
四象限斩波控制直流调速系统的技术研究
2016-05-17 03:31:06李一鸣易学良湖南理工学院计算机学院湖南岳阳44006湖南理工学院信息与通信工程学院湖南岳阳44006
湖南理工学院学报(自然科学版) 2016年1期
李一鸣,荣 军,邓 斌,易学良(.湖南理工学院 计算机学院,湖南 岳阳 44006; .湖南理工学院 信息与通信工程学院,湖南 岳阳 44006)
四象限斩波控制直流调速系统的技术研究
李一鸣1,荣 军2,邓 斌1,易学良1
(1.湖南理工学院 计算机学院,湖南 岳阳 414006; 2.湖南理工学院 信息与通信工程学院,湖南 岳阳 414006)
摘 要:直流电动机具有调速范围广以及调速精度高的特点,因此在要求调速和制动性能高的工业领域有非常广泛的应用.本文首先介绍了直流电机的数学模型,给出其调速的三种方法,最后选择改变电枢电压作为其调速的方法.然后详细分析了四象限斩波控制直流调速的工作原理,并且在Matlab/Simulink中建立了四象限斩波控制直流调速模型,并给出了其仿真结果.仿真结果与理论分析完全一致,验证了四象限斩波控制直流调速系统理论分析和建模仿真的正确性.最后通过与其它两种斩波直流调速系统仿真结果比较,显示了四象限斩波控制直流调速系统的优越性.
关键词:直流调速; 四象限; 斩波控制; 建模与仿真
引言
直流电机调速与交流调速系统相比,具有优良的起动、调速和制动性能,能实现频繁的无级快速起动、调速、制动以及反转,另外还有调速范围广和调速精度高的优点,因此能够满足大多数工业生产过程中自动化系统的特殊要求[1,2],一直以来在调速传动领域中占有一席之地.在工农业生产生活中,有些生产机械需要电机经常处于正转、反转、电动以及制动的四种工作状态,比如常见的可逆轧钢机等.如果要实现直流调速工作的四种状态,就必须应用四象限斩波电路.基于此,本文对四象限斩波控制直流调速系统进行了研究,介绍其工作原理,对其进行建模和仿真,并与其他两种直流斩波控制直流调速系统进行比较研究.研究结果表明四象限斩波控制直流调速系统具有稳定性好以及调速范围广等优点.
1 直流电动机的数学模型及调速方式
1.1 直流电动机的数学模型
直流电机数学模型的基本方程[3]包括:
励磁电路电压方程:

其中uF和iF分别为励磁电压和励磁电流,RF和LF分别为励磁回路的电阻和电感.电枢电路电压方程:

其中ua和ia分别为电枢电压和电流,Ra和La分别为电枢回路的电阻和电感,E为电枢感应电动势,n为转子转速,CE为电动势常数.
电机转矩方程:

其中Te为电磁转矩,ω为电机转子机械角速度,J为转动惯量,Bm为干摩擦系数,Tf为库仑摩擦转矩,KT为转矩系数.
1.2 直流电动机的调速方式
对直流电机调速进行分类比较,可以更好地弄清各种调速方法的工作原理和特点,根据其特点可以选择最合适的调速方法,从而提高电机系统设计和使用的效率.
直流电机调速的种类[4]有:
(1)调节电枢电压Ua
改变电枢电压是要降低电枢电压,让电动机从额定转速向下降低转子速度,属于恒转矩调速.其优点是调速平滑性好、范围大,对于需要在一定范围内无级平滑调速的系统来讲,这种方法比较好.此外,其调速反应时间常数比较小,能够快速响应,调速系统的动态性能比较好.缺点则是需要较大容量可以调节的直流电源,前期投入比较大.
(2)改变励磁绕组的主磁通Φ
通过改变励磁电流大小,来改变磁通,能够实现无级平滑调速,调速稳定性好,但只能弱磁调速,调速范围不大,调速方向是往上调,属于恒功率调速方法.而且调速系统的响应速度比较慢,相比较改变电枢电压调试它所需要的电源容量比较小,前期投资费用不高.
(3)电枢回路串电阻调速Ra
通过在电枢回路串联电阻进行调速的优点是操作简便,运行成本低廉.缺点是调速平滑性差,只能够进行有级调速,而且调速稳定性差,机械特性比较软,空载时没有什么调速作用,调速电阻会消耗大量能量,从而导致整个调速系统效率低下.
综上所述,在直流电动机的三种调速方法中,调节电枢供电电压Ua是一种性能相对比较优越的调速方法,本文选择改变电枢电压作为直流电机的调速方法.
2 四象限斩波控制电路的工作原理
为了弄清四象限斩波控制电路的工作原理,本文首先介绍降压斩波电路和升压斩波电路,因为这两种斩波电路是分析四象限斩波控制电路的基础.
2.1 降压斩波电路工作原理介绍
降压斩波电路的工作电路以及工作波形图如图1(a)和(b)所示[5].图1(a)中电路使用一个全控器件IGBT,即为VT.VD为续流二极管,为了在VT关断时给负载电感电流提供通道,在拖动直流电机等负载时,会出现反电动势Em.在图1(b)所示的波形为VT的栅射电压UGE波形,在t =0时驱动VT导通,电源E向负载电路供电,此时负载电压U0= E ,iL呈指数曲线上升.当t= t1时,控制VT关断,iL经过二极管VD续流,负载电压接近为零,iL按指数曲线下降.一般串联的电感值较大,为了使负载电流不断流且脉动小,负载电压平均值为:

其中α为导通的占空比.由式(6)可知,输出电压平均值U0最大为E,若减小占空比α,则U0也减小.假设图1(a)电路中的负载是直流电动机,则电机只能工作在第一象限.
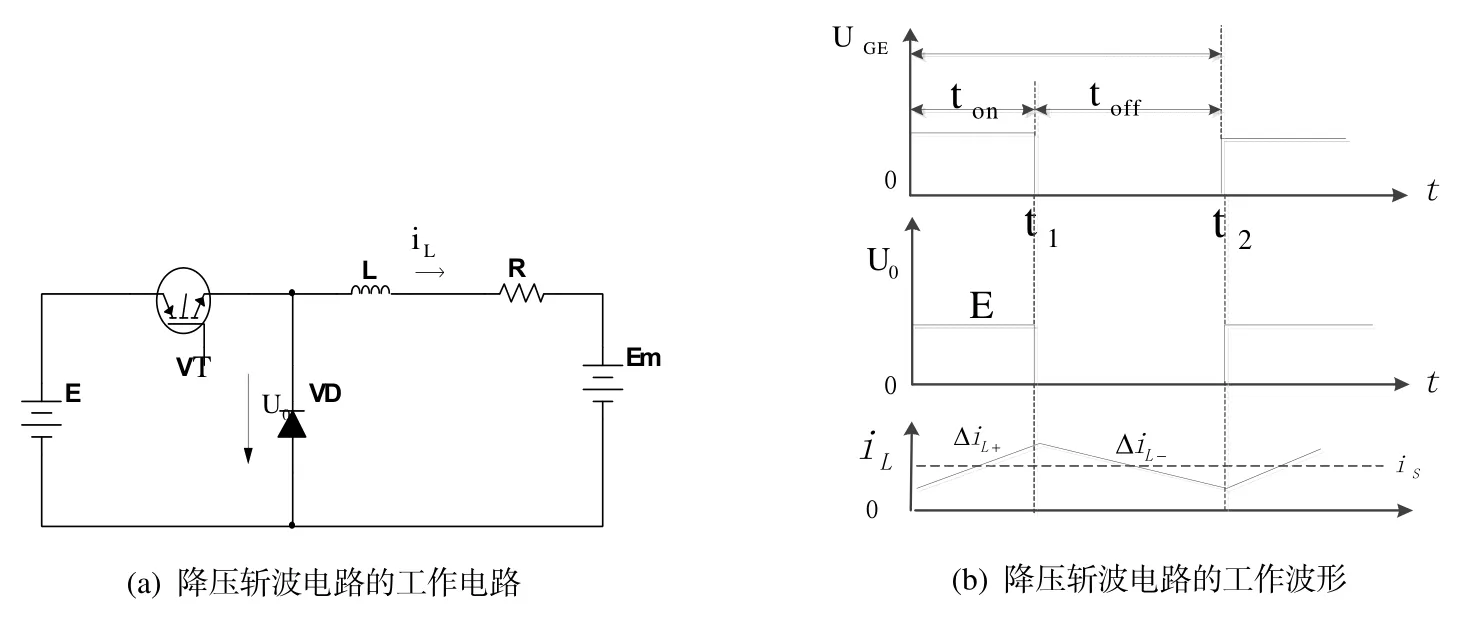
图1 降压斩波电路的原理图和波形图
2.2 升压斩波电路的工作原理


化简得

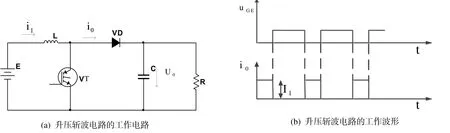
图2 升压斩波电路的原理图和波形图
2.3 电流可逆斩波电路的工作原理
由上面分析可知在升压和降压斩波电路中,电枢电流的方向不同,但是都只能在一个方向流动.而电流可逆斩波电路将升压和降压电路结合起来,拖动直流电机运行时,其电机电枢电流可正可负,只是电压只有一种极性,因此电机可以工作在第一和第二象限.图3(a)和(b)给出了电流可逆斩波电路的工作电路和工作波形图[6].在图3(a)电路中,T1和VD2构成降压斩波电路,电源向直流电机供电,电动机处于电动运行状态,此时电机工作在第一象限.T2和VD1构成升压斩波电路,把直流电机的动能变为电能反馈到E,并存储在电源E中,此时电机处于再生制动运行状态,电机工作在第二象限.
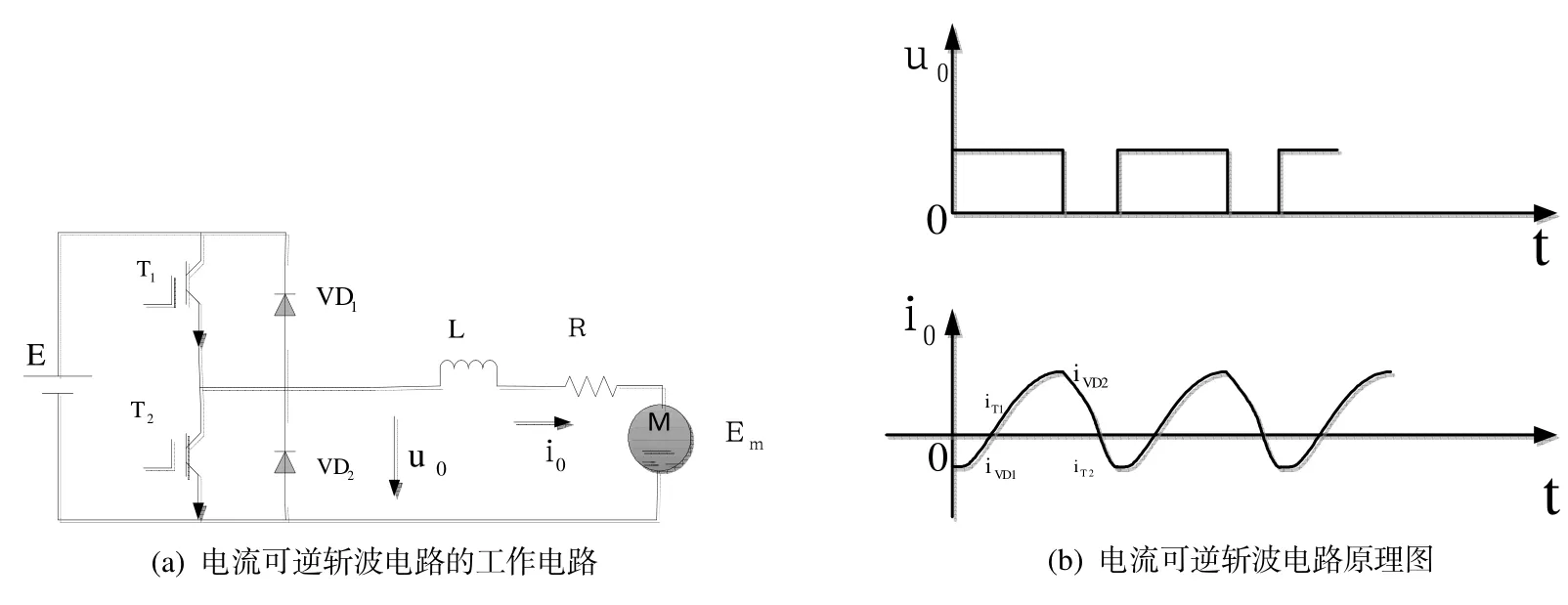
图3 电路可逆斩波电路的原理图和波形图
2.4 四象限斩波控制电路的工作原理
由于电流可逆斩波电路提供的电枢电压为单极性,而电枢电流为双极性,所以电机只能工作在两象限状态.如果要使电机处于电动和制动工作状态,可以考虑将两个电流可逆电路组合起来,分别向电机提供正向和反向电压即可,这就是本文所研究的四象限斩波控制电路,其工作电路原理图[6]如图4所示.当V4保持导通状态时,V4、V1和VD1组成四象限斩波控制直流调速系统向电机提供正向电压,可以使得电机工作在第一和第二象限,即正转电动和正转再生制动状态.此时,需要防止V3导通造成电路短路.当V2保持导通状态时,V3、VD3、V4和VD4构成可逆斩波电路,向电机提供反向电压,可以使得电机工作在第三和第四象限,其中V3和VD3构成降压斩波电路,使得电机工作在第三象限,即反转电动状态,V4和VD4构成升压斩波电路,使得电机工作在第四象限,即反转再生制动状态.
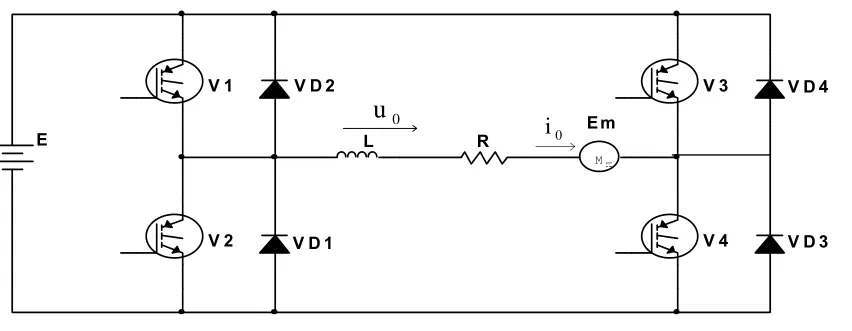
图4 四象限斩波控制电路原理图

图5 四象限斩波控制直流调速系统的仿真模型
3 四象限斩波控制直流调速系统的建模与仿真
3.1 四象限斩波控制直流调速电路的仿真模型晶闸管直流双闭环调速控制系统建模与仿真
四象限斩波控制直流调速系统在MATALB/Simulink中的仿真模型[6~10]如图5所示.其中图5(a)为调速系统整体仿真模型,它主要由五个部分组成: 直流电动机模块、斩波器模块、电流控制器模块、速度控制器模块以及开关模块.调速系统仿真模型采用双闭环控制,内环采用电流控制,外环采用转速控制.转速控制器模块的仿真模型如图5(b)所示.转速给定N*和反馈信号N经过采样开关输入,转矩给定N*经过加减速限制环节,以避免在突然增加给定时引起电枢过电流.转速反馈信号N经过低通滤波器,PI调节器的结构与电流调节器相同,调节器输出是电枢电流的给定,如果是转矩控制方式,则转速控制不起作用.电流控制器模块仿真模型如图5(c)所示.端口Ia输入的电枢电流反馈经过零阶保持器低通滤波器滤波,输入电流调节器,电流控制器的输出为PWM生成的脉宽控制信号,由PWM模块生成IGBT的驱动信号Pulse.
3.2 仿真结果及分析
四象限斩波控制直流调速系统仿真结果如图6所示.图6(a)为电枢电压仿真波形,从图6(a)可以看出直流电动机的电枢电压为有正有负的矩形波.如果通过改变调速系统的占空比,那么其电枢电压的输出有效值也发生变化,从而可以改变电机的转速,这就是所谓的改变电枢电压调速.图6(b)为直流电机的转速和电枢电流仿真波形,从图6(b)可以看出电机的正反转运行过程.具体工作过程为电动机在启动时给定的转速为500r/min,电动机从静止开始启动,在1.3s时上升到500r/min,上升加速度为400r/min2,电枢电流也匀速上升.当电动机速度达到给定值500r/min后进入稳定正转状态,电枢电流略有下降,因为不需要再加速仅需要与负载转矩保持平衡.在2s时转速给定改为−1184r/min,由于转速调节器和电流调节器的调节作用,使电枢电压和电枢电流下降,电磁转矩也随之减小,电动机开始减速.在3s时,电流反向,产生制动转矩.到3.25s时,转速下降到零,在反向电流作用下,电动机转速改变,并且负载转矩也随转速变负,电动机以−400 r/min2加速度反方向加速,在6.3s时到达−1184r/min,完成了电机从500r/min的正转到−1184r/min的反转过程的调速过程.从图6可以得出以下结论: 四象限斩波控制直流调速系统稳定性非常好,而且可以实现电动机的无级调速,并且可以实现电机的正反转,满足各种场合的应用.
图7为四象限斩波控制直流调速系统占空比不同时的电枢电压仿真波形,其中(a)和(b)分别为第1s时和第6s时的电枢电压占空比仿真波形.从图7(a)所示的占空比仿真波形可以看出电机第1s时,正向电枢电压占空比比反向电枢电压占空比大,说明电动机处于正向加速正转状态.从图7(b)所示的占空比仿真波形可以看出在电机第6s时,反向电枢电压占空比明显比正向的电枢电压占空比大,说明电动机处于反向加速反转状态.
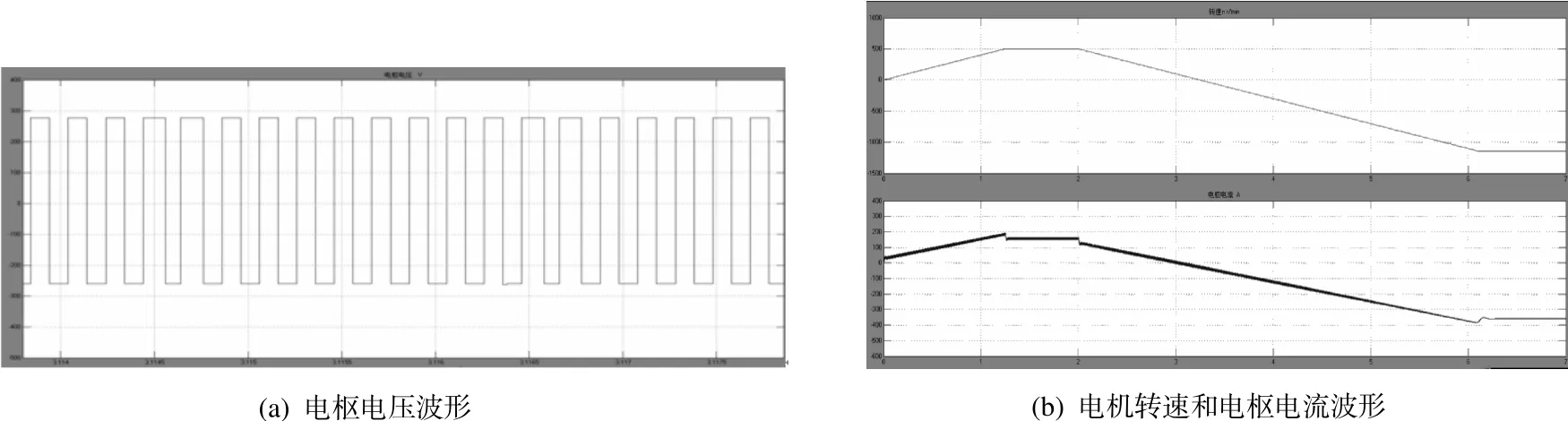
图6 四象限斩波控制直流调速仿真波形
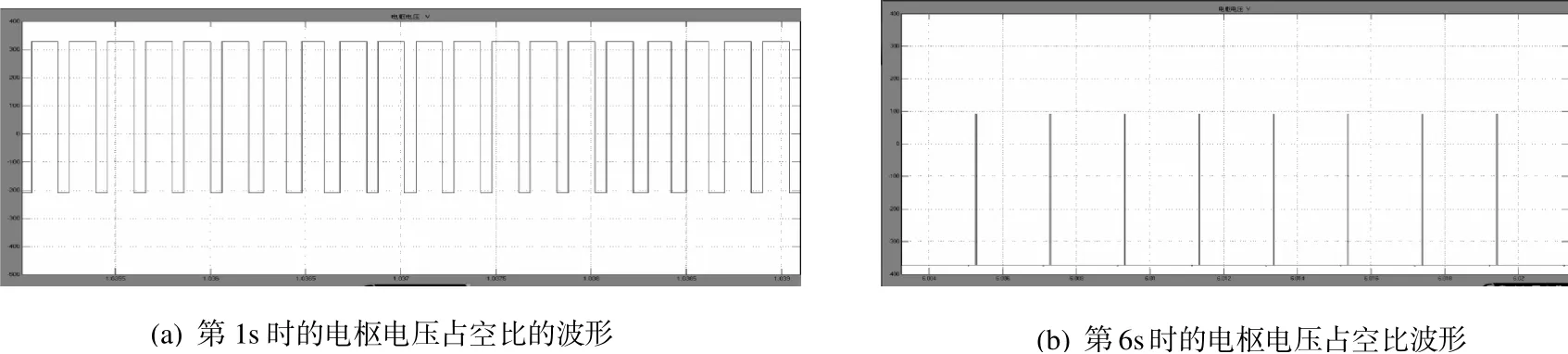
图7 四象限斩波控制直流调速系统的电枢电压占空比的仿真波形
为了说明四象限斩波控制直流调速系统与一象限斩波控制以及二象限斩波控制直流调速系统的差别,本文也给出了它们的仿真结果,如图8和图9所示.其中图8(a)为一象限斩波控制直流调速系统的转速n仿真波形.从图8(a)可以看出一象限斩波控制直流调速系统的转速n有明显的波动,并且有不小的超调现象,说明一象限斩波控制直流调速系统的稳定性要比四象限斩波控制直流调速系统差.图8(b)为电枢电流和电枢电压仿真波形.从图8(b)可以看出电机的电枢电压和电流都为正,所以电机只能工作在正向电动状态和第一象限,而不能像四象限斩波控制直流调速系统可以工作在四个象限,因此应用范围小很多.

图8 一象限直流斩波控制直流调速系统的仿真波形

图9 二象限直流斩波控制直流调速系统的仿真波形
图9(a)为二象限斩波控制直流调速系统的转速n仿真波形,从图9(a)可以看出其转速n波动情况大,因此稳定性要比四象限斩波控制直流调速系统差.图9(b)为电枢电流和电枢电压仿真波形.从图9(b)可以看出电枢电压并未改变方向,但是电流为正负交替改变,所以二象限斩波控制直流调速系统可以使电机工作在正转电动和正转再生制动状态,分别工作在第一、二象限.
4 结论
本文首先介绍了直流电机的数学模型,阐述了直流电机调速的三种基本方式,通过比较,选择改变电枢电压作为直流电机的调速方法.根据改变电枢电压调速,研究了四象限斩波控制直流调速系统的工作原理,并在Matlab/Simulink中对其进行了仿真验证.仿真结果表明四象限斩波控制直流调速系统可以使电机在四个象限工作,并可处于正转电动状态、正转再生制动状态、反转电动状态以及反转再生制动状态.最后还给出了一象限和二象限斩波控制直流调速系统的仿真结果,与四象限斩波控制系统相比较可知,四象限调速范围更宽,稳定性更好,因此四象限斩波控制直流调速应用范围更广,而且精度更高.
参考文献
[1] 王 苏.直流电机PWM 调速研究及单片机控制实现[J].机电工程技术,2008 ,37(11): 82~84,95
[2] 潘艳艳,曹 华,陶彩霞.直流电机双闭环调速系统的动态模型仿真[J].重庆工学院学报(自然科学)2009,23(8): 149~156
[3] 李永龙,李祖枢,王 牛.直流电机双闭环调速系统(DLM)的建模与辨识[J].控制理论与应用,2008,25(6): 1077~1080
[4] 唐 介.电机与拖动[M].第2版.北京: 高等教育出版社,2007
[5] 王 刚.直流电机伺服控制技术研究与实现[D].大连: 大连理工大学硕士学位论文.2013
[6] 王兆安,刘进军.电力电子技术[M].第5版.北京: 机械工业出版社,2009
[7] 荣 军,丁跃浇,张 敏,等.对转永磁无刷直流电机建模与仿真[J].湖南工业大学学报,2010,24(5): 33~36
[8] 谢志诚,李益华,林利红.无刷直流电机双闭环控制系统的建模与仿真[J].计算技术与自动化,2009,28(3): 41~44
[9] 张克涵,狄正飞,刘晓强,等.基于Matlab 无刷直流电机双闭环调速系统仿真研究[J].微电机,2015,48(2): 44~48
[10] 王 峰,杨文焕,杨凯辰,等.无刷直流电机变频调速控制系统仿真研究[J].电子科技,2015,28(6): 100~102
Technology Research of DC Speeding for Four-quadrant Chopper Control System
LI Yi-ming1,RONG Jun2,DENG Bin1,YI Xue-liang1
(1.College of Computer Science,Hunan Institute of Science and Technology,Yueyang 414006,China; 2.College of Information and Communication Engineering,Hunan Institute of Science and Technology,Yueyang 414006,China)
Abstract:DC motor has wide speeding range and high precision,and it has very important application for the industrial fields required to speeding and braking performance.Firstly,the mathematical model of DC motor is introduces,and the three methods of its speed regulation are given,and the method of changing the armature voltage is chosen as the method of its speed regulation.Then the working principle of DC speeding system for four-quadrant chopper control is analyzed in detail,and the models is established based on Matlab/Simulink,and the simulation results are given.Through the analysis of simulation results,the simulation results are consistent with the theoretical analysis,and the correctness of theoretical analysis and modeling simulation of DC speed control system for the four-quadrant chopper control is verified.Finally,the advantages of DC speed control system for the four-quadrant chopper control are highlighted by comparing the simulation results with the other two kinds of chopper DC drive system.
Key words:DC speeding,four-quadrant,chopper controlling,modeling and simulation
作者简介:李一鸣(1979−),女,湖南岳阳人,硕士,湖南理工学院计算机学院讲师.主要研究方向: 计算机仿真技术
基金项目:车辆安全性设计与可靠性技术湖南省高校重点实验室基金资助(KF1608,2014kfjj01); 湖南省教育厅一般项目(15C0620,15C0622)
收稿日期:2015-12-08
中图分类号:TP341
文献标识码:A
文章编号:1672-5298(2016)01-0042-06
