多功能越野车双横臂前悬架的纯运动学仿真研究
2016-05-05 01:19:48田德明王成立洪学臣
汽车实用技术 2016年3期
田德明,王成立,洪学臣
(安徽江淮汽车股份有限公司轻型商用车研究院,安徽 合肥 230601)
多功能越野车双横臂前悬架的纯运动学仿真研究
田德明,王成立,洪学臣
(安徽江淮汽车股份有限公司轻型商用车研究院,安徽 合肥 230601)
摘 要:悬架系统作为连接车身与轮胎的重要系统,在进行硬点布置设计时,应该对悬架系统的运动进行空间位置校核分析,以保证不同工况的轮胎跳动轨迹的不会与其他零部件干涉,此运动学校核的目的是确定轮胎运动至极限位置时的轮廓,从而检查车轮与车身、轮罩、纵梁之间的运动间隙是否足够,并由此决定车身及轮罩的的最小尺寸边界,为整车总布置设计工作提供数据参考。
关键词:双横臂悬架;运动学;硬点;DMU
10.16638/j.cnki.1671-7988.2016.03.013
CLC NO.: U463.3 Document Code: A Article ID: 1671-7988(2016)03-40-03
引言
悬架系统是汽车底盘的灵魂,也是汽车操纵稳定性的灵魂,理解悬架运动学特性对操纵稳定性能会有更深的理解。汽车悬架是车架(或车身)与车桥(或车轮)之间弹性连接的部件,主要由弹性元件、导向装置及减振器三个基本部分组成。
设计车前悬采用双横臂悬架,它是将减振器与螺旋弹簧装配成支柱总成作为悬架系统的一部分加以利用,并将支柱总成与上下摆臂组装在一起,该种悬架用于中型以下的轿车上,它主要用在轿车的前轮上,也用于运动性汽车的后轮上。双横臂悬架的优点在于一般比麦弗逊悬架的侧倾中心低,车身倾斜时轮距变化小,有利于减小轮胎磨损量,同时横向刚度大,可以降低转向轮摆振的发生,并且双横臂悬架的主销轴线不通过减振器,由转向节上下球头销连线作为主销轴线,故减振器不收侧向力,提高减振器寿命。缺点在于占用空间比麦弗逊大同时侧倾中心也会导致侧倾角刚度较小,车身转角较大,实际上麦弗逊就是双横臂的简化而,双横臂又是多连杆的特例或简化。
1、运动特性理论校核
1.1 校核目的
在进行布置设计时,为防止发生前轮运动时与其他件干涉,必须对前悬系统的运动特性进行校核分析。此校核的目的是确定前轮胎运动至极限位置时占用的空间,需同时考虑上跳及转向至极限位置时的情况,从而检查车轮与轮罩、车架纵梁之间的运动间隙是否足够,并由此决定前轮罩设计的最小尺寸边界。
1.2 校核工况
前悬系统的运动校核主要分两种状态:第一种是悬架系统在反跳、空载、满载以及上跳极限载荷状态情况下,上下摆臂的摆动以及转向拉杆的运动;第二种就是轮胎在转向器的驱动下,在反跳、空载、满载以及上跳极限载荷状态情况下的转动,转动范围是轮胎的最大左右极限转角。通常悬架的上调极限工况下取缓冲块被压缩到2/3的状态,而轮胎反跳的极限则选取一侧轮胎跳起后下垂的情况。
2、基于Catia的悬架运动分析流程
2.1 建立双横臂悬架总成的三维装配数据模型
2.1.1 生成各个部件的part模型
将目标DMU机构中的所有部件Product生成零件Part,如上摆臂总成,通过工具栏中的Tools-Generate Catpart from product,依次将横向稳定杆、上摆臂总成、摆臂总成、前轮胎与前轮毂总成、车轮总成、车架总成以及转向器总成全部转化为Part。
2.1.2 车轮状态的选择
设计越野车轮胎型号为245/65R17,在进行轮胎跳动校核时,轮胎主要尺寸按照国家标准GB/T 2978中的轮胎最大使用尺寸,即轮胎外径为762mm,轮胎宽度258mm。
2.1.3 进入DMU Kinematics仿真模块

图1 Catia V5R19的 DMU Kinematics模块
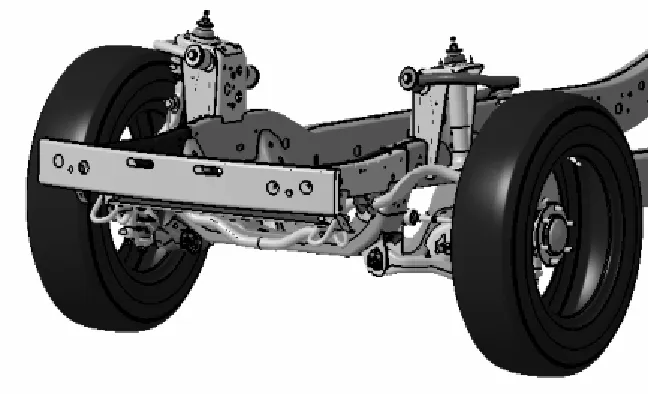
图2 双横臂悬架DMU机构模拟模型
本次分析使用的软件Catia V5R19版本的DMU模块,如图l所示;进入Catia运动分析模块导入2.1.1中创建的Part建立一个双横臂式悬架总成模型,包括前支柱总成简化模型(由于主销为上下摆臂球销连线支柱总成运动时只考虑轴线运动)、横向稳定杆、上摆臂总成、摆臂总成、前轮胎与前轮毂总成、车架总成以及转向器总成。见图2。
2.2 运动副的创建和施加
2.2.1 运动分析参照物的选择和点线面的选取
设计车配有独立车架,故DMU运动仿真时选取车架作为参照物。如图3,通过所有DMU中的运动副连接依靠基础都是两个零部件中的点、轴线、垂直或平行于轴线的平面,如球头连接依靠的是点、旋转接头依靠的是旋转轴线和轴线的法向平面、滑块接头依靠的是线和平行于轴线的面。常用运动副如图4。
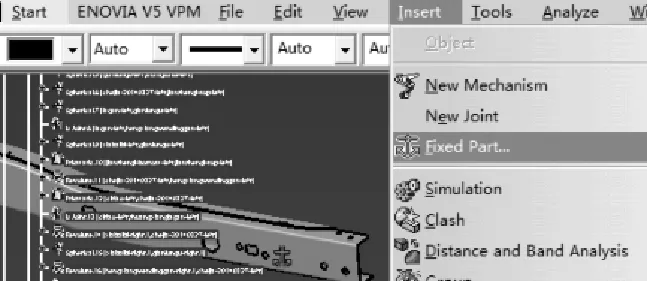
图3 Catia V5Rl9 固定命令

图4 Catia V5Rl9 常用运动副
2.2.2 旋转接头运动副
本文介绍一处下摆臂与车架之间的旋转连接。如图5,选中旋转副命令,按照Catia左下角的命令提示一次选取车架的旋转轴线,摆臂的旋转轴线,车架中的平面,摆臂中的平面,点击OK完成旋转运动副施加。依据悬架中各零部件的连接关系完成其他生成好的Part的运动副约束连接,见图6。
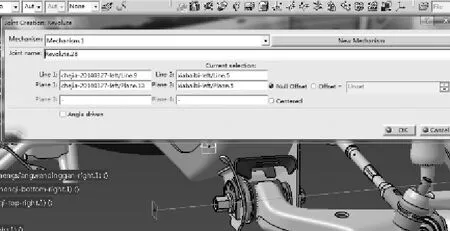
图5 Catia V5R19旋转运动副命令

图6 双横臂悬架总成数学模型
2.3 双横臂悬架的运动仿真
2.3.1 驱动点的参数设定
运动副施加完毕后要选取运动机构的驱动才能进行预先计划好的运动学分析,驱动点可在在设置好的运动副中选取,但要通过反跳、半载、满载、上跳的轮心位置进行合理转换完成驱动点运动参数的设定。
表1轮心在反跳、空载、半载和满载情况下的坐标值及转化完成的DMU驱动参数,本次驱动选择为上摆臂的旋转角度,轮胎受转向机制的运动依据转向机的行程完成DMU驱动参数设置。见图7。
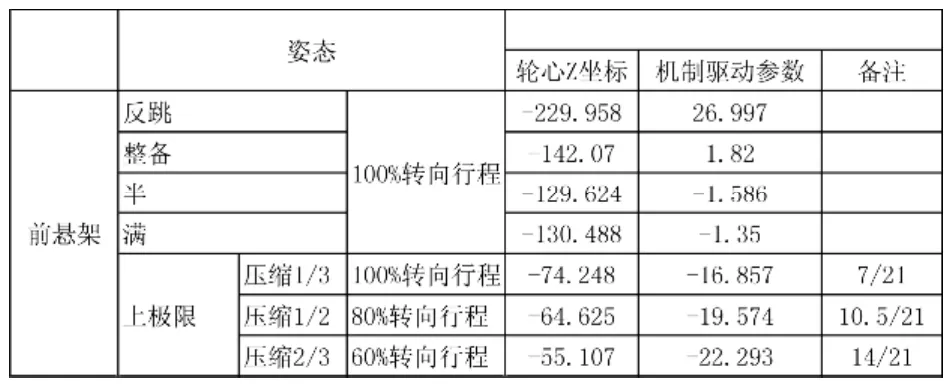
表1 双横臂悬架轮心坐标及DMU机制驱动参数
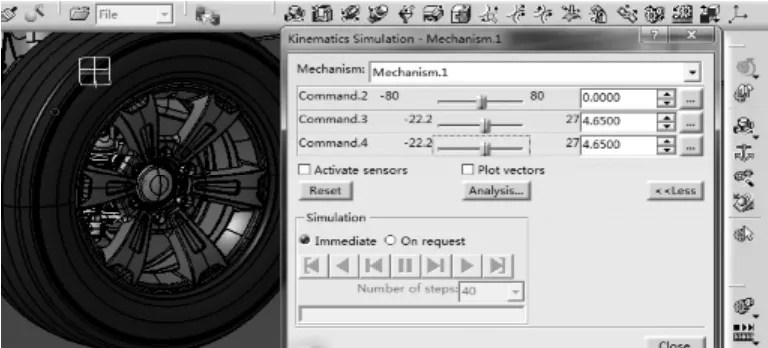
图7 前轮胎轮心
2.3.2 基于CatiaV5R19的运动仿真执行
本论文中使用到的Catia运动学仿真命令是实现运动件动态间隙的曲线输出,如图9所示。具体操作步骤是:
(1)用测量命令测量出两个零件的间隙;
(2)启动模拟机制在弹出的对话框中选择详细(more)之后启动感应器(Activate sensors),在对话框中选择你要输出间隙曲线的测量项单击会变成yes;
(3)选中要求(on request),手动设计驱动运动路径;
(4)单击图形(graphics),图形输出完毕。依据上述表格中的上摆臂角度驱动(-22.2,26.9)及转向机的驱动(-80,+80)在已经建立仿真模型中可以模拟出转向系零部件、悬架系统零部件、轮胎总成及作为参照的车架总成之间的获得运动间隙。
图10为通过仿真功能得到的横向稳定杆表面和减振器表面在转向驱动与上摆臂驱动的动态间隙。最重要的是可以通该运动学特性模型可以获得轮胎的包络仿真并输出。
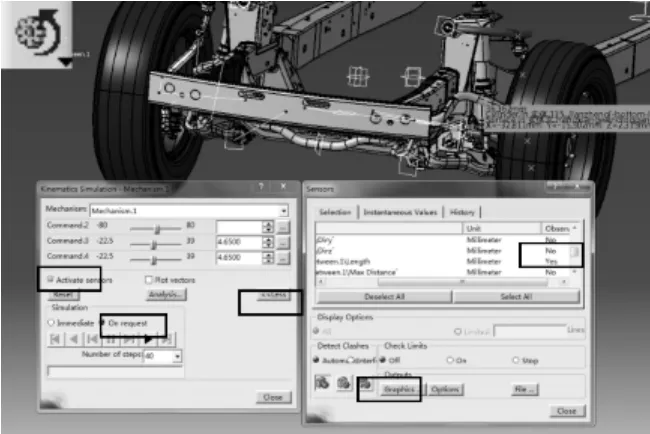
图9 catia 运动件间隙测量命令
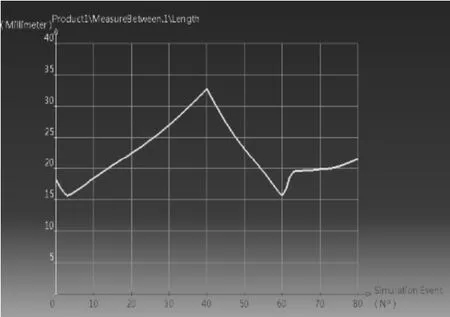
图10 下摆臂和横向稳定杆连杆的间隙
轮胎的运动包络,可以整车其他部件的布置提供可靠依据,而设计车的缓冲块结构为通过缓冲块的骨架与车架焊接螺母螺接固定,故设计车校核轮胎上跳极限状态时,还应考虑缓冲块脱落时最为上跳极限的工况,通过Catia的DMU的运动学仿真可以得到图11所示的轮胎包络,校核出缓冲块脱落的轮胎与车身之间的最小距离为60mm。
3、结论
根据前悬运动的分析结果,可以测量出分析系统中零部件之间是否存在干涉、间隙数值,生成的前包络面可以看出前轮胎在空载、半载、满载和极限状态下的运动范围,是否与前轮罩、纵梁之间产生干涉,为以后的整车总布置设计工作提供了充足的依据,同时也为理论计算提供了直观的参考。
参考文献
[1] 陈家瑞.汽车构造[M]机械工业出版社.2005.第二版.
[2] 张承海.基于虚拟样机的多连杆悬架系统运动学仿真研究[D].湖北:武汉理工大学,2008.
[3] 王侃,杨秀梅.虚拟样机技术综述[J]新技术新工艺,2008,(3):29—32.
[4] 余志生.汽车理论[M].北京:机械工业出版社,2006,第四版.
[5] 王国权,许先锋,王蕾等.汽车平顺性的虚拟样机试验[J]农业机械学报,2003(3):26—28.
Double wishbone type Suspension Kinematics Analysis
Tian Deming, Wang Chengli, Hong Xuechen
(Commercial Car Research Academy of JAC, Anhui Hefei 230601)
Abstract:The vehicle suspension is a very important part in the modern automobile.During the general disposition design on thewhole car, we must do the checking analysis of the suspension system movement to avoid the interference between tires and other components.The check is to confirm the occupying space of the tire when moving to the extreme position,to check the movement play among the wheel,the wheelcover and the sole bar is enough,and by this make a decision on the mini dimension limit of the designing wheel cover,which offers enough basis for the following general disposition design work on the whole car.
Keywords:Double wishbone type; suspensionkinematics; hard points; catia
作者简介:田德明,就职于安徽江淮汽车股份有限公司轻型商用车研究院。
中图分类号:U463.3
文献标识码:A
文章编号:1671-7988(2016)03-40-03
猜你喜欢
科学咨询(2021年31期)2021-12-29 18:29:19
中国铁路(2020年7期)2020-10-09 07:43:24
河北省科学院学报(2020年1期)2020-05-25 06:57:18
电子制作(2019年15期)2019-08-27 01:12:16
制造技术与机床(2018年11期)2018-11-23 01:07:50
北京汽车(2018年2期)2018-05-02 02:01:24
中国设备工程(2018年7期)2018-04-21 03:43:39
海军航空大学学报(2015年1期)2015-11-11 17:18:37
机械制造与自动化(2014年1期)2014-03-01 04:22:01
筑路机械与施工机械化(2014年8期)2014-03-01 03:01:29