
基于MATLAB的旋耕机运动仿真分析
2016-06-03 12:01赵华慧李云伍曾庆庆刘得雄
西北农林科技大学学报(自然科学版) 2016年1期
赵华慧,李云伍,曾庆庆, 刘得雄
(1 西南大学 工程技术学院,重庆 400716; 2 重庆富牌农机有限公司,重庆 404100)
基于MATLAB的旋耕机运动仿真分析
赵华慧1,李云伍1,曾庆庆2, 刘得雄1
(1 西南大学 工程技术学院,重庆 400716; 2 重庆富牌农机有限公司,重庆 404100)
[摘要]【目的】 对旋耕机的运动过程进行仿真分析,获得与系统匹配的旋耕机运动参数。【方法】 利用MATLAB分析了旋耕机切土节距、功率消耗与机组前进速度、刀轴转速、耕幅等的关系,并分析旋耕刀的运动轨迹及端点速度。【结果】 根据旋耕机对切土节距以及功率消耗的要求,设计旋耕机的较优运行组合参数为:前进速度vm=0.72 m/s,刀轴转速n=240 r/min,耕幅B=0.8 m。根据设定的参数,由旋耕刀端点的运动轨迹可知其耕深为0.2 m,沟底凸起高度为0.02 m。在设计参数下,旋耕刀端点速度的大小和方向呈周期性变化,证明运动参数的选取是合理的。【结论】 在旋耕机的运动分析过程中使用MATLAB技术,易于得到与系统匹配的运动参数。
[关键词]旋耕机;运动仿真;MATLAB;SIMULINK
旋耕机的设计需要考虑该机型的切土节距、耕深、功率消耗等因素,在传统的旋耕机研制过程中,需对各参数的设定进行手工计算,这是一个十分繁琐的计算过程。当各参数确定以后,若要了解旋耕机的工作情况,就必须制造出样机进行田间试验,以获得相应的信息,然后通过反复修改、试验和完善,直到设定的参数满足运动要求为止。这种传统的设计开发方法,导致研发周期过长、开发成本过高[1-2]。随着计算机技术的发展,在旋耕机设计时对其运动过程进行计算机仿真分析,可以快速找到较优的运动参数,以提升研制效率[3]。
近年来,有许多学者对旋耕机的运动过程进行研究。陈翠英[4]根据旋耕机田间试验数据分析,获得了旋耕机速度参数与功率消耗的关系曲线和经验公式,从而提出了合理选择旋耕机速度参数的方法。夏晓东等[5]对如何加大正转旋耕机的耕深进行了研究。周宏明等[6-7]建立了评价旋耕机总体参数优劣的数学模型,并根据该模型开发了旋耕机总体参数的计算机辅助设计软件。刘永清等[8]建立了潜土逆转旋耕机的功耗模型,并运用遗传算法对所建模型的参数进行了优化,确定了最佳参数组合。但纵观现有研究,目前对旋耕机运动过程进行加工前计算机仿真分析的研究还比较少。为此,本研究利用MATLAB对旋耕机运动过程进行加工前仿真分析,以期获得与系统匹配的运动参数。
1旋耕机运动参数的选取
1.1切土节距
切土节距S是指沿旋耕机前进方向纵垂面内相邻2把旋刀切下的土块厚度,即在同一纵垂面内相邻2把刀相继切土的时间间隔内旋耕机前进的距离[9],也就是土垡的水平纵向厚度,其计算公式为:
S=6 000vm/nz。
(1)
式中:vm为旋耕机前进速度;n为刀轴转速;z为同一切土小区内的刀片数。
根据公式(1),利用MATLAB得出旋耕机的切土节距与机组前进速度和刀轴转速之间的变化曲线如图1所示。
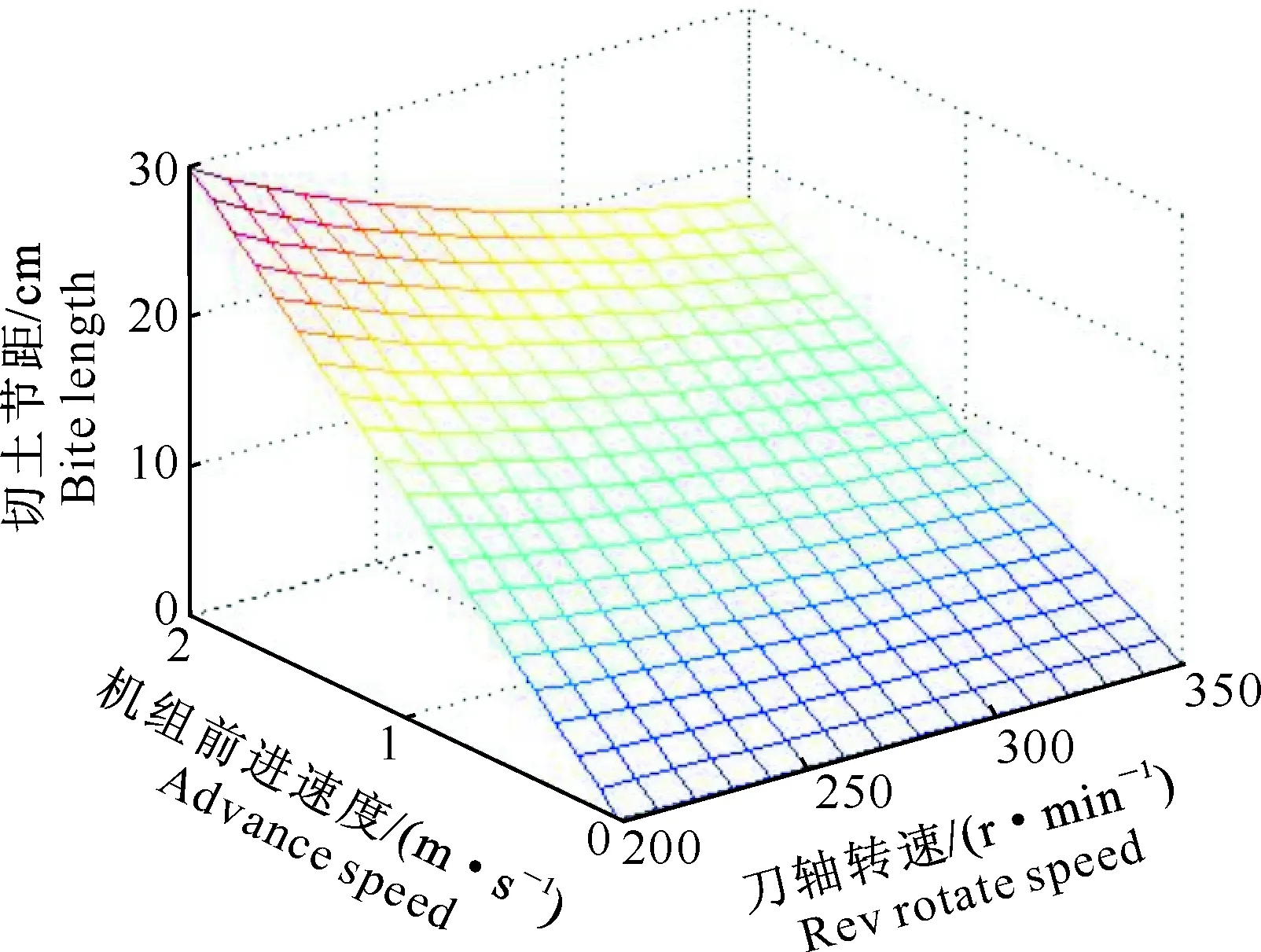
图 1 切土节距与机组前进速度和刀轴转速的关系
1.2旋耕机的功率消耗
为了预测旋耕机整机的功率消耗,国内外学者提出了很多方法,比如单元法、能量法、比功法、比阻法等[10-12]。由于农田的土壤比较复杂,目前为止还没有明确表达旋耕阻力及能耗与土壤动力特性、耕作机具参数之间明晰的、便于应用的关系式[5]。本研究用以下经验公式计算旋耕机的功率消耗:
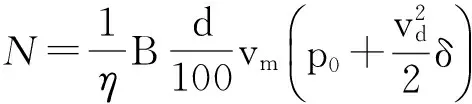
(2)
式中:N为旋耕机的功率消耗;η为旋耕机传动效率,取0.8~0.9;B为耕幅;d为耕深;p0为旋耕切土比阻(N/m2);vd=πRn/30,其中R为旋耕刀端点转动半径;δ为耕前土壤密度(kg/m3)。
根据公式(2),利用MATLAB可以得出旋耕机的功率消耗与机组前进速度和刀轴转速之间的变化曲线如图2所示,此时的耕幅B=0.8 m。

图 2 旋耕机功率消耗与机组前进速度和
同样,可以得到固定机组前进速度vm=1.0 m/s 时,旋耕机的功率消耗与耕幅和刀轴转速之间的变化曲线见图3;固定刀轴转速n=270 r/min时,旋耕机的功率消耗与耕幅和机组前进速度之间的变化曲线见图4。
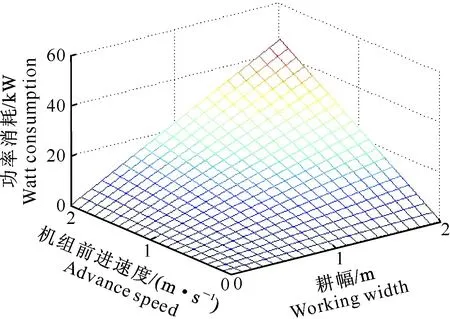
图 4 旋耕机功率消耗与机组前进速度和
1.3旋耕机运动参数的选取
切土节距的大小将直接影响耕作层底部的平整度和碎土质量。由式(1)可知,切土节距的大小与机组前进速度成正比,与刀轴转速和每切削小区内的刀片数成反比。切土节距越小,碎土质量就越好。但机组前进速度过低,会使生产效率降低;刀轴转速过快,会使功率消耗增加;刀片数增多,刀间的空隙变小,容易堵泥缠草。同时,切土节距越小,对蚯蚓的伤害越大,会使蚯蚓对土壤的疏松作用大大降低。因此,切土节距不宜过小。但是切土节距加大时,在耕深不变的情况下耕作层底部的不平度也会加大[6]。因此,在旋耕机的研制过程中,切土节距的选取一般为10 cm左右[13],功率消耗则是在满足设计要求的情况下尽可能小。本研究旨在研制一款适合丘陵山地的小型卧式正旋旋耕机,故由图1~4所示的曲线,选取旋耕机的前进速度vm=0.72 m/s,刀轴转速n=240 r/min,耕幅B=0.8 m,此时旋耕机的切土节距S=9 cm,功率消耗N=7.2 kW。
2旋耕机的运动分析
2.1旋耕刀端点的位移方程
旋耕机作业时,旋耕刀一边随着刀轴的旋转而旋转,一边随着旋耕机的前进而前进,因此旋耕刀的绝对运动是由刀轴的旋转和旋耕机的前进两种运动合成的[14]。对于卧式正旋旋耕机,设坐标原点为刀轴的旋转中心,x轴正向与旋耕机的前进方向一致,y轴正向垂直于地面向上,起始位置第1把刀片端点位于前方水平位置与x轴正向重合,那么旋耕刀端点的运动方程如下所示。
第1把旋耕刀端点运动轨迹方程为:
(3)
式中:R为旋耕刀端点转动半径;ω为刀轴旋转角速度;t为时间;x为第1把旋耕刀端点沿水平方向的位移;y为第1把旋耕刀端点沿竖直方向的位移。
第2把旋耕刀端点运动轨迹方程为:
(4)
式中:Z为同一旋转平面内的刀片数,x1为第2把旋耕刀端点沿水平方向的位移,y1为第2把旋耕刀端点沿竖直方向的位移。
以此类推,得到其他旋耕刀的运动轨迹方程。
2.2旋耕刀端点的速度方程
等式(3)的左右两边分别对时间求导,可以得出旋耕刀端点沿x、y方向的速度随时间的变化关系,即
(5)
式中:vx为旋耕刀端点绝对速度沿x方向的分速度;vy为旋耕刀端点绝对速度沿y方向的分速度。
由此旋耕刀端点绝对速度的大小随时间的变化关系为:

(6)
式中:v为旋耕刀端点的绝对速度。
旋耕刀端点绝对速度的方向用其与x轴的夹角α表示,α随时间的变化关系为:
α=arccos (vx/v)。
(7)
3旋耕机运动的仿真分析
根据式(3)~(7)旋耕机的运动学模型,以及对旋耕机前进速度和刀轴转速的选取,利用MATLAB中的SIMULINK进行仿真,以进一步分析选择参数的合理性。图5所示的是相邻2把旋耕刀端点运动轨迹及其沿x、y轴位移的变化。从图5可以看出,旋耕刀端点的运动轨迹,在设定参数下其耕深为0.2 m,沟底凸起高度为0.02 m,耕深和沟底凸起高度满足设计要求。旋耕机工作时,只有当vx<0,即旋耕刀片端点绝对运动的水平分速度与旋耕机前进方向相反,旋耕刀的运动轨迹为余摆线时,旋耕机才能够正常工作,向后切削土壤。若没有出现vx<0的情况,旋耕机就不能正常工作[15]。

图 5 旋耕刀端点运动轨迹及沿x、y轴位移的变化
图6所示的是旋耕刀端点沿x、y方向分速度vx、vy随时间的变化曲线。图6所示的仿真结果中有vx<0的情况,因此旋耕机能正常工作。
图7所示的是旋耕刀端点速度的大小和方向随时间的变化曲线。从图7仿真结果可以看出,旋耕刀端点绝对速度的大小和方向均呈周期性变化,故旋耕在设定参数下能稳定工作。
由上述结果可以看出,选取的旋耕机的前进速度和刀轴转速是合理的,可以满足其性能要求。

图 6 旋耕刀端点在x、y方向的分速度随时间的变化
4结论
通过MATLAB仿真研究了旋耕机切土节距、功率消耗等与机组前进速度、刀轴转速的关系,同时设定旋耕机参数,对旋耕刀进行了运动学仿真分析,结果表明,在旋耕机的研制过程中,可以通过MATLAB仿真分析旋耕机刀组在工作过程中的运动轨迹、旋耕刀端点速度的变化及耕深、碎土质量等,通过仿真得到适合丘陵山地的小型卧式正旋旋耕机的运动参数组合为:前进速度vm=0.72 m/s,刀轴转速n=240 r/min,耕幅B=0.8 m。该结果表明,在旋耕机的运动分析中,利用MATLAB技术易于得到与系统匹配的运动参数。
[参考文献]
[1]李勇,曾志新,叶茂,等.虚拟样机技术在小型农用装载机设计中的应用 [J].农业工程学报,2004,20(5):134-137.
Li Y,Zeng Z X,Ye M,et al.Application of virtual prototyping technology to development of small-sized agricultural loader [J].Transactions of the Chinese Society of Agricultural Engineering,2004,20(5):134-137.(in Chinese)
[2]苑严伟,张小超,吴才聪,等.农业机械虚拟试验交互控制系统 [J].农业机械学报,2011,42(8):149-153.
Yuan Y W,Zhang X C,Wu C C,et al.Interaction control system of agricultural machinery virtual test [J].Transactions of the CSAM,2011,42(8):149-153.(in Chinese)
[3]冯江,李建民,王德慧.仿真技术在农机设计中的应用 [J].农机化研究,2000(4):96-98.
Feng J,Li J M,Wu D H.Application in agriculture machine design with simulation [J].Agricultural Mechanization Research,2000(4):96-98.(in Chinese)
[4]陈翠英.旋耕机速度参数的合理选择 [J].农业机械学报,1985(2):30-36.
Chen C Y.Reasonable selection of velocity parameters of a rotary tiller [J].Transactions of the CSAM,1985(2):30-36.(in Chinese)
[5]夏晓东,吴崇友,张瑞林,等.加大耕深型正转旋耕机研究设计初探 [J].农业工程学报,1999,15(1):69-72.
Xia X D,Wu C Y,Zhang R L,et al.Research and design for deepening type of clockwise-rotating rotatiller [J].Transactions of the Chinese Society of Agricultural Engineering,1999,15(1):69-72.(in Chinese)
[6]周宏明,薛伟,桑正中.旋耕机总体参数的优化设计模型 [J].农业机械学报,2001,32(5):37-39.
Zhou H M,Xue W, Sang Z Z.Optimized design model for general parameters of a rotary tiller [J].Transactions of the CSAM,2001,32(5):37-39.(in Chinese)
[7]周宏明,郑蓓蓉,薛伟,等.旋耕机总体参数的计算机辅助设计 [J].农业机械学报,2002,33(3):27-29.
Zhou H M,Zheng B R, Xue W,et al.CAD of general parameters of a rotary tiller [J].Transactions of the CSAM,2002,33(3):27-29.(in Chinese)
[8]刘永清,桑中正.潜土逆转旋耕刀数学模型及参数优化 [J].农业工程学报,2000,16(4):88-91.
Liu Y Q,Sang Z Z.Mathematical model of submerged reverse-rotary tiller and parameters optimization [J].Transactions of the Chinese Society of Agricultural Engineering,2009,16(4):88-91.(in Chinese)
[9]李宝筏.农业机械学 [M].北京:中国农业出版社,2003:32.
Li B F.Agricultural mechanics [M].Beijing: China Agricultural Press,2003:32.(in Chinese)
[10]桑正中.农业机械学(上册) [M].北京:机械工业出版社,1988:133-134.
Sang Z Z.Agricultural mechanics (Volume one) [M].Beijing:China Machine Press,1988:133-134.(in Chinese)
[11]李金琦.旋转开沟机 [M].北京:中国农业机械出版社,1984:153-163.
Li J Q.Rotary disk trencher [M].Beijing:China Agricultural Machinery Press,1984:153-163.(in Chinese)
[12]西涅阿科夫Г H.土壤耕作机械的理论与计算 [M].北京:中国农业机械出版社,1981:273-354.
Cnheokob Г H.Theory and calculation of soil cultivation machines [M].Beijing:China Agricultural Machinery Press,1981:273-354.(in Chinese)
[13]中国农业机械化科学研究院.农业机械设计手册(上册) [M].北京:中国农业科学技术出版社,2007:235-238.
China Academy of Agriculture Mechanization.Agricultural machinery design manual (Volume one) [M].Beijing:China Agricultural Scientech Press,2007:235-238.(in Chinese)
[14]北京农业机械化学院.农业机械学 [M].北京:农业出版社,1986.
Beijing Institute of Agricultural Mechanization.Agricultural mechanics [M].Beijing:Agricultural Scientech Press,1986.(in Chinese)
[15]刘保玲.基于高速摄像提取被抛土体运动信息的研究 [D].江苏镇江:江苏大学,2005.
Liu B L.Research on extracting motion information of the thrown clods based on high-speed imaging system [D].Zhenjiang,Jiangsu:Jiangsu University,2005.(in Chinese)
Simulation of rotary tiller based on MATLAB
ZHAO Hua-hui1,LI Yun-wu1,ZENG Qing-qing2,LIU De-xiong1
(1CollegeofEngineeringandTechnology,SouthwesternUniversity,Chongqing400716,China;2FupaiAgriculturalMachineryCo.,Ltd,Chongqing,Chongqing404100,China)
Abstract:【Objective】 This paper obtained matching parameters of rotary tiller by simulation of its movement.【Method】 MATLAB was used to analyze the relationship among advance speed,rev rotate speed and cutting pitch and power consumption of the rotary cultivator.The trajectory and speed of rotary blade were also analyzed.【Result】 According to the requirements of rotary cultivator to cutting pitch and power consumption,the designed operational parameters of rotary tiller were:vm=0.72 m/s,n=240 r/min,and B=0.8 m.The size of depth was 0.2 m and the height of sole was 0.02 m from the movement locus of rotary blade picture with operational parameters.Speed of rotary tillage cutter endpoint velocities from operational parameter verified that the selection of motion parameters were reasonable.【Conclusion】 It was easy to get matching parameters using MATLAB in motion analysis of rotary cultivator.
Key words:rotary cultivator;motion simulation;MATLAB;SIMULINK
[文章编号]1671-9387(2016)01-0230-05
[中图分类号]S222.3;S126
[文献标志码]A
[作者简介]赵华慧(1990-),女,四川盐亭人,在读硕士,主要从事机电一体化研究。E-mail:zhh881007@126.com[通信作者]李云伍(1974-),男,重庆人,副教授,博士后,硕士生导师,主要从事农业机械化研究。E-mail:liywu@swu.edu.cn
[基金项目]国家自然科学基金项目(51475385);重庆市科委应用开发计划项目(cstc2014yykfA80001);中央高校基本业务费专项(XDJK2014C031);重庆市研究生科研创新项目(CYS14061)
[收稿日期]2014-04-25
DOI:网络出版时间:2015-12-0214:2510.13207/j.cnki.jnwafu.2016.01.034
网络出版地址:http://www.cnki.net/kcms/detail/61.1390.S.20151202.1425.068.html
猜你喜欢
农民致富之友(2020年17期)2020-06-19
河北农机(2020年5期)2020-01-11
农民致富之友(2019年12期)2019-05-22
农民致富之友(2017年11期)2017-06-20
汽车科技(2016年6期)2016-12-19
现代农机(2016年4期)2016-09-18
科技视界(2016年17期)2016-07-15
科技视界(2016年10期)2016-04-26
农家顾问(2014年5期)2014-06-26
