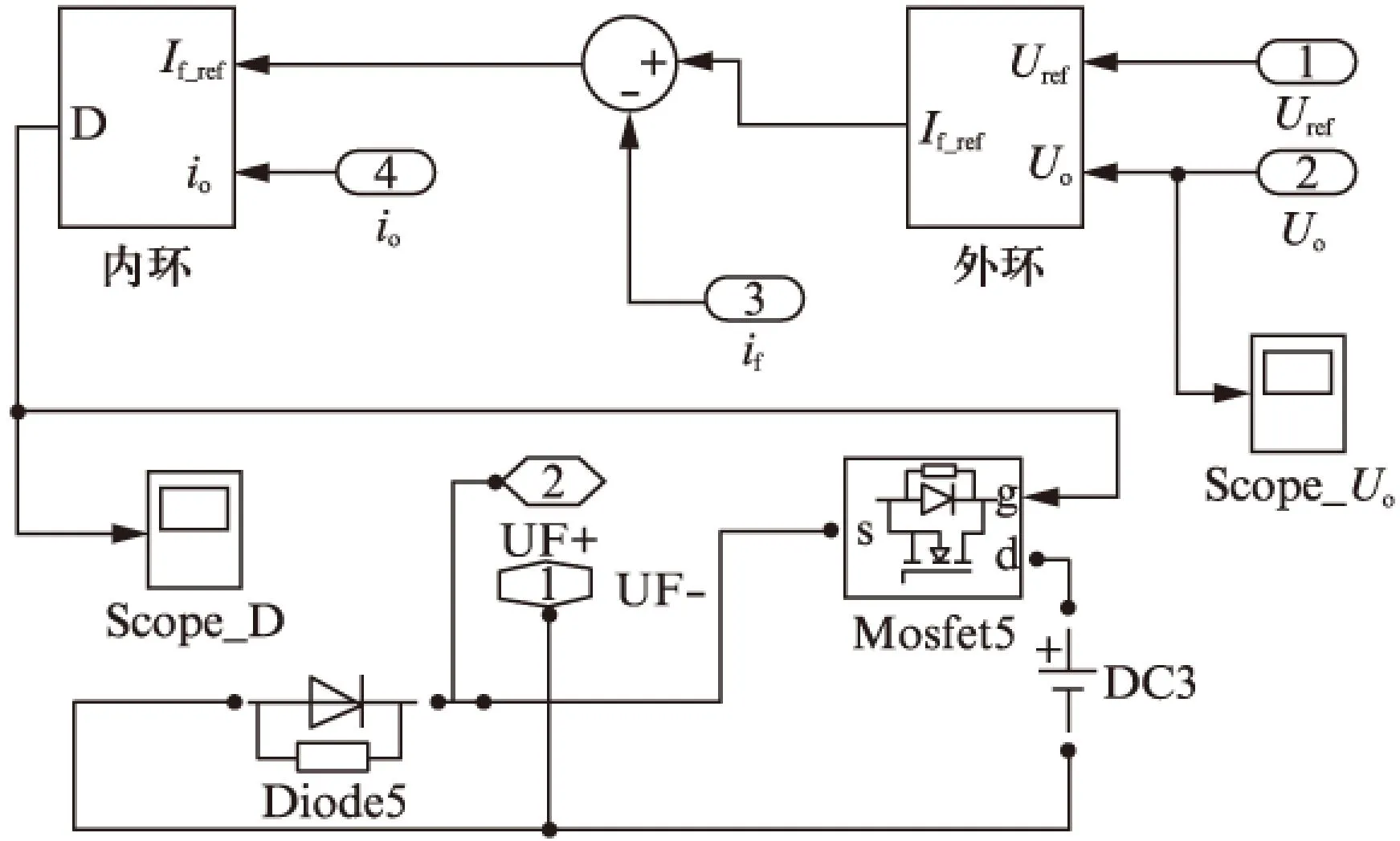
图8 GCU模块
系统建模的准确性将直接影响对控制策略的验证与参数的整定,故将Simulink中发电系统的空载特性、励磁电流8A时外特性与有限元软件Maxwell仿真结果进行对比,如图9所示。
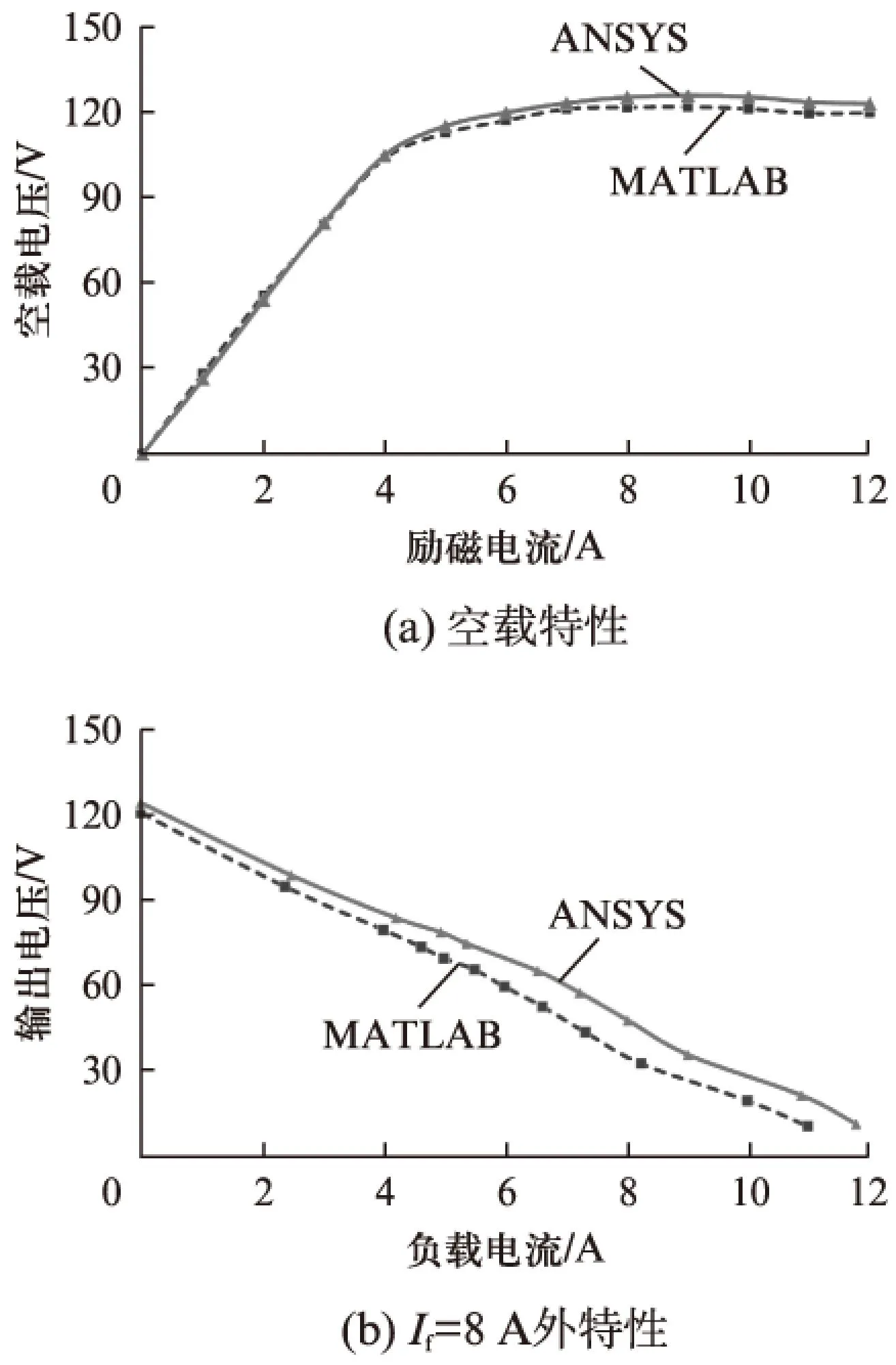
图9 两种建模的仿真对比
根据图9所示,励磁电流大于4A后电机磁场趋于饱和,8A后深度饱和;两条空载特性曲线重合度高,存在最大值约为4V的误差;两条外特性曲线趋势相同,随着负载电流增加存在最大值约为10V的误差。MATLAB仿真与有限元仿真的空载特性、外特性吻合,建模的准确度和可信度较高。故利用Simulink中搭建的发电系统模型仿真,可有效检验控制策略的性能。
4PI与PDF控制的仿真
4.1建压过程
带载建压的仿真设定为: 电机转速n=240r/min,负载电阻Ro=5.6Ω,PI与PDF调压器的控制参数kp、ki相同。表2为调节点电压Uref给定的阶跃变化。

表2 Uref阶跃变化
PI与PDF调压方式下系统输出电压uo和励磁电流If的响应结果如图10所示。
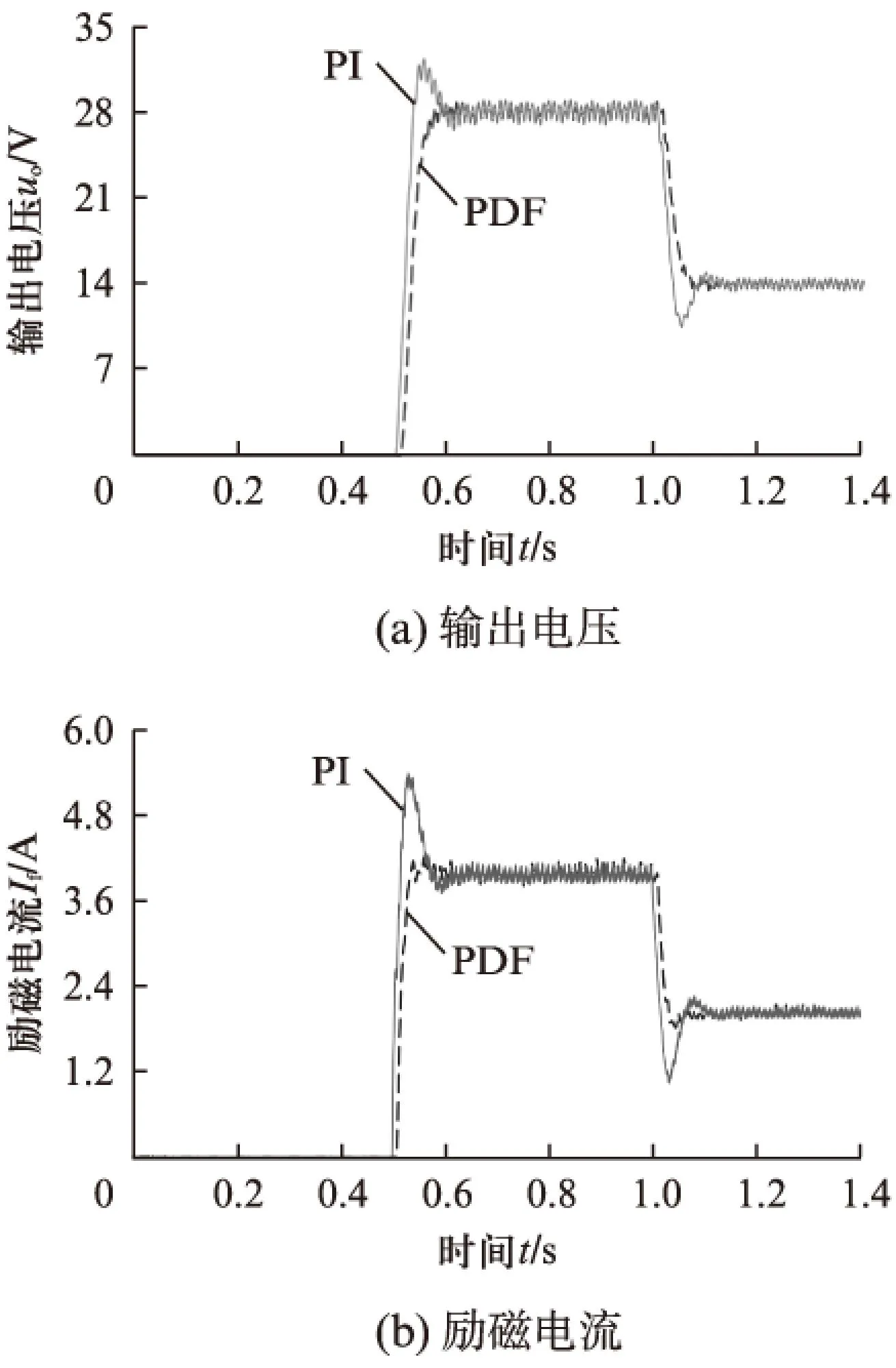
图10 建压过程仿真
由图10可知: (1) PI与PDF调压器都可使输出电压快速准确地跟随阶跃变化的调节点电压,响应时间与超调如表3所示;(2) PI与PDF调压器都可实现对阶跃信号的响应无静差,稳态精度高;(3) 较之PI与PDF调压器控制的发电系统的建压几乎无超调与振荡,过程平稳,且励磁电流的过冲很小。
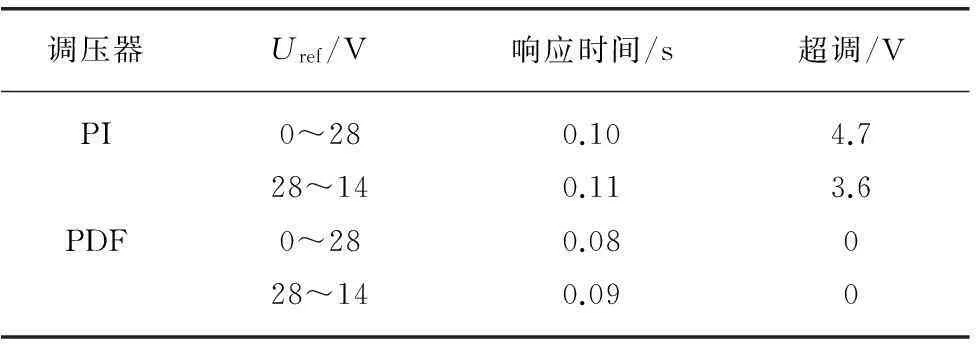
表3 Uo响应时间与超调
4.2扰动作用
扰动作用分为: 负载加卸、转速变化。为有效验证,选取最不利的阶跃信号为扰动输入。
负载加卸扰动的仿真设定为:n=240r/min,Uref=28V,PI与PDF调压器的kp、ki相同。负载电阻Ro的变化如表4所示。

表4 Ro变化
两种调压器的uo与Io波形如图11所示。
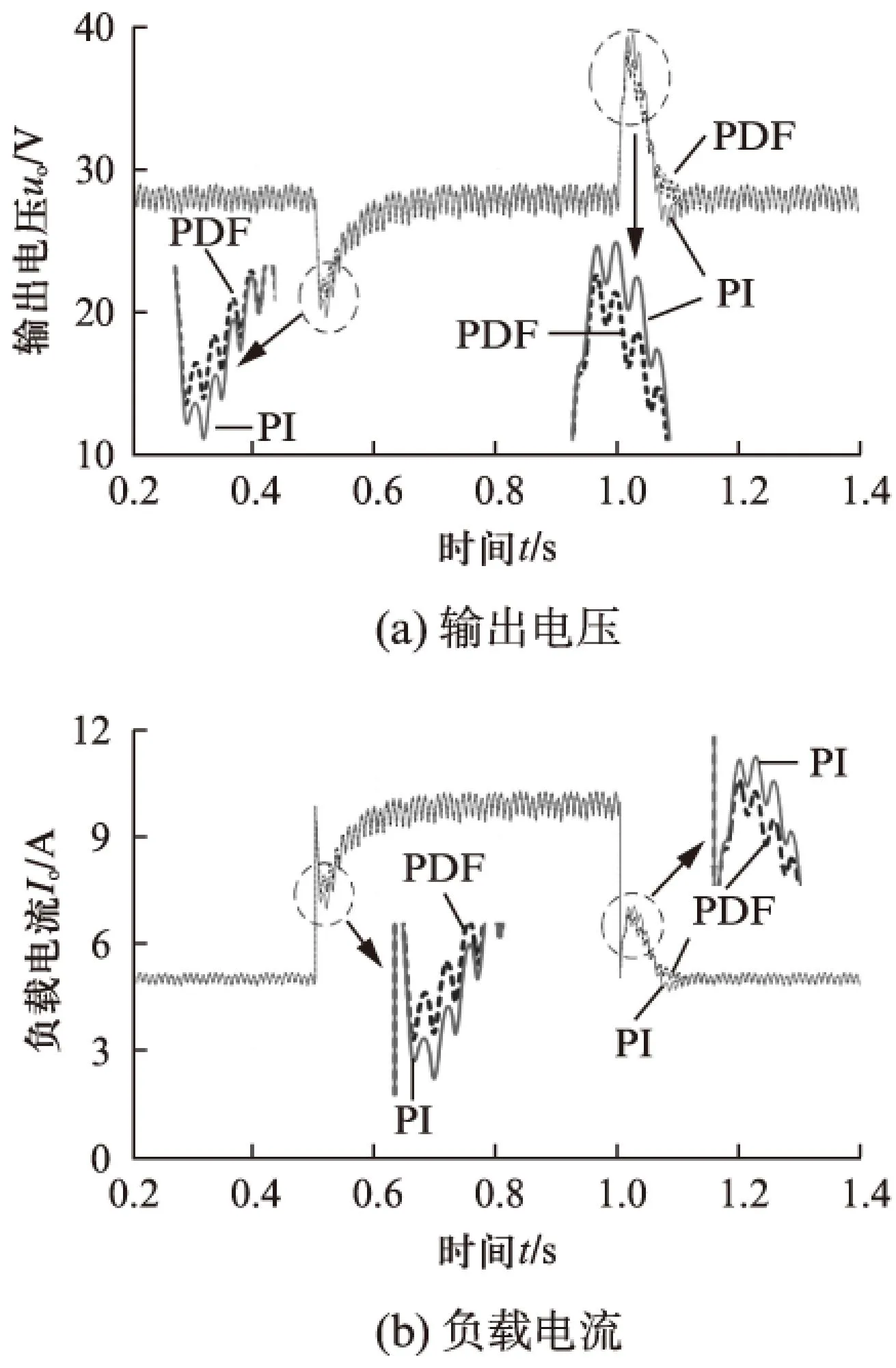
图11 加卸载仿真
Uo波动与恢复时间如表5所示。
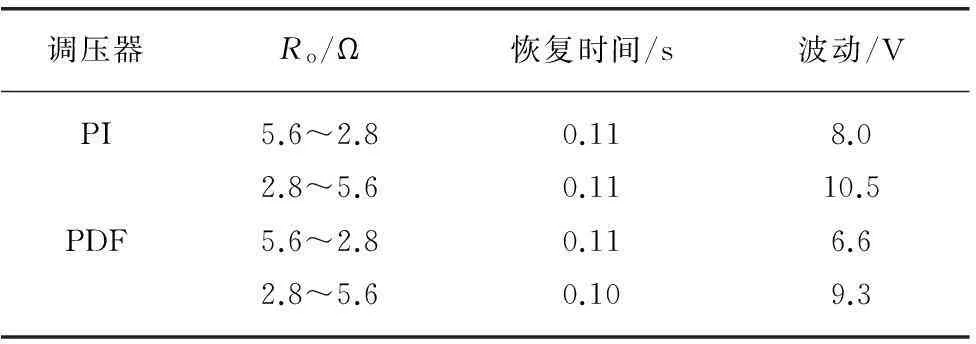
表5 Uo波动与恢复时间
转速变化扰动的仿真设定为:Ro=5.6Ω,Uref=28V,PI与PDF调压器的kp、ki相同。转速n的变化如表6所示。

表6 n变化
两种调压器的uo与Io波形如图12所示。

图12 变转速仿真
Uo波动与恢复时间如表7。
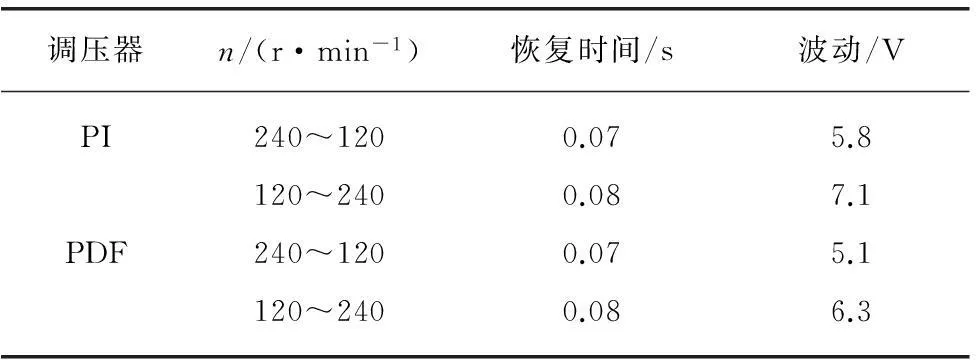
表7 Uo波动与恢复时间
由上述结果可知: (1) PI与PDF调压器均能良好地应对阶跃扰动,恢复时间较快且无静差。(2) 较之PI,PDF调压器的uo波动较小,且恢复过程更平稳。
4.3电机参数变化
发电系统的长期运行带来的温升,会增大励磁电阻Rf,使电机本体参数发生改变。为了验证PDF调压器的鲁棒性,对Rf=1.5Ω(常态)与Rf=2.2Ω(极端温升)两种阻值情况进行相同设定的仿真。uo与Io波形如图13所示。
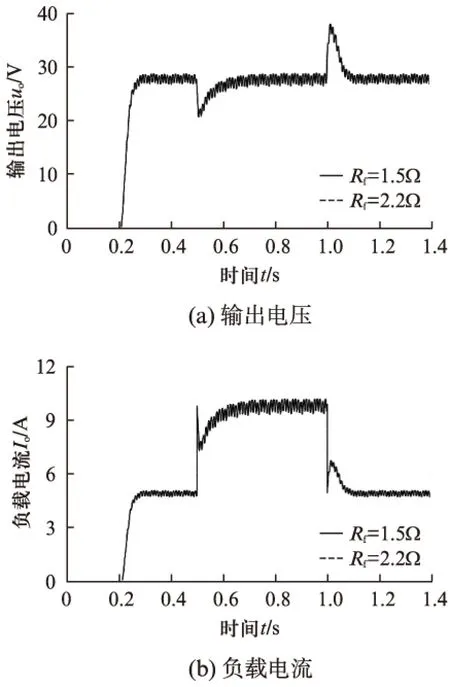
图13 不同Rf的仿真
由图13可知,选用PDF调压器,无论动态与稳态过程,不同励磁电阻时uo或Io的波形基本重合,几乎无差别。故可以认为: PDF调压器对重要系统参数的变化不敏感,鲁棒性好。
5结语
本文针对传统PI调压器控制的电励磁双凸极无刷直流发电系统建压时存在的电压超调与励磁电流过冲的问题,将伪微分反馈控制的理论引入,并且搭建了PI与PDF调压器控制的四相WFDSM发电系统模型。仿真结果证明: PDF调压器有效地提升了发电系统的性能,大大减少了带载建压时的负载过压与励磁电流对励磁回路器件的冲击;应对不同扰动的抗干扰能力较强;系统具备良好的鲁棒性。
【参 考 文 献】
[1]LIAO Y, LIANG F, LIPO T A. A novel permanent magnet motor with doubly salient structure[J]. IEEE Transactions on Industrial and Application, 1995,31(5): 1069-1078.
[2]FAN Y, CHAU K T. Design, modeling, and analysis of a brushless doubly fed doubly salient machine for electric vehicles [J]. IEEE Transactions on Industrial Applications, 2008,44(3): 727-734.
[3]YU L, ZHANG Z R, CHEN Z H, et al. Analysis and verification of the doubly salient brushless DC generator for automobile auxiliary power unit application [J]. IEEE Transactions on Industrial Electronics, 2014,61(12): 6655-6663.
[4]戴卫力.飞机无刷直流起动/发电系统研究[D].南京: 南京航空航天大学,2008.
[5]王莉,孟小利,曹小庆,等.电励磁双凸极发电机的非线性模型[J].中国电机工程学报,2005,25(10): 137-143.
[6]杨善水,张卓然,杨春源,等.基于多环调压控制的混合励磁航空变频交流发电系统[J].电工技术学报,2012,(3): 176-180.
[7]王莉,曹小庆,张卓然,等.电励磁双凸极无刷直流发电机非线性PI调压技术的研究[J].中国电机工程学报,2006,26(5): 153-158.
[8]WANG X Q, TANG M, YING B B. Robustness analysis of PDF control for elect-hydraulic servo system∥2010 2nd International Conference on Mechanical & Electronics Engineering, 2010: 196-200.
[9]LI L Y, REN Y X, JIANG L, et al. Hardware implementation of smooth region switching for wind turbine control using PDF controller∥Renewable Energy Research and Applications (ICRERA), 2013 International Conference on, 2013: 115-120.
[10]王宏佳,杨明,牛里,等.永磁交流伺服系统速度控制器优化设计方法[J].电机与控制学报,2012,16(2): 25-31.
[11]CHEN L, CHENG B, TANG X. Robust behavior of subvariable control of pseudo derivative feedback algorithm∥ASME Paper No.89-WA/DSC-16, 1989.
Wound-Field Doubly Salient DC Generating System of Pseudo Derivative Feedback Control*
ZHAOKaidi1,CHENZhihui1,WANGBo2,WANGLanfeng1
(1. Center for More Electric Aircraft Power System, Nanjing University of Aeronautics & Astronautics,Nanjing 210016, China; 2. Nanjing Chenguang Group Co.Ltd., Nanjing 210016, China)
Abstract:PI control algorithm is the most common algorithm in use for traditional generator control units (GCU) of Wound-Field Doubly Salient Machine(WFDSM) brushless DC Generating System. In order to optimize the transient voltage buildup of the system and promote the robustness, a new close-loop voltage regulation strategy Pseudo Derivative Feedback(PDF) was presented. The WFDSM Generating System was introduced firstly, and its transfer functions are established. Also, dynamic performance and anti-interference capability of GCU with PI control and PDF control are analyzed theoretically. Generating system models were built in MATLAB/Simulink based on a four-phase WFDSM, simulations and comparisons were made between two control strategies. The result demonstrates that dynamic performance of generating system was improved, transient voltage buildup process was fast and smooth, and overshooting was restrained clearly with PDF control. It also shows good anti-interference capability in coping with load and speed disturbance and good robustness.
Key words:wound-field doubly salient DC generating system; pseudo derivative feedback control; modeling; dynamic performance; robustness
收稿日期:2015-09-23
中图分类号:TM 352
文献标志码:A
文章编号:1673-6540(2016)04- 0001- 07
作者简介:赵凯弟(1991—),男,硕士研究生,研究方向为电机及其控制技术。陈志辉(1972—),男,副教授,研究方向为航空电源系统、电机及其控制技术。
*基金项目:南京航空航天大学研究生创新基地(实验室)开放基金(kfjj20150305);中央高校基本科研业务费专项资项资金资助;江苏省产学研联合创新资金-前瞻性联合研究项目(BY2014003-13)
猜你喜欢
大电机技术(2022年3期)2022-08-06
煤气与热力(2021年7期)2021-08-23
河北电力技术(2021年2期)2021-07-29
河北电力技术(2021年2期)2021-07-29
煤气与热力(2021年6期)2021-07-28
煤气与热力(2021年6期)2021-07-28
煤气与热力(2021年4期)2021-06-09
四川电力技术(2020年3期)2020-07-15
煤气与热力(2019年3期)2019-03-18
通信电源技术(2018年10期)2018-11-19
