新支线飞机RNAV飞行操作程序的设计与验证①
2016-05-30 10:48:04刘波李建国贝亮
科技创新导报 2016年22期
刘波 李建国 贝亮


DOI:10.16660/j.cnki.1674-098X.2016.22.007
摘 要:区域导航(RNAV)是一种先进的飞行运行方式,具备RNAV能力的民用飞机可以充分发挥机载设备性能,降低飞机对导航台的依赖,减少飞行时间,降低燃油消耗,减小空管负担,增加空域容量,提高航空公司的运行效益。该文结合新支线飞机为满足交付用户运行RNAV的需求,通过对设计RNAV程序和验证RNAV程序进行了概括性的论述,探讨了如何编制质量合格和满足适航运行要求的RNAV飞行操作程序,希望对后续其他大型客机的运行操作程序编制具有借鉴和指导作用。
关键词:区域导航 RNAV 飞行操作程序 程序设计 验证
中图分类号:R95 文献标识码:A 文章编号:1674-098X(2016)08(a)-0007-05
国际民航组织(ICAO)提出了基于性能的导航(PBN)的概念和标准,作为飞行运行和导航技术发展的基本指导准则。PBN将一系列不同的导航技术应用归纳到一起,涵盖了从航路到进近着陆的所有飞行阶段。其目的是为了充分利用现代航空器机载设备和导航系统,提供全球一致的适航要求和运行批准标准。RNAV1和RNAV2是ICAO PBN导航技术应用的一种,一般用于有雷达监视和直接陆空通信联系的航路和终端区飞行。RNAV1和RNAV2对航空器的适航要求是相同的,对运行要求有所区别。
1 RNAV概述
区域导航(RNAV)是一种先进的飞行运行方式,它可以使航空器在导航信号覆盖范围之内,或在机载导航设备的能力限制之内,或二者的组合,沿任意期望的航径飞行[1]。因此它可以充分发挥机载设备性能,减少飞行时间,降低燃油消耗,降低飞机对导航台的依赖,减小空域管理的负担,增加空域容量,提高运行效益。正因为RNAV的这种先进性,使得它对运行条件、机载设备、运行程序和参与运行的人员都有比传统导航方式较高的要求。因此,航空公司实施RNAV运行,必须按照局方的相关咨询通告的要求进行适航和运行评估,以确认自己在设备和人员方面具有实施这一运行的能力,并通过局方审定,获得适航和运行批准,并附相应的运行规范。
根据中国民航《基于性能的导航实施路线图》,我国在中期(2013—2016)实现PBN全面应用,远期(2017—2025)实现PBN与通讯导航监控/空中交通管理的系统整合[2]。根据中期的运行目标分析,新研制的民用飞机必需具备航路RNAV-2或RNP-2,终端区RNAV-1或RNP-1,使用BARO-VNAV的RNP进近能力。
作为我国第一款新研制的涡扇喷气式支线飞机——新支线飞机在TC(型号合格证)取证期间,飞机进行了相关设备及飞机功能的验证,但是还不能满足航空公司进行RNAV运行时的操作程序要求。为满足这一要求,需要根据机型特点,组织相关人员对航空公司的运行要求和飞机系统进行分析,编写RNAV飞行操作程序并进行RNAV试飞验证。
1.1 RNAV和传统导航方式的区别
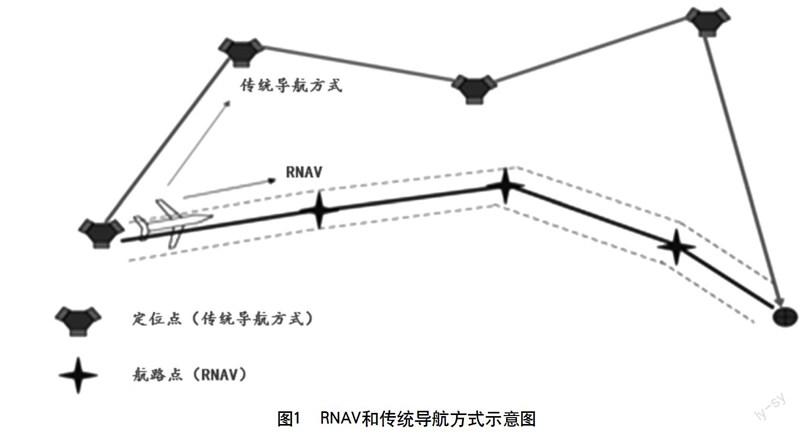
传统的飞行程序都是基于地面导航台站运行,需要逐一飞过导航台。飞行具有如下一些难以克服的缺陷:航段繁多,航线无法最优化;无法实现空间利用最大化;台站维护成本高且无法实现高精度导航。
RNAV飞行操作程序则是操作飞机通过星基导航来进行航迹规划,通过飞越航路点飞行。它完全不受任何地面导航设施的影响,能够有效突破空域限制,及时规避障碍物,可以一种更加灵活而安全的方式进行飞行。RNAV飞行操作程序使用的导航源定位精度一般非常高,而且定位性能基本恒定。因此使用RNAV程序不但可使飞行距离缩短,经济效益明显提升,还可以轻松地实现平行航路的设置,实现有限空域利用的最大化。同时,RNAV飞行航迹更加简洁,可以有效减轻飞行员和管制员的负担。具备RNAV运行能力的飞机将会大大降低飞机对导航台的依赖,将会显著减少地面设施成本。RNAV和传统导航方式示意图如图1所示。
1.2 RNAV飞行操作程序和飞行程序的区别
程序是为达到特定目的而制定的,具有固定顺序的动作和/或决策的逻辑序列。对于民用飞机主制造商来说,具体机型的飞行操作程序就是机组操作飞机最佳实践的组合,是用于向用户提供的标准操作依据。这里需要重点说明一下飞行操作程序设计和飞行程序设计的区别。
飞行机组操作程序设计开发的目的是为机型提供安全、准确、高效和方便的飞行操作说明,为飞行机组在飞机正常、非正常及紧急情况下操作飞机执行飞行任务提供指导。操作程序开发的依据是飞机(尤其是驾驶舱)设计理念,各系统设计原理,相关民航规章要求类似型号机组操作程序,航空事故调查数据,制造商和运营人政策等[3]。该文所提的飞行操作程序正是针对飞机主制造商的飞机机型特点量身定做的操作程序。
而飞行程序设计就是为航空器设定其在终端区内起飞或下降着陆时使用的飞行路线[4],是为机场和导航设施的建设工程提供必需的和工程主要决策依据的航行技术服务,以及为空中交通运输和空中交通管制服务提供法定的飞行和管制必需的技术依据[5]。设计飞行程序的目的是保证航空器在机场区域内按规定程序安全而有秩序地飞行,避免在起飞离场和进近着陆的过程中,航空器与地面障碍物、航空器与航空器之间相撞。
由上述的定义描述可知,飞行操作程序与飞行程序的使用方还是有很大区别的,飞行操作程序主要是提供给航空公司的飞行员使用,飞行程序则是具有通用性,除了可以供飞行员参考外,更主要的是提供给机场以及导航设施建设方,以及空中交通管制方使用和作为技术服务依据。该文所提的RNAV程序设计仅仅是指供飞行员直接操作飞机使用的飞行操作程序。
2 RNAV飞行操作程序的设计
为编制满足新支线飞机特点和航空公司运行要求的RNAV程序,根据《在航路和终端区实施RNAV1和RNAV2的运行指南》中的相关要求,对新支线飞机的RNAV程序初步设计为如下4个部分:第一部分需给出RNAV运行时的最低设备要求;第二部分给出RNAV运行系统精度的检查方法;第三部分给出RNAV运行时机组正常操作程序(飞行前、起飞后、进近准备);第四部分给出RNAV应急程序。
2.1 RNAV对机载设备要求
RNAV有对机载设备的最低要求。RNAV涉及的航电系统包括飞行管理系统(FMS)、全球定位系统(GPS)、测距器(DME)、大气数据系统(ADS)、惯性基准系统(IRS)、显示系统等多方面。
对新支线飞机来说,FMS为RNAV的计算核心。在飞机进行RNAV运行时,必须以FMS作为导航源。FMS接收GPS、DME、ADS、IRS等系统的数据,实时计算位置不确定性估计(EPU)和横向偏差(XTK),在EPU大于规定的 RNAV值时,提供告警信息。GPS导航模式为飞机进行 RNP运行时FMS最主要、最优先选用的导航传感器模式。
RNAV飞行中FMS的导航模式优先顺序为GPS→DME/DME→IRS。RNAV1和RNAV2运行过程中,如果GPS可用,则主用GPS导航模式,如果GPS导航模式失效,FMS可以使用DME/DME/IRS导航模式。在终端区运行时,当GPS、DME均不可用时,FMS会使用IRS导航模式进行位置解算。
电子飞行仪表系统(EFIS)为RNAV运行时的显示部件,将显示RNAV飞行计划、横向偏差、飞行阶段字符、告警等信息。新支线飞机进行RNAV1和RNAV2运行的最小设备清单,详见表1。
2.2 RNAV运行系统精度的检查方法
系统精度检查,通过按压驾驶舱中央操作台上CDU中的PROG按键和NEXT按键,CDU上将显示PROGRESS2/2页面比较EPU值和要求的RNP值。RNAV1要求在95%的飞行时间内,总系统误差不超过1 NM;RNAV2要求在95%的飞行时间内,总系统误差不超过2 NM[1]。对于新支线飞机,当AP接通时,总系统误差等于EPU值;当AP不接通时,飞行员应确定横向偏差指示器上横向偏离刻度和与航路或飞行程序的导航精度要求相匹配。
2.3 RNAV运行时机组操作程序设计
2.3.1 飞行前
获得ATC发布的RNAV程序运行许可。确认导航数据库是当前可用的-在CDU上STATUS页面核实日期有效。确认接收到GPS信号,GPS核实可用。初始化FMS位置,并核对位置信息正确。飞行计划输入RNAV DP程序,并确认DP程序与航图描述的航路以及指定的航路一致。无线电导航调谐模式设定为AUTO模式。VOR/DME USE抑制。PF导航源选择FMS作为导航源。
需要注意的事项:在公布航路上的全部航路点都已加入的前提下,允许根据ATC的许可指令,从数据库中通过插入或删除指定的航路点来修改航路。不允许通过人工输入经纬度坐标或用距离/方位方式输入或创建一个新的航路点。
2.3.2 起飞后
横向导航模式(NAV)选择,自动驾驶仪(AP)按需接通,导航精度检查——按压CDU中的PROG按键和NEXT按键,显示PROGRESS 2/2页面比较EPU值和要求的RNP值。这里需要注意的是:飞行员必须在500 ft以下接通横向导航模式(NAV),建议在条件允许的情况下,尽早接通LNAV。这是新支线飞机的机型特点,必需严格遵守执行。
2.3.3 进近准备
飞行计划输入STAR程序并确认检查,PF一侧的导航源确认为FMS,自动驾驶仪确认接通,横向导航模式(LNAV)确认接通,导航精度检查确认。
2.4 RNAV应急程序
飞行员必须将遇到的任何RNAV能力丢失的情况及时通知ATC,同时报告拟采取的措施。如果不能满足RNAV运行要求,飞行员必须尽快通知ATC。
一旦出现通信失效,机组应按照公布的通信失效程序继续执行RNAV程序。应急程序中应给出关键设备项失效后的操作程序,例如要给出GPS导航精度降级、FMS失效、FD失效等的处置措施。
3 RNAV飞行操作程序的验证
3.1 RNAV试飞验证规划
RNAV飞行机组操作程序是根据AC-91-FS-2008-09中有关RNAV机组操作程序并结合新支线飞机的实际特点编制而成。根据AC-91-24对飞行操作程序的验证要求[6],对编制的RNAV程序进行了如下的试飞验证规划,详见表2。
3.2 RNAV程序验证流程图
RNAV程序验证流程图如下图2所示。
3.3 RNAV运行空域总体要求
在终端区(RNAV1)运行时,要求雷达全程有效覆盖;管制员与飞行员全程通信;有公布的RNAV进场、离场、进近程序;确定和协调该空域的可用性。
在航路(RNAV2)运行时,要求在8 400 m以上;管制员与飞行员全程通信;理论上雷达全程有效覆盖。
3.4 RNAV飞行计划
根据验证规划,共需试飞3架次,分别如下。
第一段从银川河东机场起飞降落至兰州中川机场(RNAV正常程序)。计划从银川机场RW21跑道起飞,降落至兰州机场RW18跑道。共经过5个定位点,375 NM。全程预计1 h左右,整个航路如图3所示。
第二段从兰州中川机场起飞降落至西宁曹家堡机场(RNAV正常程序)。计划从兰州机场RW18跑道起飞,降落至西宁机场RW11跑道。共经过5个定位点,175 NM。全程预计40 min左右,整个航路如图4所示。
第三段从西宁曹家堡机场起飞降落至银川河东机场(模拟导航降级程序)。计划从西宁机场RW11跑道起飞,降落至银川机场RW21跑道。共经过7个定位点,485.5 NM。全程预计1 h20 min左右,整个航路如图5所示。
3.5 执行RNAV真机试飞验证
起飞前按照RNAV飞行机组操作程序的要求进行飞行前准备。
起飞后,执行起飞机场的RNAV1离场程序。
在航路飞行阶段,按照RNAV2飞行过程中需检查确认CDUPROGRESS页面上显示的RNAV/RNP值为2。在RNAV2阶段进行导航模式的模拟降级,按照RNAV应急程序的要求,检查相关告警和导航模式的切换。
进近前按照RNAV飞行机组操作程序的要求进行进近前准备,执行降落机场的RNAV1进场程序,直至截获盲降LOC信号。
3.6 验证评估和结论
新支线飞机于2016年6月从宁夏银川机场起飞,经过银川—兰州、兰州—西宁、西宁—兰州、兰州—银川等4个航段近1 d的飞行验证,顺利完成了RNAV程序验证试飞任务。此次试飞共验证完成了RNAV离场、进近、航路和导航性能降级4项RNAV飞行程序任务。其中根据RNAV试飞要求:RNAV1离场和进场程序执行了两次,RNAV2航路模拟降级程序执行了1次,RNAV2航路正常飞行程序执行了两次。
机组根据上述验证情况,及时填写了程序结论为“通过”的程序验证记录单,同时机组根据验证评述表也给出了RNAV飞行操作程序设计合理的最终评价。至此,标志着设计完成的RVAV飞行操作程序可以加入到飞行机组操作手册中成为正式可交付用户使用的运行操作程序。
4 结语
和执行传统仪表飞行程序的飞机相比,具有区域导航功能并同时提供了RNAV程序的各机型在役飞机,利用先进的RNAV导航方法,可彻底摆脱对地面导航台的束缚和依赖,航空公司也可灵活地设计基于航路点的公司级飞行计划,充分利用航线的空域资源,显著提高航空公司的运行效率,对航空公司的经济效益和安全性贡献明显。该文正是通过开展基于新支线飞机机型特点的RNAV飞行操作程序设计工作并成功组织实施RNAV真机试飞验证工作,不仅证明了新支线飞机具备RNAV运行的能力,也可向用户提供能真正用于实际航线运行使用的RNAV飞行操作程序。
参考文献
[1] 中国民用航空局飞行标准司.AC-91-FS-2008-09在航路和终端区实施RNAV1和RNAV2的运行指南[S].北京:中国民用航空局飞行标准司,2008.
[2] 中国民用航空局.中国民航基于性能的导航实施路线图[Z].2009.
[3] 姚渊.民用飞机飞行操作程序的开发和验证[J].民用飞机设计与研究,2015(3):77-82.
[4] 张凯.浅议飞行程序设计[J].空中交通管理,2006(4):37-38.
[5] 云兰锁.浅议飞行程序设计的标准化管理[J].空中交通管理,1997(4):8-10.
[6] 中国民用航空局飞行标准司.AC-91-24航空器的运行文件[Z].北京:中国民用航空局飞行标准司,2014.
猜你喜欢
计算机教育(2020年5期)2020-07-24 08:52:56
电子制作(2019年9期)2019-05-30 09:42:04
数学学习与研究(2016年22期)2016-12-23 18:10:56
电子技术与软件工程(2016年19期)2016-12-19 18:19:01
新课程·小学(2016年10期)2016-12-12 07:47:58
山东工业技术(2016年15期)2016-12-01 05:31:45
价值工程(2016年30期)2016-11-24 14:19:29
汽车科技(2016年5期)2016-11-14 08:08:15
科技视界(2016年18期)2016-11-03 20:31:07
现代计算机(2016年12期)2016-02-28 18:35:24