
面向对象Petri网的输电网线路保护仿真
2016-05-24 07:47刘俊祎李超群陈俊琰
电力自动化设备 2016年3期
孙 光,刘俊祎 ,李超群,陈俊琰
(1.上海电力设计院有限公司,上海 200025;2.国网江苏省电力公司检修分公司,江苏 苏州 215131)
0 引言
离线整定的保护定值,在系统某些特殊运行方式下,可能会出现选择性或灵敏度不满足要求的情形,需要有效的仿真手段来模拟故障后保护的动作行为。因此,作为调度员培训仿真系统(DTS)建设和定值在线校核系统研发的一部分,研究继电保护仿真模块的建模方法,对评估全网定值性能、校验保护动作逻辑具有重要的实际意义[1-3]。
Petri网(PN)具有直观清晰的图形化表示方法和形式化的数学定义,已被广泛用于保护仿真的研究中[4-9]。文献[4]提出了利用PN分析保护系统性能的思想。文献[5]建立了超高压线路保护的PN模型,并对该模型的动态性能进行评估;文献[6-7]在建模时引入时间PN的概念,更好地展示了继电保护装置动作逻辑的时序过程;文献[8-9]分别提出了带混杂特性的有色时间PN和柔性仿真技术与混杂PN相结合的继电保护仿真建模方法。现有研究丰富了基于PN的继电保护仿真方法,但仍有下述问题需要解决。
a.保护装置与重合闸装置、断路器装置间的配合关系较为复杂。若通过传统PN模型进行建模,则导致模型变得复杂。
b.现有PN模型多专注于描述单个继电保护装置的动态性能,未体现不同保护装置之间的配合关系。简单的PN模型作为无输入/无输出的封闭系统,难以描述保护之间的相互影响行为。
c.保护定值仿真系统中,存在着大量不同原理、不同类型的保护,对模型的可扩展性有一定要求。
本文针对保护仿真特点,提出了基于面向对象Petri网(OOPN)的仿真建模方法。首先,利用面向对象的封装性,将系统划分为多个保护仿真单元(每个保护仿真单元由断路器、断路器上配置的继电保护及重合闸构成);其次,采用时间决策单元和故障计算单元来处理保护装置之间的时间关系和相互配合关系;最后,通过对一输电网络的线路保护进行仿真,表明了模型的有效性。
1 基于OOPN的继电保护仿真模型
OOPN模型定义为一个四元组:

其中,Pu={Pu1,Pu2,…,Pun}为保护仿真单元的有限集合,n>0为保护仿真单元的个数,Pui为第i个保护仿真单元的PN模型;Td为时间决策单元,负责处理仿真过程中的时间配合关系并推动仿真进程的前进;Fc为故障计算单元,负责进行系统的故障计算并传递计算结果;R={Rij,i,jϵN}为对象间的消息传递,Rij表示对象i和对象j间的消息传递关系。
保护仿真单元的PN模型为一个十一元组:

其中,IM、OM分别为保护仿真单元PN的输入、输出库所集合,实现仿真单元与外界的信息交互;P为对象内部库所的集合;T为对象内部变迁的集合;Pre与Post为与触发颜色相关的函数,建立了变迁颜色与库所颜色间的对应关系;颜色和色彩指的是对PN中的每类Token进行赋值,用来区分同一系统中的不同个体[13];C为与变迁和库所关联的色彩集合;M0为保护仿真单元的初始标识;E=[e1,e2,…,en]T为受控变迁对应的外部事件向量,用于描述仿真时用户预设的保护拒动行为以及断路器的拒动、误动行为,如果事件 i为真,则 ei为 1,反之为 0;ST= [st1,st2,…,stn]T为约束变迁的约束条件集合,用于描述保护的动作判据,约束变迁对输入信息进行计算处理,如果约束条件sti满足条件,则变迁可激发;p*为一个指针类,用于控制对象之间的信息传递及各Pu的同步推进,其是一个三元组〈t_next,bConnTd,bNeedFc〉,其中t_next记录Pu的后续将要触发的变迁集,当t_next为TRUE时,对象内部没有变迁可激发,此时本Pu处于暂时“稳定”状态,bConnTd置为TRUE;本Pu可接收来自时间决策单元Td的消息,当本Pu接收到 Td传来的消息后,bConnTd重置为 FALSE;bNeedFc表示本Pu是否发生了引起系统拓扑变更的事件,如果发生则bNeedFc为TRUE,当本Pu接收到外界传来的消息后,bNeedFc重置为FALSE。
时间决策单元中定义一个时序控制器TC来负责处理时序逻辑关系,TC为一个三元组,TC=〈cltTs,cltEvents,TGlobal〉。其中,cltTs为动态时间序列,保存从各Pu和Fc接收到的时序逻辑信息;cltEvents为时间序列中时间节点的事件集;TGlobal为当前仿真时间。
图1为一个简单电力网络,各段线路配置有三段式接地距离保护和四段零序电流保护(零序Ⅰ、Ⅱ段保护未投入运行)。其中,PuA—PuF为保护仿真单元。

图1 简单输电网络Fig.1 Simple power transmission network
1.1 保护仿真单元Pu的构造
PuA—PuF的PN结构相同,单个的保护仿真单元模型如图2所示,其库所和变迁[10]的描述分别见表 1、2。
下面对保护仿真单元的性能进行分析:假设该仿真单元中只有1套保护装置,且断路器处于合位状态(重合闸投入),此时仿真单元的初始标识M0=[I2,I6,I9](在表示标识向量 M0时,数值为 0 的元素均省略,数值的下标表示元素所对应的库所)。故障发生后,保护进行动作判断,如果保护启动,则t1激发,标识变为[I1,I2,I6,I9];如果保护未启动,则标识不变。t2满足使能条件,其激发后标识变为[I2,I6,I9],表示保护仿真单元向时间决策单元发送了保护启动信息。在未接收到外界消息前,该保护仿真单元处于“稳定”状态。直到保护仿真单元接收到时间决策单元的保护动作信号,t3或t4满足使能条件,其激发后标识变为[I3,I6,I9]或[I4,I6,I9]。如果从初始标识 M0开始激发一个变迁序列产生标识M,则M是从M0可达的。将所有可能达到的标识连接起来,即可构成可达图,如图3所示。
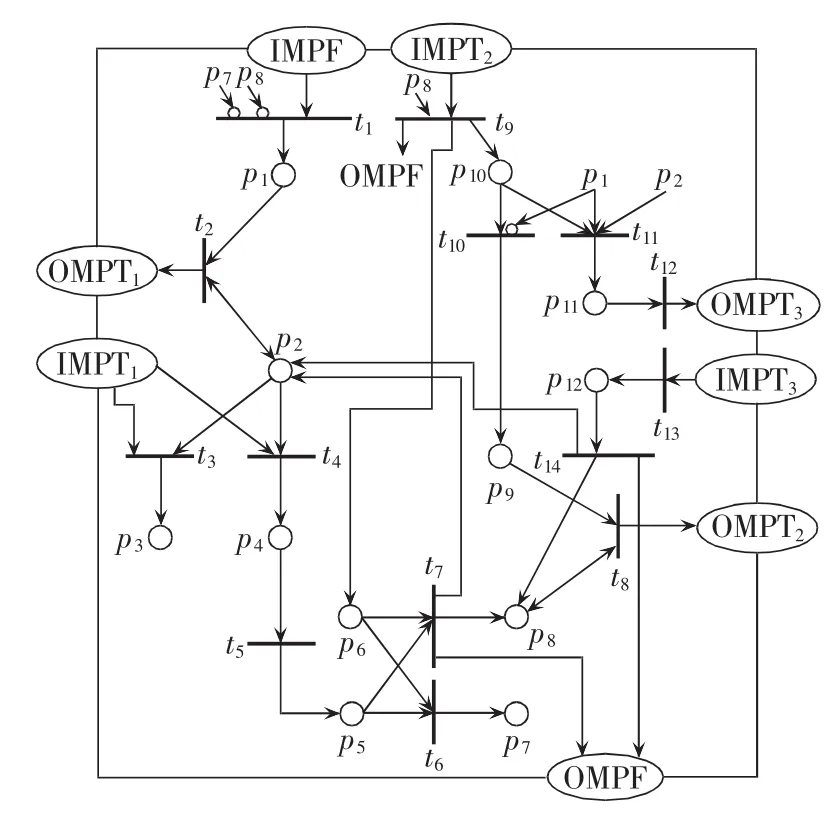
图2 保护仿真单元PN模型Fig.2 PN model of protection simulation unit
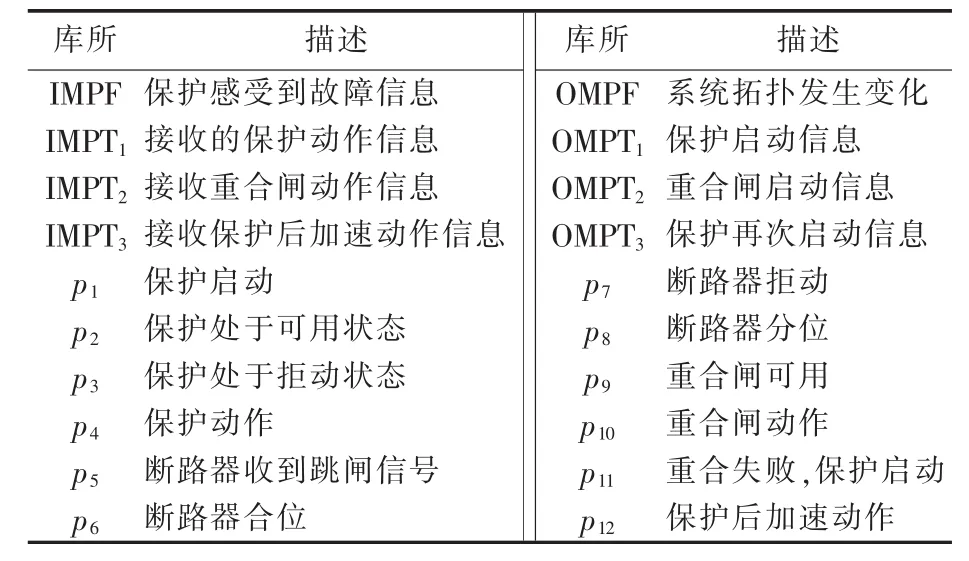
表1 保护仿真单元PN模型的库所描述Table1 Place description of PN model for protection simulation unit
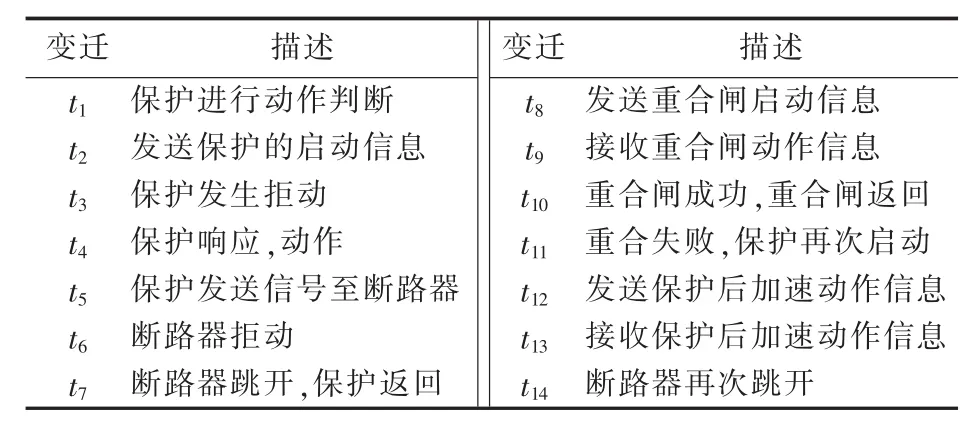
表2 保护仿真单元PN模型的变迁描述Table 2 Transition description of PN model for protection simulation unit
表3中给出了保护仿真单元的变迁激发序列,该序列有2种激发序列可以返回初始标识,分别是{t1,t2}和{t1,t2,t4,t5,t7,t8,t9,t10}。有 3 种激发序列可以到达新的最终标识,分别是{t1,t2,t3}、{t1,t2,t4,t5,t6}和{t1,t2,t4,t5,t7,t8,t9,t11,t12,t13,t14}。
1.2 时间决策单元Td的构造
对于复杂的输电网络,不同保护动作时延不同。延时变迁的局部时钟时限也不同,大量延时变迁的局部时钟在仿真过程中会不停更改状态,使得仿真系统难以正确展示各种时间定值的配合情况。
本文利用保护仿真单元与时间决策单元间的消息传递来模拟保护的延时动作过程,同时由时间决策单元控制推动仿真过程的前进。时间决策单元Td的PN模型如图4所示。其中,库所IMTP1表示从保护仿真单元接收到的保护启动信息,信息用复合色彩表示为<当前仿真时间,保护仿真单元的颜色,<启动保护的颜色1,启动保护的颜色2,…>>;库所p1表示时间决策单元储存的保护启动信息,用复合色表示为<保护仿真单元的颜色,<<启动保护的颜色1,保护应动作时间>,<启动保护的颜色2,保护应动作时间>,…>>;库所p2表示更新后的保护启动信息;库所IMTP2表示从保护仿真单元接收到的重合闸启动和后加速保护启动信息;库所p3表示更新后的所有与时间相关的事件(包括保护、重合闸及故障)信息;库所IMTF表示从保护仿真单元接收到的拓扑变更信息;库所OMTP表示向保护仿真单元发送的动作信息;库所OMTF表示向故障计算单元发送故障计算请求。
时间决策单元Td接收保护的启动信息后,通过变迁t1来实现对保护的启动信息的更新,所有的信息存储在cltTs和cltEvents中,其更新规则如下:
a.如果IMTP1中不含某保护的启动信息,p1含有该保护的启动信息,则该保护处于返回状态,库所p2中删除该保护的应动作信息;
b.如果IMTP1中含有某保护的启动信息,p1中不含有该保护的启动信息,则该保护启动,库所p2中新增保护的应动作信息,其应动作时间为当前仿真时间+动作时延;
c.如果IMTP1中含有某保护的启动信息,p1中也含有该保护的启动信息,则该保护处于时延等待状态,库所p2中有保护的应动作信息,其应动作时间保持与p1中记录的一致。
变迁t2的作用是将重合闸启动信息、后加速保护启动信息与库所p2中信息进行综合,更新cltTs及cltEvents。此时如果IMTF中有Token,则变迁t4激发,进行故障计算,所有保护重新进行动作判断;如果IMTF中无Token,则变迁t3激发,t3的作用是选择出离当前仿真时间TGlobal最近的时间节点,触发其对应的事件,并发送消息至各保护仿真单元或故障计算单元,同时推进TGlobal至对应时间节点。
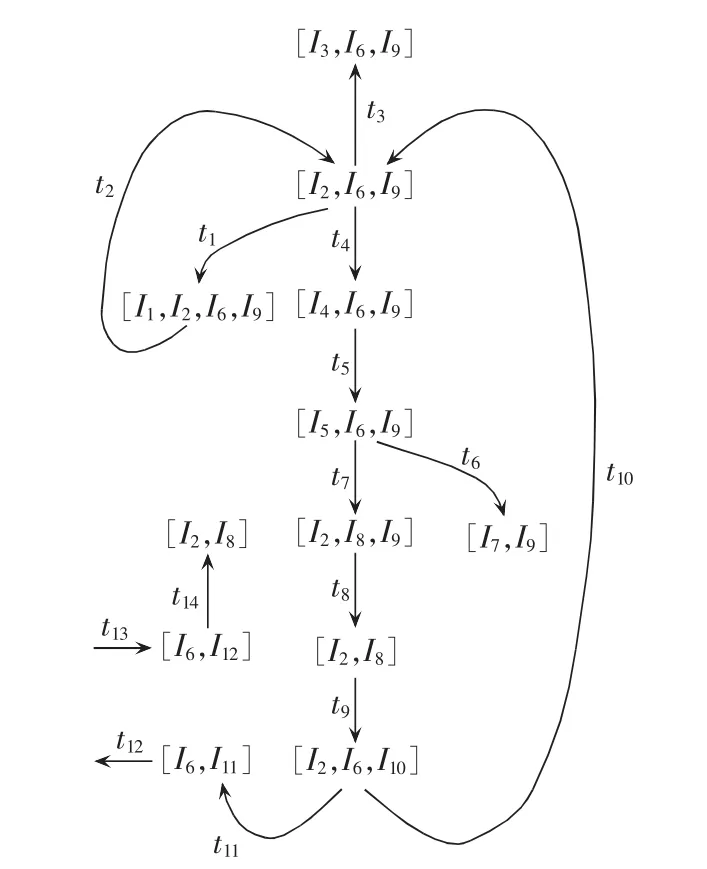
图3 保护仿真单元的可达图Fig.3 Reachability graph of protection simulation unit
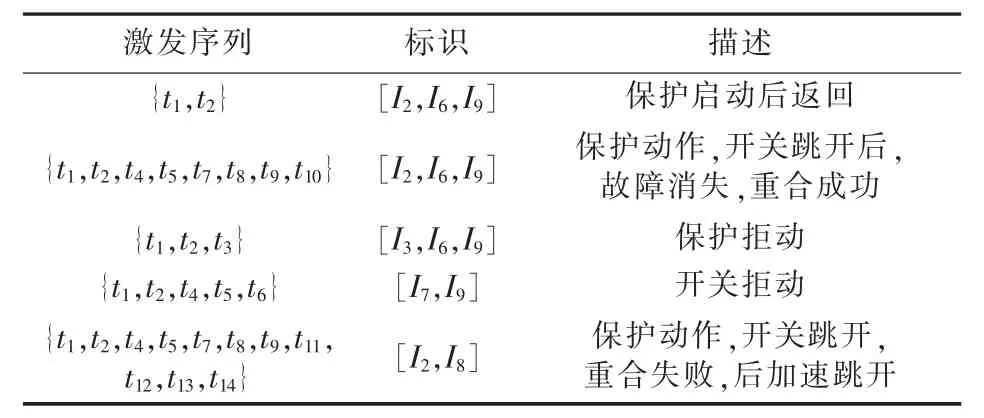
表3 保护仿真单元的激发序列Table 3 Excitation sequence of protection simulation unit
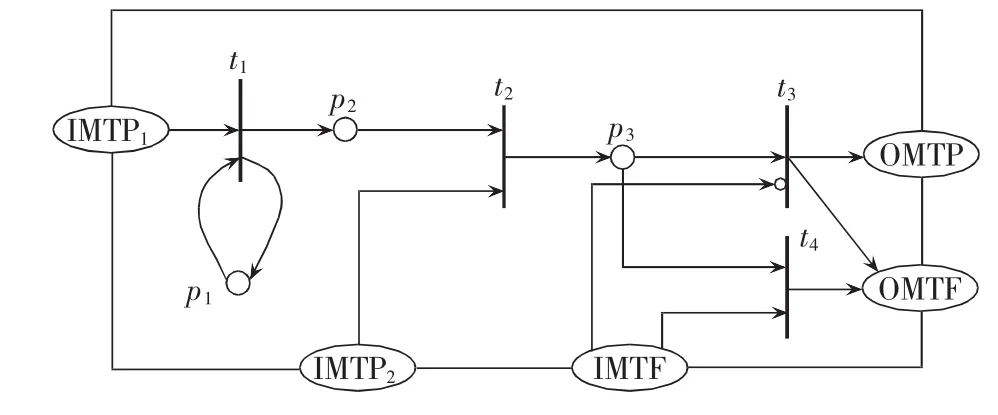
图4 时间决策单元的PN模型Fig.4 PN model of time decision-making unit
1.3 故障计算单元Fc的构造
故障计算单元Fc的PN模型如图5所示。其中,IMFT为从时间决策单元接收到的故障计算请求;变迁t1为特殊的计算变迁,负责进行故障计算,向p1中输出故障计算结果,故障计算结果经变迁t2发送给各个保护仿真单元。
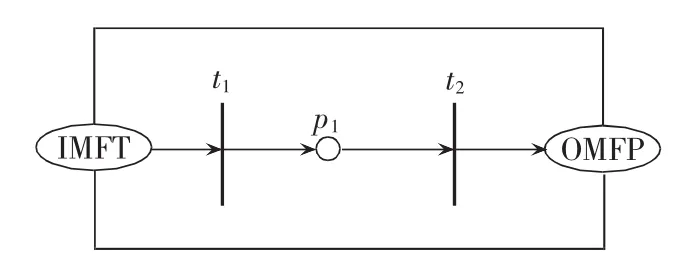
图5 故障计算单元的PN模型Fig.5 PN model of fault calculation unit
1.4 保护仿真系统OOPN模型的信息传递
保护仿真系统OOPN模型中各对象间的消息传递关系如图6所示。当所有保护仿真单元p*的bConnTd为TRUE时,时间决策单元通过门变迁gPT-1、gPT-2接收所有保护仿真单元的保护及重合闸的启动信息,Td进行决策后通过门变迁gTP将结果返回给各保护仿真单元,保护仿真单元中相应的保护或重合闸动作。保护仿真单元中断路器状态的改变引起系统拓扑的变更,此时p*的bNeedFc为TRUE,通过门变迁gPT-3通知Td,则Td的IMTF中含有Token,其变迁t4可激发,产生故障计算信号,并通过门变迁gTF通知故障计算单元Fc。Fc执行故障计算后将故障计算结果通过门变迁gFP发送给各保护仿真单元并重新进行保护判断。当各保护仿真单元无拓扑变更信息时,此时Td中IMTF中无Token,其变迁t3可激发,可推进仿真时钟至下一个时间节点,并将保护动作信息通过门变迁gTP发送给各保护仿真单元。当各保护仿真单元均达到稳定状态,且Td中仿真时钟走至最后一个时间节点时,仿真结束,输出完整计算结果。具体过程如图6所示。

图6 保护仿真OOPN模型对象间的消息传递Fig.6 Message transfer among objects of OOPN model for protection simulation
2 算例仿真
简单电网结构图如图 1 所示。用<A1>、<A2>、<A3>分别表示接地距离保护Ⅰ、Ⅱ、Ⅲ段,<A4>、<A5>、<A6>、<A7>分别表示零序电流保护的Ⅰ、Ⅱ、Ⅲ、Ⅳ段。以保护仿真单元 PuA为例,其初始标识 M0= [(I2,<A1>+<A2> + <A3> + <A6> + <A7>),I6,I9];其中,(I2,<A1> +<A2>+<A3>+ <A6>+<A7>)表示库所 p2中含有颜色为<A1>、<A2>、<A3>、<A6>及<A7>的 Token。假设 0 s时k点发生单相接地故障,1 s后故障消失,预设PuC处的断路器会拒动,其仿真过程如下。
仿真初始化阶段,首先初始化Td中的cltTs和cltEvents,在cltTs中插入0s和1s的时间节点,其对应的cltEvents分别为故障出现事件及故障消失事件,TGlobal置为 0 s;每个 Pu的 p*中,bConnTd 和bNeedFc置为 FALSE,t_next置为 NULL;初始化外部事件向量E;初始化各种保护的动作判据,即约束集ST。
0 s时,激活Td中cltTs的0 s时间节点的故障发生事件,通知Fc进行故障计算,将故障结果发送至各保护仿真单元。进行动作判断后,各保护仿真单元标识如表4所示。
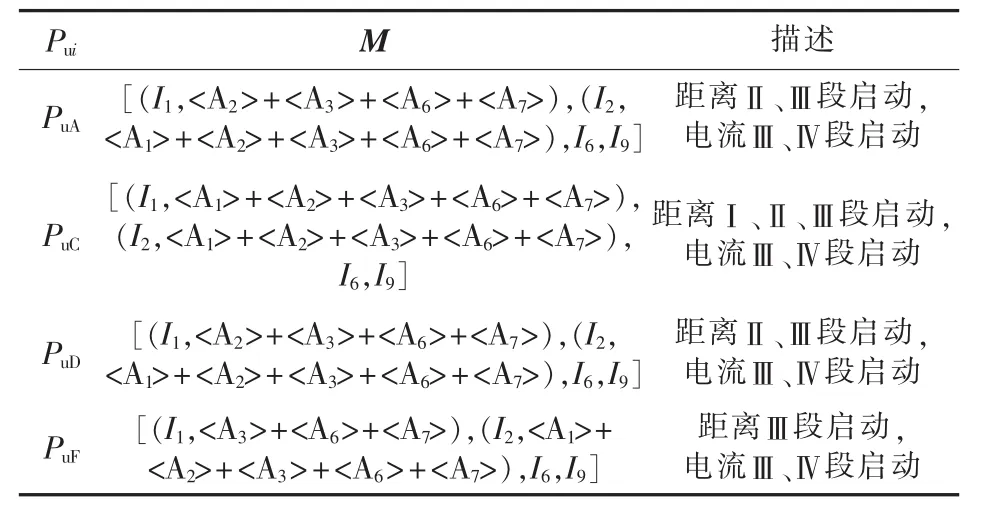
表4 各保护仿真单元标识Table 4 Marks of protection simulation units
然后各保护仿真单元将保护启动信息发送至Td,Td更新cltTs及cltEvents,并查找下一个时间节点为0 s(PuC的距离Ⅰ段动作),发送动作消息至PuC。PuC收到消息后其标识如表5所示。

表5 PuC标识Table 5 Mark of PuC
此时系统拓扑无变更,各保护仿真单元处于暂时稳定状态,Td查找cltTs对应的下一个时间节点为0.5 s(PuC、PuD距离Ⅱ段动作),发送动作消息至 PuC、PuD,同时推进TGlobal至0.5 s。由于PuC中断路器拒动,因此只考虑PuD,其标识如表6所示。

表6 PuD标识Table 6 Mark of PuD
此时由于系统拓扑结构变更,因此在更新cltTs及cltEvents后重新进行故障计算,然后各保护重新进行动作判断,各保护仿真单元的标识如表7所示。
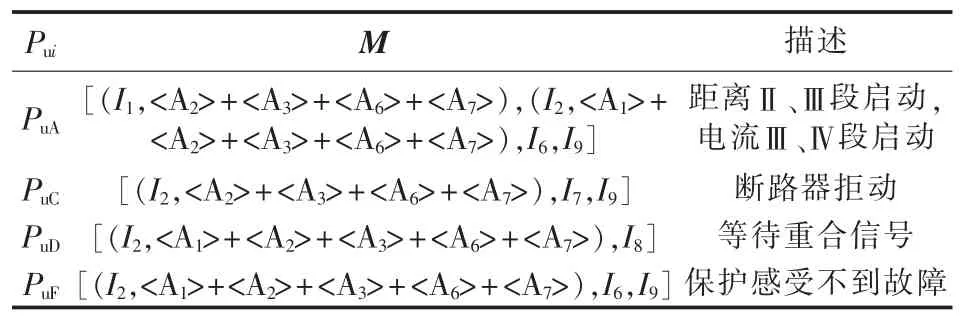
表7 各保护仿真单元标识Table 7 Marks of protection simulation units
各保护仿真单元向Td发送保护启动信息后,Td更新cltTs及cltEvents,然后推进仿真时钟至0.8 s(PuA距离Ⅱ段动作),向各保护仿真单元发送消息,同时推进TGlobal至0.8 s。PuA标识如表8所示。

表8 PuA标识Table 8 Mark of PuA
PuA的断路器跳开再次导致拓扑变化,重新进行故障计算,此时各保护均不再满足动作判据(各保护仿真单元处于“稳态”),Td查找cltTs对应的下一个时间节点为1 s(故障消失),通知Fc重新进行故障计算,此后无保护满足动作判据。
Td查找cltTs对应的下一个时间节点为1.5 s(PuD重合闸动作),发送动作消息至 PuD,同时推进TGlobal至1.5 s。PuD标识如表9所示。

表9 PuD标识Table 9 Mark of PuD
断路器重新闭合导致拓扑变化,重新进行故障计算,此时各保护均不再满足动作判据,Td查找cltTs对应的下一个时间节点为1.8 s(PuA重合闸动作),发送动作消息至PuA,同时推进TGlobal至1.8 s。PuA标识如表10所示。

表10 PuA标识Table 10 Mark of PuA
此后各保护均不再满足动作判据,Td中cltTs已无下一个时间节点,至此整个仿真过程结束。整个保护的动作过程为:<0 s,故障发生><0 s,PuC距离Ⅰ段动作,断路器拒动><0.5 s,PuD距离Ⅱ段动作,断路器跳开><0.8 s,PuA距离Ⅱ段动作,断路器跳开><1 s,故障消失><1.5 s,PuD重合闸动作,断路器闭合><1.8 s,PuA重合闸动作,断路器闭合>。
从算例仿真可以看出:在给定的系统结构和运行方式下,对一设定的初始故障,本文所提模型可以有效地完成模拟保护的动作行为以及保护间的配合过程。
实际系统中,调度员可通过设置故障和运行方式来模拟保护行为。模拟结果可以直观地用于校验保护定值的选择性和灵敏度是否满足要求,从而可以进行事故预想和评估离线整定的定值性能。基于OOPN模型的保护仿真模型易于软件实现,可用于调度员仿真培训中和定值在线校核的系统中保护仿真模块的研发。
3 结论
本文在传统单装置PN仿真模型的基础上,针对输电网的线路保护,提出了OOPN的建模方法。方法具有以下特点:
a.将断路器及其上装设的保护、重合闸封装为一个保护仿真单元,大幅降低了整体模型的复杂程度;
b.利用时间决策单元和保护仿真单元的消息传递来模拟保护的延时动作过程,并统一处理各种事件的时间配合关系,使得整个系统结构更清晰;
c.利用对象间的消息传递关系来模拟各种保护之间的相互配合关系,解决了传统PN难以描述保护之间的相互影响行为的缺点;
d.模型具有一定的可扩展性,对于新原理的线路保护,只需要给出其动作判据,就可以很方便地加入保护仿真单元中。
[1]刘强,蔡泽祥,詹少伟,等.基于实际装置的距离保护动态仿真研究[J]. 电力自动化设备,2007,27(11):8-11,41.LIU Qiang,CAI Zexiang,ZHAN Shaowei,et al. Dynamic simulation of distance protection based on real equipment[J].Electric Power Automation Equipment,2007,27(11):8-11,41.
[2]邹贵彬,高厚磊,江世芳.微机距离保护仿真系统的设计与实现[J]. 电力自动化设备,2007,27(9):88-90.ZOU Guibin,GAO Houlei,JIANG Shifang. Design and implementation ofsimulation system formicrocomputer-based distance protection [J].Electric Power Automation Equipment,2007,27(9):88-90.
[3]王为国,代伟,万磊,等.DTS中继电保护和安全自动装置仿真方法的分析[J],电力系统自动化,2003,27(5):58-60.WANG Weiguo,DAIWei,WAN Lei,etal.Study on the simulation methods of protection relay and security automatic equipment in Dispatcher Training Simulator(DTS)[J].Automation of Electric Power Systems,2003,27(5):58-60.
[4]JENKINS L,KHINCHA H P.Deterministic and stochastic Petri net models of protection schemes[J].IEEE Trans on Power Delivery,1992,7(1):84-90.
[5]WANG Fangming,TANG Jianxin.Modeling of a transmission line protection relaying scheme using Petri nets[J].IEEE Trans on Power Delivery,1997,12(3):1055-1063.
[6]朱林,蔡泽祥,刘为雄.Petri网描述的继电保护动作逻辑时序建模[J]. 继电器,2005,20(33):14-18,23.ZHU Lin,CAIZexiang,LIU Weixiong.Modelon the logic working procedure of relay schemes based on timed Petri net[J].Relay,2005,20(33):14-18,23.
[7]王磊,万秋兰.扩展时间Petri网在仿真保护及自动装置动作逻辑中的应用[J]. 电力系统自动化,2005,29(6):71-74,83.WANG Lei,WAN Qiulan.Extended time Petri net applied in action logic simulation of protection and automation equipment in DTS [J].Automation of Electric Power Systems,2005,29(6):71-74,83.
[8]杜新伟,刘涤尘,袁荣湘,等.基于高级Petri网的继电保护建模方案研究[J]. 电力自动化设备,2008,28(2):23-28.DU Xinwei,LIU Dichen,YUAN Rongxiang,et al. Relay protection modeling based on high-level Petri net[J].Electric Power Automation Equipment,2008,28(2):23-28.
[9]杜新伟,刘涤尘,袁荣湘,等.虚拟继电保护柔性建模仿真系统的研究[J]. 电力系统自动化,2008,32(17):55-60.DU Xinwei,LIU Dichen,YUAN Rongxiang,et al.Virtual protection flexible modeling and simulation system [J].Automation of Electric Power Systems,2008,32(17):55-60.
[10]徐岩,张锐,霍福广.应用模糊Petri网的继电保护行为评判[J].电力系统及其自动化学报,2014,26(7):76-81.XU Yan,ZHANG Rui,HUO Fuguang.Evaluating behavior of protections via fuzzy Petri net[J].Proceedings of the CSUEPSA,2014,26(7):76-81.
[11]杨永生.基于面向对象技术的微机保护仿真[J].电力自动化设备,2001,21(7):46-48.YANG Yongsheng.Simulation of microcomputer relay based on object-oriented technology[J].Electric Power Automation Equipment,2001,21(7):46-48.
[12]ZHU J,JOSSMAN P.Application of design patterns for objectoriented modeling of power system [J].IEEE Transactions on Power Systems,1999,14(2):532-537.
[13]袁崇义.Petri网原理与应用[M].北京:高等教材出版社,2005.
猜你喜欢
实验室研究与探索(2020年11期)2020-12-11
中国粮食经济(2018年12期)2018-12-30
中国粮食经济(2018年10期)2018-12-30
中国粮食经济(2018年11期)2018-12-27
电子制作(2018年14期)2018-08-21
电子制作(2018年10期)2018-08-04
人大建设(2017年6期)2017-09-26
电子制作(2017年8期)2017-06-05
电子制作(2017年20期)2017-04-26
天津科技大学学报(2014年4期)2014-02-27
