
基于负载转矩观测器的PMSM抗负载扰动控制策略
2016-05-20 07:38:45王培良蔡志端李祖欣吕帅帅
电工电能新技术 2016年5期
荀 倩, 王培良, 蔡志端, 李祖欣,吕帅帅
(1. 湖州师范学院工学院, 浙江 湖州 313000; 2. 西北工业大学自动化学院, 陕西 西安 710072)
基于负载转矩观测器的PMSM抗负载扰动控制策略
荀 倩1, 王培良1, 蔡志端1, 李祖欣1,吕帅帅2
(1. 湖州师范学院工学院, 浙江 湖州 313000; 2. 西北工业大学自动化学院, 陕西 西安 710072)
为提高永磁同步电机转速环的抗扰特性,本文提出一种基于转矩电流前馈补偿的永磁同步电机抗负载扰动控制策略,在转矩电流中加入负载转矩的补偿。为此,在降阶负载转矩观测器的基础上,提出一种改进型的观测器,在原有积分环节中加入比例环节对负载转矩进行实时观测,能有效提高负载转矩观测的收敛速度。仿真和实验结果表明负载转矩的观测具有一定的实时性,引入转矩电流的前馈补偿可以提高永磁同步电机转速环的鲁棒性。
转矩电流前馈补偿; 负载扰动; 改进型的观测器; 鲁棒性
1 引言
永磁同步电机(PMSM)具有结构简单、运行可靠、功率密度大和效率高等优点,且易构成高性能的伺服系统,已被广泛应用于航空航天、军用、汽车和家用等产品[1]。电机在运行中会受到各种外扰力的影响,特别是在负载发生变化时,电磁转矩和负载转矩瞬间失衡,造成转速调节有一定的滞后,而高性能调速系统要求系统应保证稳态无静差,动态情况下响应速度快[2],并且,在一些负荷变化且不确定的条件下,应具有一定的抗扰性能。
负载扰动不仅对永磁同步电机稳态精度有影响,而且影响着整个控制系统的精度、动态性能和调速范围等性能指标[3,4]。因此,研究一种永磁同步电机抗负载扰动方案具有重要的实际意义。传统的转速控制器在设计时一般会假定负载转矩扰动为零或者为一个固定值,但对于负荷变化且不确定的条件下,这个控制器并不能很好地抑制负载扰动。如何使控制系统在负载扰动的情况下保证响应快且无超调是高性能调速系统的关键。
电机在实际运行中,由于负载时变且不可预测,仅采用PI调节器不能很好地抑制负载扰动带来的转速波动,需要对各个性能指标进行折中考虑。针对抗负载扰动的问题,引入负载转矩的前馈补偿,转换成两自由度控制系统是一个比较好的解决方案[5]。但是如果要对负载转矩直接测量,会使系统成本较高,并且仪器精度和响应速度都会影响负载转矩的测量[6,7],所以采用状态观测器对负载转矩进行观测是一个很好的选择。
目前,国内外学者对负载转矩的观测进行了不少研究。文献[8]采用一阶伪微分结构,设计了扰动转矩观测器,并对转矩电流进行了补偿,但是该方法中的微分运算容易将测量误差和计算误差放大,影响观测精度;文献[9]将降阶负载转矩观测器应用到伪微分反馈控制系统中,实现了抗扰动伪微分反馈控制,但是只完成了仿真验证,并未给出实验结果;文献[10-13]采用滑模观测器对负载转矩进行观测,而如何在提高滑模变结构控制系统抗扰性能的同时削弱抖振现象一直是其研究的热点问题;文献[14]根据降阶负载转矩观测器收敛速度慢的缺点,提出了一种改进型的观测器,可以提高辨识的收敛性,但仅给出仿真分析,并未进行实验验证;文献[15]在全阶滑模观测器的基础上,提出了一种新型转矩观测器,解决了积分初始值和积分漂移的问题。
本文在降阶观测器的基础上,提出一种改进型的负载转矩观测器。新型观测器根据电机的转速和转矩电流,将比例和积分引入负载转矩的观测中,可提高辨识收敛性和辨识收敛速度,将观测到的负载转矩值按比例前馈补偿给转矩电流调节器的输入。在系统负载突变时,利用该观测器对转矩电流进行前馈补偿能减小负载变化对电机转速的影响,从而提高永磁同步电机转速环的鲁棒性。
2 负载转矩观测器
在电气传动中,电机通过其传动轴向负载提供电磁转矩,通过对电机传动轴上电磁转矩的控制就可以完成对负载运动的控制。根据动力学原理,可得永磁同步电机的机械运动方程为:
(1)
(2)
式中,Te为电磁转矩;J为系统转动惯量;ωm为转子机械角速度;bm为摩擦系数;θm为机械角度;Tl为负载转矩,其包含由电机空载损耗产生的电机空载转矩。
当控制器采样周期很小、采样频率很高时,可近似认为在一个采样周期中负载转矩T1是一个恒定值,即:
(3)
将式(1)~式(3)写成状态方程的形式:
(4)
式中
u=Te,C=[1 0 0],y=θm
2.1 降阶负载转矩观测器
采用降阶思想构建负载转矩观测器:
(5)
式中

将电机的运动方程应用到式(5),可得:
(6)
式中,k1、k2为反馈系数。
观测器的特征方程可表示为:
(7)

λ2-(α+β)λ+αβ=0
(8)
则可得:
(9)
如忽略摩擦系数bm,则根据式(6)可得出:
(10)
根据式(10)可搭建降阶负载转矩观测器,如图1所示。其中,Pn为电机极对数;ψf为永磁体磁链;iq为交轴电流。可以看出,降阶观测器是以积分形式对负载转矩进行观测,收敛速度较慢[11]。
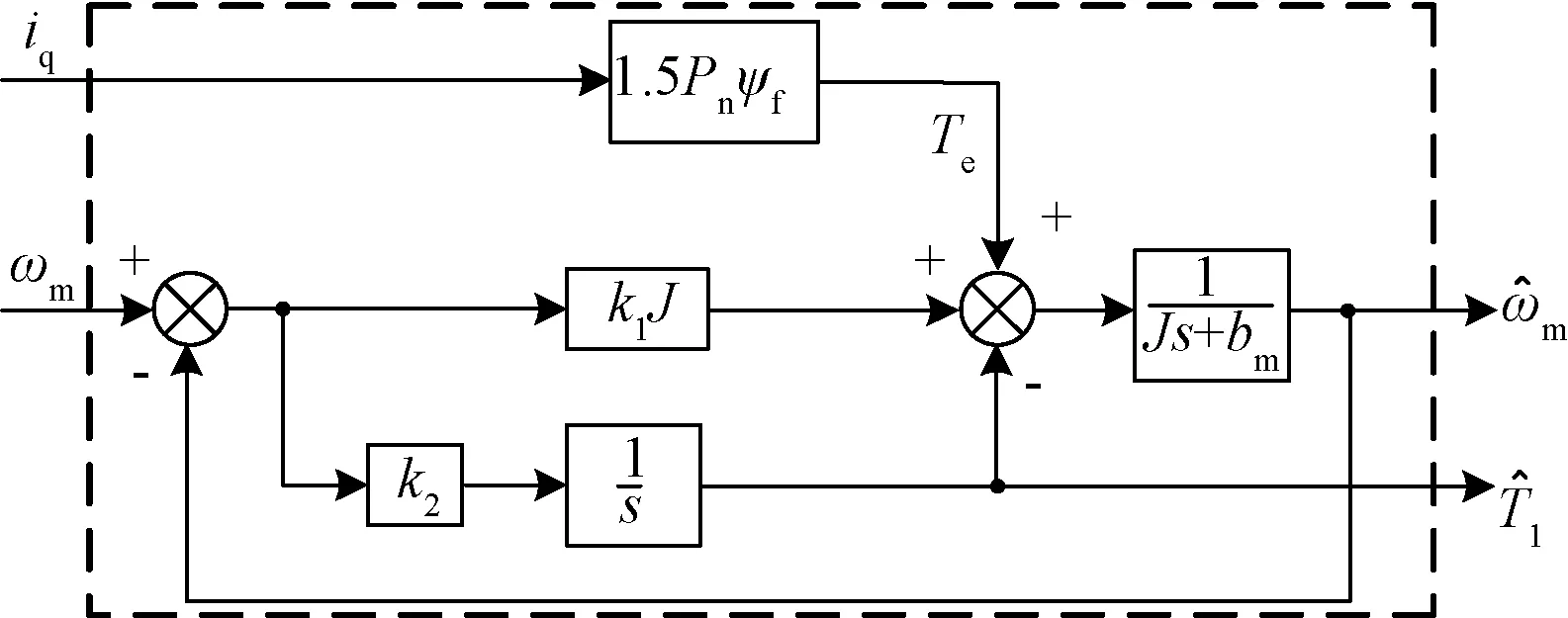
图1 降阶负载转矩观测器结构框图Fig.1 Block diagram of reduced order observer
2.2 新型负载转矩观测器
为提高负载转矩观测的收敛速度,提出一种新型的负载转矩观测器,构建状态方程:
(11)
式中
x=[ωmT1]T,y=ωm
构建负载转矩观测器:
(12)

由式(11)和式(12)可得:
(13)
(14)
根据期望极点α、β,以及期望的观测器表达式(8),则可得:
(15)
假设bm=0,设计k1=k3=0,则可得状态反馈系数的值:
(16)
根据式(12)可得出:
(17)
根据式(17)可构造负载转矩观测器,如图2所示。由此可见,与传统的降阶负载转矩观测器相比,负载转矩的观测由原来的积分改进为积分+比例,可有效提高辨识收敛速度。
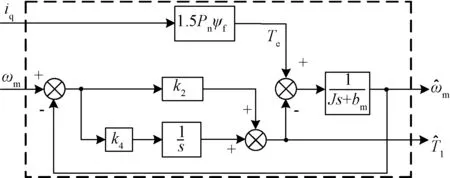
图2 新型负载转矩观测器结构框图Fig.2 Block diagram of improved load torque observer
3 抗负载扰动控制
3.1 PMSM矢量控制策略
采用id=0的转子磁场定向的矢量控制系统如图3所示。
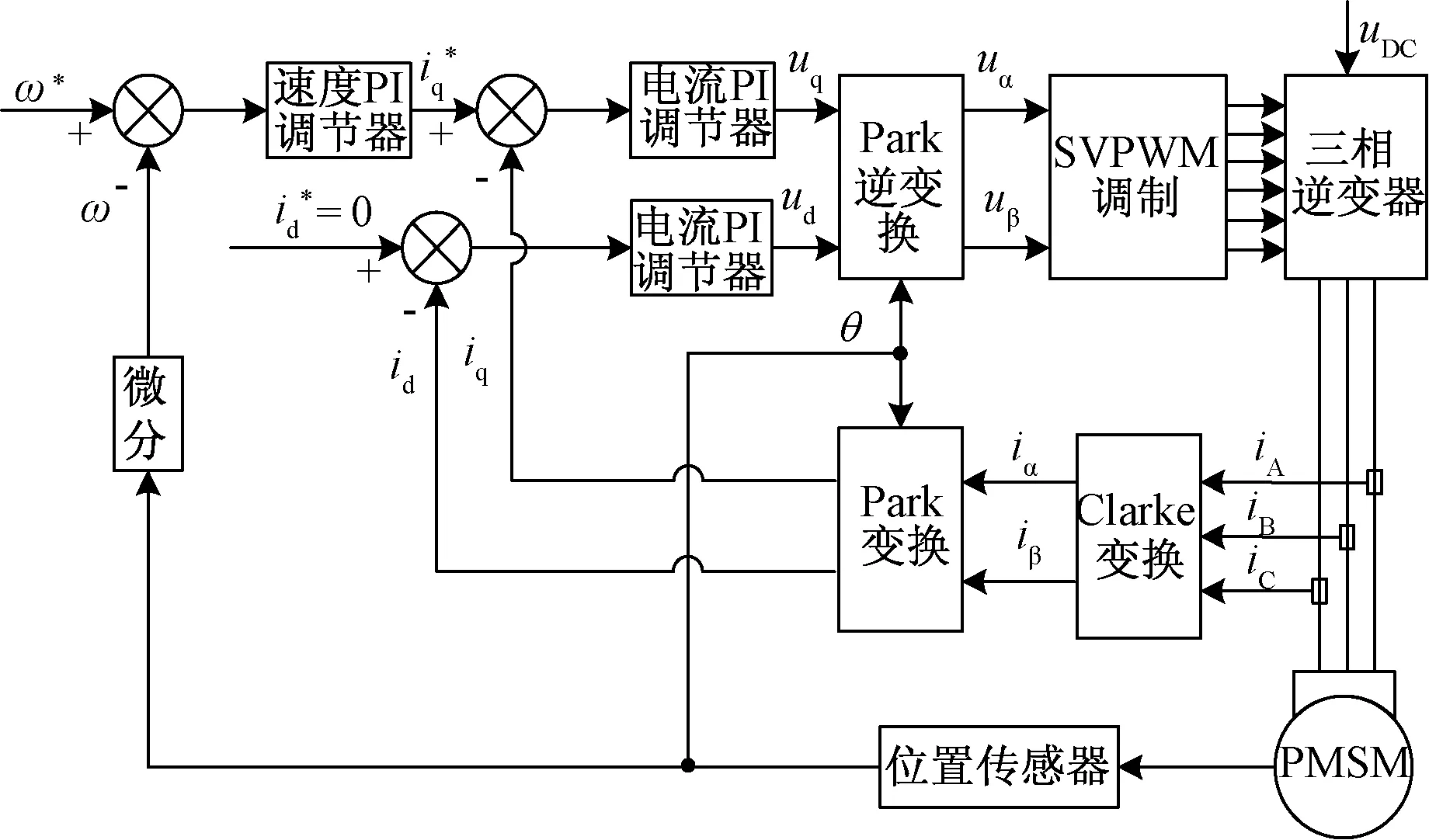
图3 矢量控制框图Fig.3 Vector control diagram
将电流环作为转速环控制对象的一部分,可得系统转速环传递函数结构图,如图4所示。其中Kc为转矩常数。由于摩擦系数bm较小,可忽略不计。在该系统中,负载扰动作用在电流环之后,仅依靠转速调节器产生抗扰动作用有一定的滞后,可在转矩电流中加入扰动补偿,对转矩电流进行前馈补偿。

图4 矢量控制速度环模型Fig.4 Vector control speed loop model
3.2 转矩电流前馈补偿控制

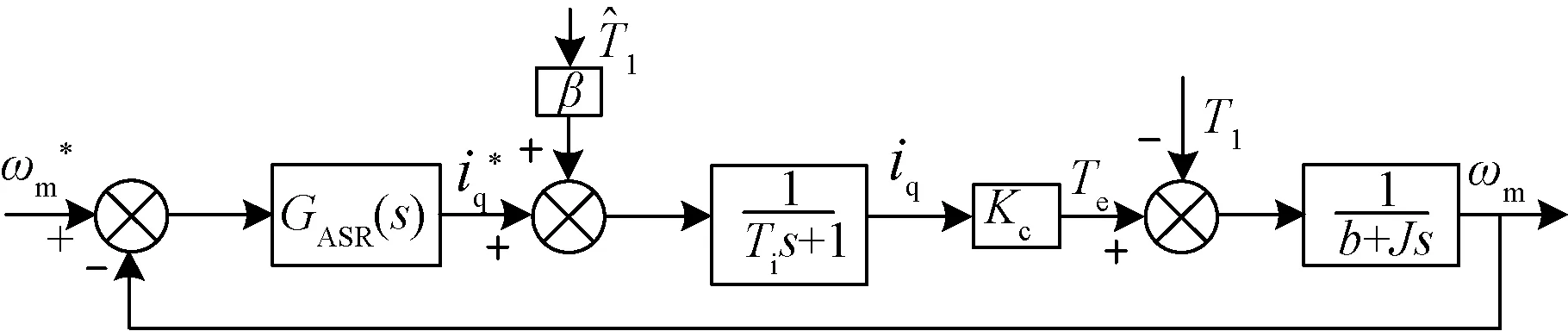
图5 永磁同步电机抗负载扰动控制系统框图Fig.5 Block diagram of PMSM anti-load disturbance control system
Te=1.5Pnψfiq
(18)
由式(18)中转矩与电流之间关系,可以得出补偿系数β应该取2/(3Pnψf)。
4 仿真与实验
4.1 仿真验证
电机控制系统仿真模型参照实际系统搭建,由以下部分构成:①电源、逆变器、电机等功率部分;②电流控制器、速度控制器等控制部分;③检测和显示部分。电机仿真模型中参数参照实际电机参数,如表1所示。仿真采用与实验对应的标幺值系统,转速基值取3000r/min,电流基值取18A,转矩基值取5N·m。

表1 永磁同步电机参数Tab.1 Parameters of PMSM
为验证观测器的观测性能,根据图1和图2搭建相应的仿真控制框图,仿真条件为电机空载启动,给定转速为1pu,在0.2s时电机突加负载1pu,0.4s时负载阶跃至0.5pu,降阶观测器和改进型观测器的仿真结果如图6所示。

图6 负载转矩观测器仿真结果Fig.6 Simulation results of load torque observer
可以看出,降阶观测器在负载突变瞬间需要0.003s的时间恢复稳态,稳态误差约为0.0006pu,而改进型观测器在负载突变瞬间,能很快跟踪实际负载转矩变化,准确度高,以上仿真验证了改进型观测器的可行性与有效性。因此,以下仿真及实验将对比未加入改进型观测器与引入改进型观测器时,系统的抗负载扰动特性,以验证本文提出的转矩电流前馈补偿的抗负载扰动控制策略的有效性。
根据图5所示的系统框图,搭建抗负载扰动控制系统的仿真模型,对转矩电流前馈补偿前后的转速、电流及负载转矩观测值进行仿真,其仿真结果如图7所示,自上至下波形依次为转速、负载转矩、q轴电流和a相电流。给定转速为1pu,0.2s时突加5N·m负载,0.3s时突卸5N·m负载,电机额定转矩为5N·m,额定电流为6A,根据T=Kci,可以计算出转矩常数Kc为5/6,即为补偿系数β。
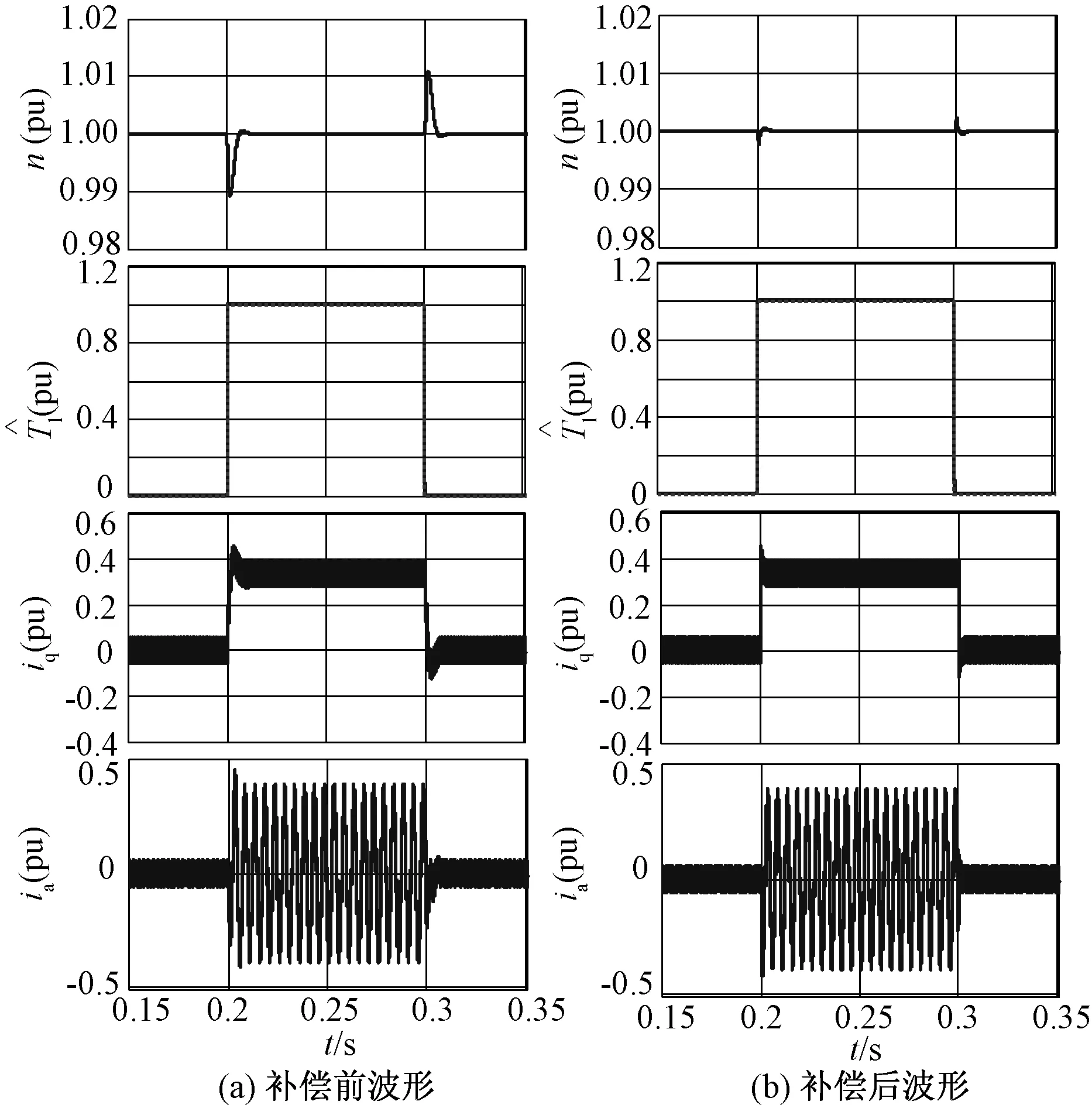
图7 转矩电流前馈补偿前后仿真波形Fig.7 Simulated waveforms before and after current feed forward compensation
由仿真结果可以看出,未引入转矩电流前馈补偿的情况下,0.2s突加5N·m负载时,转速下降0.01pu,动态调节时间约为0.02s;0.3s突卸5N·m负载时,转速上升0.01pu,动态调节时间约为0.02s;电流iq的调节存在一定延时,导致转速跌落幅度较大,一段时间之后才得以恢复。而加入转矩电流前馈补偿之后,转速波形下降和上升的幅度明显减小,约为0.002pu,转速波动得到了快速抑制,但是转速波形在突加和突卸负载瞬间有一个很小的毛刺,转速波动没有完全抑制,这是因为负载转矩的观测存在一定延时,因此提高负载转矩观测器的实时性和快速性对系统抗负载扰动具有很好的促进作用。
4.2 实验验证
为了进一步验证抗负载扰动控制策略的实用性和有效性,搭建基于TMS320F2812DSP芯片的抗负载扰动测试平台,其由负载模拟器、联轴节、转矩传感器、加载电机、加载驱动器、负载控制&驱动器、控制器和计算机组成,实验系统如图8所示。
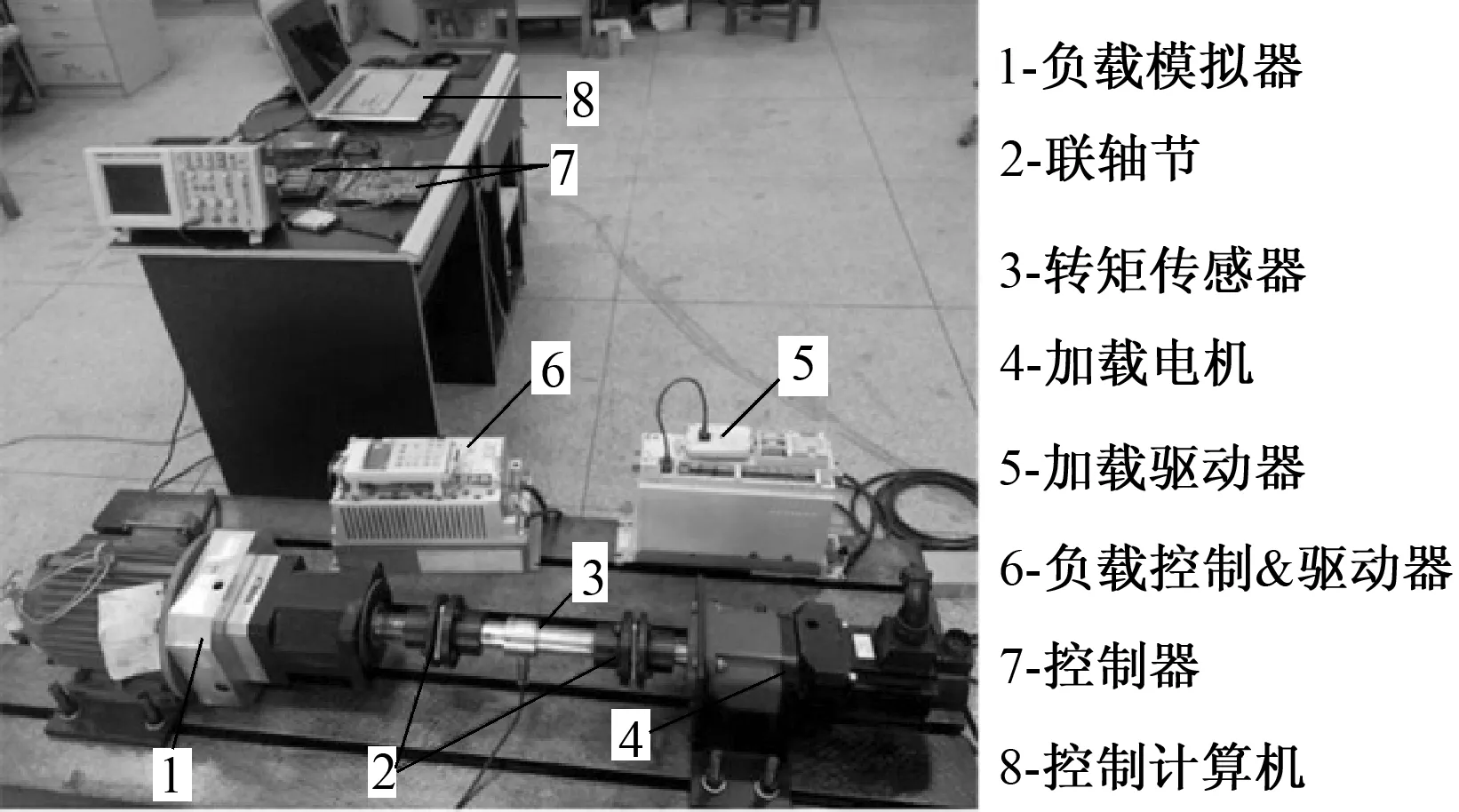
图8 抗负载扰动测试平台Fig.8 Test platform of anti-load disturbance
在电机启动超调满足要求的前提下,给定转速为0.4pu,突加突卸3N·m负载时矢量控制系统的实验波形如图9所示。由此可见,负载突变时,系统鲁棒性较差,电机转速易受影响。
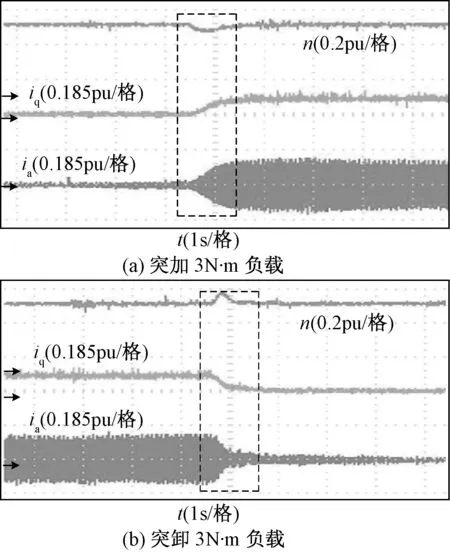
图9 矢量控制系统突加突卸负载响应Fig.9 System response of load mutation in vector control
为提高转速环的鲁棒性,首先对改进型观测器的负载转矩观测性能进行测试,实验结果如图10所示。图10(a)和图10(b)分别为转速恒定为0.4pu时突加3N·m和突卸3N·m负载时的实验波形。从实验结果来看,转矩观测值在恒定转速情况下可以在1s内达到稳态,具有一定的实时性,并且稳态观测值与实际转矩相同。
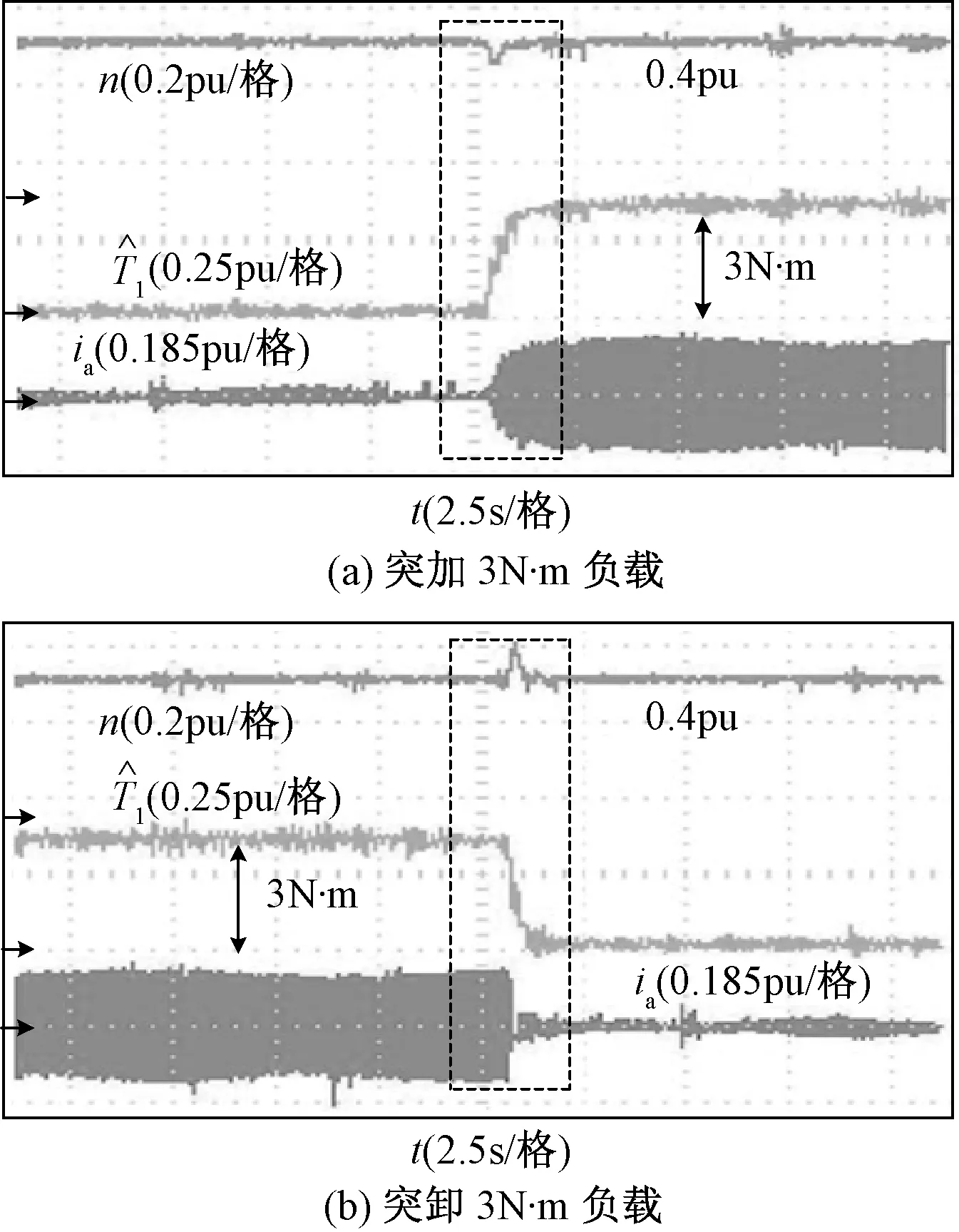
图10 负载观测器实验结果Fig.10 Experimental results of novel load observer
将图10的负载转矩折算成电流前馈至电流给定,得到的引入负载转矩观测器前馈补偿时的实验波形,如图11所示。系统转速为0.4pu,负载转矩变化时,电机转速基本上不受影响。

图11 引入转矩电流前馈补偿时,突加突卸负载响应Fig.11 System response of load mutation with torque current feed-forward compensation introduced
由图9和图11可以看出,当负载转矩发生变化时,引入转矩电流的前馈补偿,转速波动幅值和动态调节时间均有所减小,相比于未加入转矩电流的前馈补偿,转速环的抗扰性能有所提高。
5 结论
本文在完成永磁同步电机矢量控制的基础上,为提高转速环的鲁棒性,对抗负载扰动控制策略进行了研究,搭建了基于Matlab/Simulink的仿真平台和基于TMS320F2812DSP芯片的实验平台,对本文提出的控制策略进行了验证,得到如下结论:
(1) 采用改进型的降阶观测器对永磁同步电机负载转矩进行观测,响应速度快,观测精度高。
(2) 选用合适的补偿系数将观测到的负载转矩作为转矩电流的前馈补偿,可以补偿负载转矩变化引起的转速波动。
(3) 本文提出的基于负载转矩观测器的PMSM抗负载扰动控制策略可以提高永磁同步电机转速环的抗扰动性能。
[1] Dutta R, Rahman M F. Design and analysis of an interior permanent magnet (IPM) machine with very wide constant power operation range [J]. IEEE Transactions on Energy Conversion, 2008, 23(1): 25-33.
[2] 陈伯时(Chen Boshi). 电力拖动自动控制系统(Electricity pull automation control system) [M]. 北京: 机械工业出版社 (Beijing: China Machine Press), 2007.
[3] 刘清, 王太勇, 董靖川, 等 (Liu Qing, Wang Taiyong, Dong Jingchuan, et al.). 基于ESO 的永磁同步电机直接转矩控制 (Direct torque control of permanent magnet synchronous motors based on ESO) [J]. 电工电能新技术 (Advanced Technology of Electrical Engineering and Energy), 2012, 31(1): 35-38.
[4] 李天云, 张志华, 陈峰, 等 (Li Tianyun, Zhang Zhihua, Chen Feng, et al.). 基于 ESO 的积分 Terminal 滑模励磁系统控制 (Integral terminal sliding mode control for excitation system based on ESO) [J]. 电工电能新技术 (Advanced Technology of Electrical Engineering and Energy), 2013, 32(1): 32-42.
[5] 郑泽东, 李永东, 肖曦, 等 (Zheng Zedong, Li Yongdong, Xiao Xi, et al.). 永磁同步电机负载转矩观测器(Load torque observer of permanent magnet synchronous motor) [J]. 电工技术学报 (Transactions of China Electrotechnical Society), 2010, 25(2): 30-36.
[6] Senjyu T, Shingaki T, Uezato K. Sensorless vector control of synchronous reluctance motors with disturbance torque observer [J]. IEEE Transactions on Industrial Electronics, 2001, 48(2): 402-407.
[7] Gasc L, Fadel M, Astier S, et al. Load torque observer for minimizing torque ripple in PMSM [A]. ICEMS 2003 [C]. 2003. 2: 473-476.
[8] 纪科辉, 沈建新 (Ji Kehui, Shen Jianxin). 采用扰动转矩观测器的低速电机伺服系统 (A low speed servo motor drive system with disturbance torque observers) [J]. 中国电机工程学报 (Proceedings of the CSEE), 2012, 32(1): 100-106.
[9] 幸权,唐猛,张兵 (Xing Quan, Tang Meng, Zhang Bing). 基于负载观测的抗扰动伪微分反馈策略电机控制(Anti-disturbance pseudo derivative feedback strategy for motor control based on a load observer) [J]. 信息与控制(Information and Control), 2015, 44(2): 142-146.
[10] 郭鸿浩, 周波, 刘颖, 等 (Guo Honghao, Zhou Bo, Liu Ying, et al.). 基于负载转矩观测的风力机动静态特性模拟 (Static and dynamic behaviour emulation of wind turbine based on load torque observation) [J]. 中国电机工程学报 (Proceedings of the CSEE), 2013, 33(27): 145-153.
[11] 张晓光, 孙力, 赵克 (Zhang Xiaoguang, Sun Li, Zhao Ke). 基于负载转矩滑模观测的永磁同步电机滑模控制 (Sliding mode control of PMSM based on a novel load torque sliding mode observer) [J]. 中国电机工程学报 (Proceedings of the CSEE), 2012, 32(3): 111-116.
[12] 王志宇, 王长松, 齐昕, 等(Wang Zhiyu, Wang Changsong, Qi Xin, et al.). 永磁同步电机自适应滑模负载观测器研究 (Study on MRAS sliding-mode load torque observer based on PMSM) [J]. 电机与控制学报(Electric Machines and Control), 2012, 16(1): 45-49.
(,cont.onp.54)(,cont.fromp.41)
[13] 陈天翔, 张辑, 彭彦卿 (Chen Tianxiang, Zhang Ji, Peng Yanqing). 基于转矩滑模观测器的抗负载扰动控制方法 (Anti-load disturbance control method based on torque sliding mode observer) [J]. 电力系统保护与控制(Power System Protection and Control), 2013, 41(8): 114-118.
[14] 张强, 叶林, 石航飞, 等 (Zhang Qiang, Ye Lin, Shi Hangfei, et al.). 交流伺服系统负载转矩的辨识方法(Estimation algorithm of load torque for AC servo system) [J]. 兵工自动化 (Ordnance Industry Automation), 2014, 33(4): 47-49.
[15] 朱云国, 阚超豪 (Zhu Yunguo, Kan Chaohao). 一种永磁同步电机定子磁链和电磁转矩观测器 (A stator flux and electromagnetic torque observer for permanent magnet synchronous motor) [J]. 电力系统自动化(Automation of Electric Power System), 2014, 38(16): 115-120,126.
Anti-load disturbance control strategy of PMSM based on load torque observer
XUN Qian1, WANG Pei-liang1, CAI Zhi-duan1, LI Zu-xin1, LV Shuai-shuai2
(1. School of Engineering, Huzhou University, Huzhou 313000, China; 2. College of Automatic Control, Northwest Polytechnic University, Xi’an 710072, China)
In order to improve the anti-disturbance characteristics of the PMSM speed loop, a new method based on the feedforward compensation of the torque current was presented in the paper. To this end, based on the reduced order load torque observer, an improved observer is proposed, which can effectively improve the convergence rate of the load torque observation in the original integral part of the load torque. Simulations and experiments show that the observation of the load torque has a certain real-time performance, and the feedforward compensation of the torque current can improve the robustness of PMSM.
feedforward compensation of torque current; load disturbance; improved observer; robustness
2015-08-18
国家自然科学基金(61573137)、 湖州市自然科学基金(2013YZ05)、 湖州市公益性技术应用研究计划(2015GZ05)资助项目
荀 倩(1990-), 女, 陕西籍, 硕士, 研究方向为电机控制、 电力电子与电力传动; 王培良(1963-), 男, 浙江籍, 教授, 硕士, 研究方向为智能控制、 故障诊断。
TM315
A
1003-3076(2016)05-0036-06
猜你喜欢
应用数学(2020年4期)2020-12-28 00:36:52
防爆电机(2020年6期)2020-12-14 07:16:54
光学精密工程(2016年3期)2016-11-07 09:03:49
铁道科学与工程学报(2015年5期)2015-12-24 12:12:08
深空探测学报(2015年3期)2015-12-07 11:15:06
电源技术(2015年11期)2015-08-22 08:50:58
空间控制技术与应用(2015年2期)2015-06-05 12:24:55
航空学报(2015年4期)2015-05-07 06:43:34
电测与仪表(2015年19期)2015-04-09 11:32:56
大电机技术(2015年5期)2015-02-27 08:22:28
