
船舶码头系泊的耦合动力响应分析
2016-04-24 03:18:21嵇春艳郭建廷郭宇婵袁培银
舰船科学技术 2016年10期
嵇春艳,郭建廷,崔 杰,郭宇婵,袁培银
(1. 江苏科技大学 船舶与海洋工程学院,江苏 镇江 212003;2. 重庆交通大学 航运与船舶工程学院,重庆 400074)
船舶码头系泊的耦合动力响应分析
嵇春艳1,郭建廷1,崔 杰1,郭宇婵1,袁培银2
(1. 江苏科技大学 船舶与海洋工程学院,江苏 镇江 212003;2. 重庆交通大学 航运与船舶工程学院,重庆 400074)
以码头系泊船舶为研究对象,利用水动力软件 AQWA,分析不同浪向角对其运动响应幅值算子和一阶波激力的影响,并在时域耦合分析的过程中,对系泊系统进行优化,从船舶运动响应和系泊缆张力 2 个方面,对沿型深方向优化和尾横缆优化的结果进行分析。计算结果表明,不同的优化方案对船舶的运动响应和系泊缆张力的影响不同。
码头系泊;时域耦合;动力响应
0 引 言
随着国际航运事业的发展,人们对于船舶码头的需求量正在不断增大,随着开敞式和半开敞式码头的增多[1],码头系泊船舶所处的自然环境越来越恶劣,因此对码头系泊船舶的研究正日益受到科研人员的关注,为了保证船舶的系泊安全和货物的正常装卸,对其进行水动力性能分析是很有必要的[2,3]。
码头系泊是一个复杂、非线性和多重耦合的系统,由码头、船舶、护舷和系泊缆组成。对其进行研究主要集中在船舶的运动响应和系泊缆张力 2 个方面[4,5]。在运动响应研究方面,徐兆全[6]通过总结试验和对比分析得出,在风浪流的联合作用下,船体 6 个自由度的运动响应在不同海况、不同装载吃水等条件下表现出不同的运动特性;天津大学发表的研究[7]表明,船舶的运动存在着许多非线性现象,在实际问题的研究过程中不能忽略。在系泊缆张力研究方面,刘必劲[8]研究了在波浪作用下,大型开敞式码头系泊船舶的系泊缆受力情况,并总结了系泊缆张力计算公式。刘宇[9]重点研究了波浪周期对码头系泊船舶的影响,提出当风浪流条件比较恶劣时,应当随时调整缆绳数量,从而保证系泊安全。
目前对于码头系泊问题的研究,大部分都是通过模型试验的方式,进行数值仿真研究的相对较少[10-11]。本文利用 Ansys-AQWA 软件,基于三维势流理论,对船舶的水动力性能和系泊形式进行研究,沿型深方向对系泊缆进行优化,为码头系泊船舶系泊方式的优化提供新的思路。
1 环境载荷的计算
1.1 风载荷
根据 OCIMF(Oil Companies Internationalmarine Forum)规范的有关规定,船舶受到的纵荡方向风力Fxw、横荡方向风力 Fyw和首摇风力矩mxyw分别为:
式中:系数 Cxw、Cyw和 Cxyw,可根据不同的吃水情况(满载或者是压载)、不同的角度和不同的船型进行选取;ρw为空气密度;Vw为风速;AT为船舶的横向受风面积;AL为船舶的纵向受风面积;LBP为船舶的垂线间长。
1.2 流载荷
根据 OCIMF(Oil Companies Internationalmarine Forum)规范的有关规定,船舶受到的纵荡方向流力Fxc、横荡方向流力 Fyc和首摇流力矩mxyc分别为:
式中:系数 Cxc,Cyc和 Cxyc可根据不同的水深和吃水比、不同的角度、不同的吃水情况和不同的船型进行选取;ρc为海水密度;Vc为流速;LBP为垂线间长;T为吃水。
1.3 系缆力
系泊缆绳的弹性拉伸一般具有非线性规律,威尔逊提出系泊缆拉伸应力与变形间的关系式如下:

式中:FR为缆绳拉力,kN;d 为缆绳直径,m;Kc为缆绳弹性常数,对尼龙缆,Kc=1.56×104mPa,对丝缆,Kc=2.75×105mPa;n 为与材特性有关的指数,对尼龙缆 n=3,对钢丝缆 n=1.5;∆S/S 为缆绳相对伸长。



式中:Ix为沿 X 轴的位移;Iy为沿 Y 轴的位移;θ 为相对于 X 轴的转角。
2 码头系泊船舶水动力频域分析
本文以 Ansys 软件建立有限元模型,目标船舶的长宽比为 6∶1,排水量为 30 000 t。通过 AQWA-LINE模块,对船舶进行频域水动力性能分析,选取计算水深 20m为研究对象。由于模型沿 X 轴左右对称,在计算的过程中,采用的浪向角为 0°,-30°,-60°,-90°,-120°,-150° 和 -180°。

从图1 中可看出,纵荡、横荡和垂荡的 RAO 随着频率的增加都呈下降趋势;当入射角为 0°~-90° 时,纵荡 RAO 随着入射角的增大而减小,横荡和垂荡 RAO随着入射角的增大而增大,当入射角为 -90°~-180°时,变化规律正好相反。
横摇、纵摇和首摇 3 个旋转自由度上的 RAO 随着频率的增加都是先增大后减小的过程,与纵荡、横荡和垂荡方向上的 RAO 类似,当频率小于 0.8 rad/s 时,运动响应幅值算子随频率的波动较大,且有峰值出现,当频率大于 0.8 rad/s 时,随频率基本不变且接近于 0。

图1 运动响应幅值算子随浪向角变化曲线Fig. 1 RAO in different wave directions
3 码头系泊船舶时域耦合分析
在进行时域耦合分析时,设置 7 个护舷,每隔 8m设置 1 个,编号为 No.1~No.7,护舷采用的是SUC2250H 标准鼓型橡胶护舷,它的设计压缩变形量是 52.5%,设计反力是 2 502 kN,设计吸能为 2 472 kJ,其最大压缩变形量是 55%,最大反力是 2 659 kN,最大吸能为 2 617 kJ。系泊缆的材料为超高分子量聚乙烯,直径为 40mm,破断载荷为 1 086 kN。船上的导缆孔的位置坐标和码头上的系泊点坐标见表1。缆绳编号与船和码头的相对位置如图2 所示。在本次模拟中采用的环境条件如表2 所示。
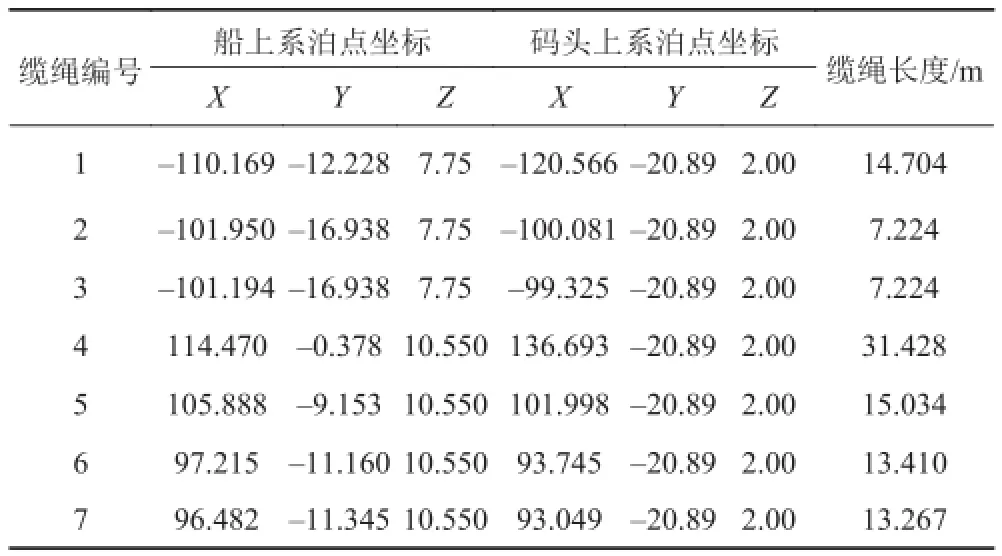
表1 系泊点坐标Tab. 1 Coordinates ofmooring points

图2 码头系泊示意图Fig. 2 Mooring at the dock
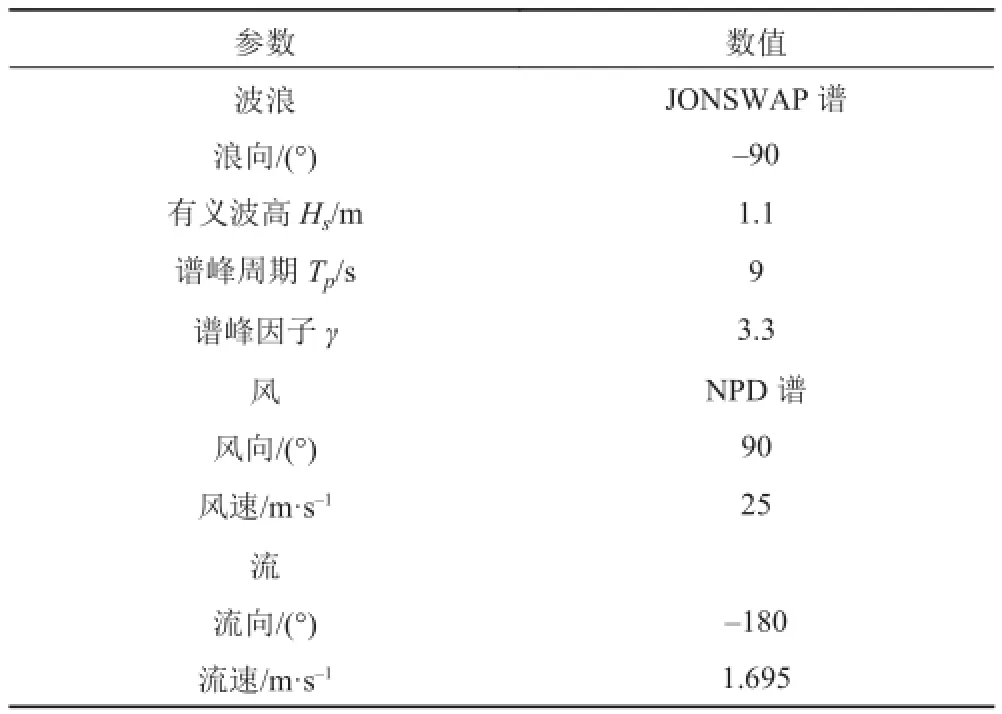
表2 环境条件Tab. 2 Environmental conditions
3.1 沿型深方向优化分析
为了研究船上系泊点的位置沿型深方向变化对船舶水动力响应的影响,在原有系泊方式的基础之上,又设计了 2 种系泊方式,但码头上的系泊点并没有变化,只是船上的系泊点有变化,如表3 所示。从表3可看出,优化方案 1 在原有系泊方式的基础之上,提高系泊点的坐标,优化方案 2 在原有系泊方式的基础之上,降低系泊点的坐标,它们的 X 值和 Y 值都没有变化,只有 Z 值发生改变。
3.1.1 沿型深方向优化运动响应分析
表4 给出了不同系泊方式下,船舶重心处 6 个自由度上的运动响应的统计特性。Higher 表示优化方案 1的结果,Original 表示原有系泊方式的结果,Lower 表示优化方案 2 的结果。
从表4 中可看出,系泊方式沿型深方向的优化,对船舶的垂荡和纵摇的影响不大,对纵荡、横荡、横摇和首摇的影响较大;系泊方式的升高,会使船舶的运动响应增大,而系泊方式的降低,会使船舶的运动响应变小。以纵荡为例,当系泊方式升高时,船舶偏离原始重心位置最远,为 -7.379m,当系泊方式降低时,船舶偏离原始重心位置最近,为 -5.406m,原始系泊方案中船舶偏离原始重心位置为 -6.101m。
3.1.2 沿型深方向优化系泊缆张力分析
沿型深方向系泊方式的变化,不仅对船舶运动响应产生影响,对系泊缆张力也会产生影响,表5 给出了 7 个系泊缆张力最大值的统计特性。

表3 沿型深方向优化方案坐标值Tab. 3 Coordinates of the optimized solutions along the depth direction

表4 运动响应统计特性Tab. 4 Characteristics ofmotion response
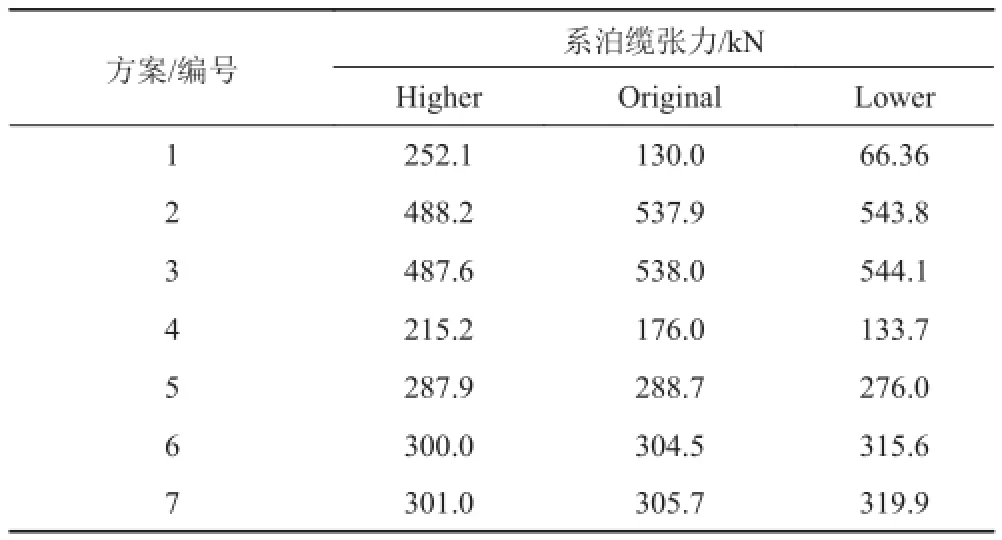
表5 系泊缆张力统计特性Tab. 5 Characteristics of tension ofmooring line

图3 3 号系泊缆有效张力时历曲线Fig. 3 Time history of tension ofmooring line 3
从表5 中可以看出,系泊方式沿型深方向的优化对船舶系泊缆张力的影响比较大。系泊方式的升高,在一定程度上会使系泊缆张力减小,会使系泊缆张力的分布更加的均匀,而系泊方式的降低,在一定程度上会使系泊缆张力升高,会使系泊缆张力的分布更加的分散。以 3 号系泊缆为例,系泊方式的升高使系泊缆张力与原来相比减小了 9.37%,而系泊方式的降低使系泊缆张力与原来相比增加了 1.13%。
为了更加形象地反映系泊方式沿型深方向的优化对船舶系缆力的影响,图3 给出了 3 号系泊缆在不同系泊方式下的受力情况,从图中可以看出,3 号系泊缆有效张力随着船上系泊点的升高而减小。
3.2 尾横缆优化分析
从前面的计算中可以发现,在风浪流的作用下,2号和 3 号系泊缆的受力相对较大,即尾横缆受力大,为了减小其受力,需要对其进行优化设计。本文的优化思路是增加尾横缆的长度,因为缆绳变长之后,弹性增加,能有效地减小缆绳受力。所以在进行优化设计时,将码头上的尾横缆系泊点在原来的基础之上,沿船宽方向向后移动 2m,4m和 6m,其余系泊缆的系泊方式不变。
3.2.1 尾横缆优化运动响应分析
表6 给出了不同系泊方式下,船舶重心处 6 个自由度上的运动响应的统计特性。Original 表示原有系泊方式的结果,Change1 表示尾横缆后移 2m的结果,Change2 表示尾横缆后移 4m的结果,Change3 表示尾横缆后移 6m的结果。
从表中可以看出,尾横缆的优化对船舶的垂荡、横摇、纵摇的影响比较小,但是对船舶的纵荡和横荡的影响比较大。从纵荡和横荡方向上看,随着尾横缆的后移,船舶的运动响应在不断增大,但从首摇方向上看,随着尾横缆的后移,其会不断减小。以纵荡方向为例,原始的系泊方式偏离原始重心位置最远处的坐标为 -6.101m,横缆后移 2m后的系泊方式偏离原始重心位置最远处的坐标为 -6.492m,横缆后移 4m后的系泊方式偏离原始重心位置最远处的坐标为-6.914m,横缆后移 2m后的系泊方式偏离原始重心位置最远处的坐标为 -7.328m。

表6 运动响应统计特性Tab. 6 Characteristics ofmotion response
3.2.2 尾横缆优化系泊缆张力分析
对尾横缆进行优化设计,不仅对船舶运动响应产生影响,而且对系泊缆张力也会产生影响,表7 给出了 7 个系泊缆张力最大值的统计特性。

表7 系泊缆张力统计特性Tab. 7 Characteristics of tension ofmooring line
从表7 中可以看出,尾横缆优化对船舶系泊缆张力的影响比较大。随着尾横缆的后移,在一定程度上会使尾横缆张力逐渐减小,会使系泊缆张力的分布更加的均匀。根据 3.2.1 中的结论,尾横缆的后移会使船舶的运动响应变大,所以虽然在一定范围内,尾横缆的后移会使尾横缆的受力减小,但由于运动响应增大,所以也不能无条件地将尾横缆后移。以 3 号系泊缆为例,将尾横缆后移 2m与原始系泊方式相比,尾横缆受力减小了 5.69%,将尾横缆后移 4m与原始系泊方式相比,尾横缆受力减小了 11.12%,将尾横缆后移 6m与原始系泊方式相比,尾横缆受力减小了15.39%。

图4 3 号系泊缆有效张力时历曲线Fig. 4 Time history of tension ofmooring line 3
为了更加形象地反映系泊方式尾横缆的优化对船舶系缆力的影响,图4 给出了 3 号系泊缆在 4 种尾横缆布置方式情况下的受力情况,从中可以更加直观地看到,随着尾横缆的后移,3 号系泊缆所受张力在逐渐减小。
4 结 语
水动力性能是船舶的重要内容之一。本文应用Ansys-AQWA 软件,对码头系泊船舶进行耦合动力响应分析,其主要结论如下:
1)从不同浪向角对船舶频域水动力性能影响中可以看出,纵荡、横荡和垂荡 3 个位移自由度上的 RAO随着频率的增加都呈下降趋势,横摇、纵摇和首摇 3个旋转自由度上的 RAO 随着频率的增加都是先增大后减小的过程,有峰值出现。
2)沿型深方向优化结果表明,系泊方式沿型深方向的优化,对船舶的垂荡和纵摇的影响不大,对纵荡、横荡、横摇和首摇的影响较大;系泊方式的升高,会使船舶的运动响应增大,但在一定程度上会使系泊缆张力减小,会使系泊缆张力的分布更加均匀;而系泊方式的降低,会使船舶的运动响应变小,在一定程度上会使系泊缆张力升高,会使系泊缆张力的分布更加分散。沿型深方向对系泊缆布置方式进行优化以及优化的结果,为码头系泊船舶系泊方式的优化提供了新的思路。
3)尾横缆优化结果表明,随着尾横缆的后移,在一定程度上会使尾横缆张力逐渐减小,会使系泊缆张力的分布更加均匀,但会使船舶的纵荡和横荡方向上的运动响应变大。
[1]黎泉. 马迹山港区卸船码头系泊安全研究[D]. 大连: 大连海事大学, 2012. LI Quan. Study on the safety ofmooring ofmajishan port[D]. Dalian: Dalianmaritime University, 2012.
[2]宋向群, 刘宇, 唐国磊. 系泊索属性对开敞式码头船舶系泊安全的影响分析[J]. 港工技术, 2010, 47(6): 18-20. SONG Xiang-qun, LIU Yu, TANG Guo-lei. Analysis ofmooring cable property influence on shipmooring safety of open terminal[J]. Port Engineering Technology, 2010, 47(6): 18-20.
[3]张健, 连建鲁, 杨勇, 等. 缆绳预张力和刚度对自升式平台码头系泊性能的影响[J]. 舰船科学技术, 2015, 37(11): 39-43. ZHANG Jian, LIAN Jian-lu, YANG Yong, et al. The influence ofmooring line's pretension and stiffness on the performance of jack up platformquaymooring system[J]. Ship Science and Technology, 2015, 37(11): 39-43.
[4]周丰, 张志明, 杨国平, 等. 码头系泊船舶系缆力及运动量数值模拟[J]. 中国港湾建设, 2010(S1): 60-63. ZHOU Feng, ZHANG Zhi-ming, YANG Guo-ping, et al. Numerical simulation on themooring line forces andmovements of amoored ship[J]. China Harbour Engineering, 2010(S1): 60-63.
[5]徐庭留, 朱克强, 周江华, 等. 大型船舶系泊系统的动力响应研究[J]. 港工技术, 2012, 49(1): 4-6. XU Ting-liu, ZHU Ke-qiang, ZHOU Jiang-hua, et al. Dynamic response research ofmooring systemfor large-scale vessels[J]. Port Engineering Technology, 2012, 49(1): 4-6.
[6]徐兆全. 浪流作用下系泊船舶运动及缆绳布局优化[D]. 大连: 大连理工大学, 2007. XU Zhao-quan. Berthing ships'movement and arrangement optimization ofmooring lines in wave and current[D]. Dalian: Dalian University of Technology, 2007.
[7]刘利琴, 唐友刚, 李红霞. 船舶运动的复杂动力特性在我国的研究进展[J]. 武汉理工大学学报(交通科学与工程版), 2006, 30(1): 183-186. LIU Li-qin, TANG You-gang, LI Hong-xia. Study on dynamic behavior of shipsmotion in China[J]. Journal of Wuhan University of Technology (Transportation Science & Engineering), 2006, 30(1): 183-186.
[8]刘必劲, 张亦飞, 徐伟. 波浪作用下大型开敞式码头系泊船舶系缆力研究[J]. 中国水运, 2010, 10(11): 5-7. LIU Bi-jin, ZHANG Yi-fei, XU Wei. Study on the ship'smooring force at the open dock under the action of the waves[J]. China Water Transport, 2010, 10(11): 5-7.
[9]刘宇, 唐国磊. 波浪周期对开敞式码头系泊安全影响研究[J].中国水运, 2010, 10(8): 30-31. LIU Yu, TANG Guo-lei. Study on the wave period's effect tomooring safety at the open dock[J]. China Water Transport, 2010, 10(8): 30-31.
[10]信书. 码头前系泊船舶运动响应的数值模拟[D]. 大连: 大连理工大学, 2005. XIN Shu. Numerical simulation on hydrodynamic response of berthing ships[D]. Dalian: Dalian University of Technology, 2005.
[11]吴小鹏. 深海半潜式钻井平台码头系泊系统数值计算与模型试验研究[D]. 上海: 上海交通大学, 2010. WU Xiao-peng. Numerical calculation andmodel test study onaquaymooring deep water semi-submersible drilling platform[D]. Shanghai: Shanghai Jiao tong University, 2010.
Analysis of coupling dynamic response of shipmooring at the dock
JI Chun-yan1, GUO Jian-ting1, CUI Jie1, GUO Yu-chan1, YUAN Pei-yin2
(1. School of Naval Architecture and Offshore Engineering, Jiangsu University of Science and Technology, Zhenjiang 212003, China; 2. Shipping andmarine Engineering College, Chongqing Jiaotong University, Chongqing 400074, China)
Taking the shipmooring at the dock as the research object, the influence of RAO and the first order wave excitation force in different wave directions are analyzed by using the hydrodynamic software AWQA.mooring systemis optimized in the process of coupling analysis in the time domain. The results of optimizing along the depth direction and optimizing the stern lines are analyzed through the aspects ofmotion responses and tension of themooring lines. The results show that different optimized plans have the different influence onmotion responses and tension of themooring lines.
mooring at the dock;coupling in the time domain;dynamic response
U661.3
:A
1672 - 7619(2016)10 - 0046 - 06
10.3404/j.issn.1672-7619.2016.010.009
2016 - 03 - 01;
2016 - 04 - 08
国家自然科学青年基金资助项目(51209107);国家自然科学基金资助项目(51379095)
嵇春艳(1976 - ),女,教授,研究方向为船舶与海洋结构物的力学性能、动力性能及减振方法。
猜你喜欢
舰船科学技术(2022年20期)2022-11-28 08:19:02
山东冶金(2022年2期)2022-08-08 01:50:50
环球时报(2022-07-29)2022-07-29 20:11:23
新世纪智能(高一语文)(2020年9期)2021-01-04 00:42:52
中华诗词(2018年4期)2018-08-17 08:04:12
宝藏(2017年6期)2017-07-20 10:01:02
宝藏(2017年6期)2017-07-20 10:01:01
小星星·阅读100分(高年级)(2017年2期)2017-02-24 09:27:00
作文与考试·小学高年级版(2016年7期)2016-05-14 05:39:03
工业设计(2016年11期)2016-04-16 02:48:21
