基于比例阀控缸的气动机械手柔性定位
2016-05-31 09:29:18王伟伟陈冰冰
东华大学学报(自然科学版) 2016年2期
王伟伟,陈冰冰, 舒 嫚
(东华大学 机械工程学院, 上海 201620)
基于比例阀控缸的气动机械手柔性定位
王伟伟,陈冰冰, 舒嫚
(东华大学 机械工程学院, 上海 201620)
摘要:以气动机械手水平运动气缸的柔性定位为对象,建立基于比例阀控缸的气动伺服系统,推导其数学模型,并运用PID(proportional-integral-differential)控制和自整定模糊PID控制方法,设计其控制器.通过Matlab和LabVIEW的混合编程,建立人机对话界面,同时搭建控制系统的试验平台.通过仿真分析和试验测试,结果表明PID控制和自整定模糊PID控制都能实现柔性定位,但后者具有更高的位置控制精度.
关键词:气动机械手; PID(proportional-integral-differential)控制; 自整定模糊PID控制; 比例阀; 柔性定位
气动机械手因具有结构简单、平稳、无污染、价格低廉、易于维护等特点,越来越多地受到社会的重视,并在冶金、电子、制造和轻工等部门得到广泛应用.但是随着微电子技术和控制技术的发展,对气动机械手运动位置控制方式和精度的要求越来越高,而气动技术本身存在一些难以克服的缺点,难以建立其精确的数学模型,所以采用一般的控制方式,很难实现气动机械手高精度柔性位置控制,对双缸和多缸同步协调控制就更难实现了.本文通过对经典控制和智能控制策略的研究,采用自整定模糊PID(proportional-integral-differential)策略,实现较好的柔性定位.
1试验系统描述
图1为气动机械手的结构图,其中,摆动气缸控制其旋转,中型标准气缸控制其垂直升降,小型标准气缸对升降起辅助作用,薄型标准气缸实现其水平方向的伸缩,气动手指气缸实现对物体的抓取.

图1 气动机械手的结构图Fig.1 Structure of the pneumatic manipulator
本文以气动机械手上的薄型标准气缸位置运动为研究对象,建立基于比例阀控缸的气动位置控制系统,该控制系统工作原理如图2所示.
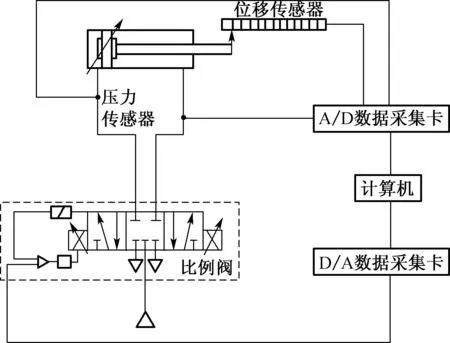
图2 气动位置控制系统图Fig.2 Pneumatic position control system diagram
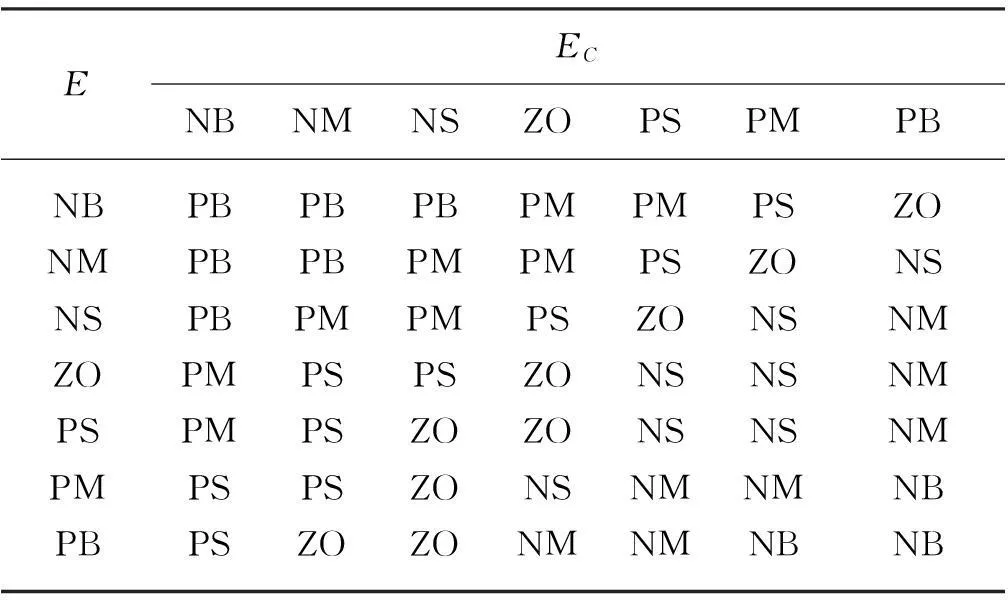
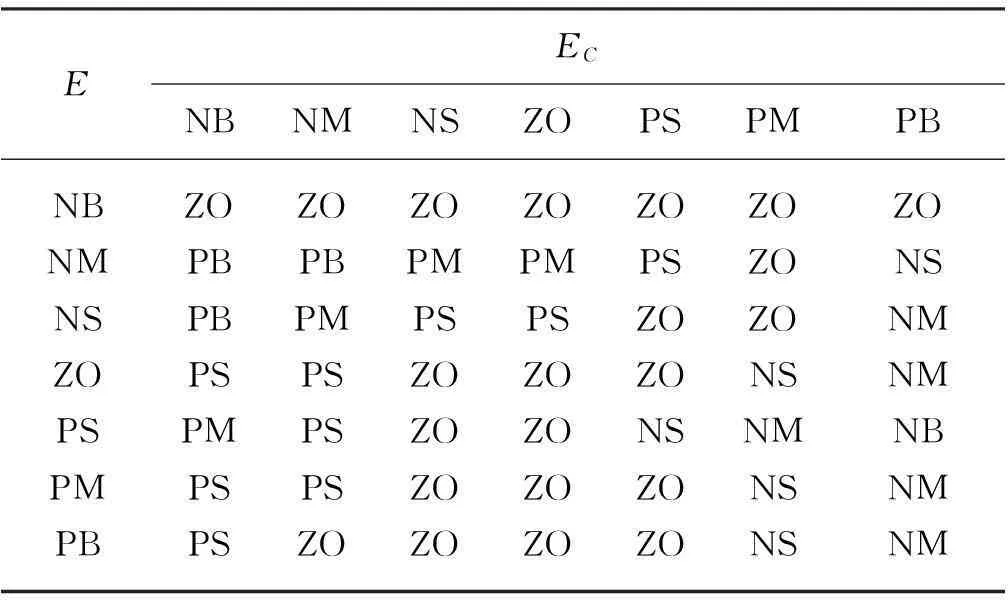
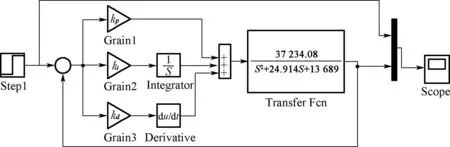
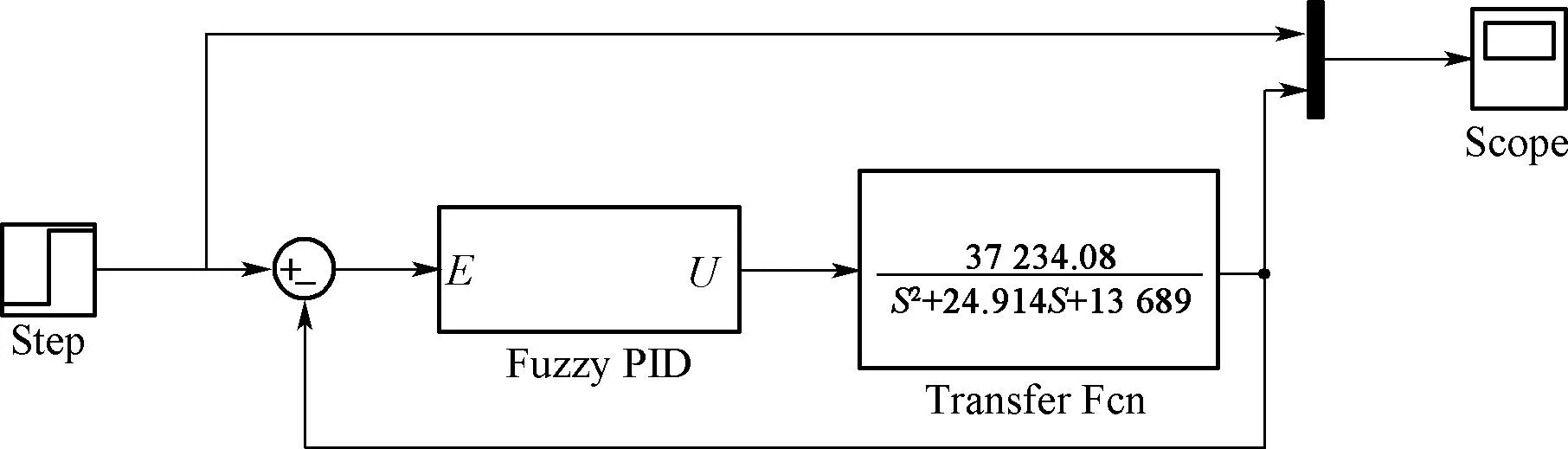
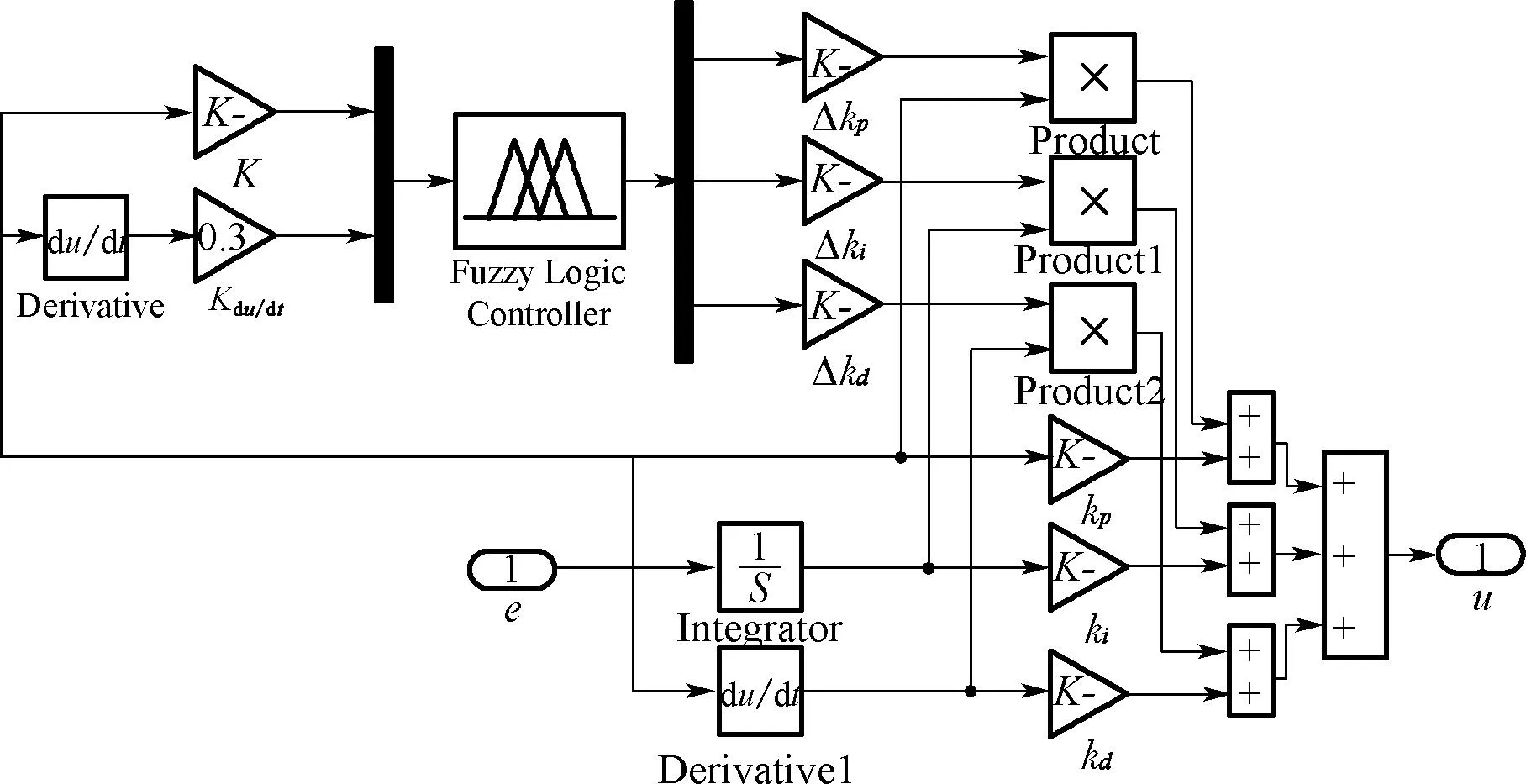
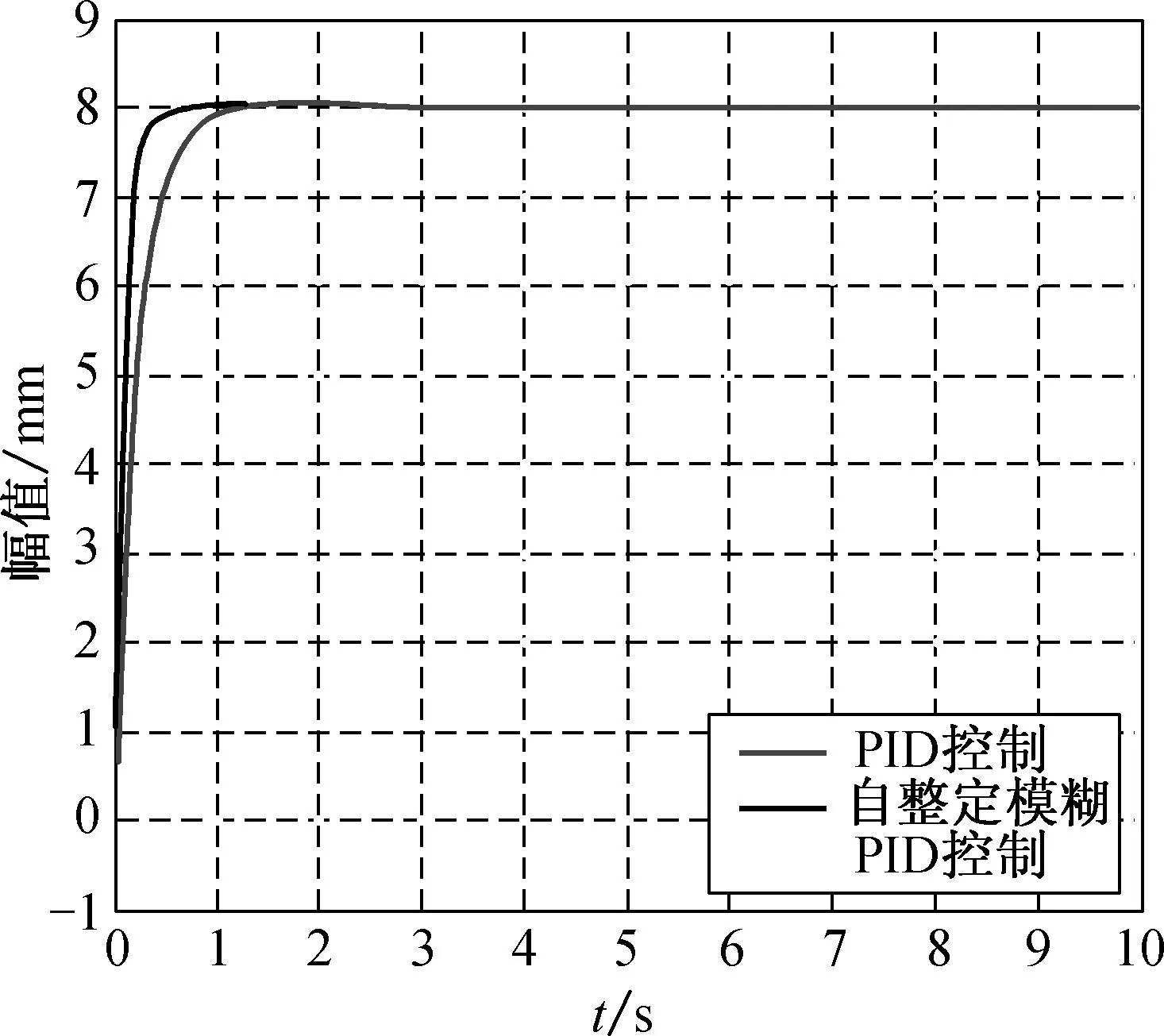
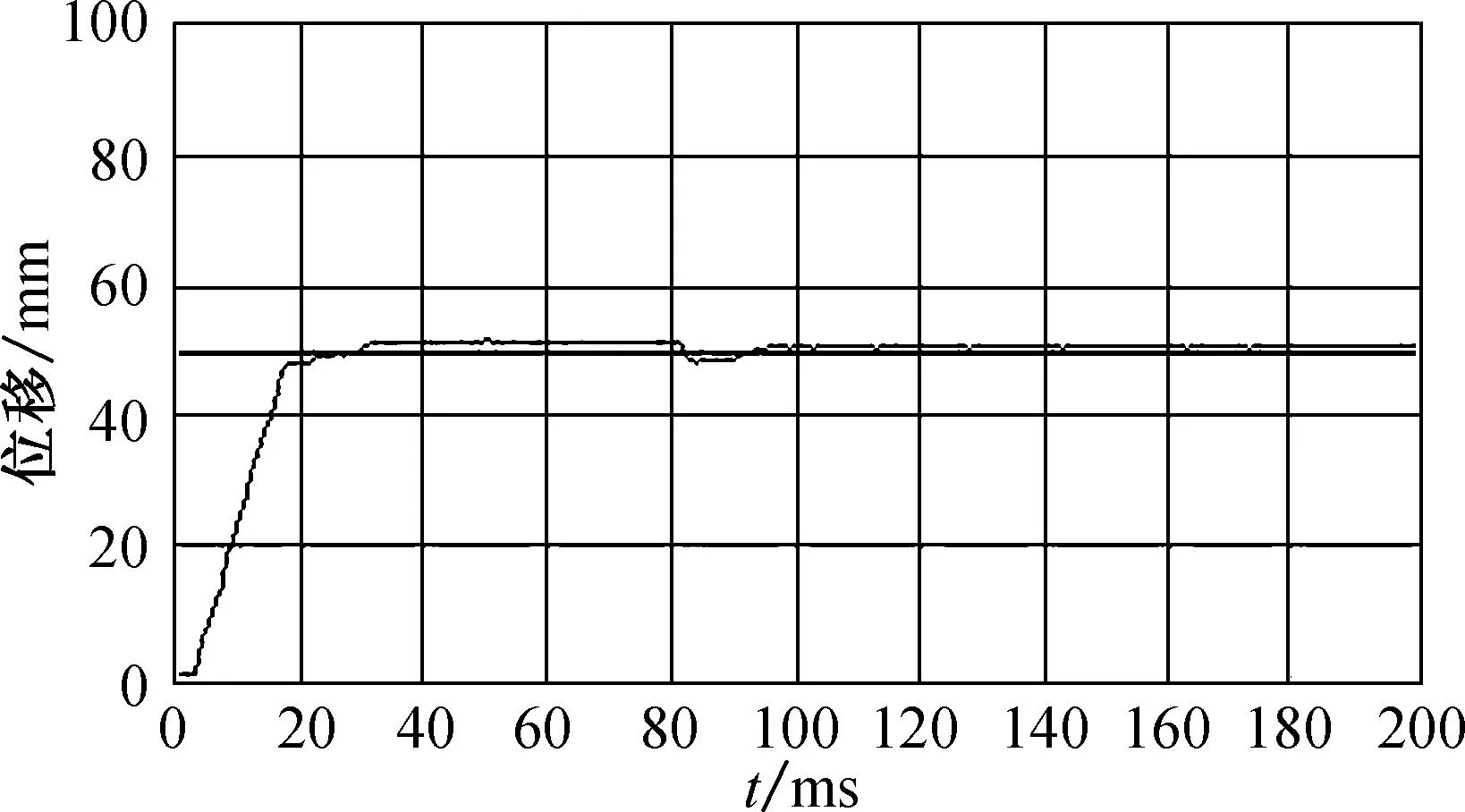
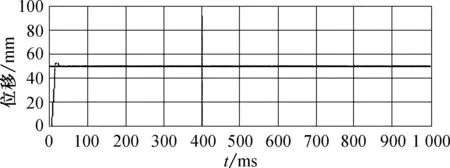
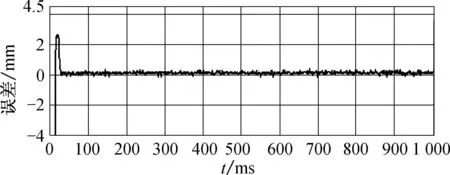
气动位置控制系统主要由6大部分组成:工控机(控制计算机);中泰公司的PCI-8333型数据采集卡;SMC公司的CDQ2A32-75型单活塞双作用薄型气缸;FESTO公司的MPYE-5-1/8-HF-010-B型方向比例阀;Honeywell公司的4000PC型压力传感器;直滑式导电塑料位移传感器.系统工作中,当给定的控制信号U大于传感器反馈信号U1时,比例阀会左端接通,使气缸向右移动,从而使反馈信号变大,通过这种调节逐渐使电压偏差为零;若U 该控制系统在建立数学模型时,做了以下假设[1]:忽略气动控制系统的内泄与外泄;认定系统的工作介质近似为理想气体,具有理想气体的一切特性;气体的内能和动能忽略不计;气动控制系统中的工作介质流动为等熵绝热过程;气源压力和大气压力恒定.通过对系统进行分析,运用自动控制理论、热力学和力学的相关知识,建立了系统的数学模型,得到气动系统传递函数G(S)为 (1) 从式(1)看出该系统为三阶系统.在Matlab中对传递函数稳定性分析时,发现该传递函数有一个极点在原点上,则该系统不稳定.同时气动系统易受到外界因素的干扰,以及气体的可压缩性和活塞与气缸的摩擦不易精确测量等因素的影响,导致建立的数学模型不精确,所以用一般的控制策略难以取得较好的控制效果.本文采用自整定模糊PID控制方法进行控制,不需要精确的数学模型,就可以实现精确的位置控制. 2自整定模糊PID控制器设计 2.1自整定模糊PID控制器原理 图3 自整定模糊PID控制原理图Fig.3 Structure of self-tuning fuzzy PID controller 2.2调节PID参数的模糊规则 由于PID参数与输入控制器的偏差量E和偏差变化率EC之间存在一种非线性关系,这种非线性关系无法用清晰的数学模型来表示,但是可以用模糊语言表示出来,经过数据整理和试验总结,发现参数Δkp,Δki,Δkd与E和EC有如下关系[4-5]. 2.3输入输出量的模糊化及隶属函数的确定 在隶属函数选取中,由于三角形隶属度函数灵敏度高,比较适合于在线调整的自适应模糊控制,所以本系统模糊控制器采用三角形隶属度函数,其编辑可以在Matlab的FIS编辑器里完成. 2.4模糊控制规则的创建 在建立本控制系统的模糊控制规则时选用“IF a AND b THEN c”的形式. 根据自整定模糊PID控制的设计思想可得kp,ki和kd模糊控制规则如表1~3所示[8]. 表1 kp的模糊控制规则表 表2 ki的模糊控制规则表 表3 kd的模糊控制规则表 2.5系统的Matlab/Simulink仿真研究 为了对PID控制器和自整定模糊PID控制器的控制性能进行比较,利用Matlab/Simulink对控制对象进行自整定模糊PID控制仿真和PID 控制仿真,控制对象为式(1). 系统的PID控制仿真模型、自整定模糊PID控制系统仿真模型以及Fuzzy-PID子系统结构[9]如图4~6所示. 图4 PID控制系统仿真模型Fig.4 PID control system simulation model 图5 自整定模糊PID控制仿真模型Fig.5 Self-tuning fuzzy PID control simulation model 图6 Fuzzy-PID子系统结构图Fig.6 Fuzzy-PID subsystem structure 对仿真模型系统输入8 mm的阶跃信号,PID控制和自整定模糊PID控制的仿真响应曲线如图7所示. 从图7可以看出,自整定模糊PID控制比PID控制具有更好的精度、更快的响应速度以及较好的稳定性,是一种性能优异的控制器. 图7 系统仿真结果Fig.7 Simulation results of the system 3试验 LabVIEW软件是一种用图标代替文本而创建程序的编程化语言,在数据采集和控制界面上有很强的功能,而Matlab在数据分析上具有很强大的计算能力和直观的仿真环境.本文试验通过在Matlab中完成控制算法和调用LabVIEW的接口,建立人机对话界面,完成软件系统的开发和试验的在线监控与监测,试验中所用到的阶跃信号条件,幅值为50mm,气源压力为0.6MPa. 试验结果分别如图8和9所示.从试验结果分析可知,当输入阶跃信号时,PID控制的误差为-2~2mm,自整定模糊PID控制的误差为-0.5~0.5mm,并且运用自整定模糊PID控制系统的响应速度得到了很大的改善,稳定性也得到了提高. (a) 响应曲线 (b) 误差曲线 (a) 响应曲线 (b) 误差曲线 4结语 本文研究的基于比例阀控缸的气动位置控制系统,可以实现气动机械手的柔性定位,通过仿真分析和试验测试,得出气动机械手运用自整定模糊PID控制比常规PID控制在柔性定位上有更好的精度,可为进一步研究双缸同步控制和多缸并联控制奠定基础. 参考文献 [1] SMC有限公司.现代实用气动技术[M].北京:机械工业出版社, 1998. [2] 赵广元.Matlab与控制系统仿真实践[M].北京:北京航空航天大学出版社,2012:168-176. [3] 曾光奇,胡均安,王东,等.模糊控制理论与工程应用[M].武汉:华中科技大学出版社,2006:71-81. [4] 查宏民. 基于比例方向阀的气动位置控制系统控制策略的研究[D].天津: 天津大学机械工程学院,2005:29-47. [5] CHEN C L, CHEN P C, CHEN C O. Pneumatic model-following control system using a fuzzy adaptive controller[J].Automatica, 1993,29(4):1101-1105. [6] 韩璞,董泽,王东风,等. 智能控制理论及应用[M]. 北京:中国电力出版社, 2013. [7] 石辛民,郝整清.模糊控制及其Matlab应用[M].西安:西安交通大学出版社,2002:127-218. [8] PARNICHKUN M, NAGECHAROENKUL C. Hybird of fuzzy and PID in kinematics control of a pneumatic system[C]//Proc of the 26th IEEE Int Conf on Industrial Electronics, Control and Instrumentation.Nagoya, 2000:1485-1491. [9] 张德丰.Matlab控制系统设计与仿真[M]. 北京:电子工业出版社,2009. Flexible Positioning of Pneumatic Manipulator Based on Cylinder Controlled by Pneumatic Proportional Valve WANGWei-wei,CHENBing-bing,SHUMan (College of Mechanical Engineering,Donghua University,Shanghai 201620,China) Abstract:Flexible positioning of the pneumatic manipulator horizontal cylinder is chosen as the research object, and the pneumatic servo system is established on the basis of cylinder controlled by proportional valve.The mathematical model is deduced, and the system controller is designed with the methods of PID (proportional-integral-differential) control and self-tuning fuzzy PID control.The man-machine dialogue interface is established and experimental platform of the control system is set up through a combination of Matlab and LabVIEW programming.The simulation and experimental results show that the PID control and self-tuning fuzzy PID control can realize the flexible positioning, but the latter has higher control precision.Key words: pneumatic manipulator; PID (proportional-integral-differential) control; self-tuning fuzzy PID control; proportional valve; flexible positioning 文章编号:1671-0444(2016)02-0248-05 收稿日期:2015-01-19 作者简介:王伟伟(1988—),男,河南信阳人,硕士研究生,研究方向为机电液/气一体化.E-mail:wangweiwei.ajr@163.com 陈冰冰(联系人),男,副教授, E-mail:cbb214@dhu.edu.cn 中图分类号:TP 273 文献标志码:A





猜你喜欢
青少年科技博览(中学版)(2023年5期)2023-06-26 09:39:12
体育科技文献通报(2022年3期)2022-05-23 13:46:54
新高考·高二数学(2022年3期)2022-04-29 05:08:09
中学数学杂志(初中版)(2016年5期)2016-11-01 11:22:43
西南交通大学学报(2016年3期)2016-06-15 20:29:35
电子制作(2016年21期)2016-05-17 03:53:01
通信电源技术(2016年1期)2016-04-16 04:57:29
通信电源技术(2016年5期)2016-03-22 01:09:57
电源技术(2015年11期)2015-08-22 08:50:38
机电信息(2015年3期)2015-02-27 15:54:53